Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery †


Abstract
:1. Introduction
2. Experiments
2.1. Image Acquisition
2.2. Image Pre-Processing
2.3. Generation of Surface Model and Orthoimage
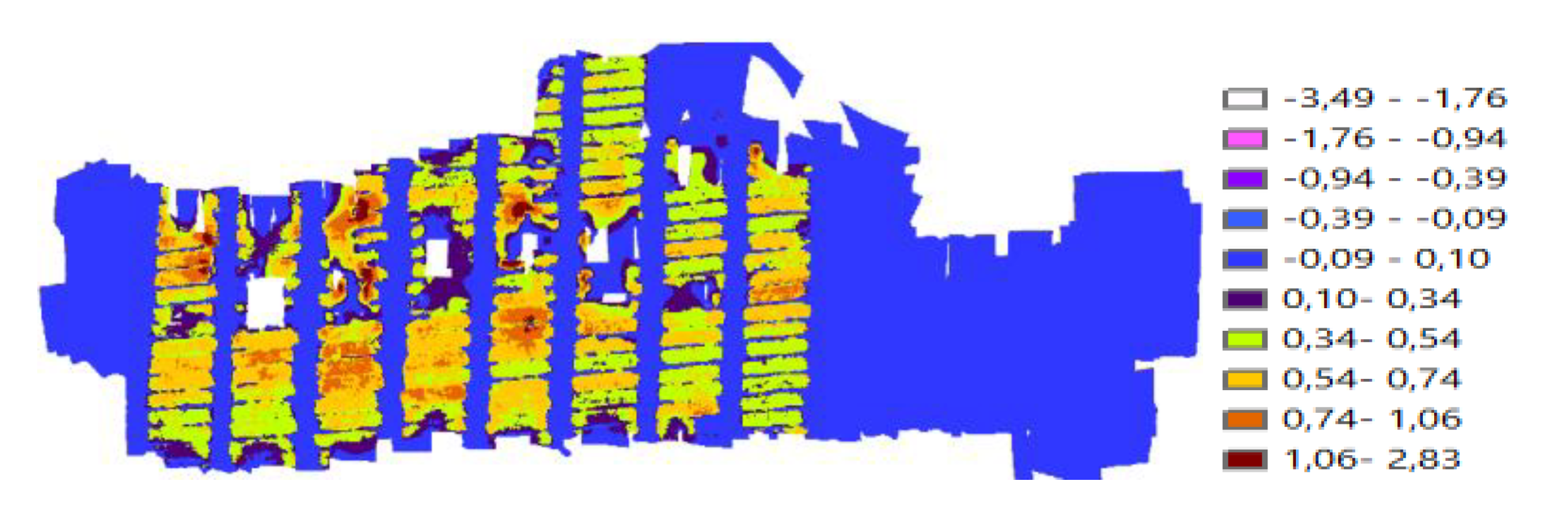
3. Results and Discussion
4. Conclusions
Author Contributions
Abbreviations
| DSM | Digital surface model |
| nDSM | Normalized digital surface model |
| UAV | Unmanned air vehicle |
References
- Maliye Bakanlığı, T.C. Yıllık Ekonomik Rapor 2016; Turkish Parliament: Ankara, Turkey, 2017; p. 99. (In Turkish) [Google Scholar]
- Bendig, J.; Bolten, A.; Bareth, G. UAV-based Imaging for Multi-Temporal, very high Resolution Crop Surface Models to monitor Crop Growth VariabilityMonitoring des Pflanzenwachstums mit Hilfe multitemporaler und hoch auflösender Oberflächenmodelle von Getreidebeständen auf Basis von Bildern. Photogramm. Fernerkundung Geoinf. 2013, 2013, 551–562. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Tilly, N.; Hoffmeister, D.; Cao, Q.; Huang, S.; Lenz-Wiedemann, V.; Miao, Y.; Bareth, G. Multitemporal crop surface models: Accurate plant height measurement and biomass estimation with terrestrial laser scanning in paddy rice. J. Appl. Remote Sens. 2014, 8, 83623–83671. [Google Scholar] [CrossRef]
- Possoch, M.; Bieker, S.; Hoffmeister, D.; Bolten, A.; Schellberg, J.; Bareth, G. Multi-Temporal Crop Surface Models Combined with the RGB Vegetation Index from Uav-Based Images for Forage Monitoring in Grassland. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI, 991–998. [Google Scholar] [CrossRef]
- Lelong, C.C.; Burger, P.; Jubelin, G.; Roux, B.; Labbé, S.; Baret, F. Assessment of Unmanned Aerial Vehicles Imagery for Quantitative Monitoring of Wheat Crop in Small Plots. Sensors 2008, 8, 2557–3583. [Google Scholar] [CrossRef] [PubMed]
- Sugiura, R.; Tsuda, S.; Tamiya, S.; Itoh, A.; Nishiwaki, K.; Murakami, N.; Shibuya, Y.; Hirafuji, M.; Nuske, S. Field phenotyping system for the assessment of potato late blight resistance using RGB imagery from an unmanned aerial vehicle. Biosyst. Eng. 2016, 148, 1–10. [Google Scholar] [CrossRef]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Fritz, A.; Kattenborn, T.; Koch, B. Uav-Based Photogrammetric Point Clouds Tree Stem Mapping In Open Stands In Comparison To Terrestrial Laser Scanner Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. W2. [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Pateraki, M.N. Adaptive Multi-Image Matching for DSM Generation from Airborne Linear Array CCD Data; Gruen, P.D.A., Ed.; ETH Zurich: Zurich, Switzerland, 2005. [Google Scholar]
- Wallis, H. An approach for the space variant restoration and enhancement of images. In Proceedings of the Symposium on Current Mathematical Problems in Image Science, Monterey, CA, USA, 10–12 November 1976. [Google Scholar]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Karagöz, A.; Özbek, K.; Akar, T.; Ergün, N.; Aydoğan, S. İsmail; Sayım Agro-Morphological Variation Among an Ancient World Barley Collection. J. Agric. Sci. 2017, 23, 444–452. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Mean | Median | Standard Deviation |
|---|---|---|
| 4.66 | 3.75 | 13.78 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demir, N.; Sönmez, N.K.; Akar, T.; Ünal, S. Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery. Proceedings 2018, 2, 350. https://doi.org/10.3390/ecrs-2-05163
Demir N, Sönmez NK, Akar T, Ünal S. Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery. Proceedings. 2018; 2(7):350. https://doi.org/10.3390/ecrs-2-05163
Chicago/Turabian StyleDemir, Nusret, Namık Kemal Sönmez, Taner Akar, and Semih Ünal. 2018. "Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery" Proceedings 2, no. 7: 350. https://doi.org/10.3390/ecrs-2-05163
APA StyleDemir, N., Sönmez, N. K., Akar, T., & Ünal, S. (2018). Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery. Proceedings, 2(7), 350. https://doi.org/10.3390/ecrs-2-05163