MOEMS Based Single Chip Lorentz Force Magnetic Gradiometer †

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
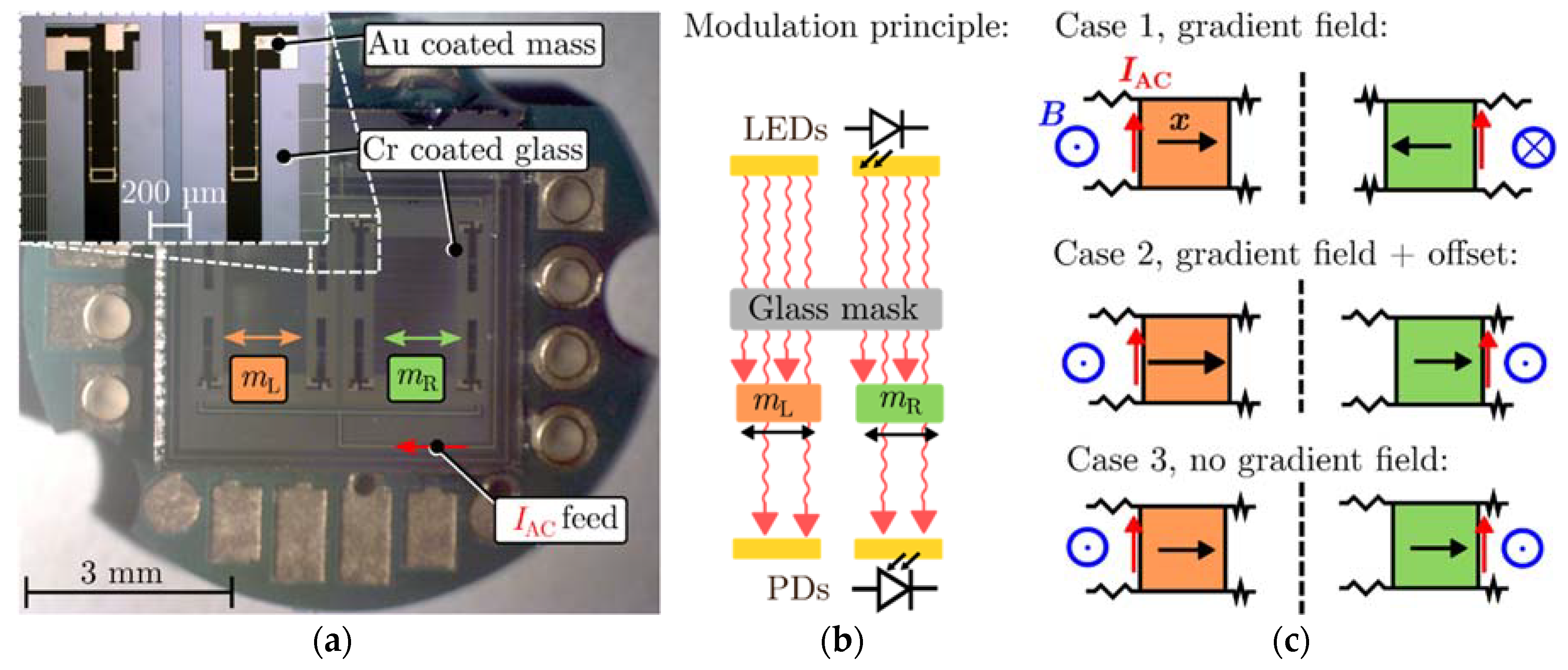
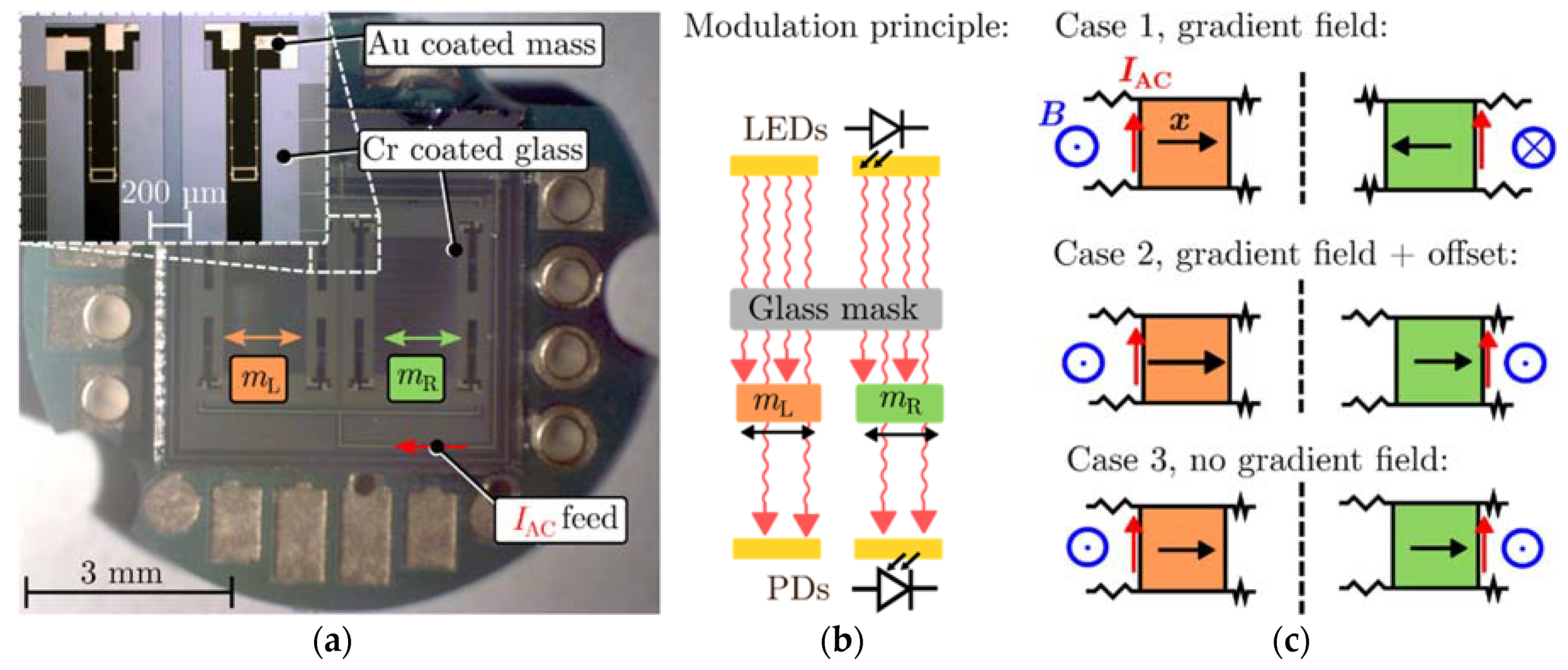
2. Sensing Principle
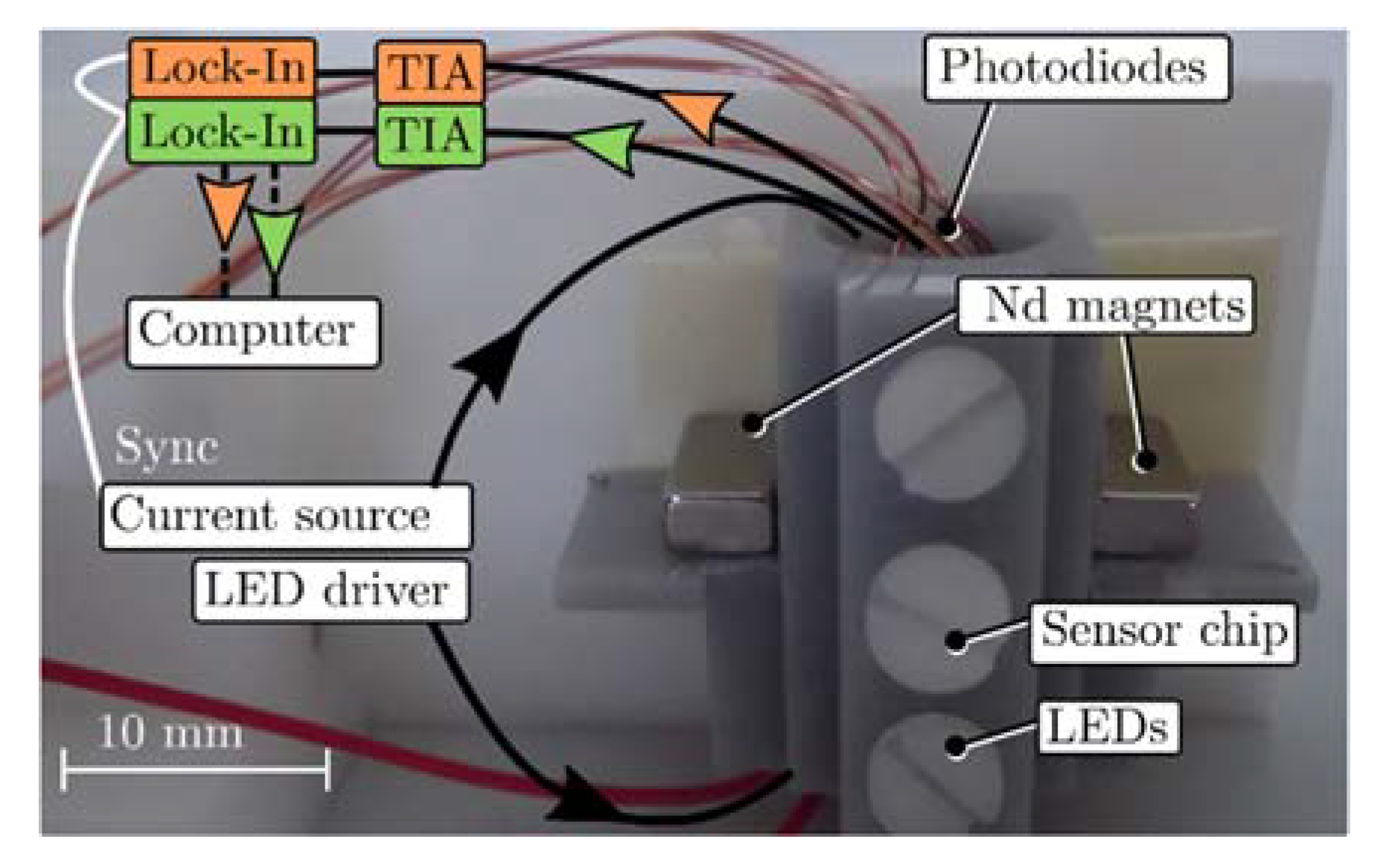
3. Measurement Set-Up
4. Results
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Salem, A.; Hamada, T.; Asahina, J.K.; Ushijima, K. Detection of unexploded ordnance (UXO) using marine magnetic gradiometer data. Explor. Geophys. 2005, 36, 97–103. [Google Scholar] [CrossRef]
- Lucas, I.; Michelena, M.D.; del Real, R.P.; de Manuel, V.; Plaza, J.A.; Duch, M.; Esteve, J.; Guerrero, H. A New Single-Sensor Magnetic Field Gradiometer. Sens. Lett. 2009, 7, 563–570. [Google Scholar] [CrossRef]
- Stifter, M.; Steiner, H.; Hortschitz, W.; Sauter, T.; Glatzl, T.; Dabsch, A.; Keplinger, F. MEMS micro-wire magnetic field detection method at CERN. IEEE Sens. 2015, 7, 1–4. [Google Scholar] [CrossRef]
- Hortschitz, W.; Steiner, H.; Stifter, M.; Kainz, A.; Kohl, F.; Siedler, C.; Schalko, J.; Keplinger, F. Novel MOEMS Lorentz Force Transducer for Magnetic Fields. Procedia Eng. 2016, 168, 680–683. [Google Scholar] [CrossRef]
- Hortschitz, W.; Steiner, H.; Sachse, M.; Stifter, M.; Kohl, F.; Schalko, J.; Jachimowicz, A.; Keplinger, F.; Sauter, T. Robust Precision Position Detection with an Optical MEMS Hybrid Device. IEEE Trans. Ind. Electron. 2012, 59, 4855–4862. [Google Scholar] [CrossRef]
- Hortschitz, W.; Steiner, H.; Stifter, M.; Kohl, F.; Kahr, M.; Kainz, A.; Raffelsberger, T.; Keplinger, F. Novel high resolution MOEMS inclination sensor. In Proceedings of the 2014 IEEE SENSORS, Valencia, Spain, 2–5 November 2014; pp. 1893–1896. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kahr, M.; Stifter, M.; Steiner, H.; Hortschitz, W.; Kovacs, G.; Kainz, A.; Schalko, J.; Keplinger, F. MOEMS Based Single Chip Lorentz Force Magnetic Gradiometer. Proceedings 2018, 2, 724. https://doi.org/10.3390/proceedings2130724
Kahr M, Stifter M, Steiner H, Hortschitz W, Kovacs G, Kainz A, Schalko J, Keplinger F. MOEMS Based Single Chip Lorentz Force Magnetic Gradiometer. Proceedings. 2018; 2(13):724. https://doi.org/10.3390/proceedings2130724
Chicago/Turabian StyleKahr, Matthias, Michael Stifter, Harald Steiner, Wilfried Hortschitz, Gabor Kovacs, Andreas Kainz, Johannes Schalko, and Franz Keplinger. 2018. "MOEMS Based Single Chip Lorentz Force Magnetic Gradiometer" Proceedings 2, no. 13: 724. https://doi.org/10.3390/proceedings2130724
APA StyleKahr, M., Stifter, M., Steiner, H., Hortschitz, W., Kovacs, G., Kainz, A., Schalko, J., & Keplinger, F. (2018). MOEMS Based Single Chip Lorentz Force Magnetic Gradiometer. Proceedings, 2(13), 724. https://doi.org/10.3390/proceedings2130724