Relationship between Inspection Time and Frequency Components of Input and Reflected Thermal Waves in Active Thermographic Non-Destructive Inspection †

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experiments
2.1. Experimental Setup
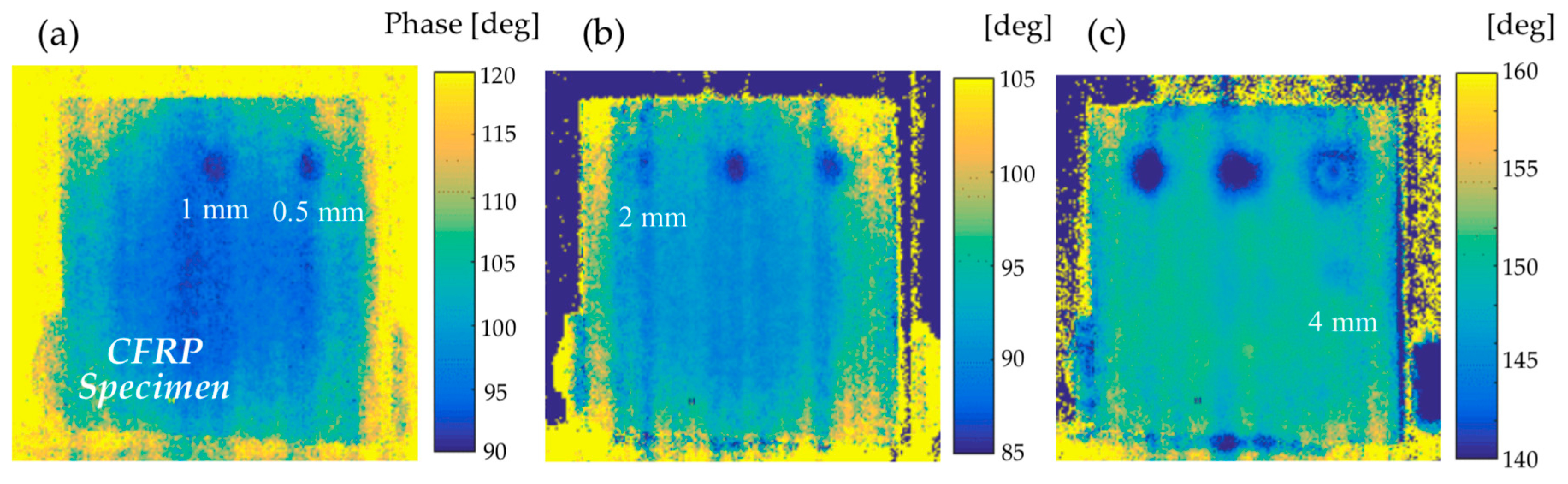
2.2. Experimental Results
3. Discussions with Numerical Studies
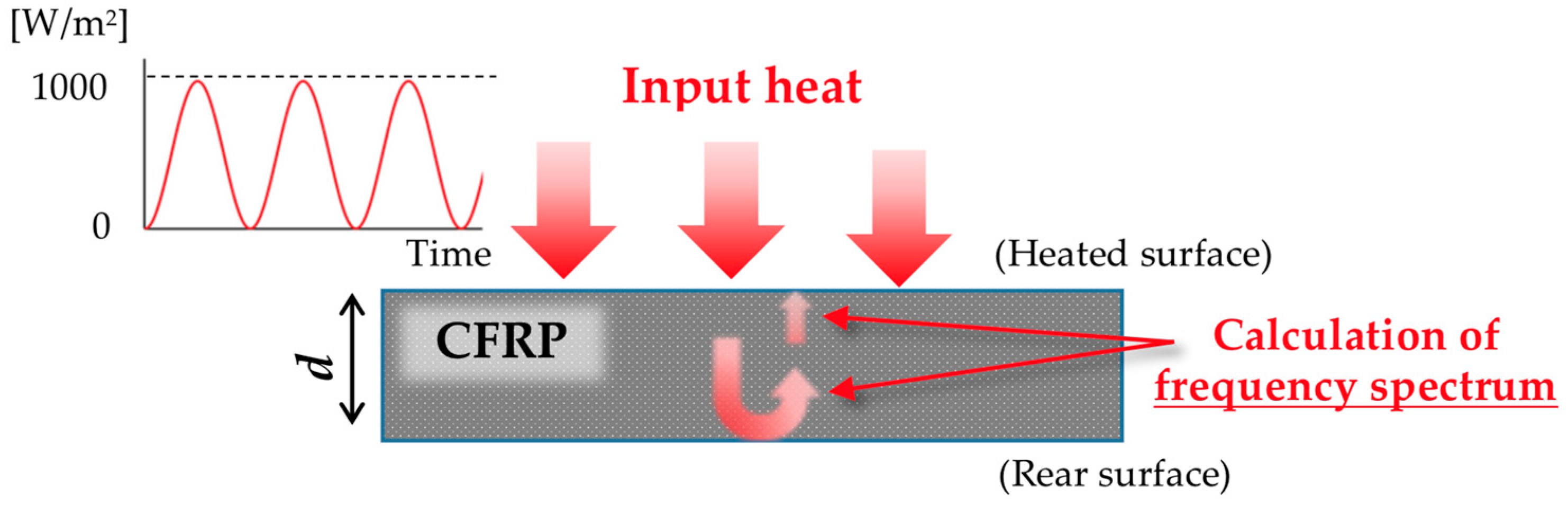
3.1. Numerical Calculations
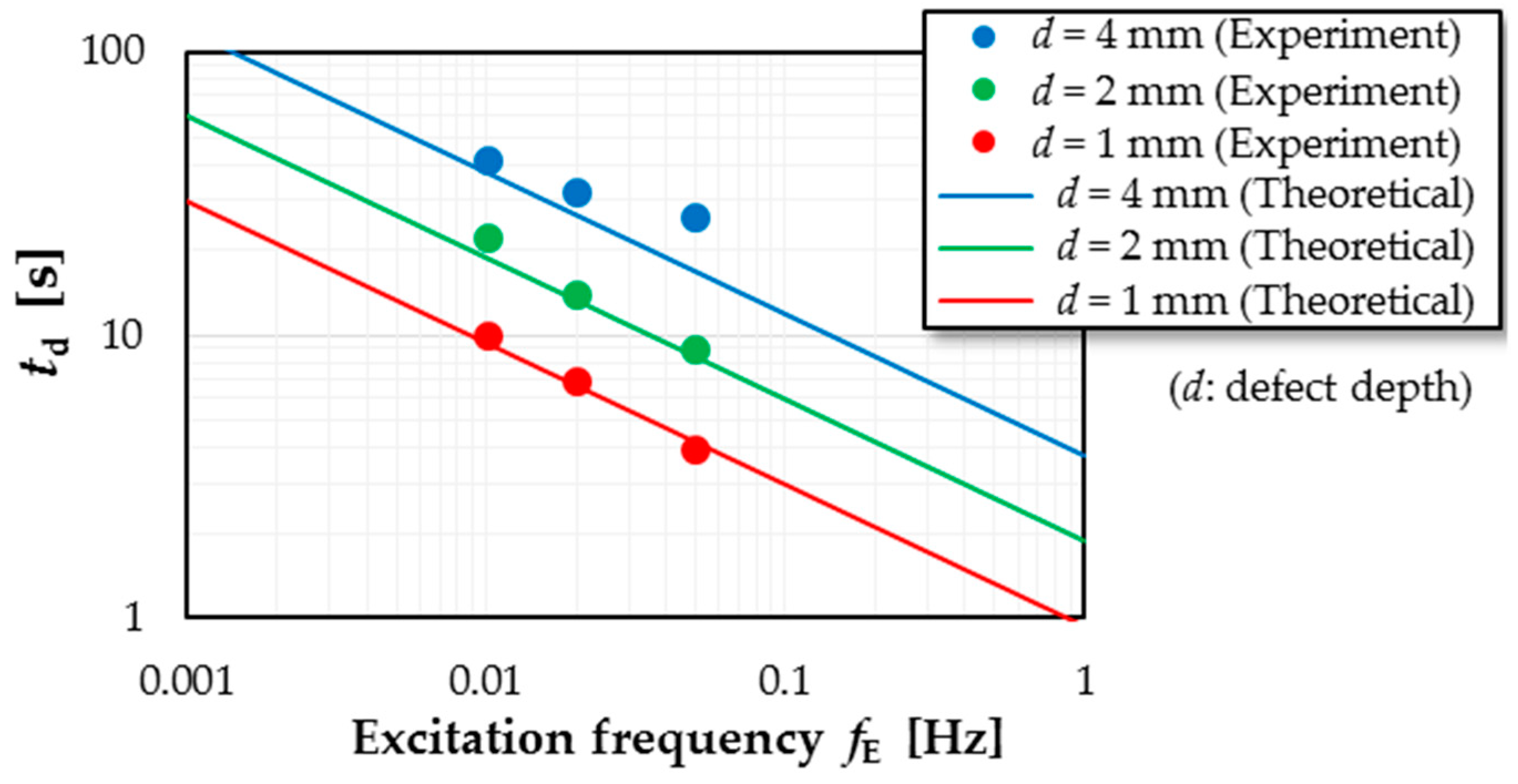
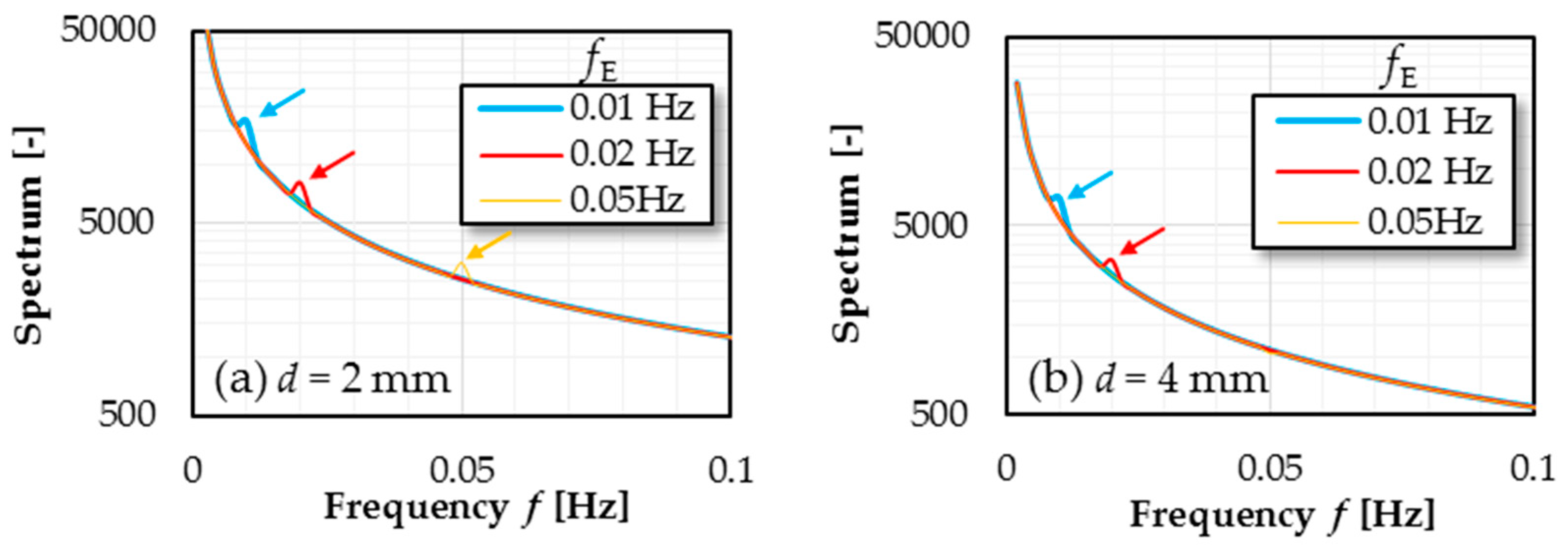
3.2. Numarical Results and Discussions
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Maldague, X. Theory and Practice of Infrared Technology for Nondestructive Testing, 1st ed.; John Wiley & Sons: New York, NY, USA, 2001; pp. 343–347. [Google Scholar]
- Maldague, X.; Marinetti, S. Pulse phase infrared thermography. J. Appl. Phys. 1996, 79, 2694–2698. [Google Scholar] [CrossRef]
- Maldague, X.; Galmiche, F.; Ziadi, A. Advances in pulsed phase thermography. Infrared Phys. Technol. 2002, 43, 175–181. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishikawa, M.; Ishihara, S.; Nishino, H.; Koyama, M.; Kasano, H.; Hatta, H.; Utsunomiya, S. Relationship between Inspection Time and Frequency Components of Input and Reflected Thermal Waves in Active Thermographic Non-Destructive Inspection. Proceedings 2019, 27, 16. https://doi.org/10.3390/proceedings2019027016
Ishikawa M, Ishihara S, Nishino H, Koyama M, Kasano H, Hatta H, Utsunomiya S. Relationship between Inspection Time and Frequency Components of Input and Reflected Thermal Waves in Active Thermographic Non-Destructive Inspection. Proceedings. 2019; 27(1):16. https://doi.org/10.3390/proceedings2019027016
Chicago/Turabian StyleIshikawa, Masashi, Sou Ishihara, Hideo Nishino, Masashi Koyama, Hideyuki Kasano, Hiroshi Hatta, and Shin Utsunomiya. 2019. "Relationship between Inspection Time and Frequency Components of Input and Reflected Thermal Waves in Active Thermographic Non-Destructive Inspection" Proceedings 27, no. 1: 16. https://doi.org/10.3390/proceedings2019027016
APA StyleIshikawa, M., Ishihara, S., Nishino, H., Koyama, M., Kasano, H., Hatta, H., & Utsunomiya, S. (2019). Relationship between Inspection Time and Frequency Components of Input and Reflected Thermal Waves in Active Thermographic Non-Destructive Inspection. Proceedings, 27(1), 16. https://doi.org/10.3390/proceedings2019027016