Crack Detection Assisted by an Unmanned Aerial Vehicle for Wonjudaegyo Bridge in Korea †

 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
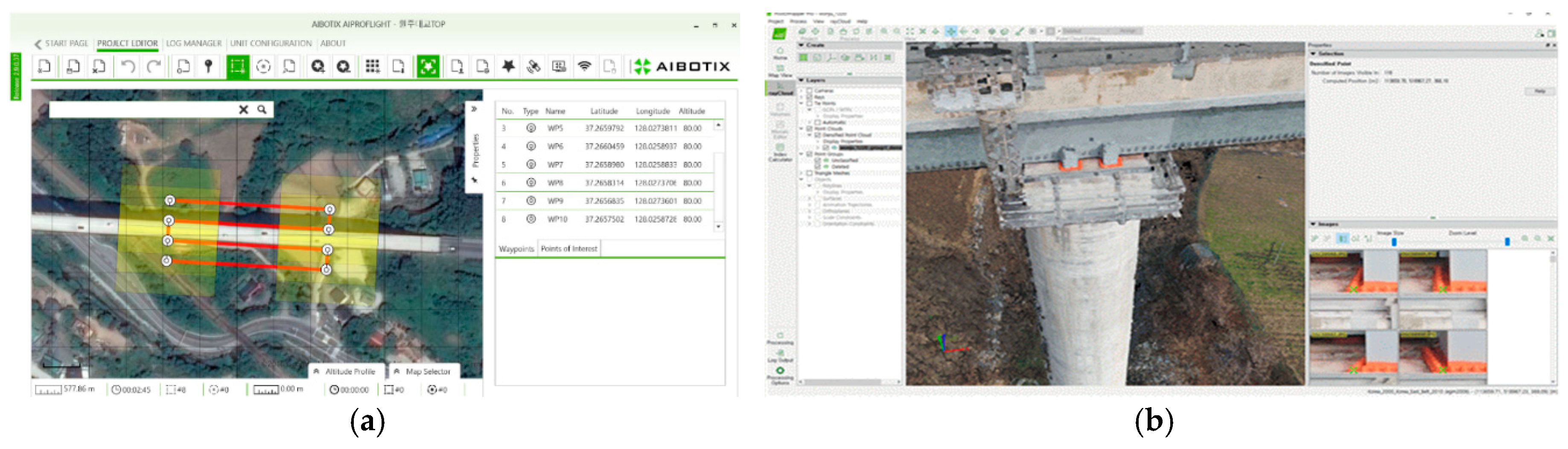
2.1. Case Study
2.2. UAV Used
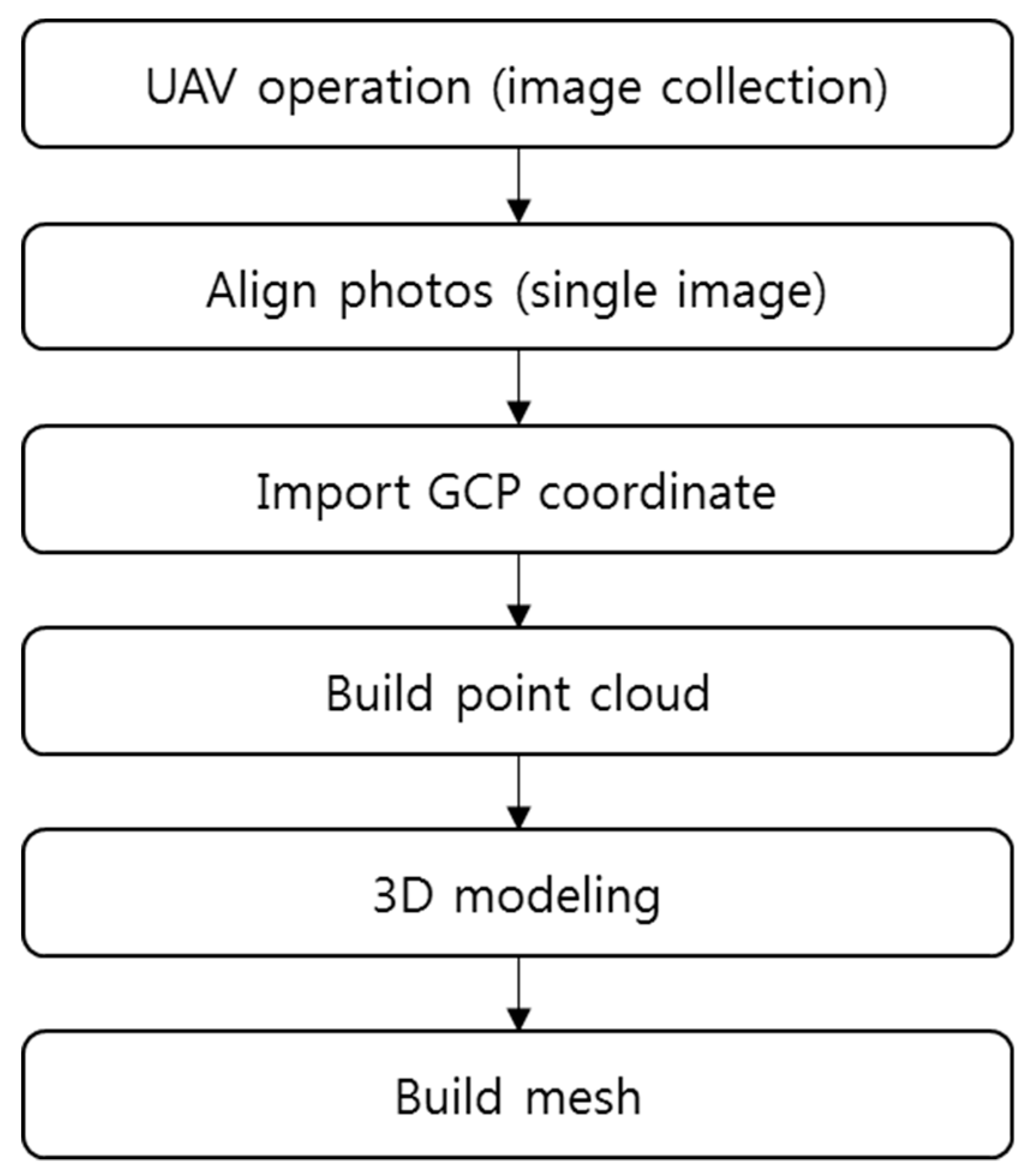
2.3. Methods
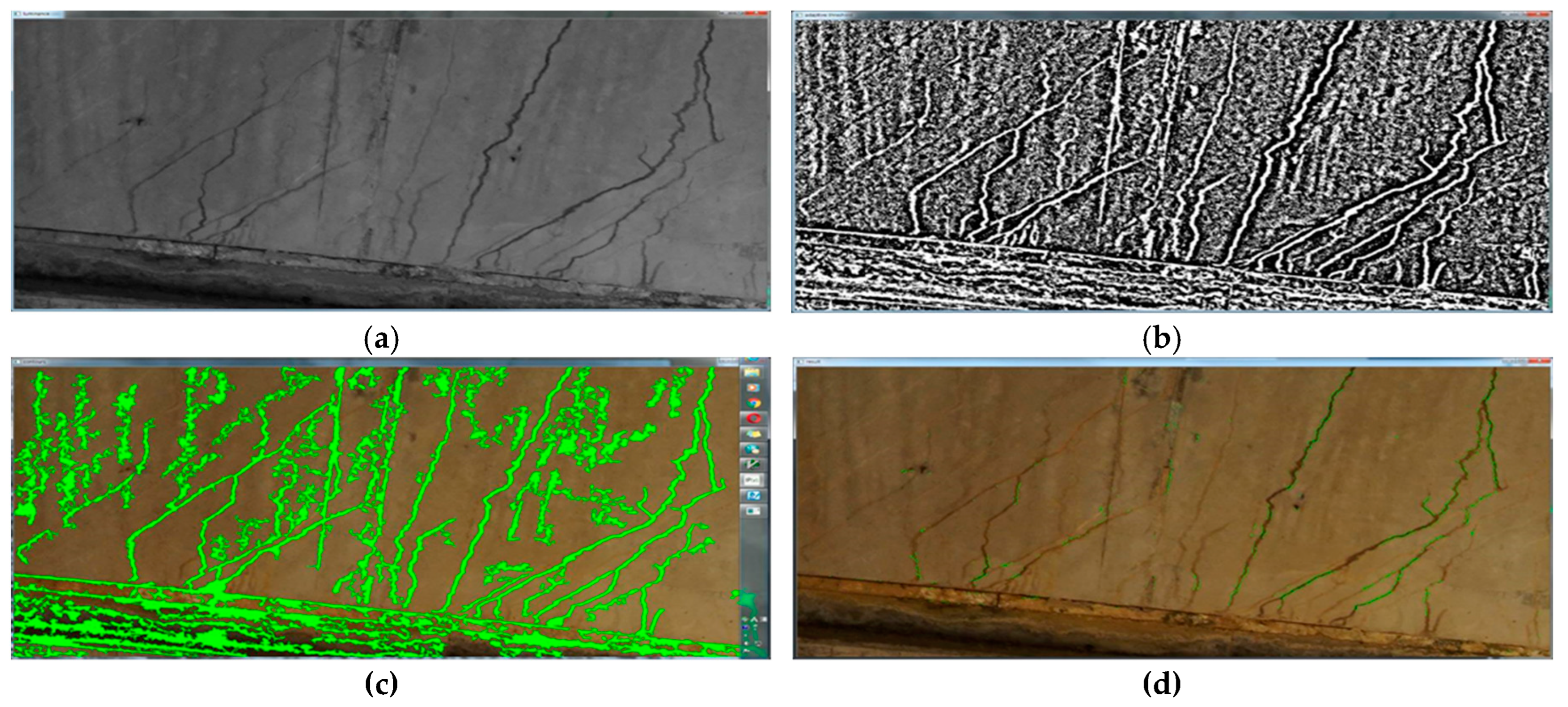
3. Result and Analysis
4. Conclusions
Conflicts of Interest
References
- Park, K.H.; Sun, J.W. Development of real-time bridge inspection application connected with bridge management system. J. Korea Acad. Ind. Coop. Soc. 2015, 16, 7893–7901. [Google Scholar] [CrossRef]
- Park, K.H.; Sun, J.W. Development of bridge life-cycle management system based on information and communication technology. J. Korea Acad. Ind. Coop. Soc. 2016, 17, 13–20. [Google Scholar] [CrossRef]
- Metni, N.; Hamel, T. A UAV for bridge inspection: visual servoring control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Oh, J.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Mohan, A.; Poobal, S. Crack detection using image processing: a critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Specifications | Descriptions | |
|---|---|---|---|
 Leica/Aibot | Body | Wing | Rotary wing |
| Length × width × height | 105 × 105 × 45 cm | ||
| Flight time | Approximately 25 min | ||
| Camera | Resolution | 24 MP | |
| Maximum image size | 6000 × 4000 | ||
| Takeoff/landing | Vertical | ||
| Gimbal | Three-axis | ||
| Weight | 3.4 kg | ||
| Photographing the substructure | Possible (with an on-top gimbal) | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.K.; Kim, M.J.; Kim, J.O.; Kim, J.S.; Acharya, T.D.; Lee, D.H. Crack Detection Assisted by an Unmanned Aerial Vehicle for Wonjudaegyo Bridge in Korea. Proceedings 2019, 4, 23. https://doi.org/10.3390/ecsa-5-05835
Lee JK, Kim MJ, Kim JO, Kim JS, Acharya TD, Lee DH. Crack Detection Assisted by an Unmanned Aerial Vehicle for Wonjudaegyo Bridge in Korea. Proceedings. 2019; 4(1):23. https://doi.org/10.3390/ecsa-5-05835
Chicago/Turabian StyleLee, Jae Kang, Min Jun Kim, Jung Ok Kim, Jin Soo Kim, Tri Dev Acharya, and Dong Ha Lee. 2019. "Crack Detection Assisted by an Unmanned Aerial Vehicle for Wonjudaegyo Bridge in Korea" Proceedings 4, no. 1: 23. https://doi.org/10.3390/ecsa-5-05835
APA StyleLee, J. K., Kim, M. J., Kim, J. O., Kim, J. S., Acharya, T. D., & Lee, D. H. (2019). Crack Detection Assisted by an Unmanned Aerial Vehicle for Wonjudaegyo Bridge in Korea. Proceedings, 4(1), 23. https://doi.org/10.3390/ecsa-5-05835