Microcontroller-Based Seat Occupancy Detection and Classification †





{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
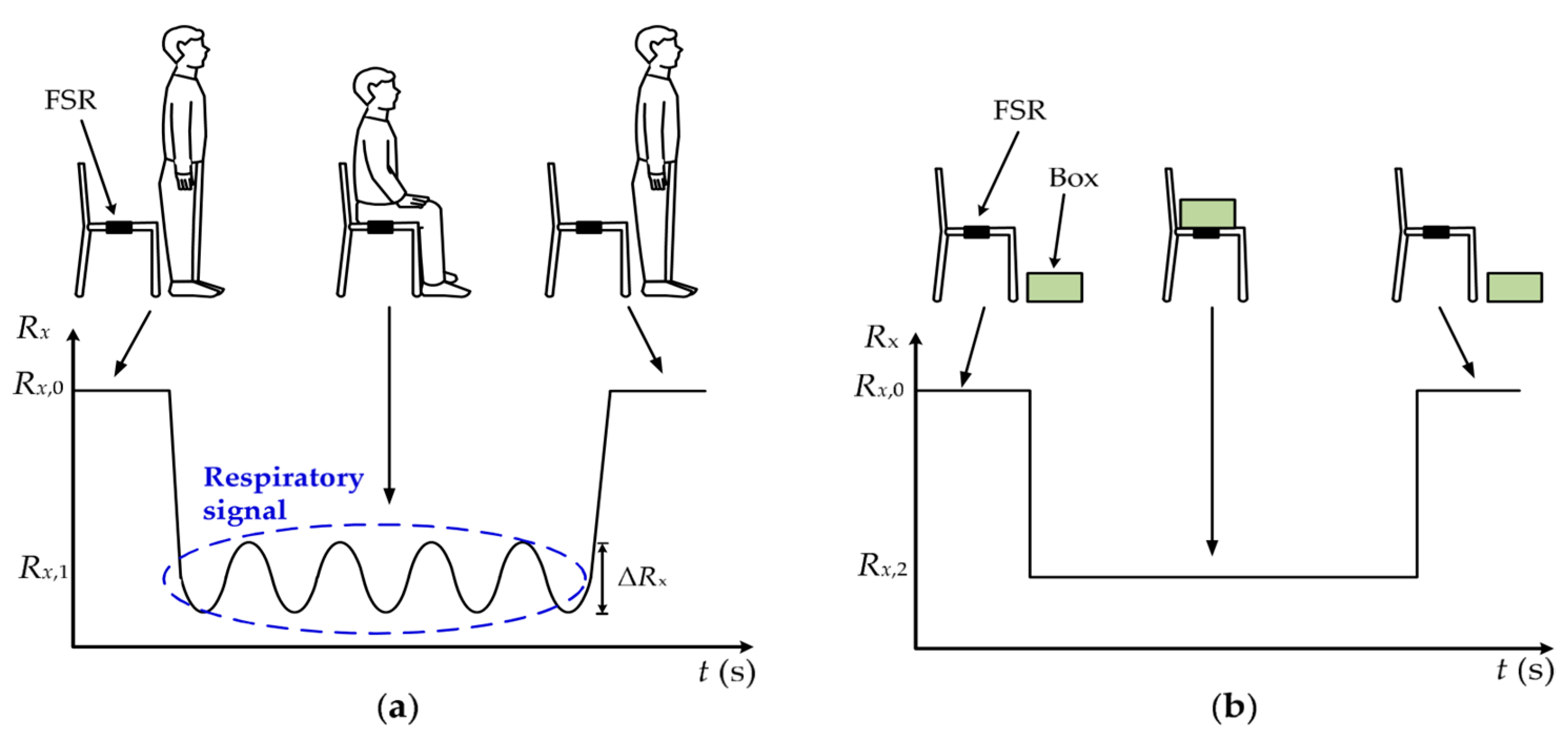
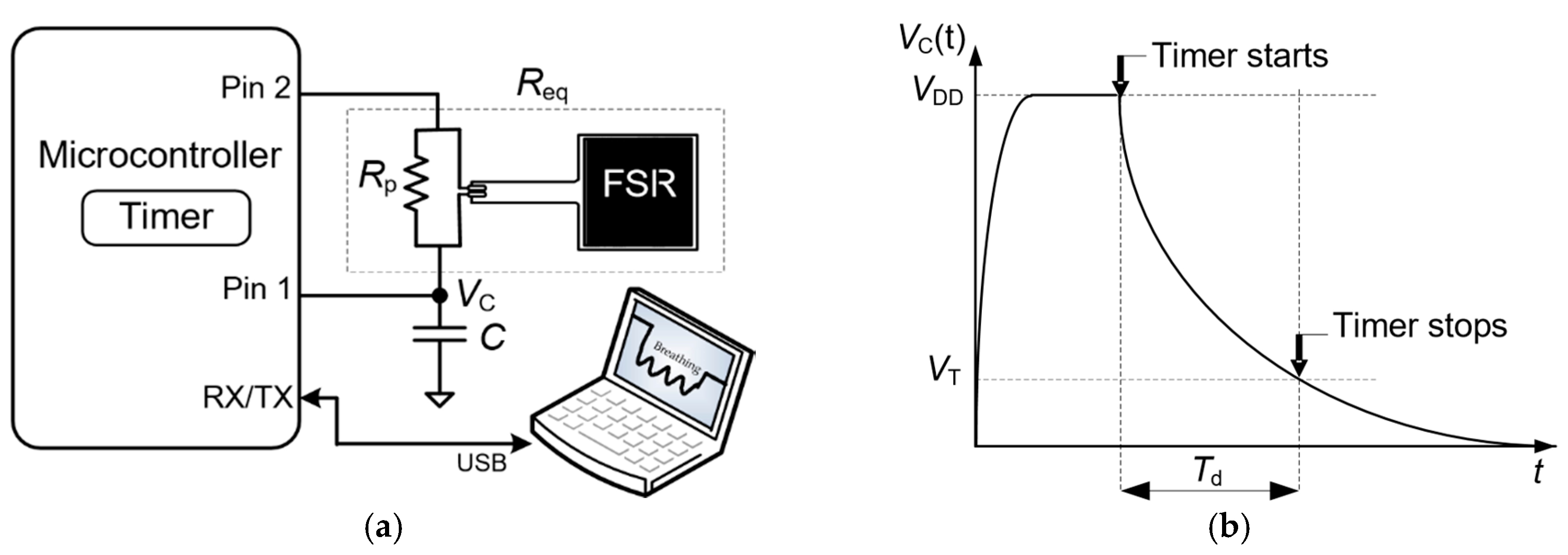
2. Operating Principle
3. Materials and Methods
4. Experimental Results
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Oestreicher, R.; Homann, M.; Lichtinger, H.; Morell, S.; Reich, D. Method and System for Determining Weight and Position of a Vehicle Seat Occupant. U.S. Patent 7082360, 25 July 2006. [Google Scholar]
- Böse, H.; Fuß, E.; Ehrlich, J. Capacitive sensor mats for pressure detection with high sensitivity. In Proceedings of the Sensor and Measurement Technology 2015, Nürnberg, Germany, 19–21 May 2015; pp. 55–60. [Google Scholar]
- Kisic, M.G.; Blaz, N.V.; Babkovic, K.B.; Zivanov, L.D.; Damnjanovic, M.S. Detection of seat occupancy using a wireless inductive sensor. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Breed, D.S.; DuVall, W.E.; Johnson, W.C. Dynamic Weight Sensing and Classification of Vehicular Occupants. U.S. Patent 7620521, 17 November 2009. [Google Scholar]
- Pallàs-Areny, R.; Casas-Piedrafita, J.O.; Gasulla-Forner, M.; Aliau-Bonet, C.; Gaitan-Pitre, J. Method and Apparatus for the Continuous Detection of Seat Occupancy through the Combined Use of Weight, Capacitive and Thermal Sensors. WO Patent 2011104399, 1 September 2011. [Google Scholar]
- George, B.; Zangl, H.; Bretterklieber, T.; Brasseur, G. A combined inductive–capacitive proximity sensor for seat occupancy detection. IEEE Trans. Instrum. Meas. 2010, 59, 1463–1470. [Google Scholar] [CrossRef]
- Roh, J.; Park, H.; Lee, K.J.; Hyeong, J.; Kim, S.; Lee, B. Sitting posture monitoring system based on a low-cost load cell using machine learning. Sensors 2018, 18, 208. [Google Scholar] [CrossRef] [PubMed]
- Pino, E.J.; Arias, D.E.; Aqueveque, P.; Vilugrón, L.; Hermosilla, D.; Curtis, D.W. Monitoring technology for wheelchair users with advanced multiple sclerosis. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Osaka, Japan, 3–7 July 2013; pp. 961–964. [Google Scholar]
- Griffiths, E.; Scott, T.; Bernheim, A.J. Health chair: Implicitly sensing heart and respiratory rate. In Proceedings of the ACM Conference on Ubiquitous Computing, Seatle, WA, USA, 13–17 September 2014; pp. 661–671. [Google Scholar]
- Reverter, F. The art of directly interfacing sensors to microcontrollers. J. Low Power Electron. Appl. 2012, 2, 265–281. [Google Scholar] [CrossRef]
- Reverter, F.; Jordana, J.; Gasulla, M.; Pallàs-Areny, R. Accuracy and resolution of direct resistive sensor-to-microcontroller interfaces. Sens. Actuators A Phys. 2005, 121, 78–87. [Google Scholar] [CrossRef]
- Reverter, F.; Casas, O. Interfacing differential resistive sensors to microcontrollers: A direct approach. IEEE Trans. Instrum. Meas. 2009, 58, 3405–3410. [Google Scholar] [CrossRef]
- Sifuentes, E.; Casas, O.; Reverter, F.; Pallas-Areny, R. Direct interface circuit to linearise resistive sensor bridges. Sens. Actuators A Phys. 2008, 147, 210–215. [Google Scholar]
- Reverter, F.; Horak, G.; Bilas, V.; Gasulla, M. Novel and low-cost temperature compensation technique for piezoresistive pressure sensors. In Proceedings of the XIX IMEKO World Congress, Lisbon, Portugal, 6–11 September 2009; pp. 2084–2087. [Google Scholar]
- Reverter, F.; Casas, O. Direct interface circuit for capacitive humidity sensors. Sens. Actuators A Phys. 2008, 143, 315–322. [Google Scholar] [CrossRef]
- Kokolanski, Z.; Jordana, J.; Gasulla, M.; Dimcev, V.; Reverter, F. Direct inductive sensor-to-microcontroller interface circuit. Sens. Actuators A Phys. 2015, 224, 185–191. [Google Scholar]
- Sifuentes, E.; Gonzalez-Landaeta, R.; Cota-Ruiz, J.; Reverter, F. Measuring dynamic signals with direct sensor-to-microcontroller interfaces applied to a magnetoresistive sensor. Sensors 2017, 17, 1150. [Google Scholar] [CrossRef] [PubMed]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sifuentes, E.; González-Landaeta, R.; Cota-Ruiz, J.; Reverter, F. Microcontroller-Based Seat Occupancy Detection and Classification. Proceedings 2018, 2, 1040. https://doi.org/10.3390/proceedings2131040
Sifuentes E, González-Landaeta R, Cota-Ruiz J, Reverter F. Microcontroller-Based Seat Occupancy Detection and Classification. Proceedings. 2018; 2(13):1040. https://doi.org/10.3390/proceedings2131040
Chicago/Turabian StyleSifuentes, Ernesto, Rafael González-Landaeta, Juan Cota-Ruiz, and Ferran Reverter. 2018. "Microcontroller-Based Seat Occupancy Detection and Classification" Proceedings 2, no. 13: 1040. https://doi.org/10.3390/proceedings2131040
APA StyleSifuentes, E., González-Landaeta, R., Cota-Ruiz, J., & Reverter, F. (2018). Microcontroller-Based Seat Occupancy Detection and Classification. Proceedings, 2(13), 1040. https://doi.org/10.3390/proceedings2131040