A Robust Test-Based Modal Model Identification Method for Challenging Industrial Cases †

Abstract
:1. Introduction
2. MLMM Modal Parameter Estimation Method
2.1. MLMM: Basic Background
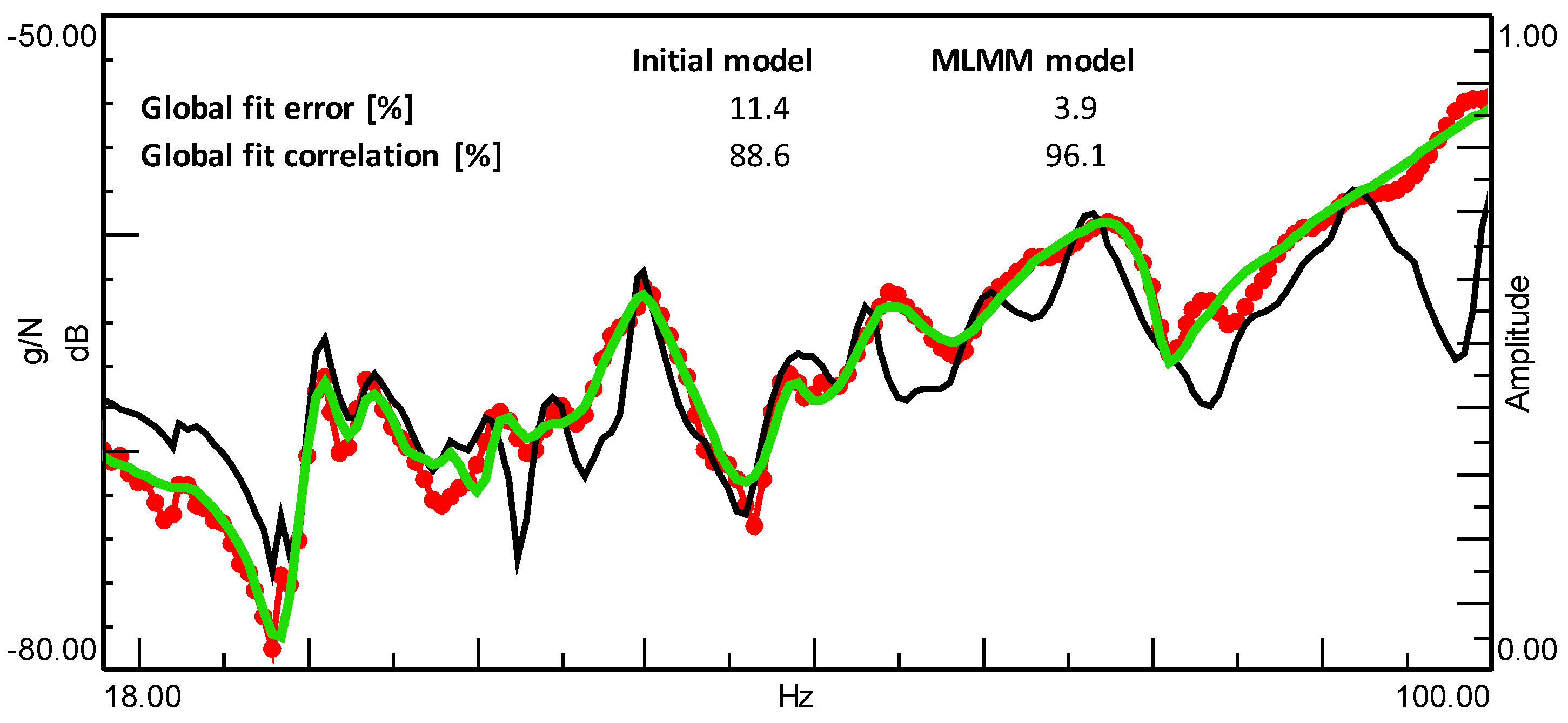
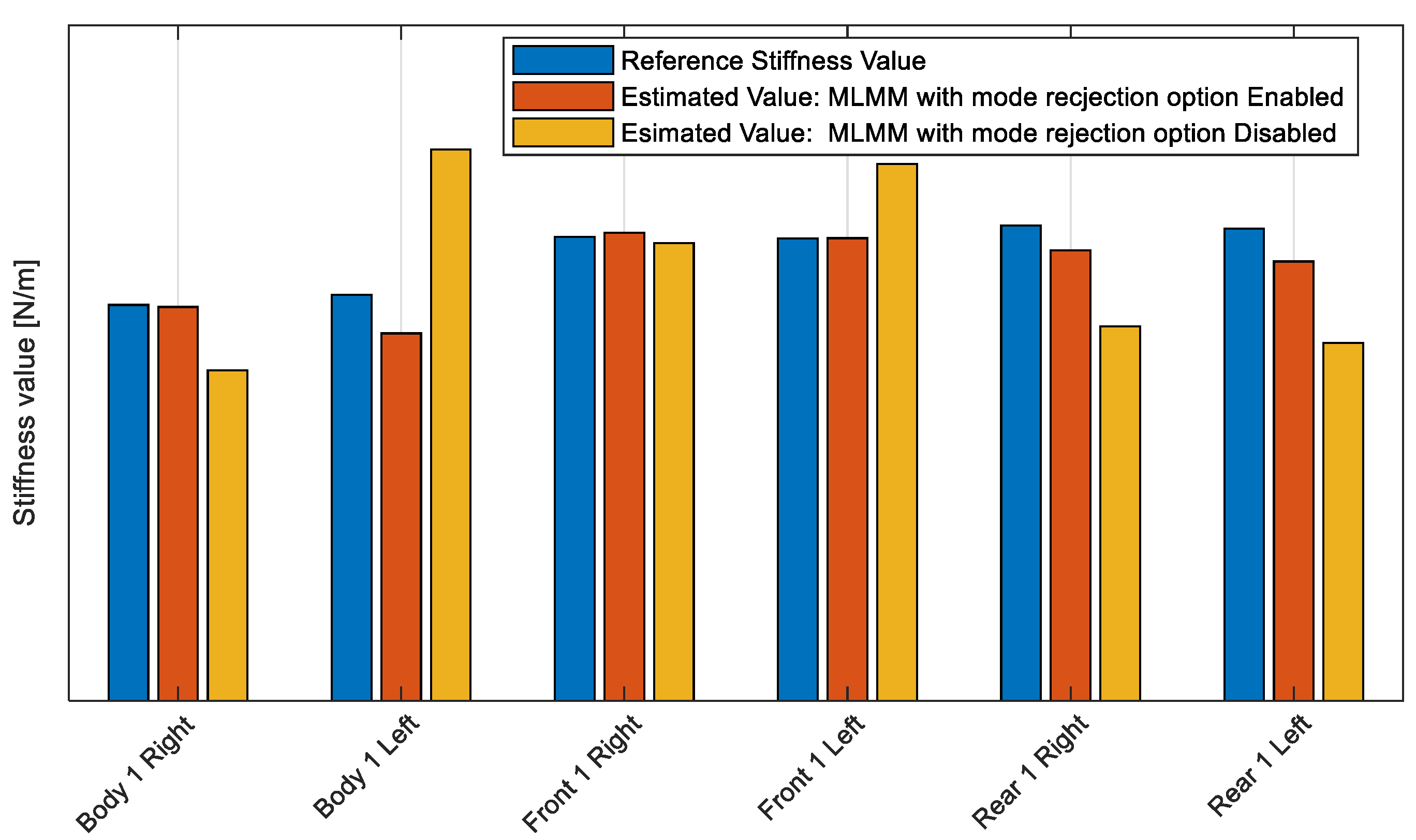
2.2. MLMM: A New Feature
3. Applications
3.1. Application of MLMM Method to Trimmed Car Body Structural Data Set
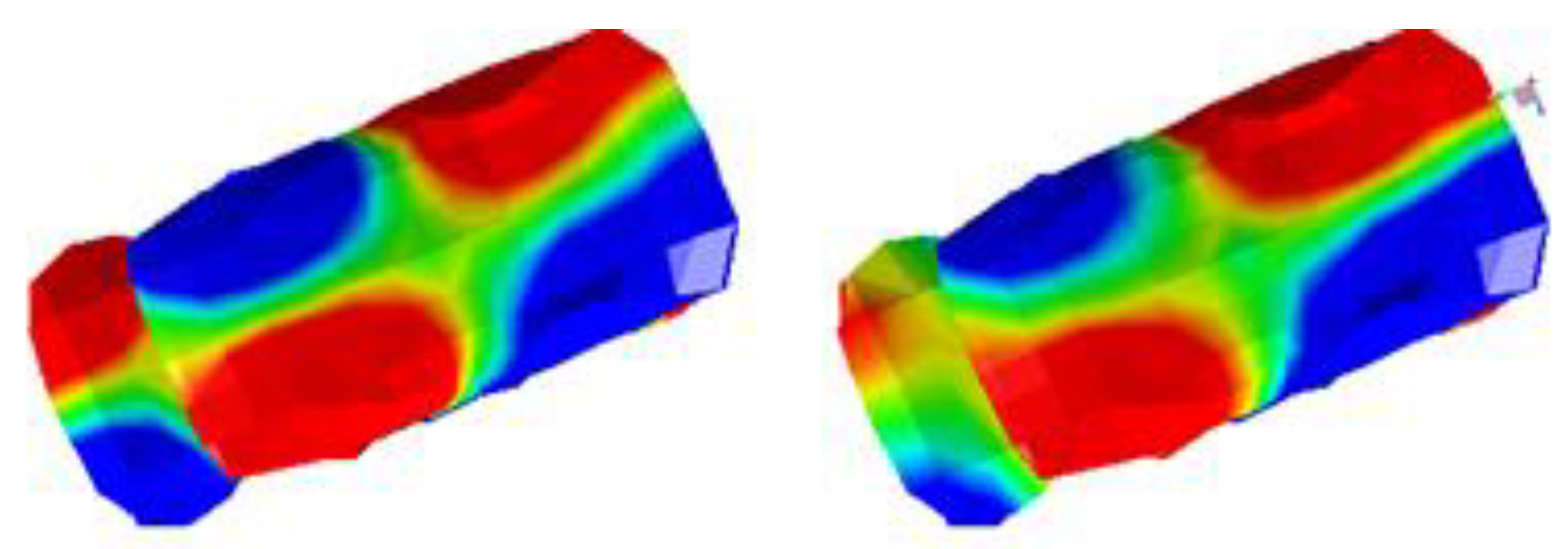
3.2. Application of the MLMM Method in the Field of Acoustic Modal Analysis (AMA) of a Car Cavity
4. Conclusions
Author Contributions
References
- El-Kafafy, M.; De Troyer, T.; Peeters, B.; Guillaume, P. Fast Maximum-Likelihood Identification of Modal Parameters with Uncertainty Intervals: A Modal Model-Based Formulation. Mech. Syst. Signal Process. 2013, 37, 422–439. [Google Scholar] [CrossRef]
- El-kafafy, M.; Accardo, G.; Peeters, B.; Janssens, K.; De Troyer, T.; Guillaume, P. A Fast Maximum Likelihood-Based Estimation of a Modal Model. In Topics in Modal Analysis; Mains, M., Ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Volume 10, pp. 133–156. [Google Scholar]
- El-Kafafy, M.; Peeters, B.; Guillaume, P.; De Troyer, T. Constrained Maximum Likelihood Modal Parameter Identification Applied to Structural Dynamics. Mech. Syst. Signal Process. 2016, 72–73, 567–589. [Google Scholar] [CrossRef]
- Guillaume, P.; Verboven, P.; Vanlanduit, S. Van der Auweraer, H. In Peeters, B. A poly-reference implementation of the least-squares complex frequency domain-estimator. In Proceedings of the 21th International Modal Analysis Conference (IMAC), Kissimmee, FL, USA, 3–6 February 2003. [Google Scholar]
- Siemens PLM (LMS International). LMS Test.Lab. Available online: www.plm.automation.siemens.com (accessed on 1 March 2018).
- Heylen, W.; Lammens, S.; Sas, P. Modal Analysis Theory and Testing; Katholieke Universiteit Leuven: Heverlee, Belgium, 1997. [Google Scholar]
- Accardo, G.; El-kafafy, M.; Peeters, B.; Bianciardi, F.; Brandolisio, D.; Janssens, K.; Martarelli, M. Experimental Acoustic Modal Analysis of an Automotive Cabin. In Experimental Techniques, Rotating Machinery, and Acoustics; de Clerck, J., Ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Volume 8, pp. 33–58. [Google Scholar]
- Peeters, B.; El-Kafafy, M.; Accardo, G.; Knechten, T.; Janssens, K.; Lau, J.; Gielen, L. Automotive cabin characterization by acoustic modal analysis. In Proceedings of the JSAE Annual Congress, Sendai, Japan, 22–24 October 2014. [Google Scholar]
- Yoshimura, T.; Saito, M.; Maruyama, S.; Iba, S. Modal analysis of automotive cabin by multiple acoustic excitation. In Proceedings of the ISMA2012-USD2012, Leuven, Belgium, 17–19 September 2012. [Google Scholar]
- Hwang, K.H.; Choi, S.C.; Van Genechten, B.; Jeon, J.H.; Brechlin, E. Acoustic finite element model validation of vehicle interior cabin from acoustic mode and transfer function. In Proceedings of the NAFEMS World Congress, San Diego, CA, USA, 21–24 June 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polymax | MLMM | |||
|---|---|---|---|---|
| Mean Value | Real | Complex | Real | Complex |
| Fitting Error [%] | 27.7 | 20.9 | 9.6 | 5.6 |
| Fitting Correlation [%] | 79.3 | 84.6 | 92.1 | 95.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoud, E.-K.; Bart, P.; Theo, G.; Patrick, G. A Robust Test-Based Modal Model Identification Method for Challenging Industrial Cases. Proceedings 2018, 2, 378. https://doi.org/10.3390/ICEM18-05196
Mahmoud E-K, Bart P, Theo G, Patrick G. A Robust Test-Based Modal Model Identification Method for Challenging Industrial Cases. Proceedings. 2018; 2(8):378. https://doi.org/10.3390/ICEM18-05196
Chicago/Turabian StyleMahmoud, El-Kafafy, Peeters Bart, Geluk Theo, and Guillaume Patrick. 2018. "A Robust Test-Based Modal Model Identification Method for Challenging Industrial Cases" Proceedings 2, no. 8: 378. https://doi.org/10.3390/ICEM18-05196
APA StyleMahmoud, E.-K., Bart, P., Theo, G., & Patrick, G. (2018). A Robust Test-Based Modal Model Identification Method for Challenging Industrial Cases. Proceedings, 2(8), 378. https://doi.org/10.3390/ICEM18-05196