Evaluation of a Framework for Visual-Feedback Training Based on a Modified Self-Organizing Map Using Sensing Information Including Muscle Activity †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
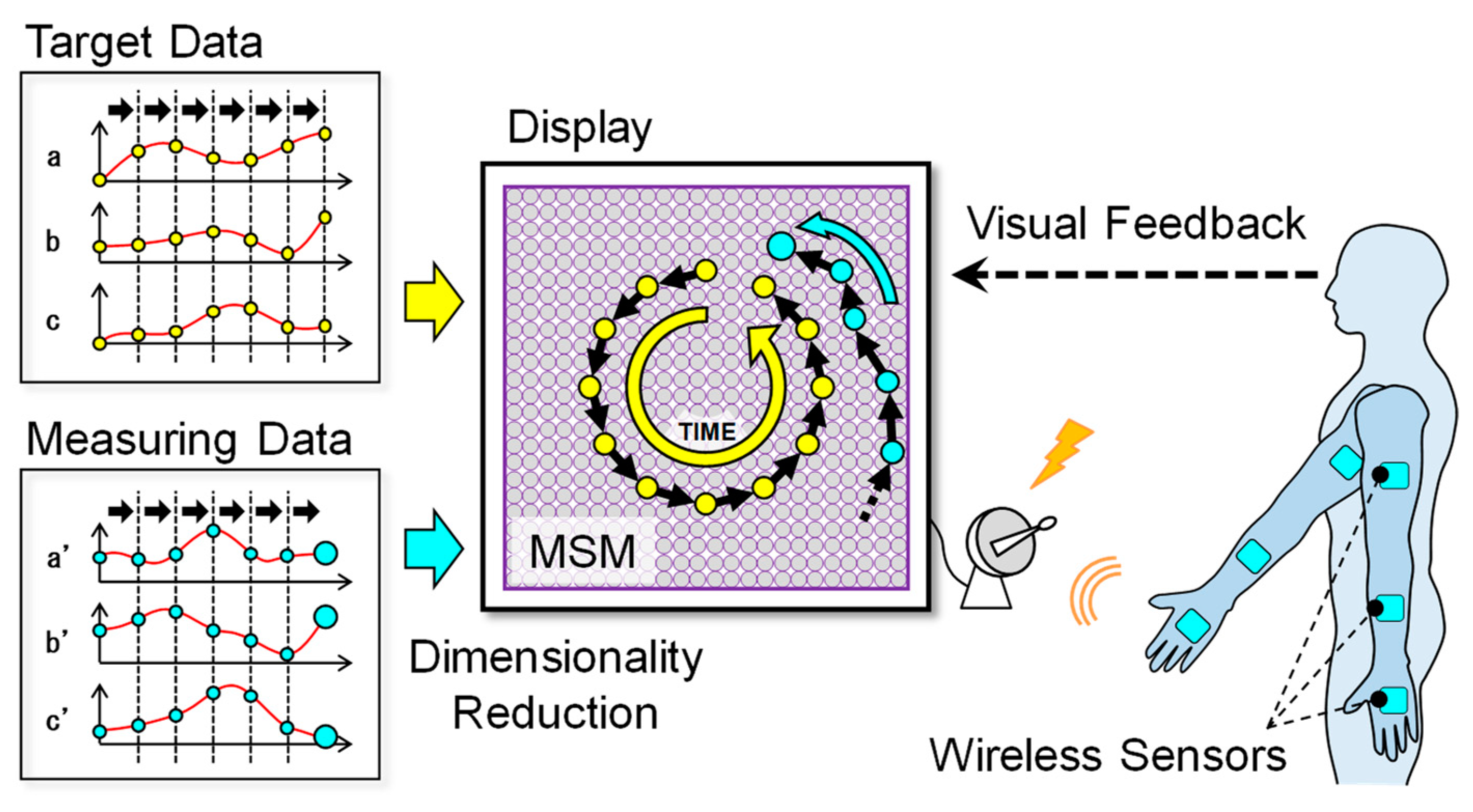
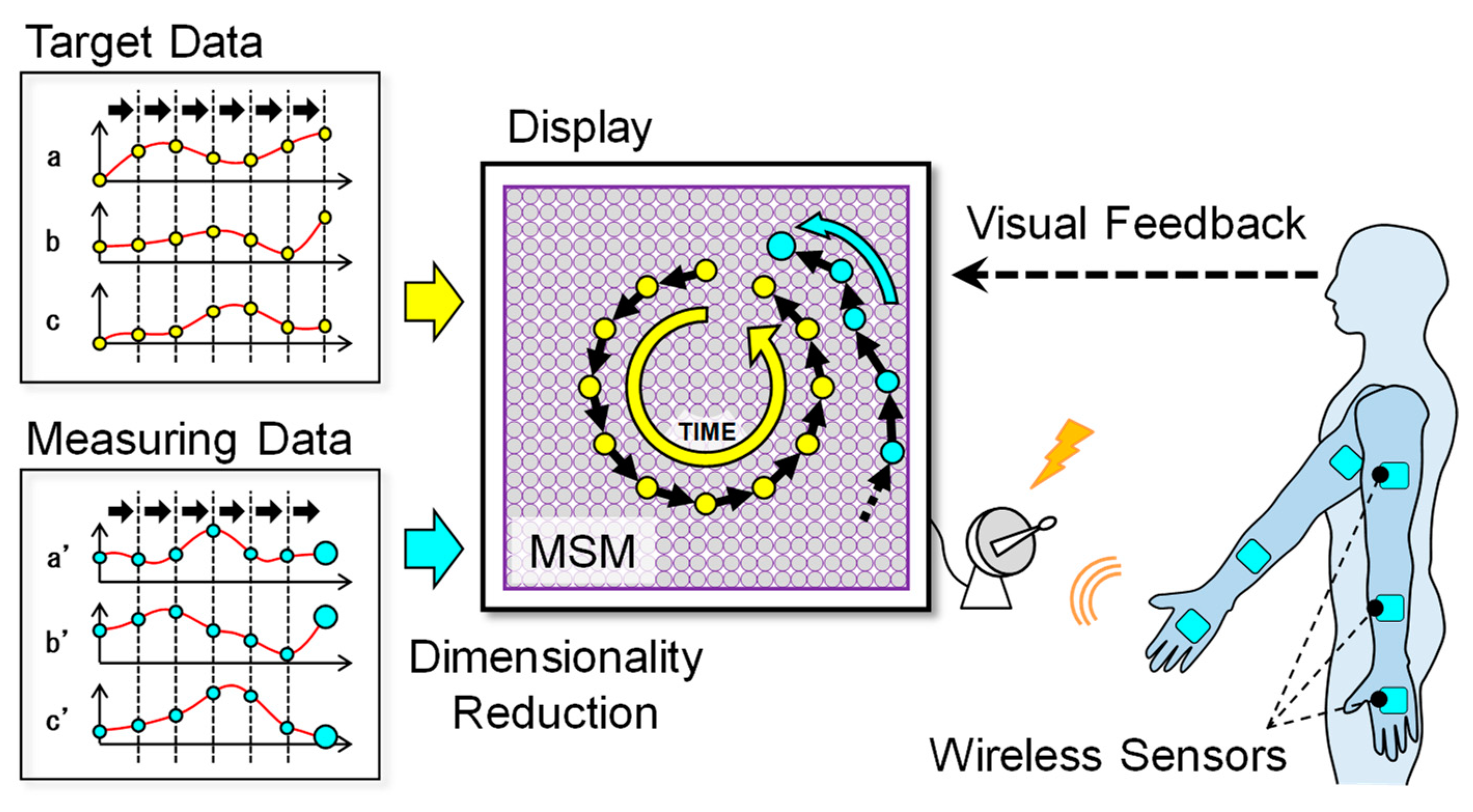
2.1. Framework for Visual-Feedback Training
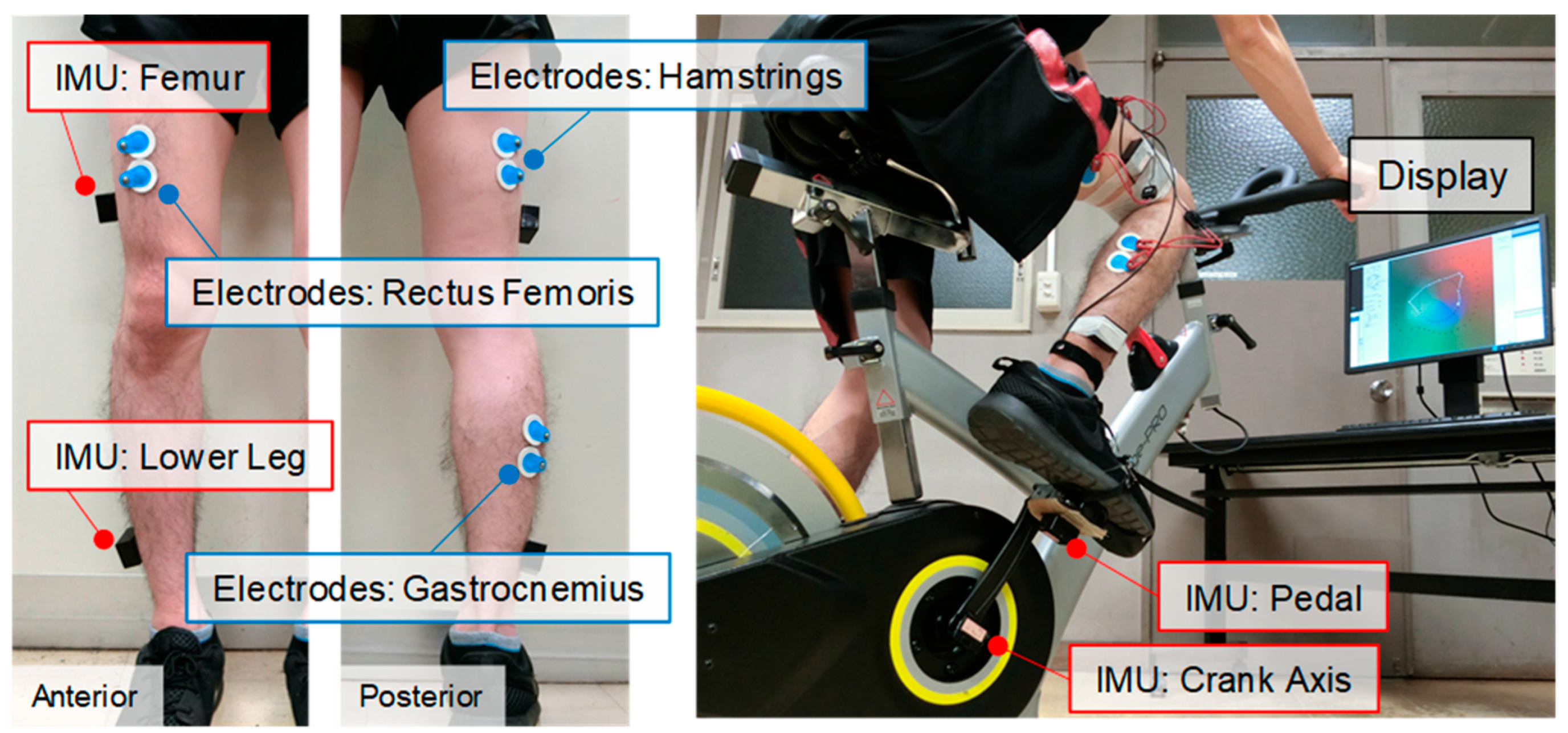
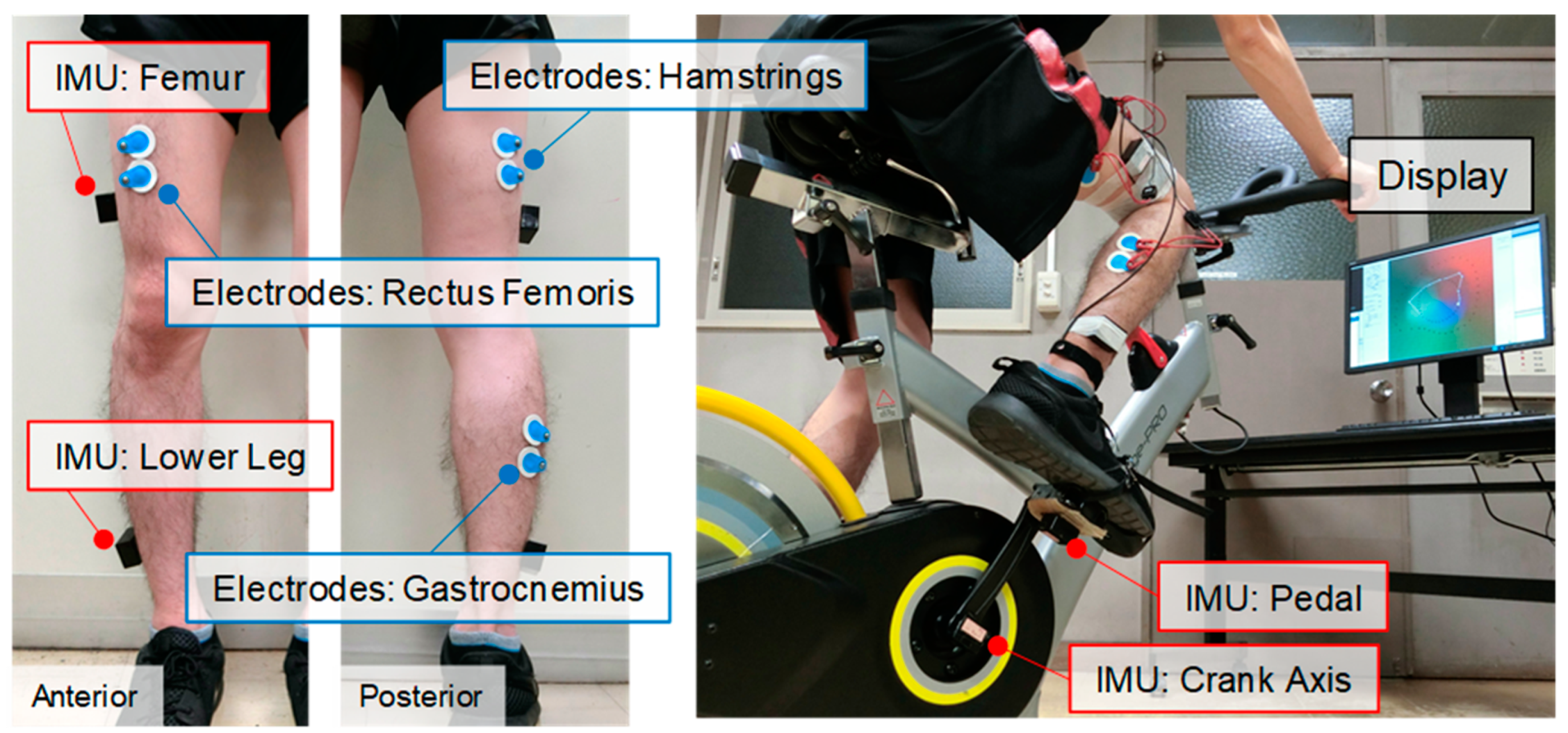
2.2. Experimental Conditions
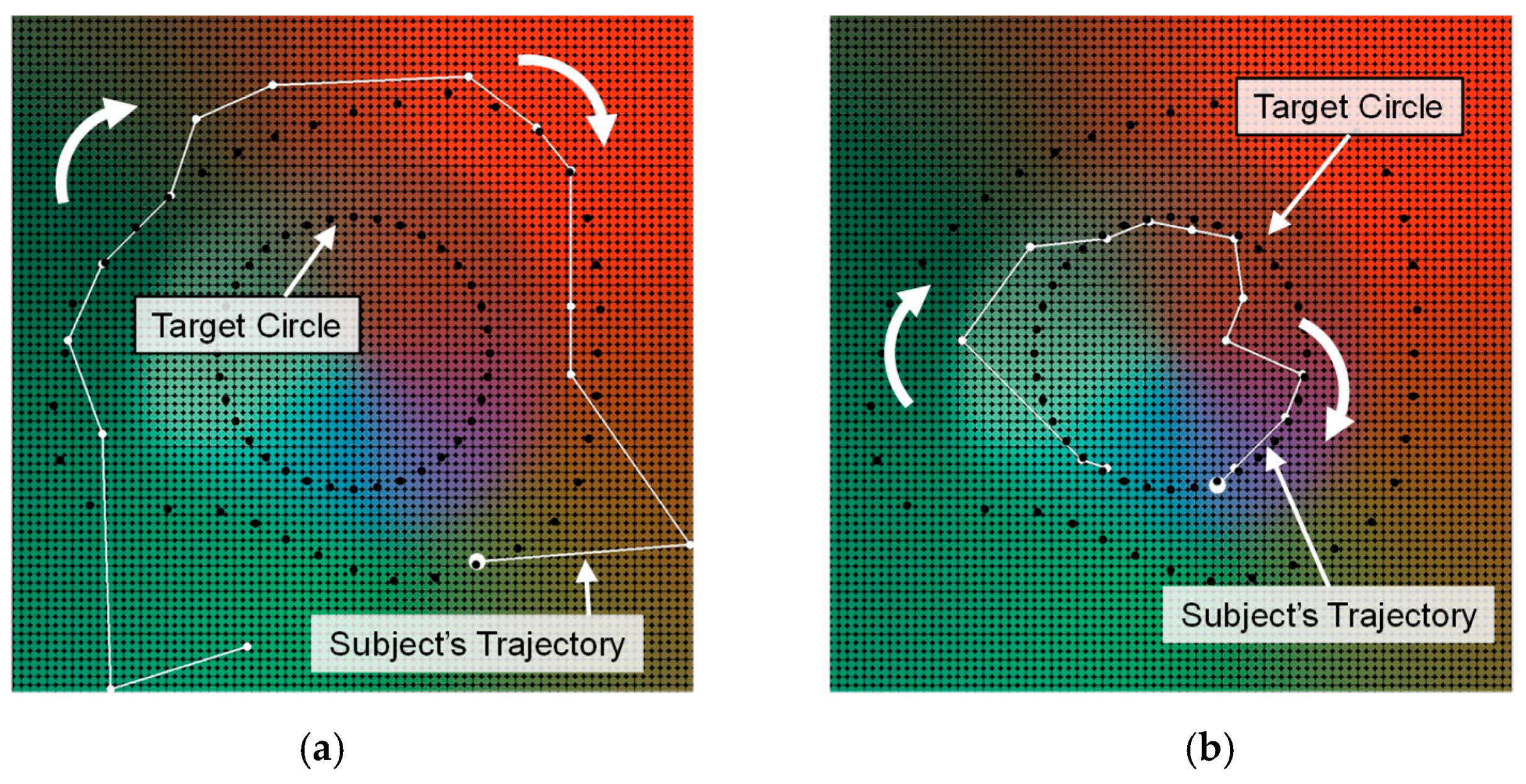
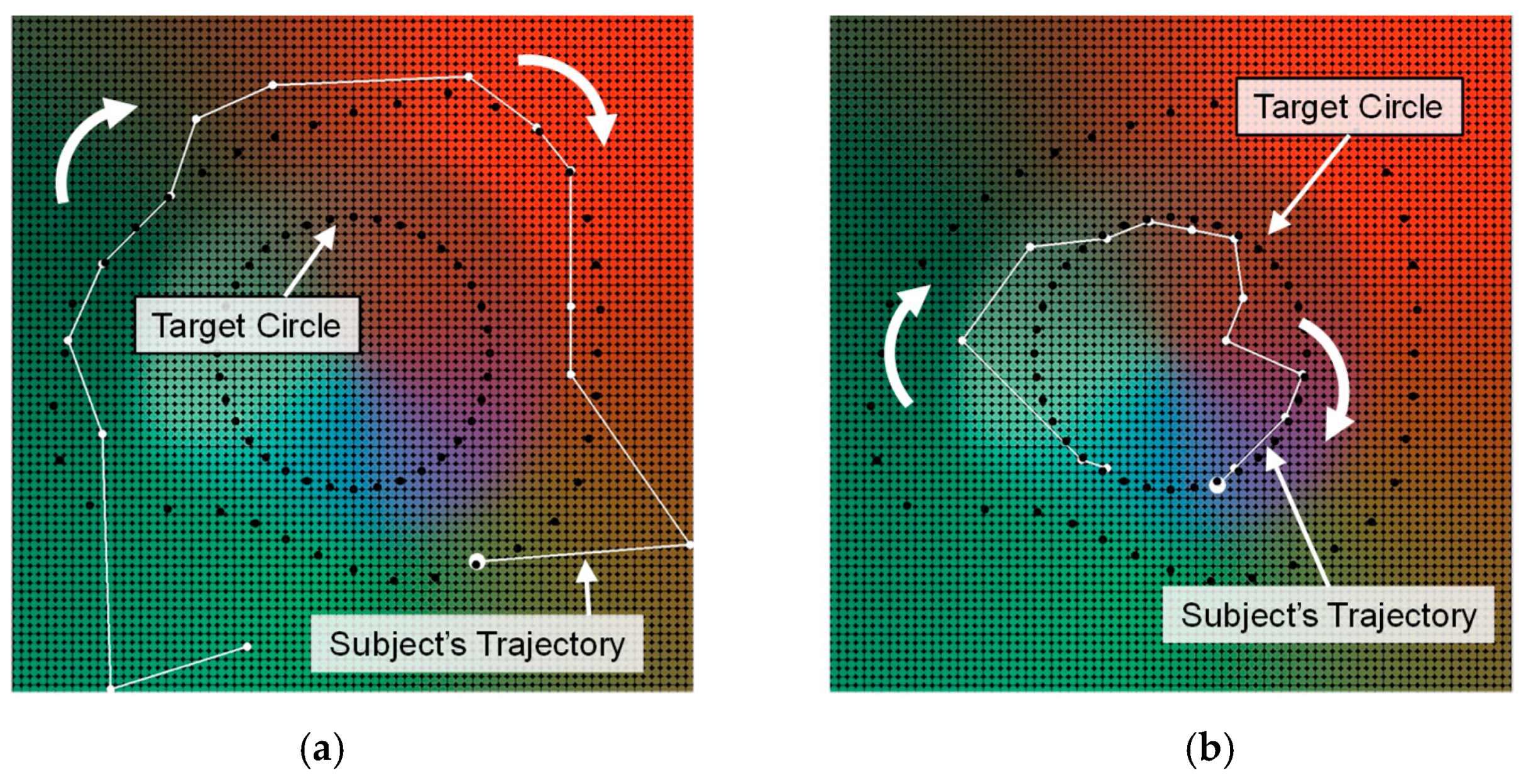
2.3. Constructing the Motor Skill Map
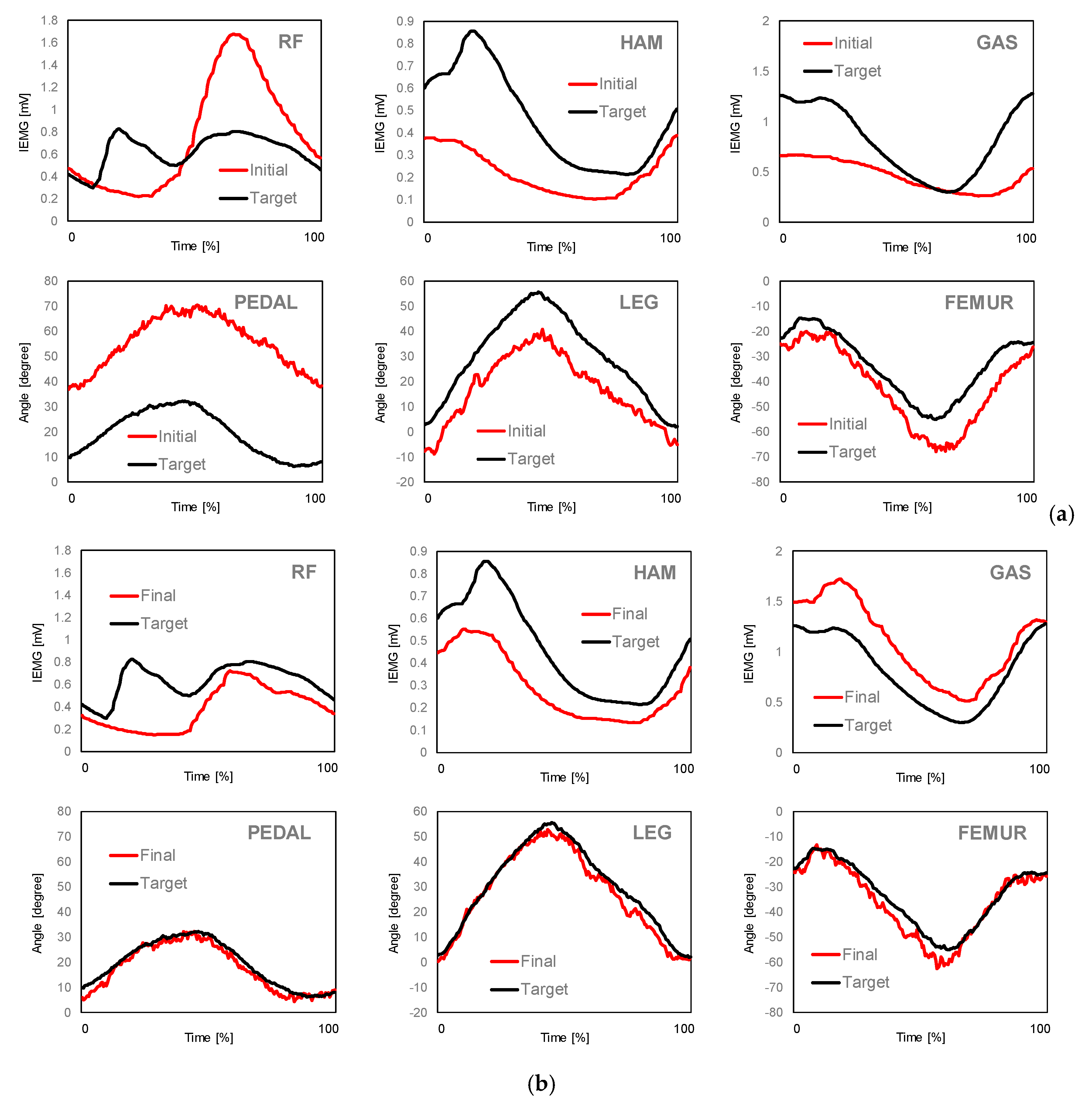
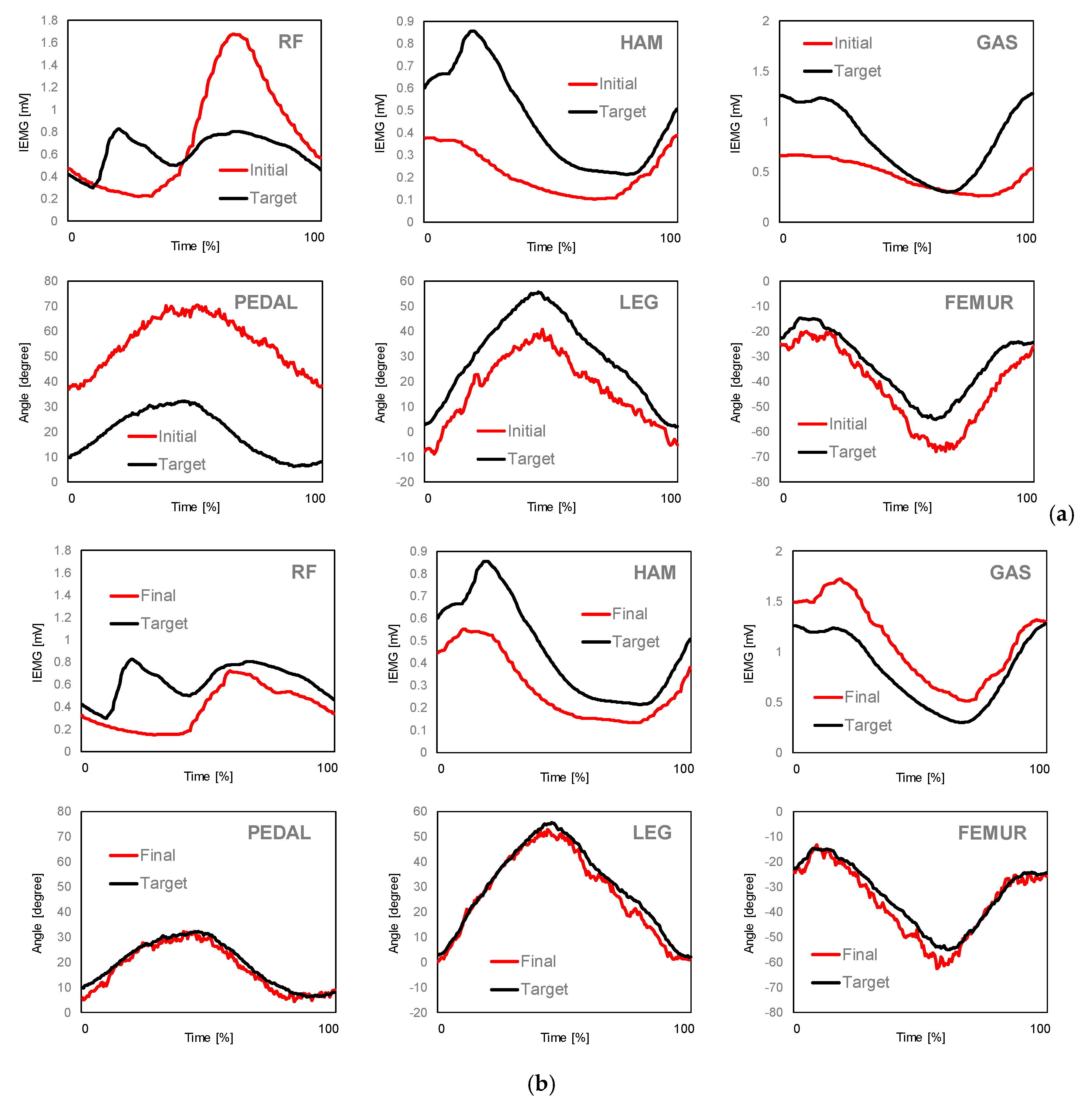
3. Results and Discussion
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Pino, E.J. Wearable EMG shirt for upper limb training. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2018, 4406–4409. [Google Scholar] [CrossRef]
- Yanai, K.; An, Q.; Ishikawa, Y.; Nakagawa, J.; Wen, W.; Yamakawa, H.; Yamashita, A.; Asama, H. Visualization of muscle activity during squat motion for skill education. In Serviceology for Designing the Future; Springer: Tokyo, Japan, 2016; pp. 205–215. [Google Scholar]
- Yokota, H.; Ohshima, S.; Mizuno, N. Information visualisation of optimised underhand throw for cybernetic training. Procedia Eng. 2015, 112, 534–539. [Google Scholar] [CrossRef]
- Yokota, H; Naito, M.; Mizuno, N.; Ohshima, S. Framework for visual-feedback training based on a modified self-organizing map to imitate complex motion. J. Sports Eng. Technol. 2019. [Google Scholar] [CrossRef]
- Kohonen, T. Self-organized formation of topologically correct feature maps. Biol. Cybernetics. 1982, 43, 59–69. [Google Scholar] [CrossRef]
- Kohonen, T. Self-Organizing Maps, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yokota, H.; Naito, M.; Mizuno, N.; Ohshima, S. Evaluation of a Framework for Visual-Feedback Training Based on a Modified Self-Organizing Map Using Sensing Information Including Muscle Activity. Proceedings 2020, 49, 40. https://doi.org/10.3390/proceedings2020049040
Yokota H, Naito M, Mizuno N, Ohshima S. Evaluation of a Framework for Visual-Feedback Training Based on a Modified Self-Organizing Map Using Sensing Information Including Muscle Activity. Proceedings. 2020; 49(1):40. https://doi.org/10.3390/proceedings2020049040
Chicago/Turabian StyleYokota, Hiroki, Munekazu Naito, Naoki Mizuno, and Shigemichi Ohshima. 2020. "Evaluation of a Framework for Visual-Feedback Training Based on a Modified Self-Organizing Map Using Sensing Information Including Muscle Activity" Proceedings 49, no. 1: 40. https://doi.org/10.3390/proceedings2020049040
APA StyleYokota, H., Naito, M., Mizuno, N., & Ohshima, S. (2020). Evaluation of a Framework for Visual-Feedback Training Based on a Modified Self-Organizing Map Using Sensing Information Including Muscle Activity. Proceedings, 49(1), 40. https://doi.org/10.3390/proceedings2020049040