1. Introduction
Although cooperative driving is expected to be the future of the Intelligent Transportation Systems (ITS) and a lot of examples of technical developments, proof of concepts and applications and services can be found in the literature, nowadays there is not any vehicle manufacturer that deploys Vehicle-to-Vehicle (V2V) based applications in commercial vehicles. Without wanting to delve into the reason of that issue, maybe the lack of a final standardization of IEEE 802.11p protocol or that there is no common position among the different manufacturers could be some of the big challenges of that.
Moreover, cooperative driving is expected to provide advance services to increase road safety, improve traffic management and create different new business opportunities for mobility services, but a technology to support this cooperative network must be provided [
1], even more, when the automobile industry is expected to increase their profit margin of Euro 54 billion in 2012 to Euro 79 billion by 2020 [
2]. Jointly with this scenario, the inclusion of the concept Internet of Vehicles (IoV) into the world of Internet of Things (IoT) [
3] , introduces the need of common interfaces to allow the interchange of information among all the elements that can connected in a ITS scenario.
Then, applying the concept of IoT into IoV, we face a framework where there could be a lot of data sources: vehicles (cars, trucks, motorbikes), elements of the infrastructure (signals, sensors, actuators, etc.), and others like pedestrians, bicyclist and so on. A scenario where all of them are inter-connected thanks to an IP-based communication platform.
Therefore, all these nodes (static and in movement at very different relative speeds) can generate, aggregate, consume and exchange information directly (using device-to-device communications) or indirectly (through a big data analysis platform of intelligent transportation [
4], for example), with the goal of resolving different kinds of events, to result in providing a more safe, efficient and eco-friendly Intelligent Transport Systems.
A cooperative vehicular scenario like this, where many different types of nodes, must face multiple communication challenges, such as the adverse propagation conditions, high vehicles’ mobility pattern and their unpredictable direction of motion, or the limited communication resources. For this reason, the technologies adopted to provide the communication architecture are a key factor that determine the performance of the network. Additionally, one of the reasons of the market penetration problem introduced above are the technical limitations that technologies such as IEEE 802.11p suffer. The main identified deficiency is the poor performance in high vehicle density scenarios resulting from the Medium Access Control (MAC) layer implementation based on a regular IEEE 802.11 Carrier Sense Multiple Access (CSMA). Moreover, it does not guarantee the Quality of Service (QoS), which is essential to fulfill the different performance requirements of cooperative applications in an Intelligent Transport Scenario (known as C-ITS). Furthermore, the use of mobile technologies in VANETs can be an alternative.
In this regard, new standards such as LTE-A support Device-to-Device (D2D) functionality since 3GPP Release 12 [
5]. This means that it is possible to establish a link between two devices without the need of a central node addressing the communication. This technology has already been tested in scenarios where nodes are static with the aim of maximizing the energy efficiency of the nodes. However, this technology was not meant to meet stringent (Vehicle to Everithing) V2X requirements in terms of latency, reliability and mobility. These limitations have motivated the research community to investigate cellular-based V2X communications [
6].
In these standards, D2D links can operate reusing radio resources assigned to normal cellular users, known as Common User Equipment (C-UE) which uses the eNodeB (the base station) to address its communications. More concretely, a Resource Block (RB) is the smallest unit of resources that can be allocated to a node, and they are a specific frequency and time slot assigned to a node to establish a communication. To define how the radio resources are shared among D2D links and C-UEs, different methodologies are available. Most of them are grouped into underlay and overlay methods.
For example, in a VANET scenario where an underlay approach is used, the same resources can be simultaneously utilized by the Vehicular User Equipment (V-UE) involved in V2V communication and by the ordinary C-UE. This approach can improve the use of cellular spectrum and reduce the energy consumption of V2V communications. However, the reuse of RB comes at the expense of increased interference level between C-UEs normal links and V-UE to V-UE links, what in turn must be neatly controlled by the network.
Then, the motivation of the work presented in this paper is to design an underlay (Radio Resource Management) RRM capable of improving cellular spectral efficiency that will not affect the performance of C-UEs’ communications. In this work, the efficiency is analysed from the perspective of the energy performance, understood as the number of bytes transmitted per watt consumed. Part of the methodology presented in this paper joind to its mathematical development was introduced at [
7]. While that paper was focused on testing the throughput efficiency of applying this method and also a brief test of its energy performace, the work presented in this paper is only focused on the energy performance analysis solving the Minimum-rate-oriented Power Control (MPC) problem, presenting the progress made improving the proposed methodology.
The paper is structured as follow:
Section 2 presents a short state of the art where similar aproaches are compared with the proposed solution.
Section 3 introduces the MPC problem that is solved using the methodology proposed in
Section 4. Finally, the scenario where this methodology is described with the analysis of results at
Section 6. To complete the paper, the conclusions are included at
Section 7.
2. Related Work
Radio resource allocation plays a key role in mitigating interference and optimizing the use of resources for vehicular communications. Although generally considered a MAC layer problem, there is a close interaction with the design of the physical layer [
8]. D2D communications allow direct transmission between devices in close proximity without passing through the base station, allowing more information to be transmitted with much less delay. D2D communications can be performed:
In-band: cellular communication and D2D communication use the same spectrum licensed to the cellular operator.
Out-of-band: D2D communication uses unlicensed spectrum where cellular communication does not occur. It helps eliminate interference between D2D and mobile phone users, although the interference is still present in other electronic devices (such as Bluetooth and WiFi) operating in this band.
In-band D2D communications can be further classified into two categories:
Underlay where D2D transmitters timely access time frequency resources, known as Resource Block, occupied by cellular users. The underlay scheme leads to more opportunistic and therefore more efficient use of spectrum and more beneficial to operators.
Overlay where cellular and D2D transmitters use orthogonal time frequency resources (RBs). The overlay scheme is easier to implement, but less efficient.
D2D underlay communications can cause interference to the existing cellular network if not properly designed [
9]. Therefore, interference management is one of the most critical issues for D2D cellular networks where D2D and cellular communications coexist on the network. The most common solutions to control interference are to restrict the transmitting power of D2D links and the distance between users of D2D communication [
10].
Within the extensive research carried out in the context of traditional D2D systems (to quote some relevant articles [
10,
11,
12]), the work presented in [
13] offers an excellent introduction to the problem of radio resource allocation underlay.
In this paper, the authors propose an RRM solution that performs admission control and the power allocation for each permissible torque D2D and its potential UEs partners in order to maximize system performance by maximizing the SINR (Signal Interference Noise Ratio) of both communications. Once all permissible torques and their corresponding power levels are obtained, they apply a bipartite maximum weight match to define the final pairs.
Most of the literature assumes that the eNodoB is aware of the complete Channel State Information (CSI) status of all cellular and D2D links. This can work when D2D users are static or moving slowly. However, this assumption is too optimistic for V2V communication based on D2D, where the vehicle-related channels change rapidly due to vehicle mobility [
14]. Therefore, traditional resource allocation designs for D2D communications with full CSI are no longer applicable for V2V communications due to the formidable signal overload to track channel variation over such a short time scale.
Therefore, the application of D2D techniques to support vehicular communications requires a more detailed study of the management of radio resources to take account of this rapid change in the state of the channel. Along these lines, a feasibility analysis has been carried out in [
15] to evaluate the applicability of the D2D underlay resource allocation for the support of joint V2V and V2I connections in cellular networks. This study demonstrates that D2D-assisted vehicle underlay communications can surpass traditional V2V-only mode, V2I-only mode or V2V overlay mode in terms of achievable transmission speeds. However, only a few studies have applied this possibility in underlay mode to vehicle environments, including [
15,
16,
17,
18,
19,
20].
On the other hand, in the allocation of radio resources in traditional D2D systems, the main objectives are [
10,
21]:
However, in vehicular environments most messages are relatively small and have very strict requirements in terms of latency and reliability as they are messages to increase road safety. Therefore, the above objectives are not what should be achieved in the deployment of ITS security applications. Therefore, it is necessary to define different objectives for the allocation of resources in V2V communications, as stated in [
18,
19].
Once the optimization objectives are defined, the methodologies have to decode the resource allocation problem known as Resource Block Assignment Problem (RBAP). Throughout history, one could say that the most widely used method to solve RBAP is the Hungarian Algorithm (HA) [
22]. The HA is a combinatorial optimization algorithm originally designed to address allocation problems in a polynomial time. In this sense, it is interesting to note that the MT is a deterministic algorithm. This method has been applied to RBAP problems in jobs such as [
13,
19,
23]. In addition, the HA has been applied in other fields such as transport [
24] or the economy [
25]. In addition to the HA, other alternatives have been proposed in the literature to solve problems similar to those of the RBAP. In [
17], for example, two different methods are presented, the first based on dynamic programming, and the second consisting of a greedy algorithm. On the other hand, in [
26], a distributed dynamic spectrum protocol is developed.
This analysis leads to the conclusion that there is no solution for the allocation of radio resources that:
take advantage of the resource sharing gain offered by V2V underlay communications,
organize vehicles into clusters and take advantage of this organization to apply Minimum-rate- oriented Power Control (MPC) in V2V communications
solve the RBAP problem through metaheuristics to reduce algorithm complexity
Then in this conference paper the MPC problem is first defined in the following section. After that, proposed RODEO methodology is presented and finally its evaluation is discussed analysing its behaviour in defined scenarios.
3. MPC Problem Definition
The main objective of the proposed methodology is to offer an efficient solution for radio resources allocation in a scenario where vehicle (V-UEs) and cellular (C-UEs) users share Resource Blocks (RB). Efficiency is defined as maximizing the number of bytes transmitted per watt consumed. At the same time, it must be ensured that there is no interference between C-UEs and V-UEs communications due to BR sharing.
Unlike vehicular communications based on the IEEE 802.11p/1609 standard [
27], if cellular communications are used, as in the methodology presented in this paper, all ITS applications work over the service channel. This eliminates the need to modify previously standardized control channels and provides a scalable solution for future communications such as 5G.
To offer the possibility of transmitting different types of applications (security or infotainment), each with different requirements and using shared resources, it is important to manage the interference that can be created between the C-UEs links with the eNodeB (eNB) and the V-UEs to V-UEs links (V2V). In this work we are going to focus on the transmission of safety messages or CAM, so we will use the power sharing mode know as Minimum-rate-oriented Power Control (MPC) [
18]. In this case, the objective is to maximize the C-UE throughput and minimize the V-UE throughput while meeting the objective of maximizing the number of bytes transmitted per watt consumed.
In each t time interval, the Cluster Head is in charge of requesting from the eNB the RBs necessary for the V-UEs of its cluster. For their part, the C-UEs apply directly to the eNB for resources. In each frame, the number of RBs to be allocated by the eNB is fixed and limited, being the objective to serve the greatest number of users with the least number of RBs, maintaining the MPC premise. In addition, the eNB must take into account the QoS requirements of users, having to provide the MPC service. In order to solve this problem, the methodology introduced in the following section is presented.
4. RODEO Methodology Description
The proposed methodology has been named as RODEO (Rrm fOr unDerlay vEhicle cOmmunications). RODEO is a V2V underlay methodology, which allows V2V communication and a regular cellular link between a C-UE and the base station to coexist on the same channel. Because of this, one of the factors to take into account is the mutual interference generated between them, as this can seriously affect system performance. This interference can lead to significant degradation of the achievable speed of both V2V links and cellular links between C-UEs and the base station. Therefore, special attention needs to be paid to the selection of the reuse channel and the definition of transmission powers.
In a conventional D2D system, most centralized radio resource allocation schemes need to know the instantaneous global Channel State Information (CSI) to achieve optimum performance. However, in a vehicle network where vehicles are in motion and, in addition, change position continuously, the precise vaule of CSI is more complex to obtain. Compared to conventional D2D users, the geographical positions of V2V links are strongly correlated and predictable, as vehicles always travel along the road, so their future positions are highly predictable. This has been used in the literature to conclude that vehicle position-dependent algorithms can significantly reduce the dependence on the instantaneous global CSI and computational complexity of the solution, without sacrificing too much performance [
20,
23].
In this way, RODEO tries to take advantage of the advantages of both solutions:
Thus, based on the position of the vehicles and dividing the main problem into three subproblems, RODEO offers a solution to the allocation of radio resources in cellular networks where C-UEs and V-UEs coexist. These three subproblems are:
Pairing Problem: The first one is the pairing problem, in which in order to determine if a C-UE and a V-UE can share the same RB to transmit their messages, we calculate the minimum distance there should be between a C-UE and a V-UE transmitter to mitigate the interference. Knowing this distance, the eNodeB can select which are all the possible pairs.
Transmission Power Allocation: After solving the pairing problem, we continue with the second subproblem which is the transmission power assignation for each possible pair of C-UE and V-UE transmissions. Thereby, we have a bipartite graph with all the possible pairs with their respective transmission powers. With this transmission powers, it is easy to calculate the achievable throughput of the pair of communications which will be considered the weight of each pair in the bipartite graph.
RB Assignation: Having reached this point, we move to the third subproblem, where we end up with the RB assignation. To solve this combinatorial optimization subproblem we have design a specific parallel meta-heuristic.
5. Scenario Setup
This section describes the scenario defined to test the proposed solution. Both identified nodes such as vehicular users V-UEs and normal users, known as C-UEs, coexist in the system. As described above, the proposed solution should be able to allow M V-UEs to share the resources available on the uplink with N C-UEs. V-UEs users are the only one nodes which use D2D communications to implement V2V communications within the cluster. That is, vehicles are organized into clusters based on relative distances and speeds between them, but the creation and organization of these clusters is out of the scope of this article
It has only been decided to check the results of the proposed Resource Radio Management (RRM) methodology only when uplink links are shared due to the following reasons:
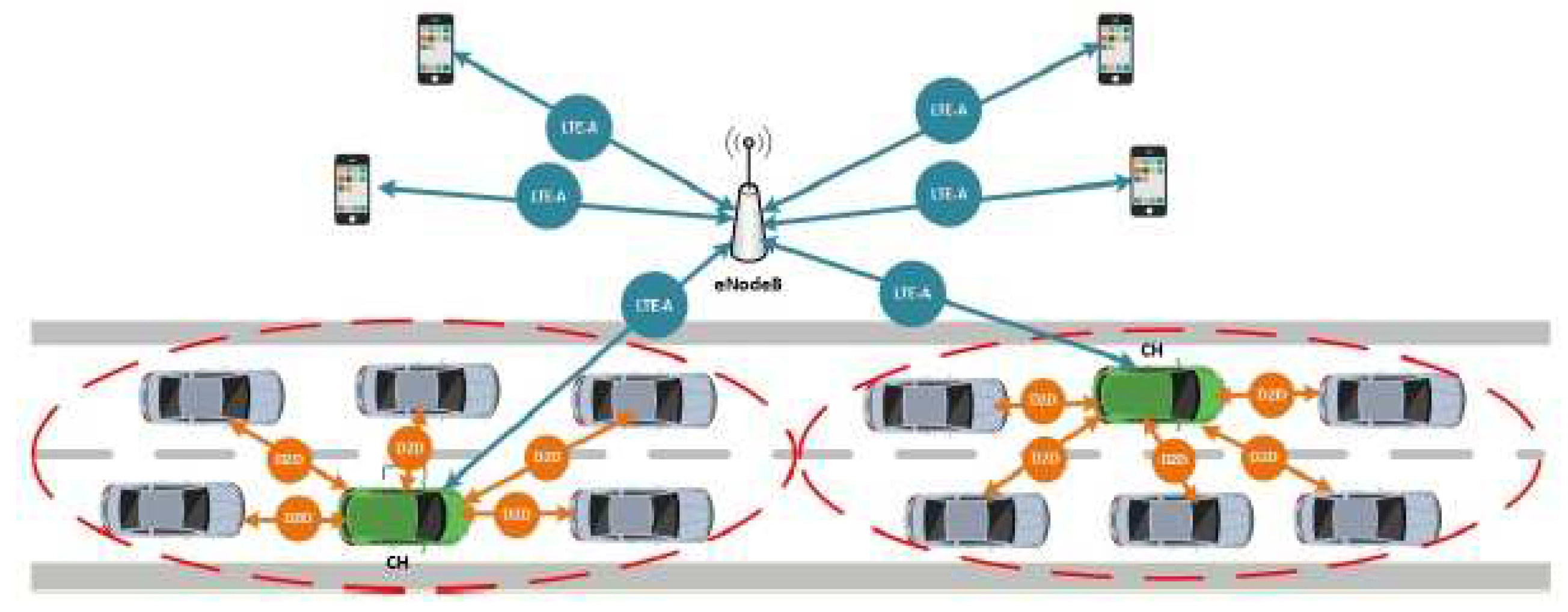
The scenario of the experiment consists on the users, the network architecture and the environment (
Figure 1). As it was introduced above, users can be V-UEs and C-UEs, which share Resource Blocks (RBs) to perform their transmissions on the uplink.
The network architecture is based on the LTE Release 14 standard and consists mainly of the cellular network infrastructure and the V2X server that enables the deployment of ITS applications. It is this server that manages all the information related to the state of the roads and vehicles. The application environment defines the environment in which V-UEs and C-UEs coexist. In the case of this work, a motorway type scenario is contemplated, thus assuming Line of Sight (LOS) communications between users.
This scenario is simulated in a MATLAB framework that implements the LTE Rel-12 architecture. Simulations have been carried out from two points of view:
Changing the volume of traffic generated by users, understood as the variation in the size of the packet transmitted by each of them.
Thus, 9 different scenarios have been considered, with scenario 1 with 5 C-UEs and 45 V-UEs and scenario 9 with 45 C-UEs and 5 VUEs on the coast. For each of the scenarios from 1 to 9, the number of C-UEs is increased by 5 and the number of V-UEs in each of the scenarios from 1 to 9 is decreased by 5 nodes.
To obtain a realistic analysis, we compare RODEO with the following already tested and checked methods:
Underlay RRM methodology which maximizes the sum rate of both C-UE and V-UE using the possibility of sharing both users the same RB for the transmission.
Overlay RRM methodology which maximize the sum rate of users using one RB for each transmission with the maximum transmission power.
6. Results and Discussion
This section presents the results obtained by RODEO to solve the MPC problem. To this end, the experimentation presented in previous section is carried out. This experimentation is evaluated from the perspective of the communications of the C-UEs, the V-UEs and the global set of communications of the users. In addition, the results are examined based on the volume of traffic generated by the CUEs and the proportion of C-UEs/V-UEs found in each scenario. Thus, the evaluation of the results obtained in the face of the MPC problem is carried out through the analysis of energy efficiency, understood as the number of bytes transmitted per watt consumed.
In a first analysis, if C-UEs communications are evaluated since the perspective of the energy efficiency regarding the traffic type and the scenario, the results obtained are shown at
Figure 2 and
Figure 3.
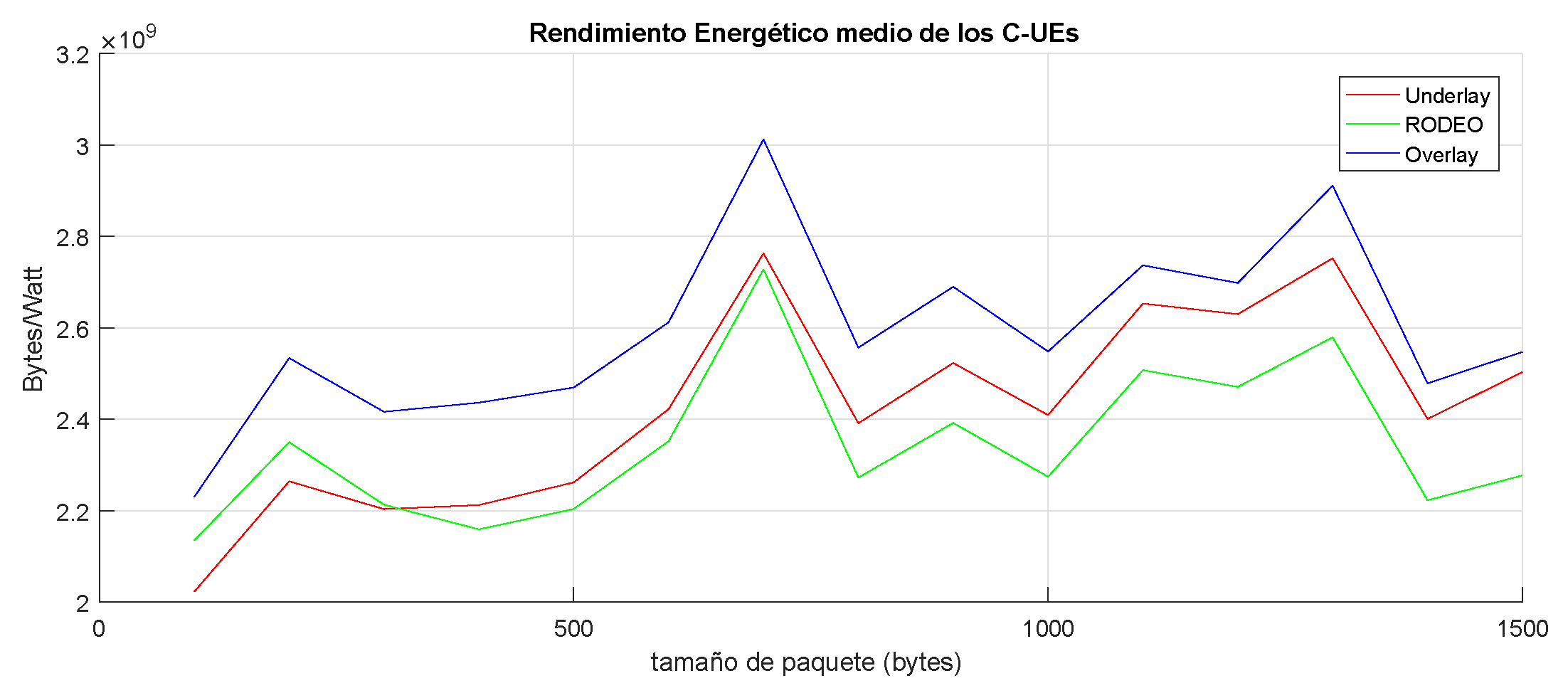
Figure 2 shows the energy performance results of C-UEs communications as a function of the volume of traffic they transmit. As in this case, the energy efficiency offered by RODEO is lower than that offered by the rest of the methodologies. In addition, it is observed how the best energy efficiency is offered by the overlay solution. This is so, since in the overlay solution there is no interference and, therefore, with the same transmission power, the throughput reached by a user is greater than when RBs are shared and interferences are generated. In addition, you can also see how the 3 solutions get their best performance with 700 and 1300 byte packets.
On the other hand,
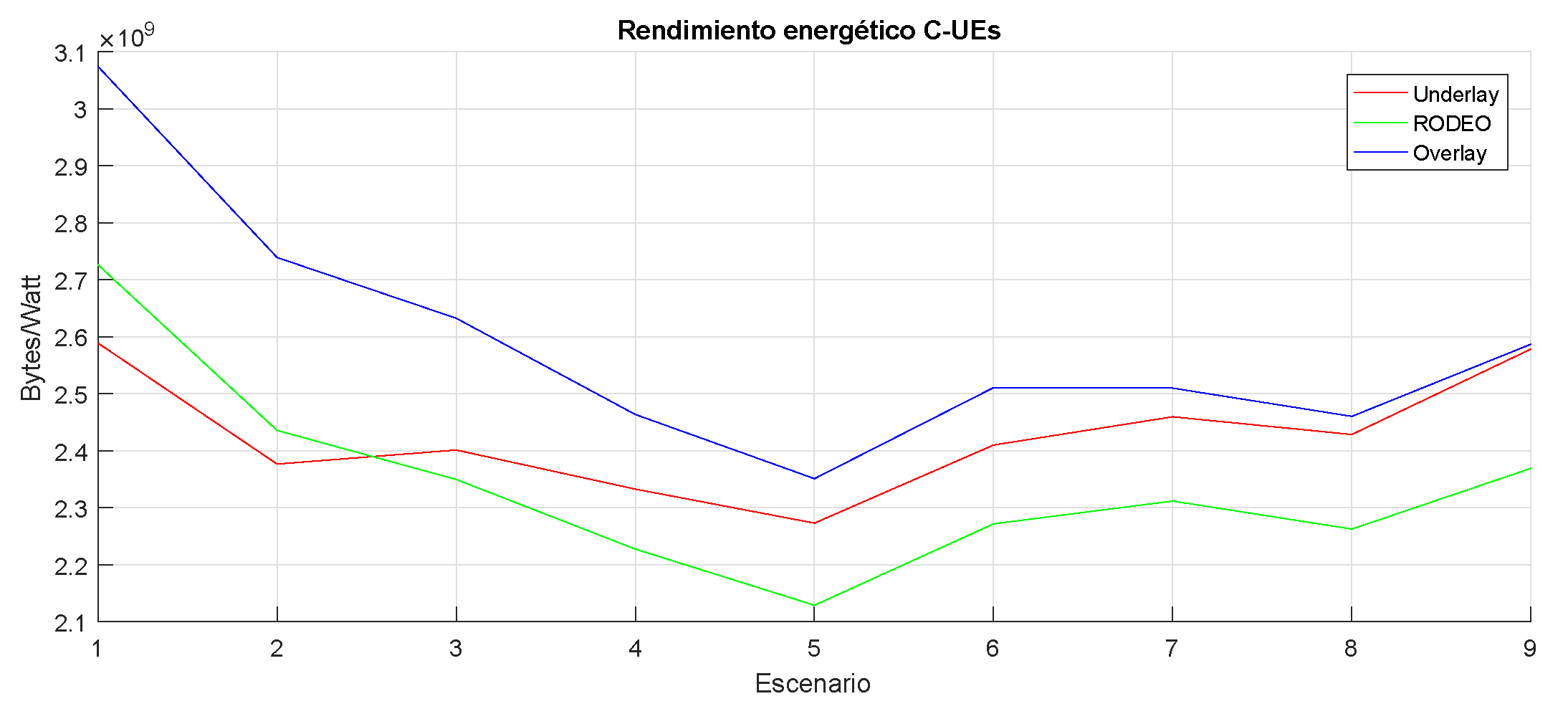
Figure 3 represents the energy performance of C-UEs communications according to the scenarios. In this case, RODEO also offers the worst performance to the C-UEs, and it is the overlay solution that offers the best performance. In addition to this, the graph shows that the energy efficiency reaches its minimum values in scenario 5, where we have as many C-UEs as V-UEs and therefore more interference is generated by more sharing of resources.
Figure 4 and
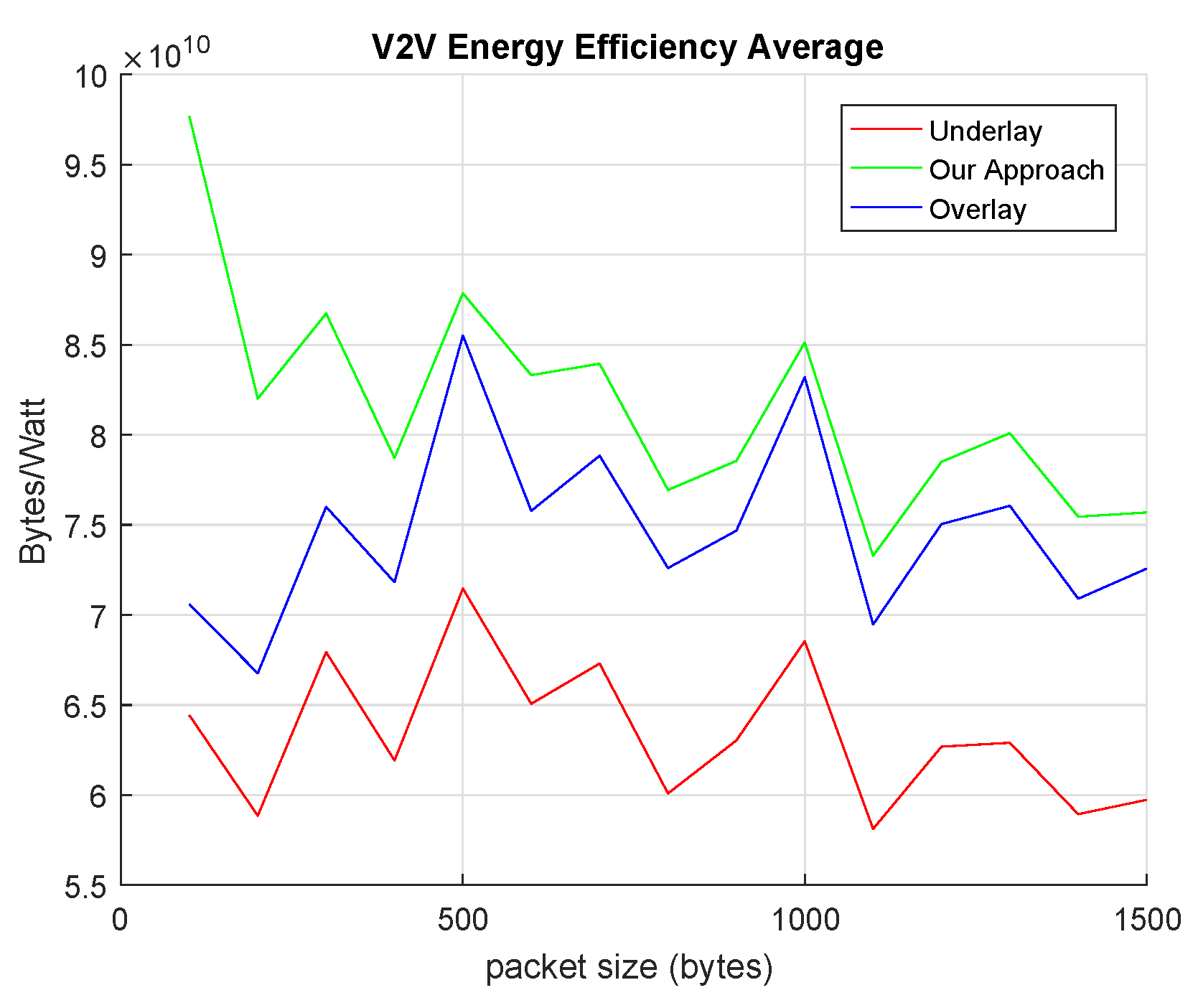
Figure 5 show the energy performance results offered by the 3 methodologies to V-EU users for the transmission of their CAM messages.
Figure 4 shows these yields by type of traffic transmitted by C-UEs. This figure shows how RODEO offers better energy efficiency to V2V communications than the rest of the methodologies, this is important since CAMs are periodic messages that are sent many more times than the rest of messages.
Figure 5 shows how RODEO is the methodology that offers the best energy efficiency in scenarios 1 to 4 in which VUEs predominate. This is so because RODEO is a methodology designed for a scenario where there is a considerable density of vehicles. This figure also shows that the worst energy efficiency value of RODEO is reached in scenario 5 where the same amount of V-UEs as of C-UEs exists and, therefore, the interference generated between communications is greater. And besides, it makes sense that from scenario 5 up to scenario 9, the overlay solution offers better energy efficiency than RODEO, since the overlay solution does not cause interference due to resource sharing. On the other hand, when compared to the Underlay solution, the energy efficiency offered by RODEO is potentially better.
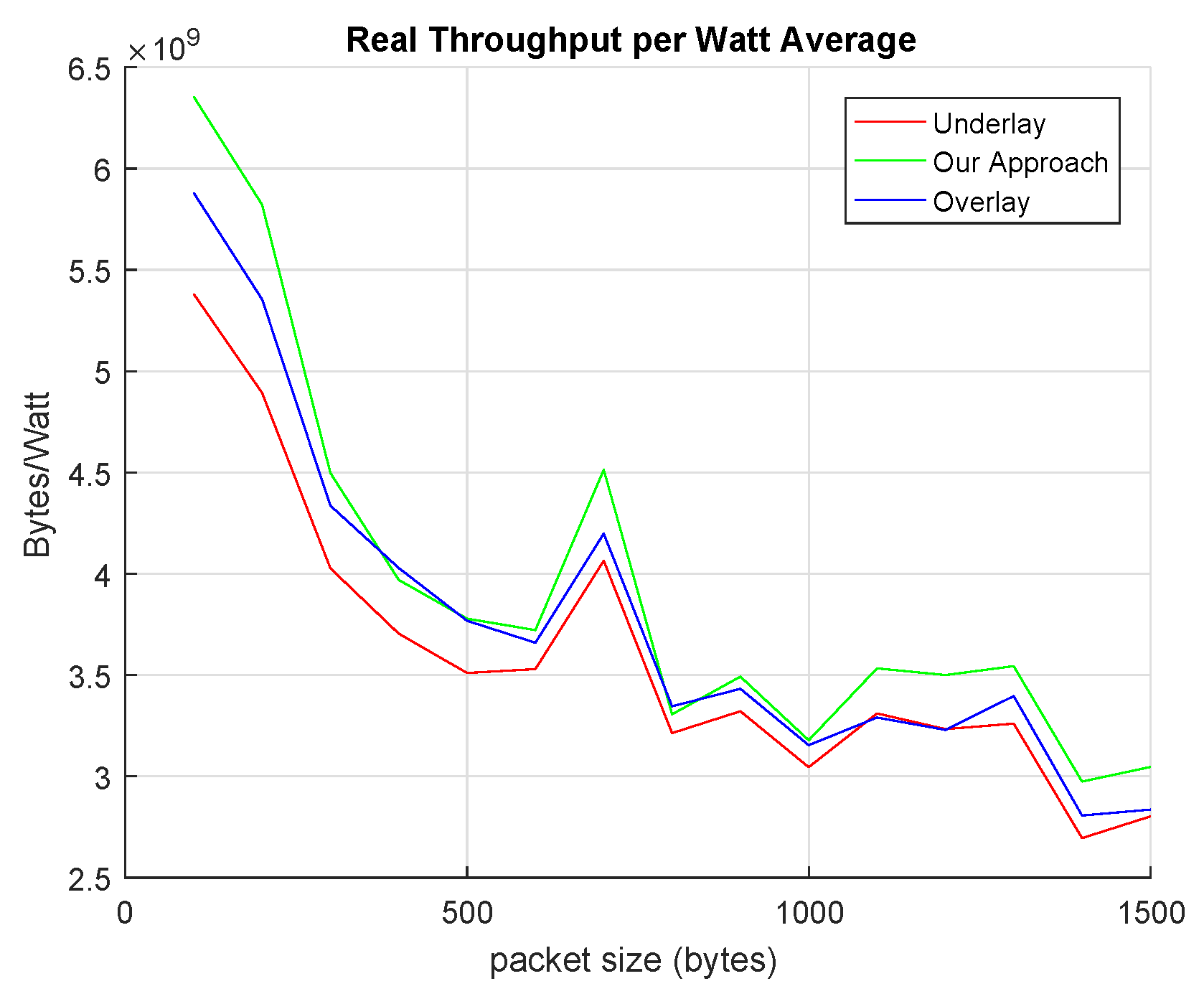
To conclude this analysis,
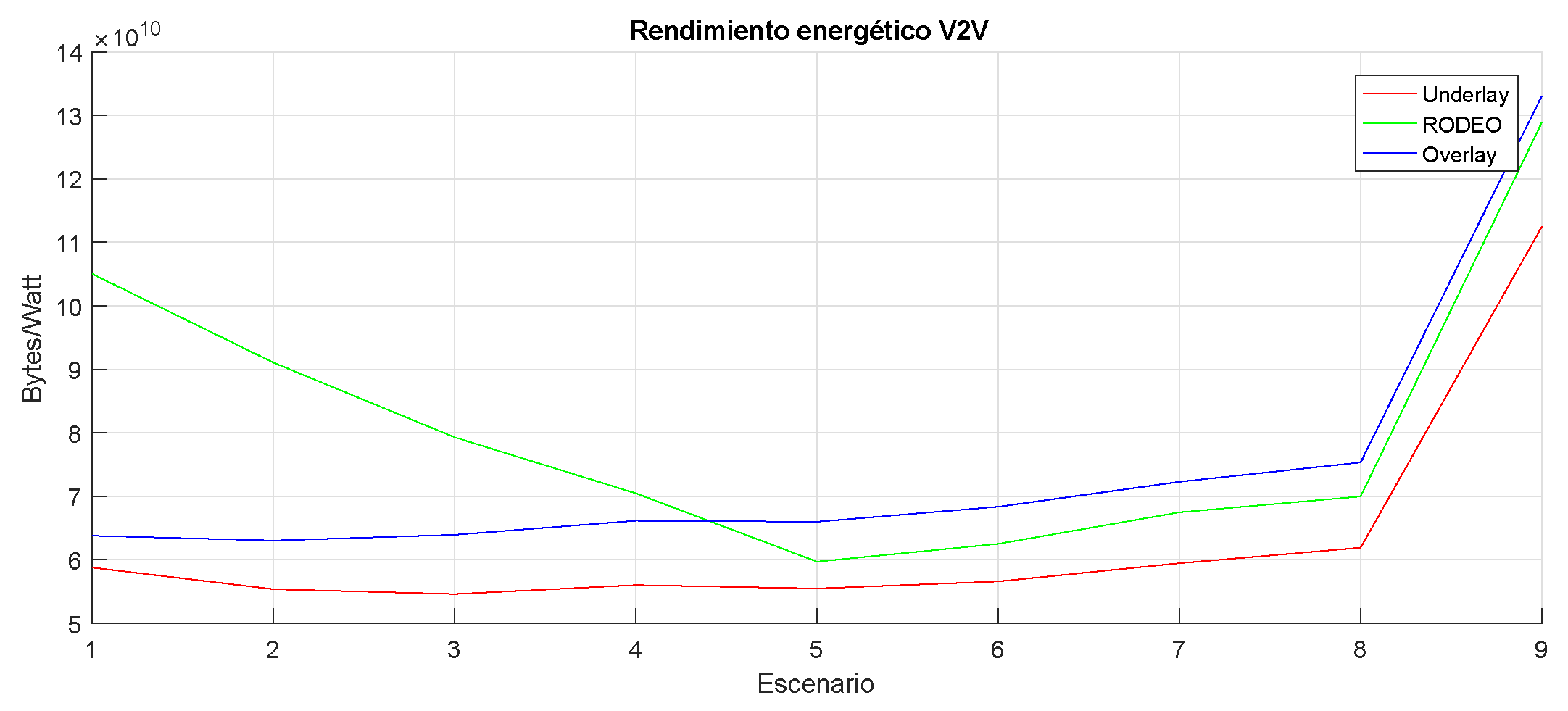
Figure 6 and
Figure 7 present the results of the total energy performance offered to all users by each of the methodologies.
Figure 6 shows the total energy efficiency of communications as a function of the amount of traffic transmitted by C-UEs. This figure shows how RODEO offers somewhat better results in many cases than the Overlay solution, although very similar. On the other hand, the Underlay solution is the one that offers the worst energy efficiency for all communications. This figure shows that total energy efficiency follows a downward trend as the traffic generated by C-UEs increases. That is, the energy efficiency of the overall communications package is at its highest when C-UEs transmit little traffic and, conversely, performance worsens as these packages grow.
Figure 7 represents the total energy efficiency as a function of the C-UEs/V-UEs ratio in the scenarios assessed. In this case, energy efficiency decreases as the number of C-UEs increases and the number of V-UEs decreases. It is also noted that in most of the scenarios, the energy efficiency offered by RODEO is somewhat higher than that offered by the other two methodologies analysed.
7. Conclusions and Future Work
In an environment such as VANET networks where the success of the deployed cooperative applications and services depends on the number of vehicles that have the ability to communicate with other vehicles and their environment, adapting the D2D approach for the establishment of V2V links has great advantages. Reducing latency in communications, as well as power transmission requirements are some of them.
But as it is indicated in this paper, the radio resources denoted as Resource Blocks (RB) are limited. In this context, when vehicles are considered as moving sensors with access and connectivity through the mobile network, it is necessary to deploy mechanisms that allow efficient use of these resources, using techniques known as RRM (Radio Resource Management). RODEO is presented in this work as a novel and sucessful methodology that allow vehicles to share RB with regular cellular users to stablish V2V links in the scope of predifined clusters. As in common sensor networks, power efficiency is mandatory in order to save batteries and also to avoid spectrum over traffic and saturation. Then, RODEO is evaluated since this perspective compararint it with underlay and overlay methodologies.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}