1. Introduction
The maintenance and repair of large concrete infrastructure is rather costly, e.g., in Europe, €4–6 billion are spent annually on maintenance of concrete infrastructure [
1], let alone the associated costs that derive from traffic disruptions. It is reasonable to assume that the number of required inspections is expected to increase in the next few decades as concrete structures from the 60’s and 70’s are presumably exceeding their expected service life.
Solutions to monitor structures usually consists in embedded sensors to detect structural stiffness changes or corrosion initiation, e.g., vibrating wires [
2] and optical fibres [
3], to mention a few. The results from these are then associated with the presence of damages in concrete. However, such monitoring systems are common to modern infrastructure with long service life, i.e., much of the existing ageing concrete structures ought to be inspected in the traditional way, i.e., visual inspection followed by non-destructive testing.
The presence of cracks in concrete has a major impact on the durability of reinforced concrete since they represent an easy path to aggressive agents to reach the reinforcement and trigger the onset of corrosion. Thus, the detection of cracks is a key aspect in the damage assessment. The earlier a crack is detected, the better the chance to counter the side effects that derive from them. When performing damage assessment of infrastructures, a visual inspection provides an easy mean to detect damages, especially concrete cracks since they are apparent. However, for large infrastructures, visual inspections are rather time consuming and difficult, let alone the safety aspects when dealing with areas that are hard to reach, e.g., the lower part of slab decks in bridges [
4]. To facilitate that, several companies are making use of unmanned aerial vehicles (UAV) for visual inspection of structures; especially because the UAV industry is providing reliable, easy to use, and affordable UAV that can help inspectors to improve their efficiency.
Although commercial UAV are becoming easier to operate, it does not necessarily translate to an easier damage assessment workflow, i.e., from data collection to assessment. The biggest challenge relies on the latter, since UAV enables the collection of a larger dataset (at least a few orders to magnitude higher) than that from traditional visual inspection using cameras. Extracting meaningful insights from such extensive amount of data can be time consuming and cumbersome, so the time saved to collect data from a structure can easily be spent on data analysis. Hence, the provision of new paradigms for the assessment of concrete structures, e.g., to automatically identify concrete cracks, is a step towards improving UAV-based inspection workflow, thus providing a safer, low cost, and more objective analysis.
Though the development of automated crack detection system is not entirely new, with a few deployments on UAV [
5,
6], but it still represents a challenging task that has been explored over the last decades. Most of the development relies on a combination or improvement of conventional digital image processing techniques such as thresholding, mathematical morphology, and edge detection, while utilising photometric (e.g., pixel value) and geometric assumptions (e.g., continuity and local orientation) about properties of crack images to detect cracks—an extensive review can be found in [
7]. While reliable in some applications, these methods are based on shallow abstractions (as in traditional rule-based artificial intelligent systems) with limited learning capabilities. Thus, they do not encompass the complexity of conditions that a concrete surface might exhibit, e.g., different light, surface finish, roughness, etc. In fact, such complexity makes it virtually impossible to hard code a rule-based method that is capable to account for all features in concrete surfaces.
Deep learning algorithms, such as Convolutional Neural Networks (CNN), offer means to overcome the existing limitations in crack detection using image processing. Specifically, CNN have successfully been applied to image classification, while featuring a great level of abstraction (generalisation) and learning capabilities, a few examples can be found in [
8]. These features are key to detect damages such as cracks in concrete in a robust and reliable manner; modern CNN-based automatic crack detection system under development for pavements are a proof to that [
9].
With this vision in mind, we focus on developing a CNN-based model to detect damages on concrete surfaces, thus providing new paradigms for the assessment of structures. At present, the developed system is limited to detecting concrete cracks using a binary classification method, i.e., the system identifies whether or not a crack is present on the concrete surface. The reference image dataset for development has 3500 images of concrete surfaces.
The basis for CNN development relies on transfer-learning, i.e., we build upon a pre-trained open-source model VGG16 and use an experimental study to evaluate the influence of training parameters such as learning rate, number of neurons (or nodes) in the last fully connected layer, and training dataset size on the accuracy of the classification model. The obtained results provide an insight for researchers working with machine learning-based algorithms for crack detection, while the developed model represents the first-generation concrete crack detection tool that can be scaled to more complex models, including multi-label classification.
2. Experimental Program
The experimental program comprises four phases: (1) create a reference classified image dataset; (2) establish the reference artificial intelligent system; (3) implement transfer-learning approach; and (4) run the training experiments. The details on each phase are presented as follows.
2.1. Image Dataset
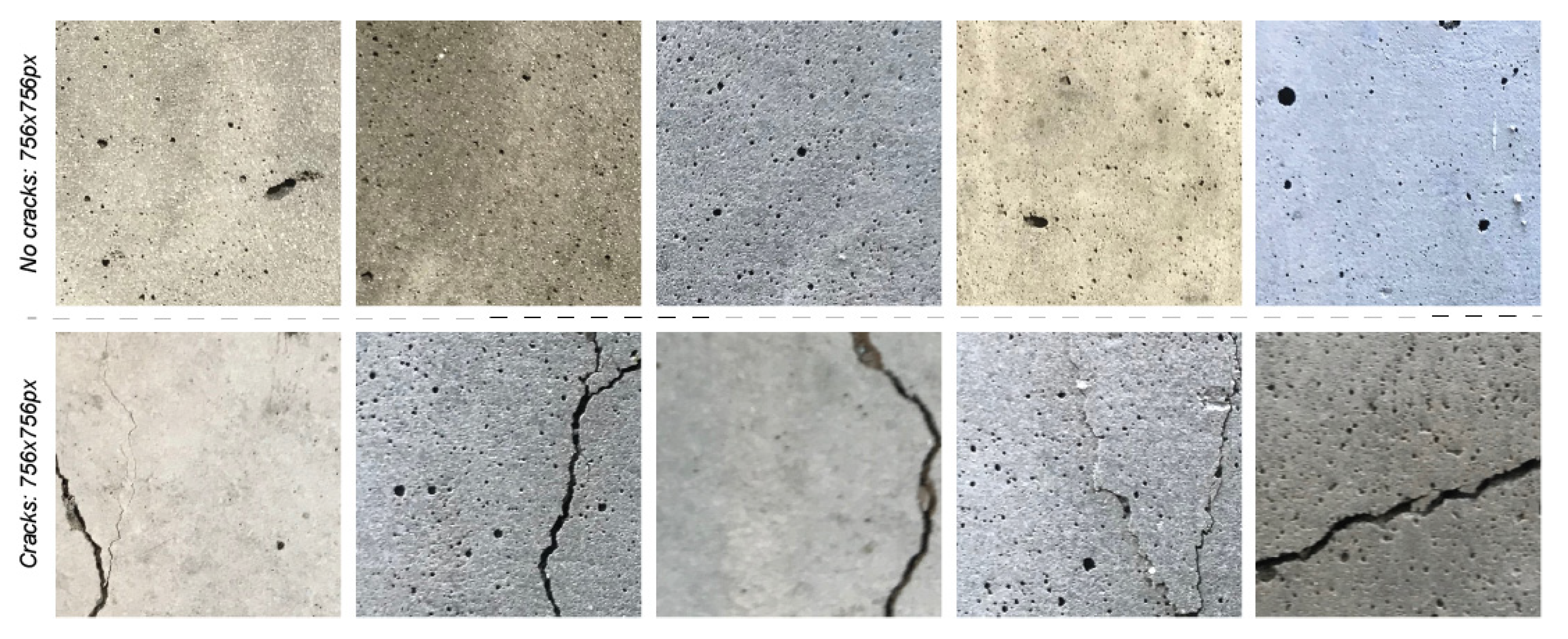
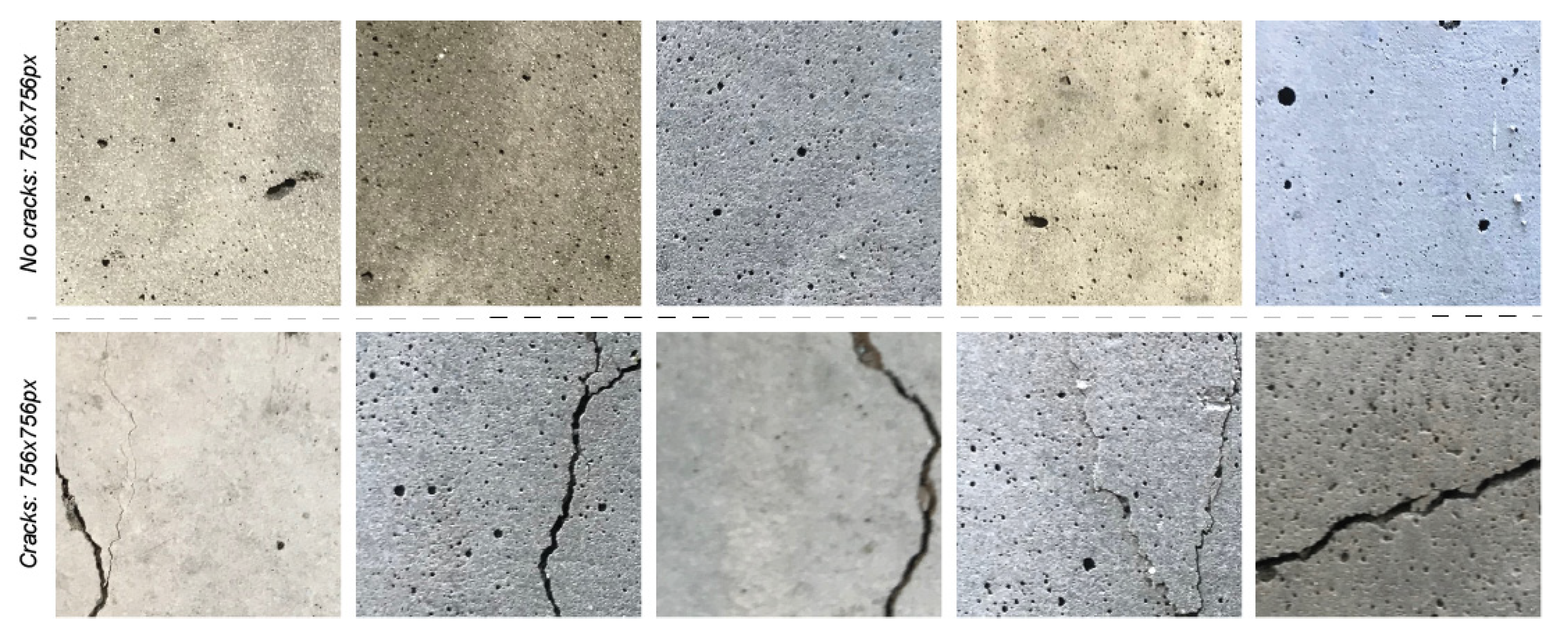
The dataset comprised 851 pictures with size of 756 × 756 pixels. These pictures were taken from various concrete specimens after mechanical testing at the Concrete Centre at the Danish Technological Institute. The main idea was to collect images of concrete services at different surface appearance to increase the diversity of the dataset and, consequently, of the AI system that learns from this dataset.
To augment the dataset without compromising the resolution, the pictures were sliced into images of 256 × 256 pixels—composing a final dataset with 3500 samples, which were then manually classified in two categories: concrete surfaces with and without cracks. The classified dataset is composed of 2336 and 1164 images with and without cracks, respectively. Examples are shown in
Figure 1. The dataset is divided into a training and validation dataset at an 80/20 ratio.
2.2. Network Implementation
As the reference dataset described in
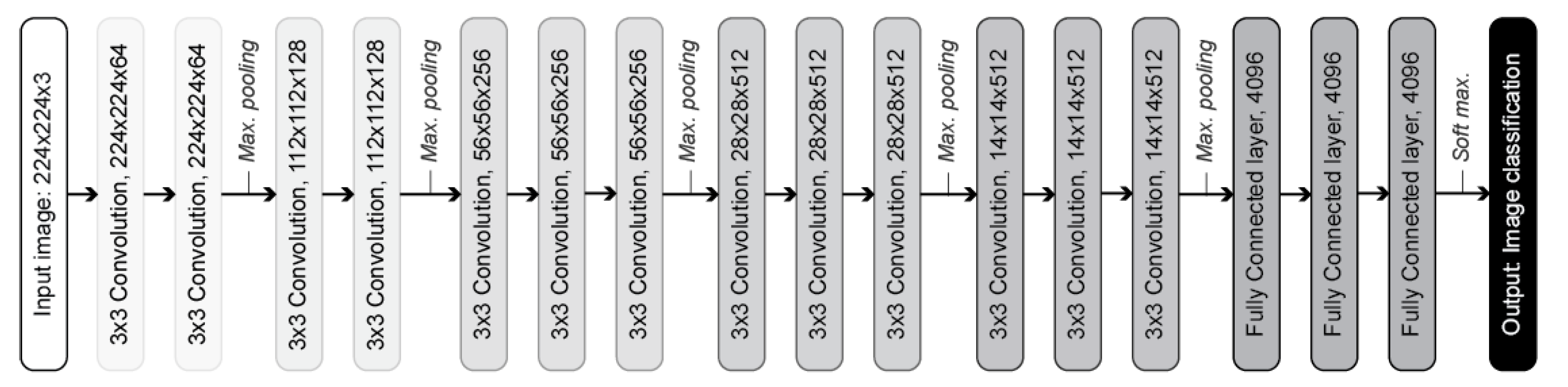
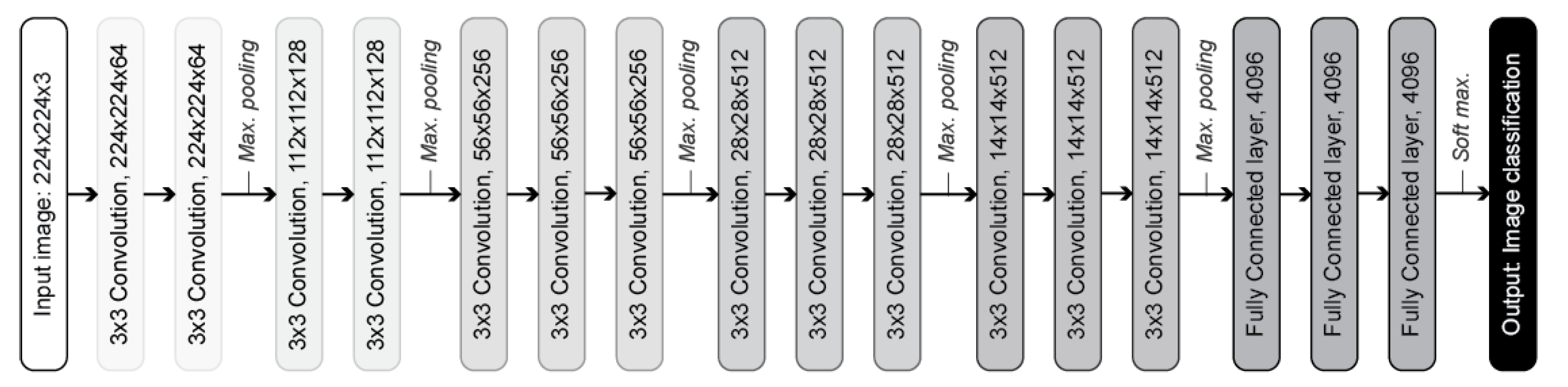
Section 2.1 is relatively small to enable a robust training of a complete deep learning model, a transfer-learning methodology was applied. Specifically, an open-source model, namely VGG16 [
10], was used as basis for the development of the concrete crack identification model. The VGG16 is a CNN with a total of 16 layers, with 13 convolution layers and 3 fully connected layers, as shown in
Figure 2. This model was proposed in the ImageNet Large Scale Visual Recognition Challenge in 2014, and it was trained on the ImageNet Dataset that consists of millions of images divided into thousands of categories (none of which is related to concrete cracks).
In our work, the training experiments were carried out using Google Cloud’s Computer environment. In this environment, a virtual machine with 8 vCPUs Intel Broadwell, 30GB memory, and 1× NVIDIA Tesla K80 was setup, allowing experimental runs with various values of learning rate, number of nodes, and training sample-size as described in the
Section 2.3.
2.3. Training Experiments
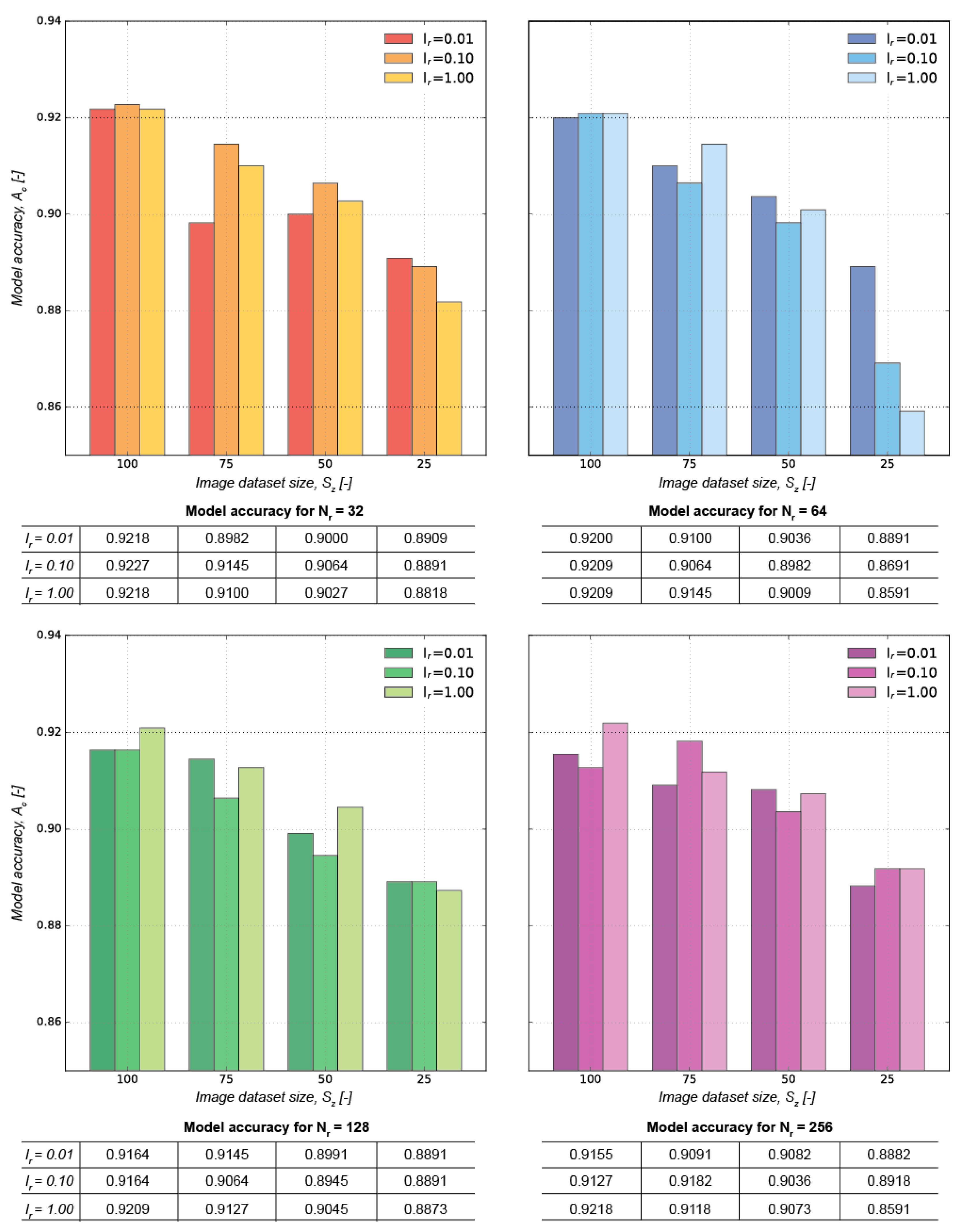
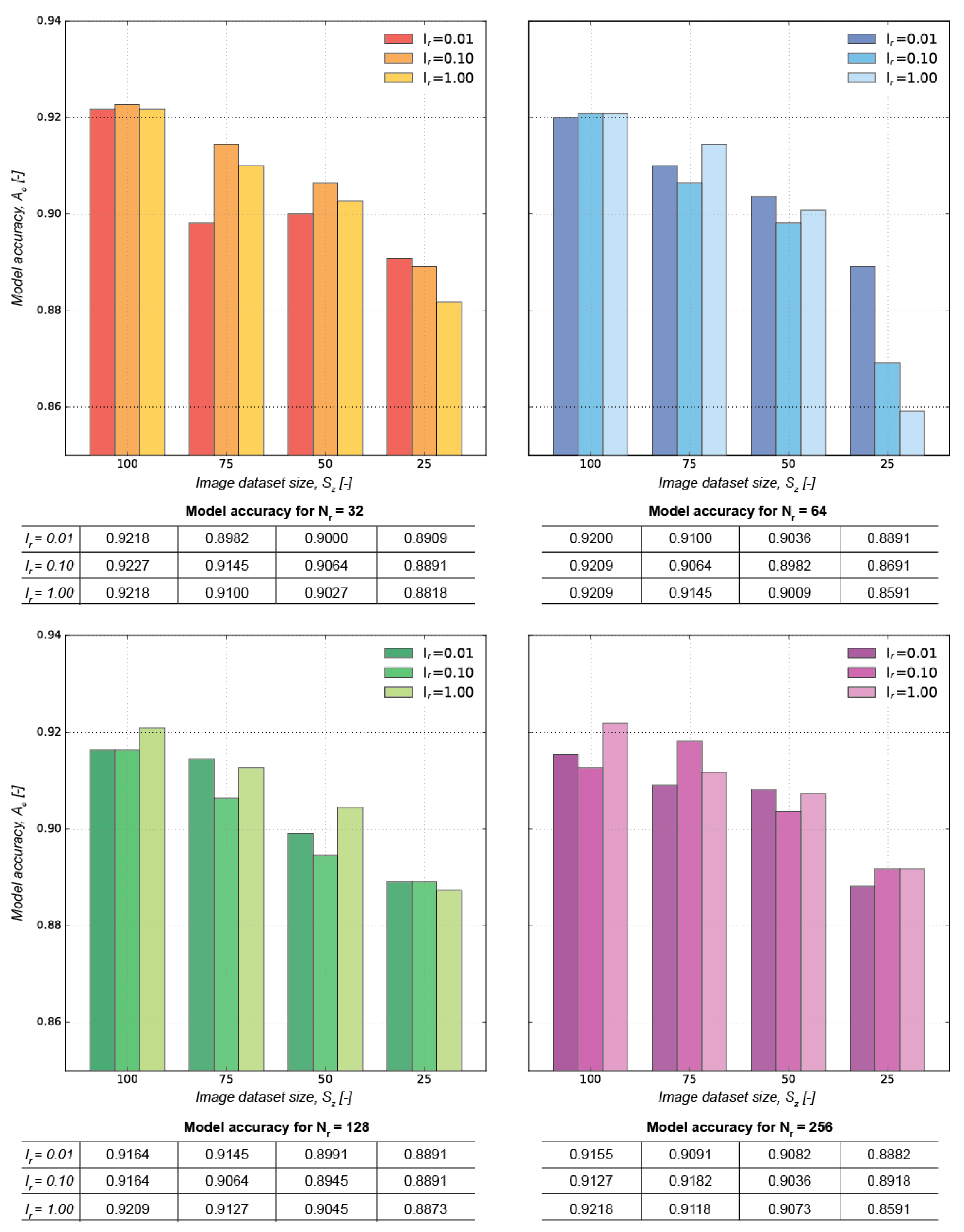
The training experiments correspond to a factorial study of three variables, namely learning rate (lr), number of nodes in the fully connected layer (Nd) and training image dataset size (Sz). Specifically, the ranges selected for each variable are lr = [0.01, 0.10, 1.00]; Nd = [32, 64, 128, 256] and Sz = [25%, 50%, 75%, 100%] of the original image dataset. As such, the training experiment of the crack detection network comprises size of lr × size of Nd × size of Sz = 48 experiments. For each experiment, the value of accuracy (Ac) in each epoch was recorded and used to identify the best model.
It is important to bear in mind that a global optimisation of the parameters from the crack detection model is beyond the scope of this publication. Our primary focus is to showcase the potential of using deep learning with transfer-learning for the development of a crack detection model and identifying the effects of model parameters. Hence, each training experiment was performed only once, and the standard deviation of the results was not computed.
3. Results and Discussion
The results for each experiment are listed in
Figure 3, which indicates that a model with l
r = 0.10, N
d = 32, and S
z = 100% yields an accuracy of 92.27%, i.e., the best result encountered in our study.
Figure 3 highlights that the image dataset size (S
z) has the strongest influence of the accuracy of the model. Such trend is expected since a larger dataset enables a greater number of iterations, contributing to a more accurate output. Also, the ascending trend when moving from S
z = 25% to 100% in
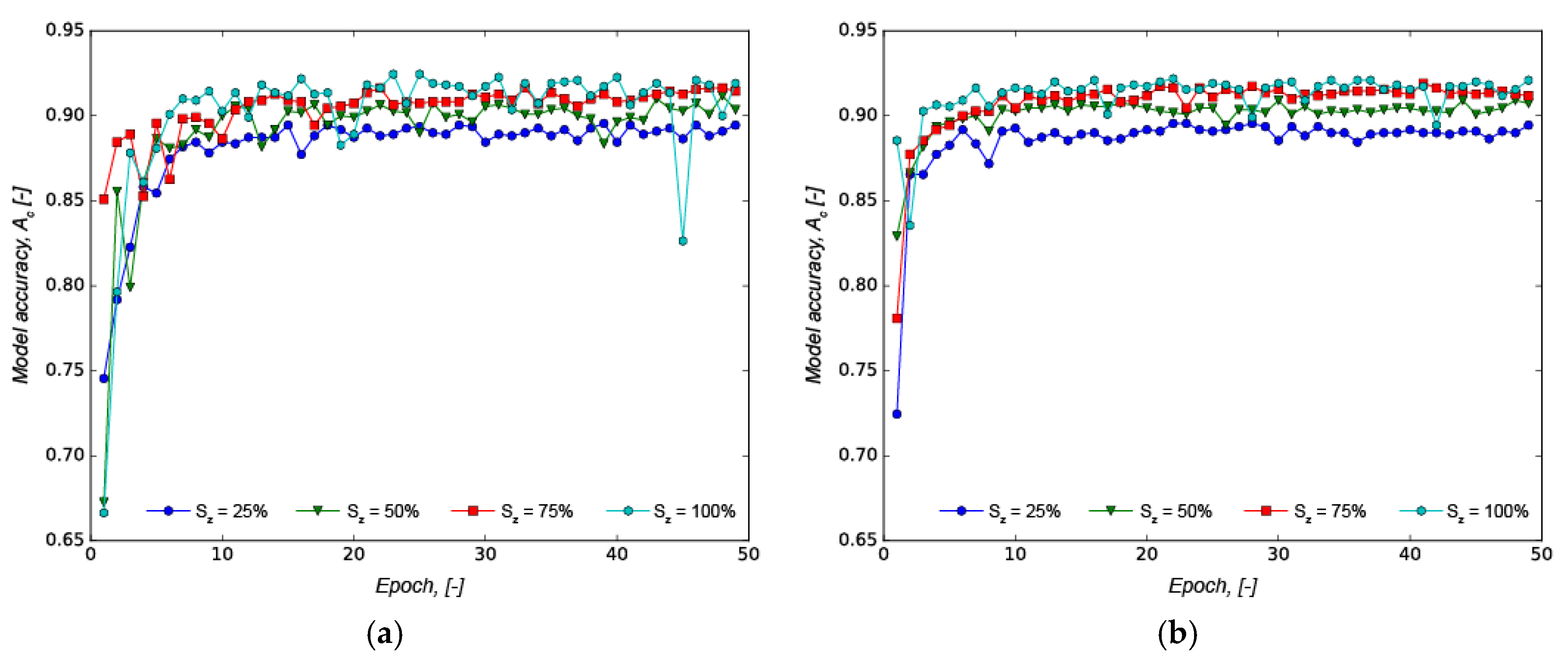
Figure 3 suggests that an even larger training dataset has the potential to improve the network accuracy further, as there is steady increase in accuracy with no indication of convergence to a maximum accuracy. The evolution of the model’s accuracy in each epoch for models with l
r = 0.10, N
r = [32, 256] and S
z = [25%, 50%, 75%, 100%] is depicted in
Figure 4.
Differently from the image dataset size, the effect of N
r and l
r is rather neglectable. Such results are likely because the fully connected layer—i.e., the last layer of the network—relies on binary cross entropy, which is a relatively simple classification approach that can be computed with less complex networks. Furthermore, smaller N
r requires fewer parameters and, therefore, enables a likely faster optimal convergence of the network. Hence, even with N
r = 32 nodes, the neural network yielded great accuracy when compared to more complex models. Notice that a further reduction of N
r < 32 is likely to yield a model with prediction accuracy at the same level as the ones listed in
Figure 3.
The validation of the abovementioned assumption and the development of a comprehensive parametric study focused on optimising the network variables is currently under investigation and will be published elsewhere. Another aspect for a complementary study relates to the recognition of cracks at the pixel level to enable the creation of a map of cracks and computing the crack width on an evaluated surface. At present, our model is only capable of finding patch level cracks, e.g., for large images that are split into several blocks of 256 × 256 pixels, without considering the pixel level.
Finally, our efforts towards developing a machine learning-based crack identification system have a goal to automate the damage assessment workflow of inspectors dealing with large infrastructure—increasing their productivity when the model is combined with UAV system. The results listed in this article are a step towards that. Notice, however, that while a fully-automated inspection seems far-fetched in a short-term scenario—especially because a much greater dataset of images comprising several damage types and a more complex network is required—the utilisation of machine learning-based tools to assist experts in concrete damage assessment tasks is likely to have a greater chance of success. The future of building and infrastructure inspection workflow envisioned by the authors is depicted in
Figure 5.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}