Novel 3D-Printed MEMS Magnetometer with Optical Detection †

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
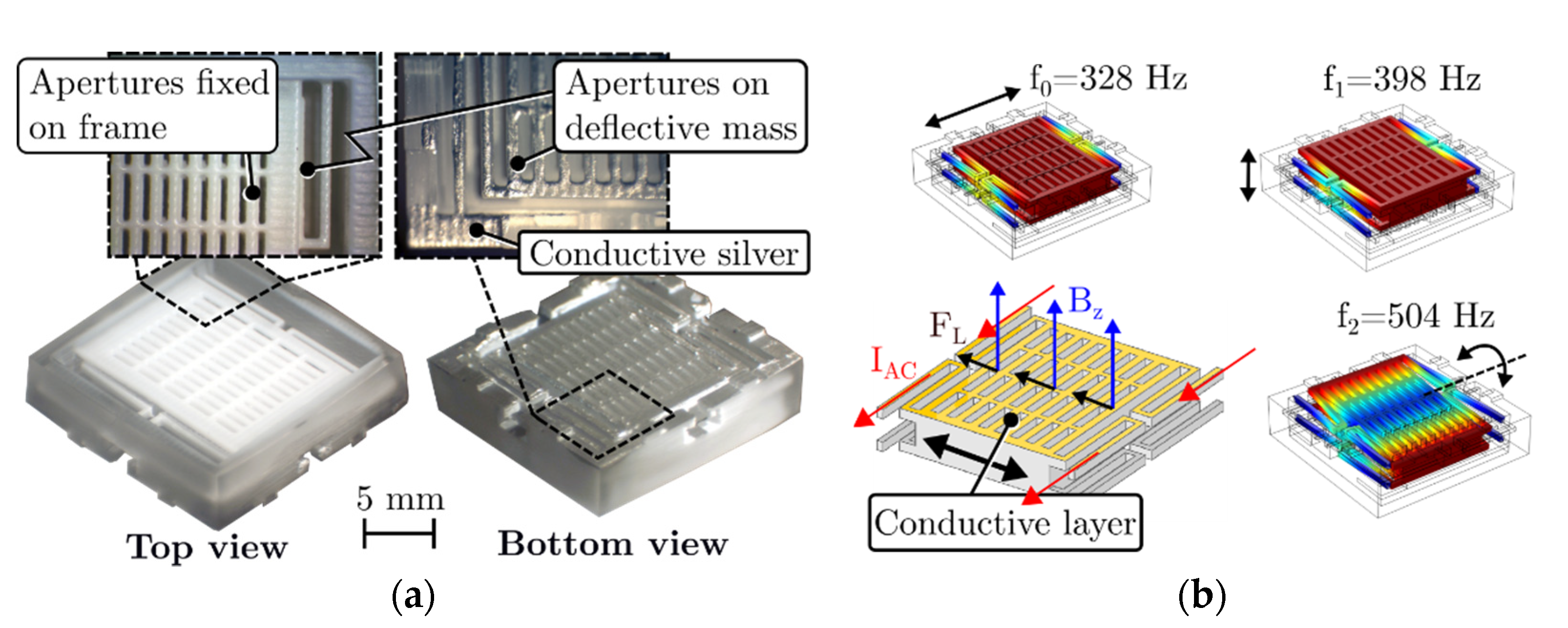
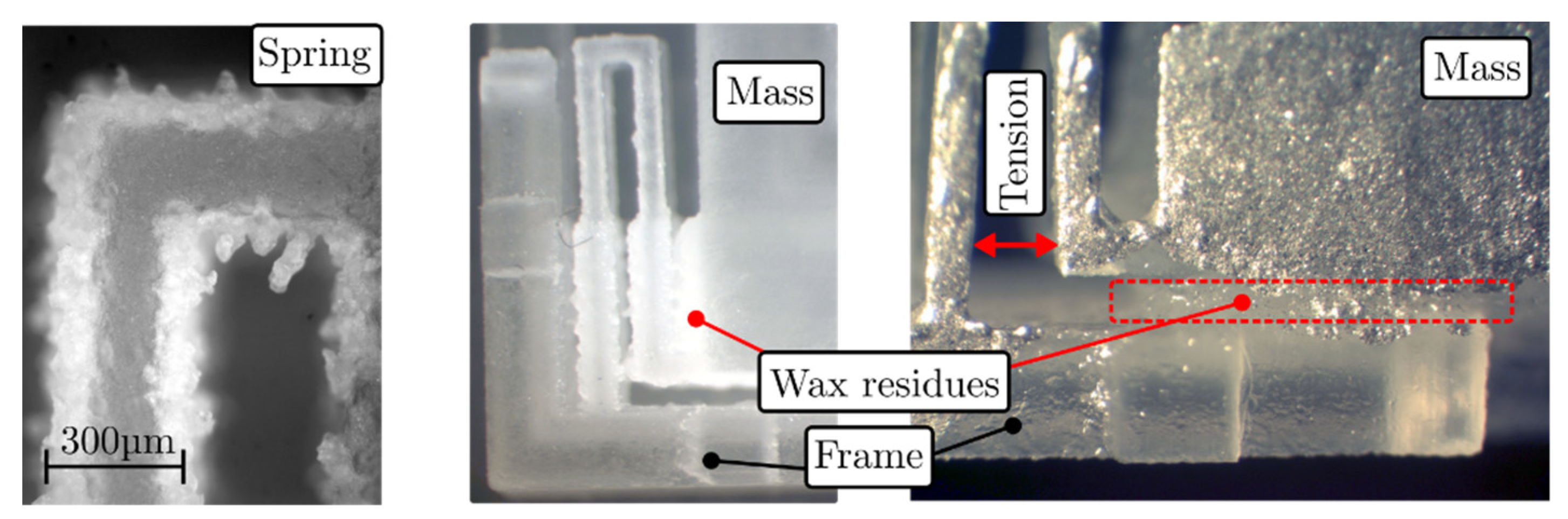
2. Sensing Principle and Fabrication
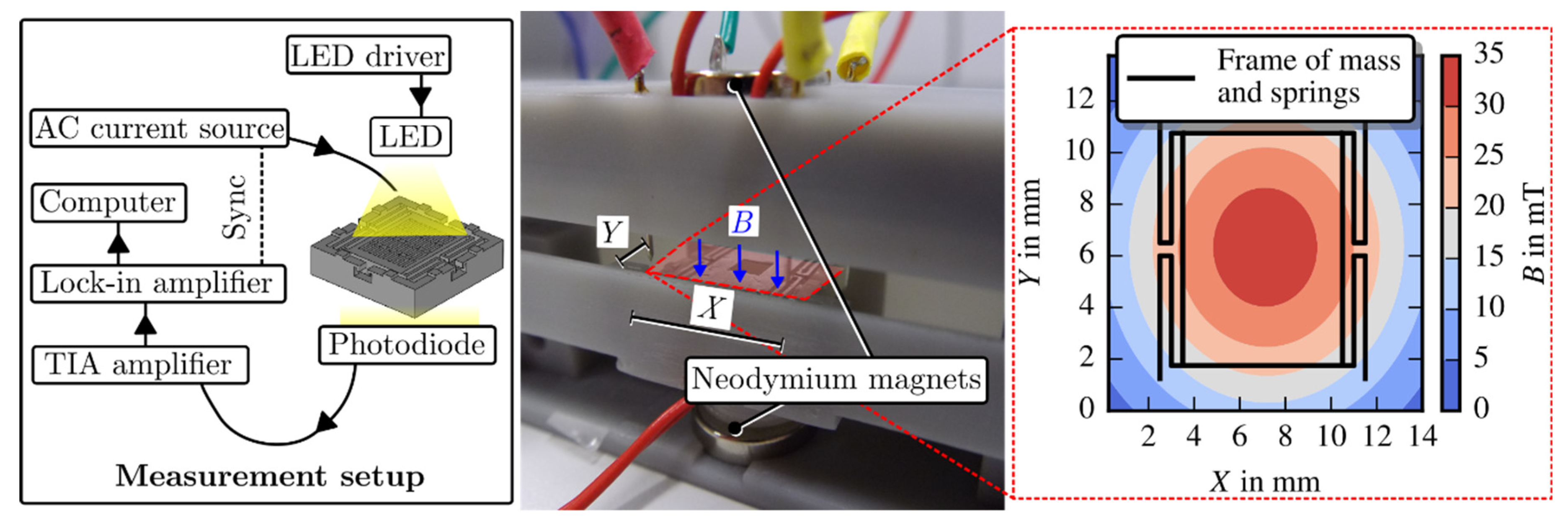
3. Measurement Set-Up
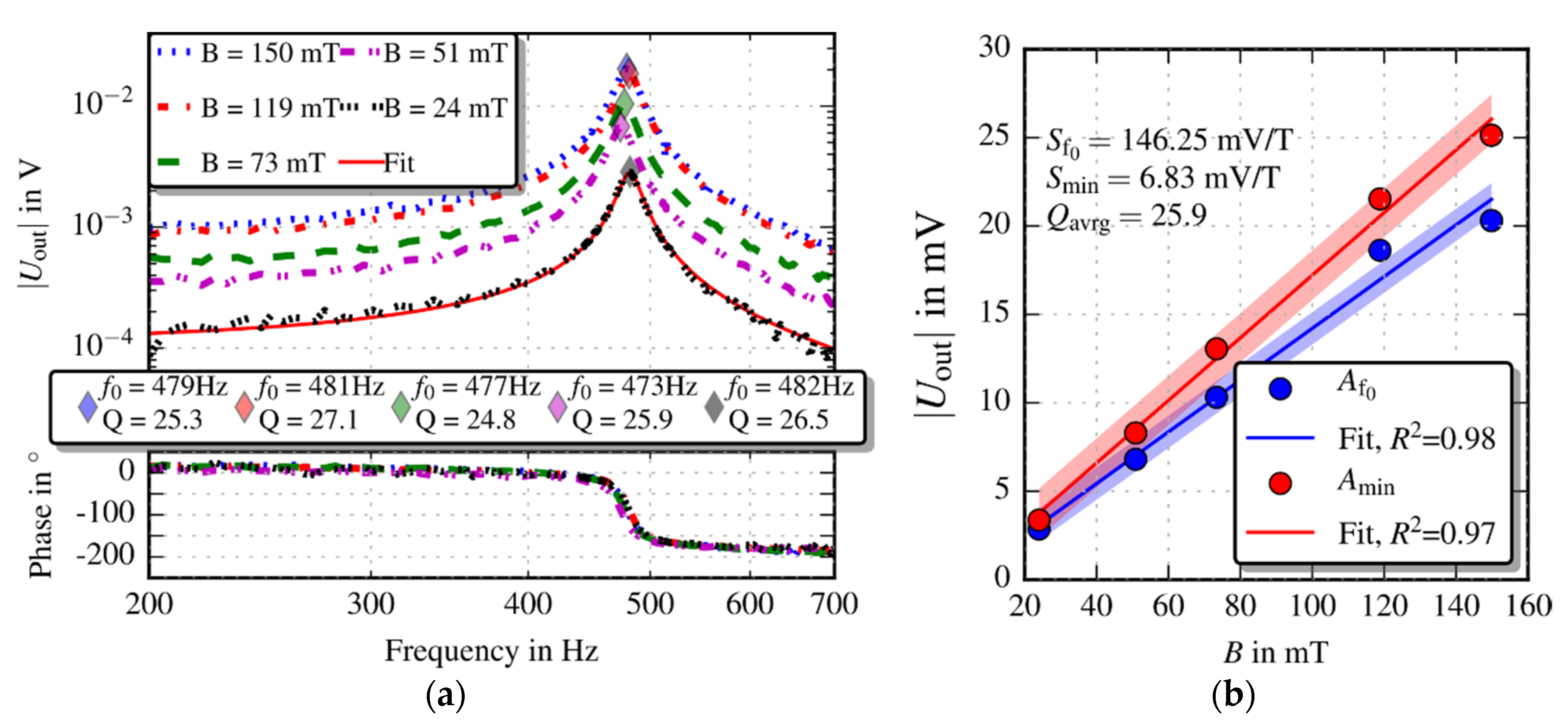
4. Results
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Lifton, V.A.; Lifton, G.; Simon, S. Options for additive rapid prototyping methods (3D printing) in MEMS technology. Rapid Prototyp. J. 2014, 20, 403–412. [Google Scholar] [CrossRef]
- Fischer, A.C.; Mäntysalo, M.; Niklaus, F. Chapter 26—Inkjet Printing, Laser-Based Micromachining and Micro 3D Printing Technologies for MEMS. In Handbook of Silicon Based MEMS Materials and Technologies, 2nd ed.; William Andrew Publishing: Norwich, NY, USA, 2015; pp. 550–564. [Google Scholar] [CrossRef]
- Dahle, R.; Rasel, R. 3D Printing as an Effective Educational Tool for MEMS Design and Fabrication. IEEE Trans. Educ. 2016, 59, 210–215. [Google Scholar] [CrossRef]
- Herrera-May, A.; Soler-Balcazar, J.; Vázquez-Leal, H.; Martínez-Castillo, J.; Vigueras-Zuñiga, M.; Aguilera-Cortés, L. Recent Advances of MEMS Resonators for Lorentz Force Based Magnetic Field Sensors: Design, Applications and Challenges. Sensors 2016, 16, 1359. [Google Scholar] [CrossRef] [PubMed]
- Hortschitz, W.; Steiner, H.; Sachse, M.; Stifter, M.; Kohl, F.; Schalko, J.; Jachimowicz, A.; Keplinger, F.; Sauter, T. Robust Precision Position Detection with an Optical MEMS Hybrid Device. IEEE Trans. Ind. Electron. 2012, 59, 4855–4862. [Google Scholar] [CrossRef]
- Hortschitz, W.; Steiner, H.; Stifter, M.; Kohl, F.; Kahr, M.; Kainz, A.; Raffelsberger, T.; Keplinger, F. Novel high resolution MOEMS inclination sensor. In Proceedings of the 2014 IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1893–1896. [Google Scholar] [CrossRef]
- Hortschitz, W.; Steiner, H.; Stifter, M.; Kainz, A.; Kohl, F.; Siedler, C.; Schalko, J.; Keplinger, F. Novel MOEMS Lorentz Force Transducer for Magnetic Fields. Procedia Eng. 2016, 168, 680–683. [Google Scholar] [CrossRef]
- Kahr, M. Design and Characterisation of 3D-Printed Magnetic Field Sensors. Master’s Thesis, TU Wien, Vienna, Austria, 2017. Available online: http://katalog.ub.tuwien.ac.at/AC14477184 (accessed on 1 April 2018).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kahr, M.; Hortschitz, W.; Steiner, H.; Stifter, M.; Kainz, A.; Keplinger, F. Novel 3D-Printed MEMS Magnetometer with Optical Detection. Proceedings 2018, 2, 783. https://doi.org/10.3390/proceedings2130783
Kahr M, Hortschitz W, Steiner H, Stifter M, Kainz A, Keplinger F. Novel 3D-Printed MEMS Magnetometer with Optical Detection. Proceedings. 2018; 2(13):783. https://doi.org/10.3390/proceedings2130783
Chicago/Turabian StyleKahr, Matthias, Wilfried Hortschitz, Harald Steiner, Michael Stifter, Andreas Kainz, and Franz Keplinger. 2018. "Novel 3D-Printed MEMS Magnetometer with Optical Detection" Proceedings 2, no. 13: 783. https://doi.org/10.3390/proceedings2130783
APA StyleKahr, M., Hortschitz, W., Steiner, H., Stifter, M., Kainz, A., & Keplinger, F. (2018). Novel 3D-Printed MEMS Magnetometer with Optical Detection. Proceedings, 2(13), 783. https://doi.org/10.3390/proceedings2130783