2. Theoretical Framework
Let us assume that the goal of the SHM system is the estimation of a set of parameters (e.g., mechanical properties, geometrical properties, damage indices) defined within an appropriate mathematical numerical model, used to predict the response of the structure to given loads. Within a Bayesian framework, the prior probability density function (pdf)
(where
is the random vector of the
parameters to be estimated) can be updated into the posterior pdf
, when the measurements
are collected through the sensor network. Following a Bayesian experimental design approach, the overall information provided by the measurements can be quantified using the information theory, as introduced in [
5]. Applying these concepts to the problem of optimal sensor placement, a strategy based on the combination of surrogate models (see [
6]) and stochastic optimization (see [
7]), was introduced in [
4,
8]. Let us call
the number of measurements,
the pdf of the prediction error
, and
the design variables which provide the spatial configuration of the network on the structure. The optimal sensor placement configuration
can be obtained by maximizing the expected Shannon information gain
, see [
4]; in doing this, parameters
and
are supposed to be fixed for a specific optimization problem.
In general, the expected Shannon information gain is a function of
,
and
. The prediction error
depends on both the model error
and the measurement noise
. In [
9], it was proven that the spatial correlation among different measurements, which is embedded into
, affects the optimal sensor configuration
. On the other hand, if the environmental effects are neglected, the pdf of the measurement noise
can be directly linked to the employed sensors, as the probability model
depends on the sensor characteristics. The sensor network can be therefore optimized, in terms of spatial configuration, number and type of sensors, by maximizing the expected Shannon information gain according to:
where
is instead supposed to be constant.
Assuming that
is sampled from a zero mean Gaussian pdf
, where
is the mean vector, and
is the covariance matrix, then
. For the sake of simplicity, we next assume that there is no correlation between measurements and so
, where
is the standard deviation of measurement noise and
is the identity matrix. The optimization statement in Equation (
1) thus becomes:
The function
, corresponding to the maximum of the objective function for each value of
and
, is computed for the corresponding optimal sensor configuration
. As
depends on the choice of
, then
is implicitly a function of
and
only. It can be proven [
10] and numerically shown [
11] that
increases as the number of sensors gets higher (more information is provided by the SHM system). Moreover, if
increases then
decreases, since the structure response gets hidden by the measurement noise [
12]. Thus, it follows that
is a monotonically increasing function of
and a monotonically decreasing function of
: additional constraints need therefore to be handled in order to obtain the optimal solution of Equation (
2).
Three types of constraints are here taken into account:
- (a)
technological constraint , with designating the standard deviation of the measurement noise of the most accurate sensor available on the market, to provide measurements ;
- (b)
identifiability constraint
, with
designating the minimum number of measurements required to guarantee identifiability and observability of the parameters
(see [
2,
13,
14,
15] );
- (c)
cost constraint , with designating the cost model of the SHM system and B the maximum available budget.
The resulting constrained optimization problem is formulated as follows:
As far as the cost model is concerned, the simplest formulation, includes a constant overall contribution
, which takes into account the cost of data acquisition hardware, database, assemblage, etc., and a variable contribution, which takes instead into account the cost of the sensors. The associated expression is:
where
is the cost per unit sensor.
One possible approach for solving the optimization problem would consist in defining a new design variable to account for
and
; next, the optimal solution is obtained by applying an optimization algorithm for stochastic problems, like the Covariance Matrix Adaptation-Evolution Strategy [
7]. When only a limited number of sensor types is available, an alternative approach is based on the computation of the function
on a set of points
, as shown in
Section 3.
The optimization problem introduced in Equation (
3) allows to design a sensor network such that the provided information is maximized, given a certain budget
B. Following a usual method in decision making strategies (see [
16]), an alternative optimization rationale would be to maximize the ratio between the expected Shannon information gain and the cost of the SHM system, in a sort of cost-benefit analysis. Thus, the following utility-cost index (UCI) is defined:
where the associated measurement unit is [nat/€], [nat] being natural unit of information. The resulting optimization problem then becomes:
The above formulation allows to obtain the most efficient SHM design, i.e., to maximize the information per unitary cost.
As regards the solution of the optimization problem, the objective function to be maximized turns out to be now , where is the optimal sensor configuration, for each value of and .
The application of the two formulations defined in Equations (
3) and (
6) to the optimal design of a SHM system is presented in
Section 3.
3. Results
The method presented in
Section 2 is applied to the Pirelli tower, a 130 m tall building in Milan. The associated finite element model features a total number of 4106 nodes, each one with 6 degrees of freedom, i.e., the displacement components
,
and
along the three axes
,
and
of an orthonormal reference frame and the rotation components
,
and
about the same axes. For further details on the model, the reader may refer to [
17]. We herein assume that measurements can be either displacements or rotations;
parameters, including both geometrical and mechanical properties, ought to be inferred (see [
8] for further details on the choice of the parameters).
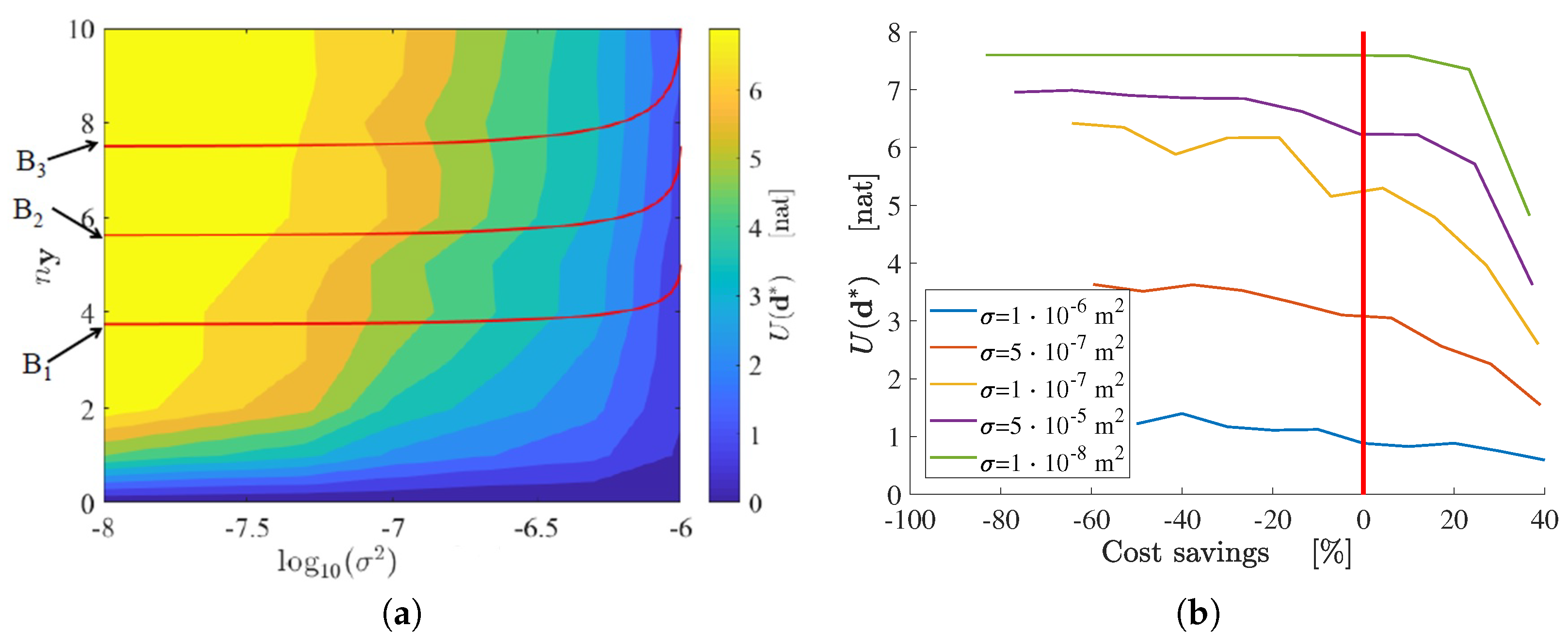
In
Figure 1a, the contour plot of the objective function
is shown at varying number
and accuracy of the sensors (measured through
). As previously discussed, the plot shows that the maximum value of the expected Shannon information gain increases as
gets higher and as the standard deviations decreases. It can be also observed that the increase in the expected Shannon information gain due to each additional measurement gets lower as more measurements are considered. In other words, the derivative
of the expected Shannon information gain with respect to the number of sensors is a decreasing function of
. Interpreting the optimization problem within a decision-making view, it is interesting to underline that this behaviour corresponds to the so-called “law of diminishing marginal utility” (also known as Gossen’s First Law [
18]), which was proposed for problems of resources allocation optimization. This law states that the marginal utility of a certain system, due to an additional unit, decreases as the supply of units increases. In the current problem of optimal SHM system design, the utility, i.e., the benefit of the sensor network is quantified by the expected Shannon information gain (see
Section 2), and the unit is represented by each measurement.
If the cost model defined in Equation (
4) is employed, the red lines in
Figure 1a represent different budget constraints, i.e., the solutions
of the equation
, with
B being the available budget (in the example
€,
€,
€). This graph allows the designer to choose the optimal SHM sensor network characteristics
and
and the associated optimal configuration
, which corresponds to the maximum
: it is worth noting that in this case the solution is basically ruled by the budget constraint. A discussion about the optimal configurations
obtained through the optimization procedure can be found in [
8].
A different approach for decision making is to define a Pareto front for
versus cost savings, as shown in
Figure 1b: each line here represents the optimal design for a certain standard deviation
, i.e., a certain type of sensors. Along the x-axis the cost saving is represented, which is defined as the cost function normalized with respect to the chosen budget; the vertical straight line represents the budget
B. Any design point located on the left of each line represents a non-optimal solution, i.e., the associated cost does not correspond to the best choice of
.
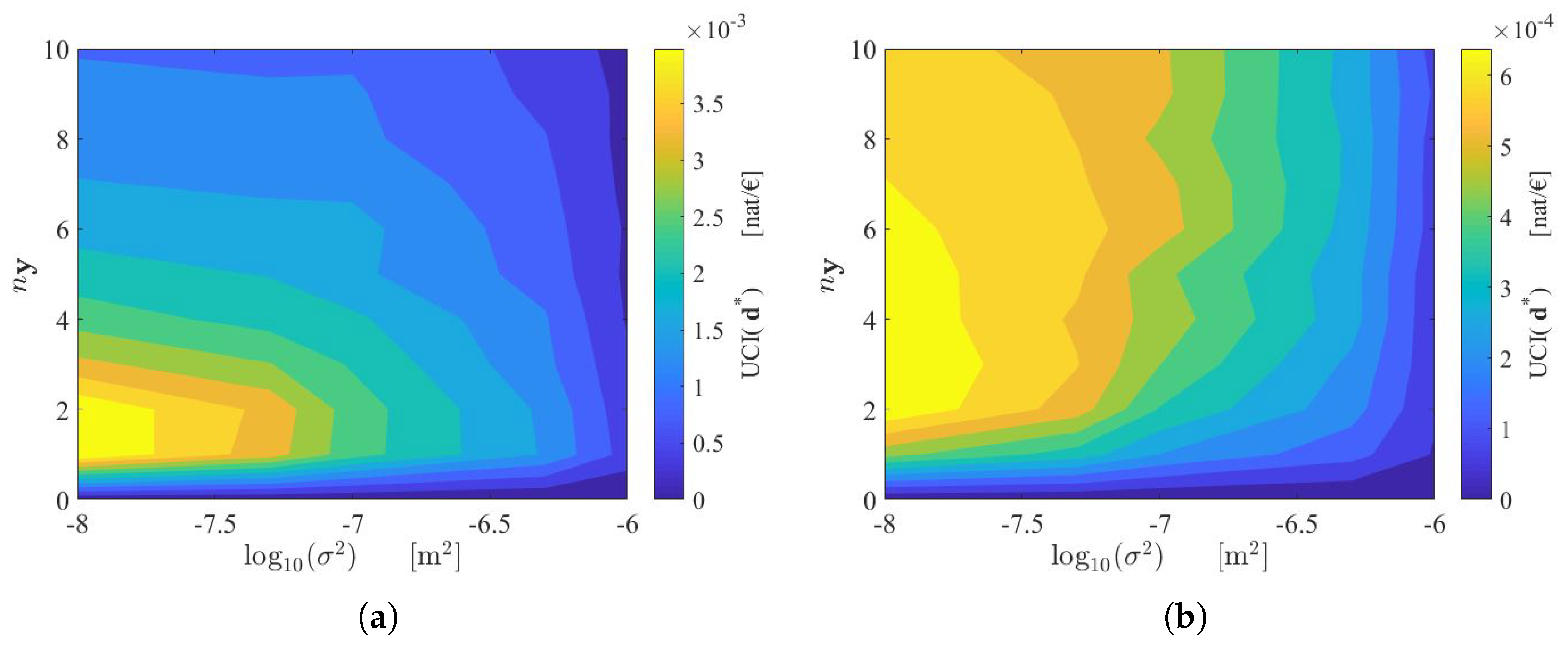
The alternative design optimization approach defined in Equation (
6) is based on the maximization of the ratio
. The resulting optimal solution obviously depends on the cost model: in
Figure 2a the SHM system is supposed to have a lower cost
€; in
Figure 2b the SHM system is supposed to have a higher cost
€. In both cases, the most efficient allocation of resources is obtained if the best sensors, in terms of measurement noise, are chosen; the optimal number of sensors depends instead on the cost model: the higher
, the higher
.
It is worth noting that, while the function always increases with and , the function presents a maximum for a finite value of . As previously discussed, the increase in information associated with each additional sensor decreases as more sensors are considered: from a cost-benefit point of view, it is therefore worthless to add sensors, i.e., to increase the SHM cost, if the associated additional benefit (the additional expected Shannon information gain) becomes too low.



{kind=link}
{kind=link}

