Abstract
Athlete monitoring and performance investigations are crucial for athletes and coaches as part of training progress and injury recovery. Athlete training is not always conducted at special training facilities even at some points without a coach being able to take part at every training session. Small IMUs are offering a great benefit as they allow recording nearly every conducted training session. The research presented here used a self-developed IMU in comparison with a tethered velocity meter to investigate the arm symmetry in freestyle swimming. The recorded data were firstly calibrated before it was high-pass filtered to remove gravity from the signal. A zero-crossing detection algorithm was applied to allow the separation into left- and right-arm strokes to find variations in distances. The results showed a very strong agreement between the IMU and the velocity meter of r2 > 0.99 for each individual athlete with a mean agreement over all participants of r2 = 0.9994.
1. Introduction
The investigation of swimming performance monitoring is of great interest for athletes and coaches as part of performance improvement. Technology used nowadays includes mostly video camera systems and tethered velocity meters. These systems are usually very bulky, difficult to install and to operate and very expensive. Video systems need a time consuming digitization process before a data analysis can be undertaken whereas a velocity meter can only measure movements into one direction and therefore disqualifies for a competitive training session. Due to the complexity of such equipment as well as the low availability, majorly caused by the expensive cost of such systems, athlete tracking cannot be conducted for each training session. While major improvements of an athlete’s swimming style can be seen by an experienced coach without the help of technical equipment, he will need the help of this equipment to investigate minor improvements in the athlete’s technique.
In recent years accelerometers have become more available, majorly due to the reduction in weight, size, and price. These devices are capable of measuring the acceleration of the swimmer (tri-axial) during the course of a swim or training session and record these data mostly on a local storage [1,2,3,4,5,6,7,8,9,10,11]. These data can be downloaded and assessed allowing a detailed investigation of different training sessions as well as the monitoring of the athlete’s training development [4,12,13,14]. Accelerometers have been used by many other researchers to find accurate stroke rates [2,5,6,15], lap split times [2,3,6,7,9], as well as real-time feedback to swimmers using optical communication [16,17]. The investigation of arm symmetry in freestyle swimming during training and competition has only been presented Stamm et al. [15] and is still novel in the field of swimming research.
2. Methods
2.1. Instrumentation
This study used a custom designed inertial measurement unit (IMU) [18] which contained a tri-axial accelerometer with a range of ±8 g, tri-axial gyroscope (1500 degrees per second) and radio capabilities. The sensor comes in a waterproof casing and records each session at a sampling rate of 100 Hz on an internal 1 GB memory. A tethered velocity meter (Speed Probe 5000—SP5000) was used as a reference system [19]. This velocity meter uses a very thin non-stretchable nylon line which oases by an optical sensor. The sensor measures and records the elapsed time for every cm of pulled line and transfers the measurements to an USB connected computer.
2.2. Data Collection
Eight junior elite swimmers (Table 1) with national training experience (Australia) took part in this study which has been approved by an ethics committee in line with the Helsinki protocol for human research. Data were collected at an Olympic sized temperature controlled outdoor pool (50 m). Each swimmer conducted an individual warm up lap followed by 3 low effort laps.

Table 1.
List of participating swimmers with their height, mass, age, experience, and gender.
The IMU was taped to the swimmers lower back, as close as possible to the athlete’s costume, where the tether was connected to the swimmer (Figure 1). The anterior-posterior direction is represented by az, the mediolateral direction by ax, and the most interesting forward direction by ay.
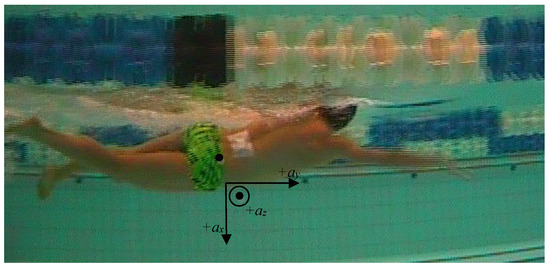
Figure 1.
IMU taped to the athlete with the coordinate system in regards to the IMU.
The data were downloaded into MATLAB® using a self-developed graphical user interface (GUI) utilizing the radio link provided by the IMU after each individual training session was conducted.
2.3. Data Analysis
The downloaded acceleration data collected by the IMU where firstly calibrated using a calibration method similar to the method described by Lai et al. [20]. Afterwards it was high-pass filtered using a Hamming windowed FIR filter with a 0.5 Hz cut-off frequency as described by James et al. [21] and applied by Stamm et al. [4,15]. This was done to remove the sensor orientation from the acceleration signal (gravity removal). To find the arm symmetry, a separation between left and right arm strokes had to be conducted, which was done using a zero-crossing detection algorithm as described by Stamm et al. [4].
According to the IMU attachment to the swimmer (Figure 1), a left arm stroke occurred when ax < 0 g while a right arm stroke occurred when ax > 0 g. The zero-crossing algorithm results were then used to investigate the arm symmetry based on stroke length.
Figure 2 presents the recorded forward acceleration (ay in blue) and the gravity components in the signal (red) which have been removed from the acceleration data before further processing was conducted. The gravity corrected data were then fed into the zero-crossing detection algorithm to separate the left and right arm strokes. Figure 3 presents the results of the zero-crossing algorithm applied to the mediolateral acceleration data which basically represents the body-roll of the swimmer.
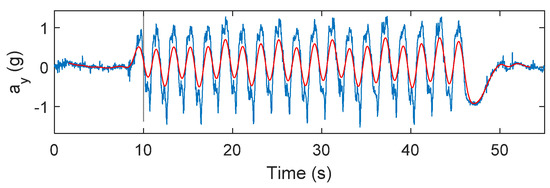
Figure 2.
Raw acceleration (blue) with the overlapping sensor orientation (red).
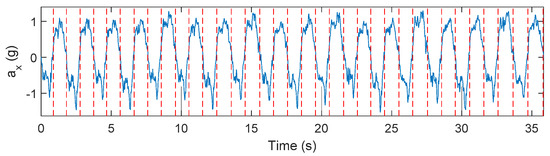
Figure 3.
Mediolateral acceleration (gravity corrected, blue) with the overlapping zero-crossing detection result (red).
To find the left and right arm distances swum, a lap velocity profile was calculated as described by Stamm et al. [9], followed by the calculation of a lap distance profile for each individual swimming lap. The lap distance profile was then separated into left and right arm strokes to find the distance variations. From these variations left and right stroke length patterns were calculated as shown in Figure 4.
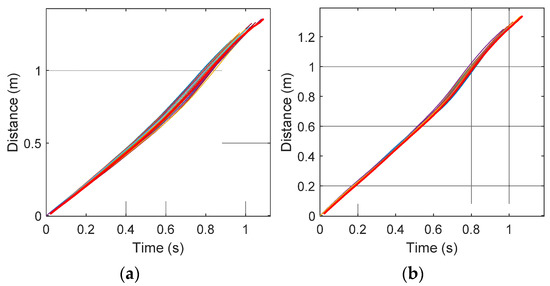
Figure 4.
Individual stroke distances with the pattern overlapped (red): (a) left arm; (b) right arm.
3. Results
Three laps within the trials had to be excluded from the data analysis due to problems with the tethered velocity meter. This left a total of 21 freestyle swimming laps for further analysis. The applied zero-crossing detection algorithm allowed the investigation of left and right arm stroke durations and the stroke length. Table 2 presents the results of the mean values for each individual swimmer including the mean standard deviation (SD).
Table 2.
Left and right arm mean stroke durations and stroke lengths including the standard deviation (SD) for each swimmer.
Comparing the distance calculated from the IMU measurements with the distance captured by the SP5000 at every instance of time allows a regression analysis and therefore finding the slope, intercept and r2 for each conducted freestyle swimming lap. As every swimmer conducted multiple swimming laps, only the mean slope, intercept and r2 are presented in Table 3. The results of the regression analysis proof that both methods have a very strong agreement with a mean r2 > 0.99, a mean slope of 0.96, and a mean intercept of 0.93.
Table 3.
Results of the regression analysis for the distance calculated from the IMU measurements vs. tethered velocity meter distance.
4. Discussion & Conclusions
This research investigated the arm symmetry of athletes in freestyle swimming utilizing a tethered velocity meter and a self-developed IMU attached to the lower back of the swimmer. The recorded tri-axial acceleration recording was high-pass filtered to remove the sensor orientation (gravity) from the wanted signal before a zero-crossing algorithm was applied to the data to find the arm timings. The sensor orientation corrected acceleration recording was then used to calculate a lap velocity profile and further a lap distance profile for each individual swimming lap and swimmer. The method used was an approximation to the numerical integration (trapezoidal rule). The detected zero-crossings were then applied to the lap distance profile of each individual swimming lap to separate the left and right arm distance (Figure 4). Table 2 shows that there is a relation between stroke duration and stroke distance. Longer stroke durations lead to a longer stroke distances for the majority of the tested athletes.
A regression analysis; comparing the distance (IMU and SP5000) at every instance of time during the course of a freestyle swimming lap; for each individual lap was conducted with the mean results of each individual swimmer presented in Table 3. It can be seen that the agreement between the two different measurement methods is very strong with an r2 = 0.99 for each individual athlete being tested.
It can be concluded that the IMU used in this research is an appropriate substitute for the tethered velocity meter in order to determine the stroke distance and the stroke duration.
Considering the small size and weight of the used IMU, it allows the usage at nearly every training session conducted by the athlete. This allows every athlete or coach to record all conducted training session without the need of complex or bulky equipment. It offers the opportunity to investigate the swimmers arm symmetries over a long period of time and therefore allows keeping track of improvements in swimming style or recovery progress after an occurred injury. Furthermore it allows coaches to identify small asymmetries in an athletes swimming style and adjust the training appropriately to help the swimmer improving the swimmers style.
Acknowledgments
The authors would like to thank all athletes who participated in this study and Brendan Burkett at the University of the Sunshine Coast for providing the facility for the trial. The conducted work has been supported by a grant from the Australian Research Council.
Conflicts of Interest
The author declares no conflict of interest.
References
- James, D.; Davey, N. Swimming Stroke Analysis Using Multiple Accelerometer Devices and Tethered Systems. In The Impact of Technology on Sport II; CRC Press: Boca Raton, FL, USA, 2007; pp. 577–582. [Google Scholar]
- Davey, N.; Anderson, M.; James, D.A. Validation trial of an accelerometer-based sensor platform for swimming. J. Sports Technol. 2008, 1, 202–207. [Google Scholar] [CrossRef]
- Le Sage, T.; Bindel, A.; Conway, P.; Justham, L.; Slawson, S.; West, A. Embedded programming and real-time signal processing of swimming strokes. Sports Eng. 2011, 14, 1–14. [Google Scholar] [CrossRef]
- Stamm, A.; James, D.A.; Hagem, R.M.; Thiel, D.V. Investigating Arm Symmetry in Swimming using Inertial Sensors. In Proceedings of the IEEE Sensors 2012, Taipei, Taiwan, 28–31 October 2012. [Google Scholar]
- Khoo, B.H.; Lee, B.K.J.; Senanayake, S.M.N.A.; Wilson, B.D. System for determining within-stroke variations of speed in swimming (SWiSS). In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, Singapore, 14–17 July 2009; pp. 1927–1932. [Google Scholar]
- Le Sage, T.; Conway, P.; Justham, L.; Slawson, S.; Bindel, A.; West, A. A Component based Integrated System for Signal Processing of Swimming Performance. In Proceedings of the SIGMAP, Athen, Greece, 26–28 July 2010; pp. 73–79. [Google Scholar]
- Daukantas, S.; Marozas, V.; Lukosevicius, A. Inertial sensor for objective evaluation of swimmer performance. In Proceedings of the 11th International Biennial Baltic Electronics Conference, Tallinn, Estonia, 6–8 October 2008; pp. 321–324. [Google Scholar]
- Bächlin, M.; Tröster, G. Swimming performance and technique evaluation with wearable acceleration sensors. Pervasive Mob. Comput. 2011, 8, 68–81. [Google Scholar] [CrossRef]
- Stamm, A.; James, D.; Thiel, D. Velocity profiling using inertial sensors for freestyle swimming. Sports Eng. 2012, 16, 1–11. [Google Scholar] [CrossRef]
- Stamm, A.; Thiel, D.V.; Burkett, B.; James, D.A. Towards determining absolute velocity of freestyle swimming using 3-axis accelerometers. Procedia Eng. 2011, 13, 120–125. [Google Scholar] [CrossRef]
- Stamm, A.; James, D.A.; Burkett, B.B.; Hagem, R.M.; Thiel, D.V. Determining Maximum Push-off Velocity in Swimming Using Accelerometers. Procedia Eng. 2013, 60, 201–207. [Google Scholar] [CrossRef]
- Wilson, G.J.; Newton, R.U.; Murphy, A.J.; Humphries, B.J. The optimal training load for the development of dynamic athletic performance. Med. Sci. Sports Exerc. 1993, 25, 1279–1286. [Google Scholar] [CrossRef] [PubMed]
- Avalos, M.; Hellard, P.; Chatard, J.C. Modeling the Training-Performance Relationship Using a Mixed Model in Elite Swimmers. Med. Sci. Sports Exerc. 2003, 35, 838–846. [Google Scholar] [CrossRef] [PubMed]
- Stamm, A.; Thiel, D.; Burkett, B.J.; James, D.A. Roadmapping performance enhancement measures and technology in swimming. In The Impact of Technology in Sport II; CRC Press: Boca Raton, FL, USA, 2009; pp. 213–217. [Google Scholar]
- Stamm, A.; Thiel, D.V. Investigating Forward Velocity and Symmetry in Freestyle Swimming Using Inertial Sensors. Procedia Eng. 2015, 112, 522–527. [Google Scholar] [CrossRef]
- Hagem, R.M.; Haelsig, T.; O’Keefe, S.G.; Stamm, A.; Fickenscher, T.; Thiel, D.V. Second Generation Swimming Feedback Device Using a Wearable Data Processing System based on Underwater Visible Light Communication. Procedia Eng. 2013, 60, 34–39. [Google Scholar] [CrossRef]
- Hagem, R.M.; Sabti, H.A.; Thiel, D.V. Coach-Swimmer Communications Based on Wrist Mounted 2.4 GHz Accelerometer Sensor. Procedia Eng. 2015, 112, 512–516. [Google Scholar] [CrossRef]
- James, D.A.; Leadbetter, R.I.; Neeli, M.R.; Burkett, B.J.; Thiel, D.V.; Lee, J.B. An integrated swimming monitoring system for the biomechanical analysis of swimming strokes. Sports Technol. 2011, 4, 141–150. [Google Scholar] [CrossRef]
- Swift Performance Equipment. Swift Sports Speed Probe 5000V. Available online: http://www.spe.com.au/ (accessed on 28 August 2010).
- Lai, A.; James, D.A.; Hayes, J.P.; Harvey, E.C. Semi-automatic calibration technique using six inertial frames of reference. In Proceedings of the Microelectronics: Design, Technology, and Packaging, Perth, Australia, 30 March 2004. [Google Scholar]
- James, D.A.; Wixted, A. ADAT: A Matlab toolbox for handling time series athlete performance data. Procedia Eng. 2011, 13, 451–456. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).