A Reversible Method to Characterize the Mass Sensitivity of a 3-Dof Mode Localized Coupled Resonator under Atmospheric Pressure †

Abstract
:1. Introduction
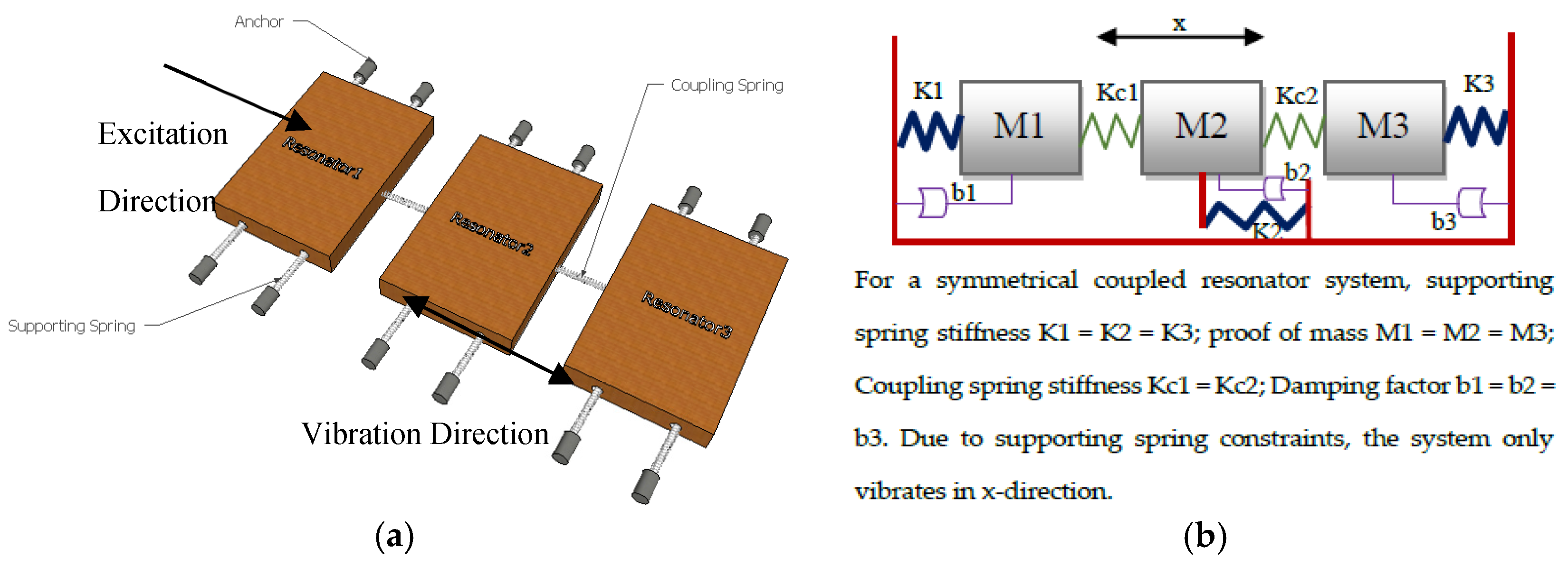
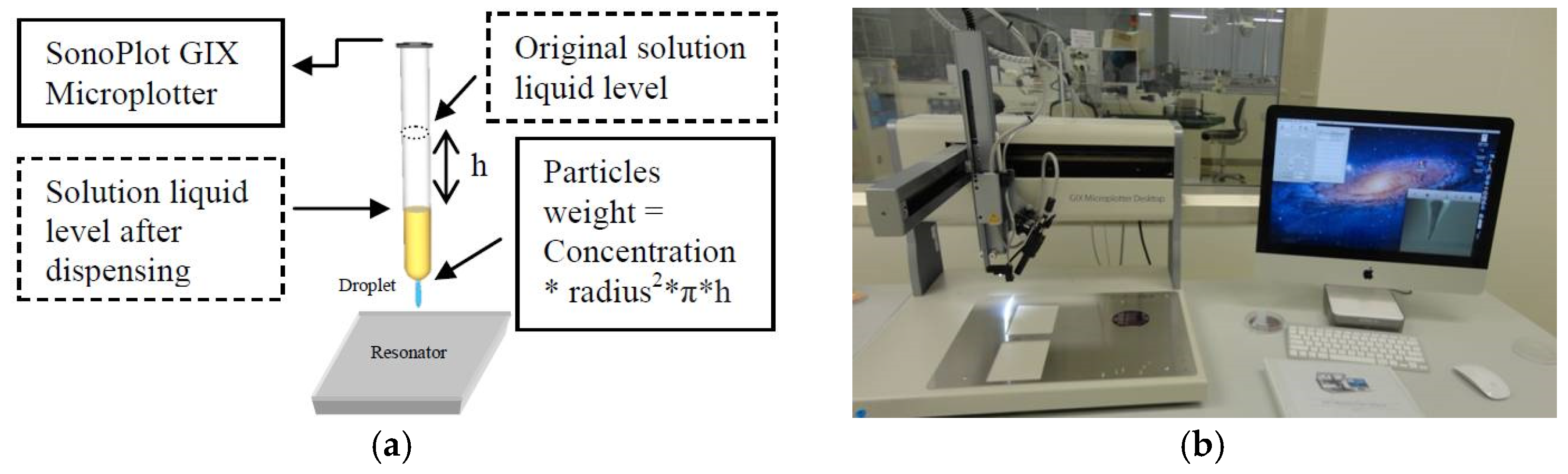
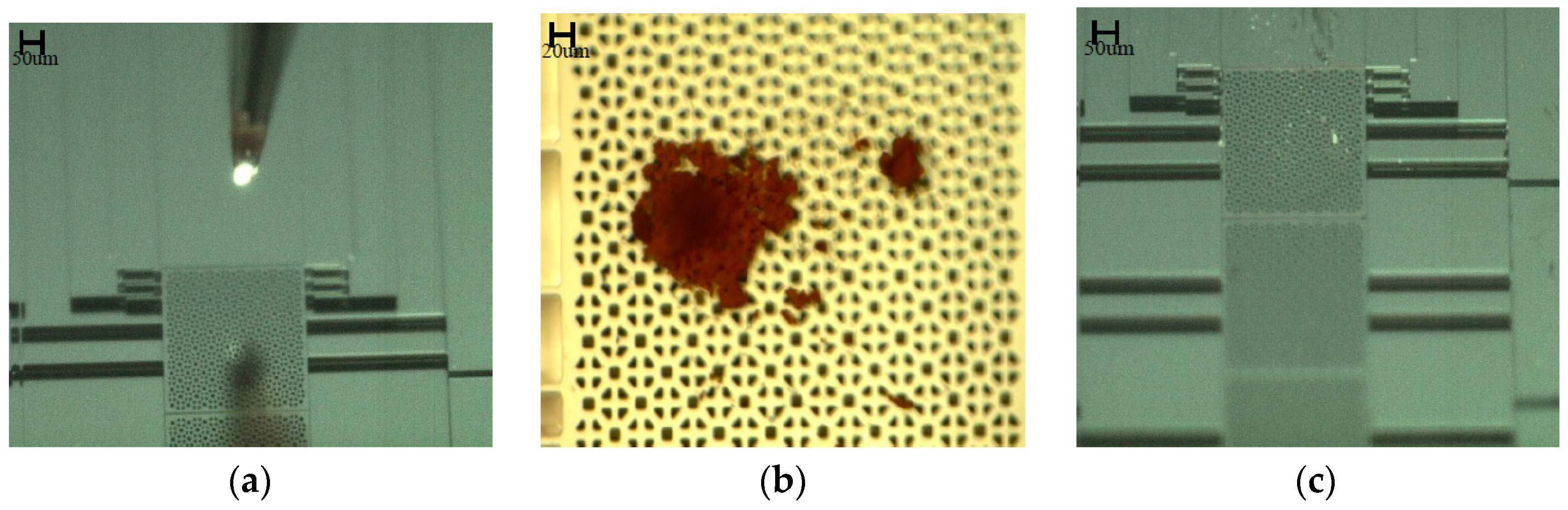
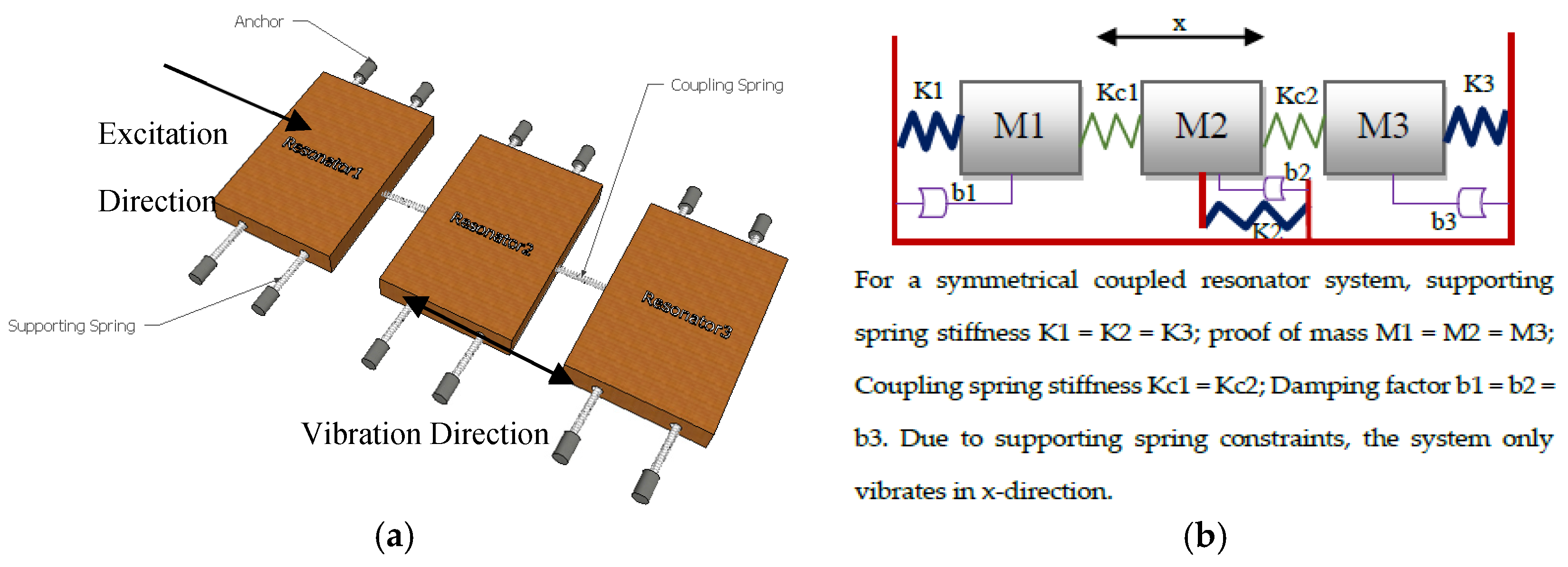
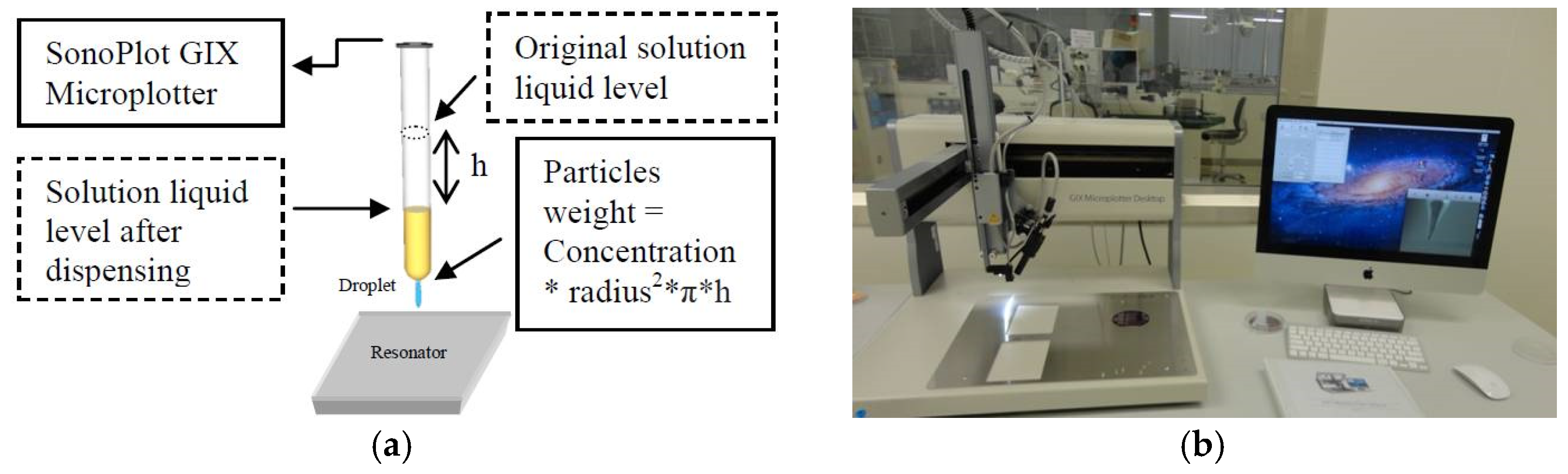
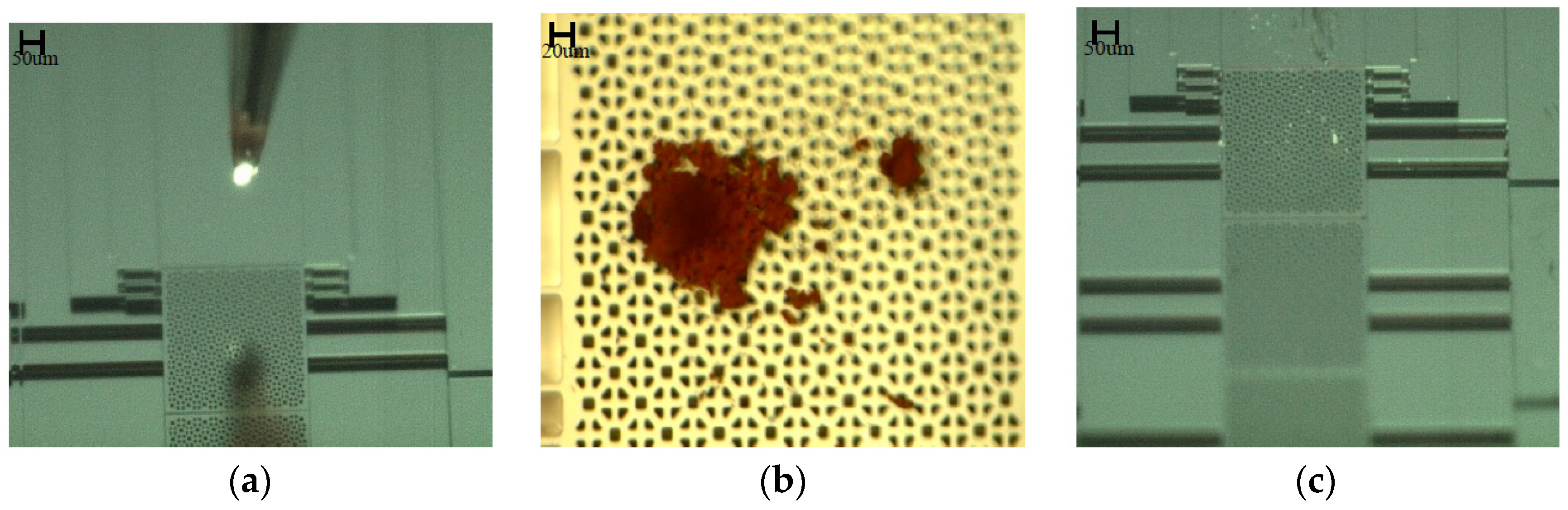
2. 3-DOF Coupled Resonator Chip and Methodology
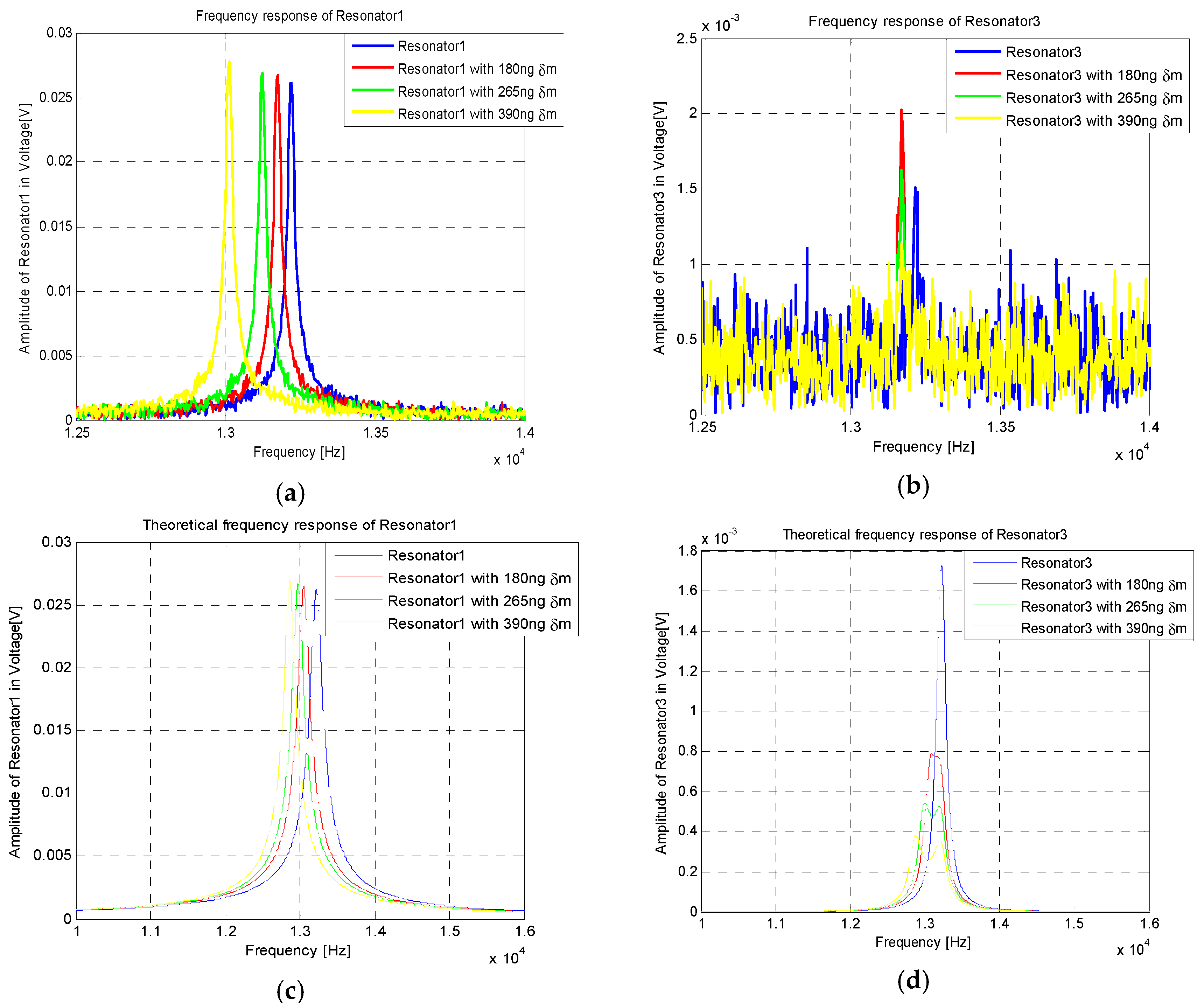
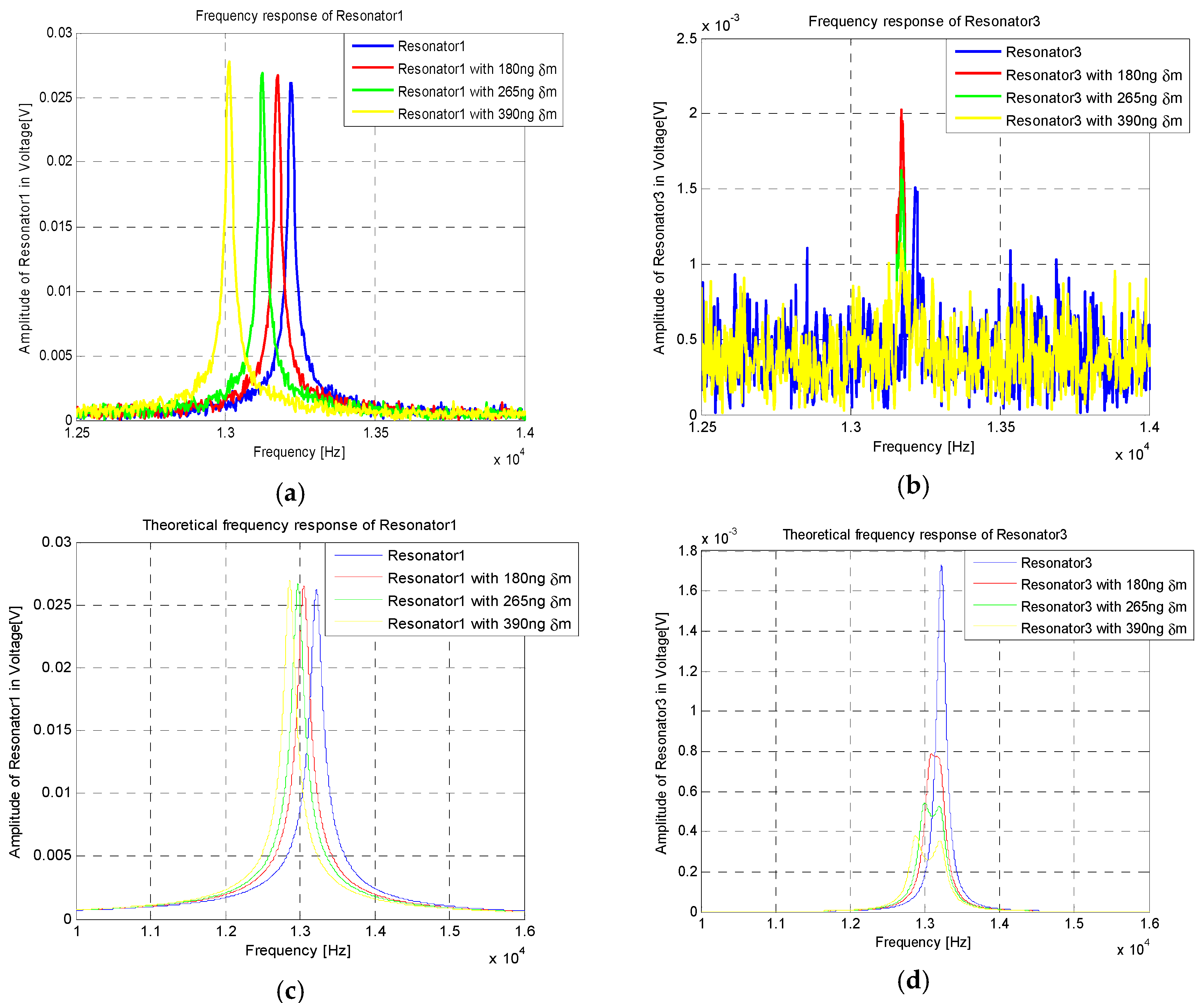
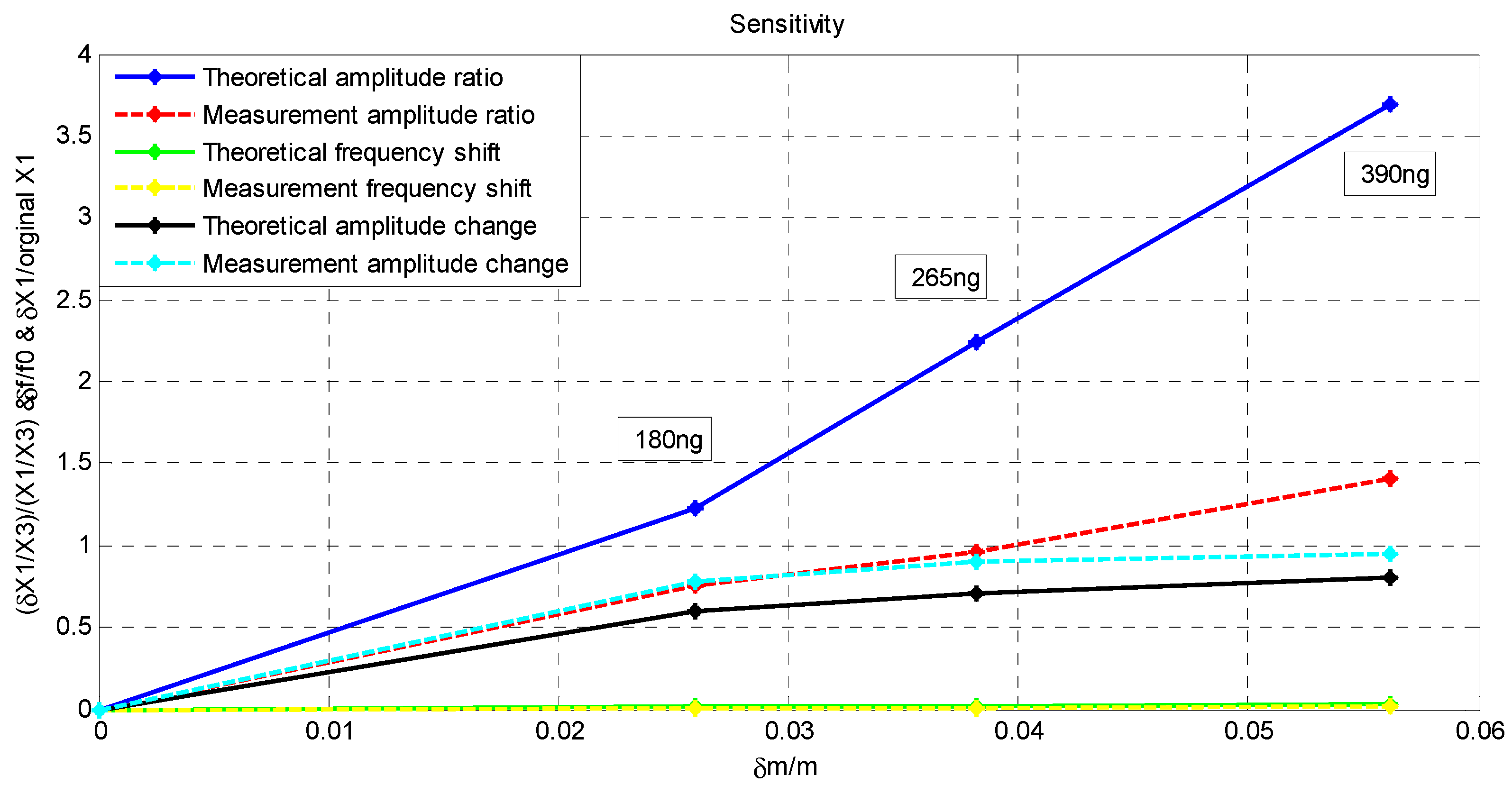
3. Results
4. Discussion
5. Conclusions
Conflicts of Interest
References
- Zhao, C.; Montaseri, M.H.; Wood, G.S.; Pu, S.H.; Seshia, A.A.; Kraft, M. A review on coupled MEMS resonators for sensing applications utilizing mode localization. Sens. Actuators A Phys. 2016, 249, 93–111. [Google Scholar] [CrossRef]
- Lin, A.T.-H.; Yan, J.; Seshia, A.A. Electrically addressed dual resonator sensing platform for biochemical detection. J. Microelectromech. Syst. 2012, 21, 34–43. [Google Scholar] [CrossRef]
- DeMartini, B.E.; Rhoads, J.F.; Shaw, S.W.; Turner, K.L. A single input-single output mass sensor based on a coupled array of microresonators. Sens. Actuators A Phys. 2007, 137, 147–156. [Google Scholar] [CrossRef]
- Zhao, C.; Wood, G.S.; Xie, J.; Chang, H.; Pu, S.H.; Chong, H.M.H.; Kraft, M. A sensor for stiffness change sensing based on three weakly coupled resonators with enhanced sensitivity. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems, Estoril, Portugal, 18–22 January 2015; pp. 881–884. [Google Scholar]
- Thiruvenkatanathan, P.; Yan, J.; Seshia, A.A. Common mode rejection in electrically coupled MEMS resonators utilizing mode localization for sensor applications. In Proceedings of the IEEE International Conference on Frequency Control Symposium (2009), Besancon, France, 20–24 April 2009; pp. 358–363. [Google Scholar]
- Zhao, C.; Wood, G.S.; Xie, J.; Chang, H.; Pu, S.H.; Kraft, M. A three degree-of-freedom weakly coupled resonator sensor with enhanced stiffness sensitivity. J. Microelectromech. Syst. 2016, 25, 38–51. [Google Scholar] [CrossRef]
- Montaseri, M.H.; Xie, J.; Chang, H.; Zhao, C.; Wood, G.; Kraft, M. Atmospheric pressure mode localization coupled resonators force sensor. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems, Transducers (2015), Anchorage, AK, USA, 21–25 June 2015; pp. 1183–1186. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
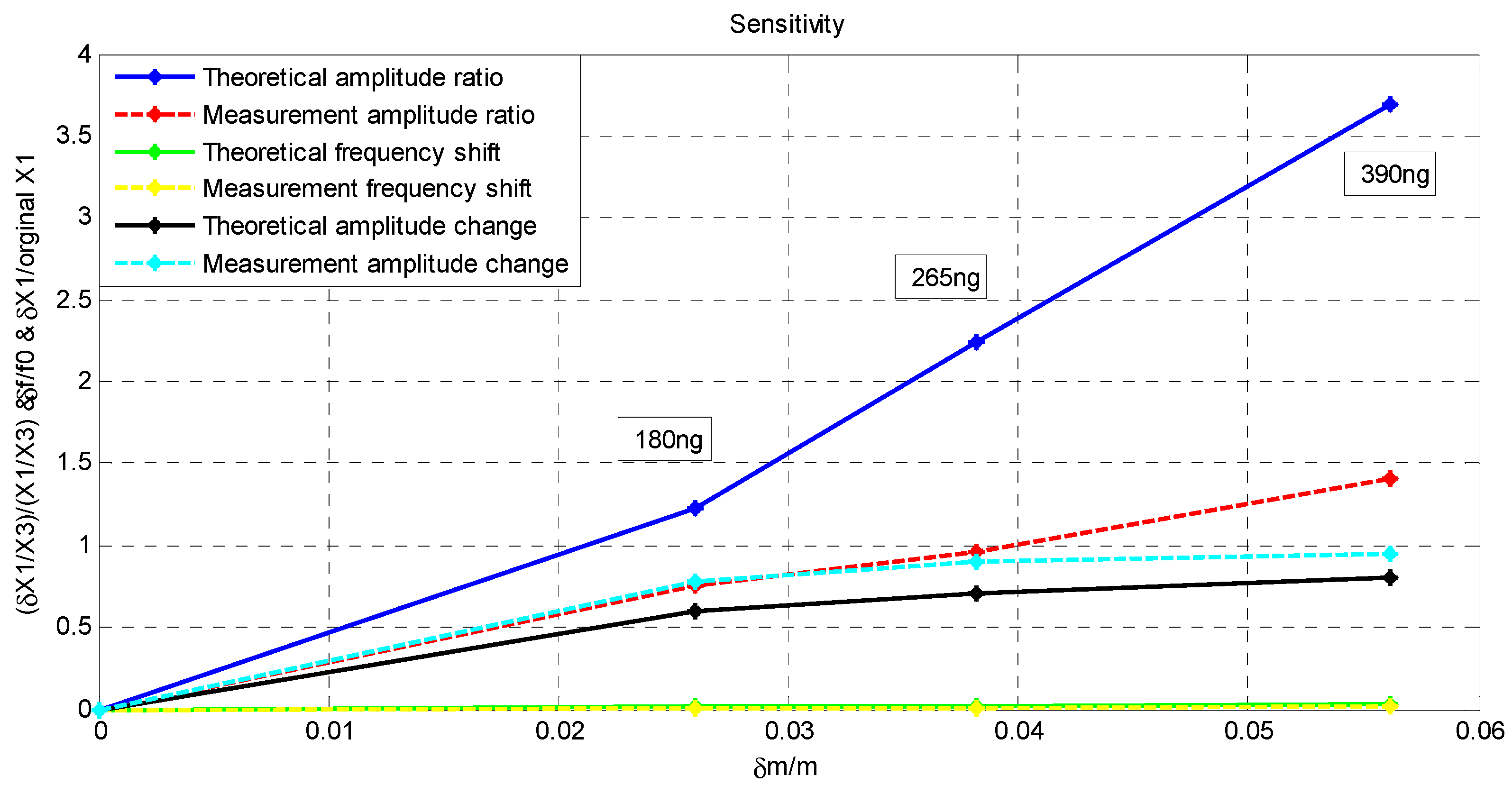
| Criteria | Value |
|---|---|
| Frequency Shift | 0.27 |
| Amplitude Ratio | 25.31 |
| Amplitude Change | 17.29 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhao, C.; Wang, C.; Cerica, D.; Baijot, M.; Pachkawade, V.; Ghorbani, A.; Boutier, M.; Vanderplasschen, A.; Kraft, M. A Reversible Method to Characterize the Mass Sensitivity of a 3-Dof Mode Localized Coupled Resonator under Atmospheric Pressure. Proceedings 2017, 1, 493. https://doi.org/10.3390/proceedings1040493
Wang Y, Zhao C, Wang C, Cerica D, Baijot M, Pachkawade V, Ghorbani A, Boutier M, Vanderplasschen A, Kraft M. A Reversible Method to Characterize the Mass Sensitivity of a 3-Dof Mode Localized Coupled Resonator under Atmospheric Pressure. Proceedings. 2017; 1(4):493. https://doi.org/10.3390/proceedings1040493
Chicago/Turabian StyleWang, Yuan, Chun Zhao, Chen Wang, Delphine Cerica, Mathieu Baijot, Vinayak Pachkawade, Ali Ghorbani, Maxime Boutier, Alain Vanderplasschen, and Michael Kraft. 2017. "A Reversible Method to Characterize the Mass Sensitivity of a 3-Dof Mode Localized Coupled Resonator under Atmospheric Pressure" Proceedings 1, no. 4: 493. https://doi.org/10.3390/proceedings1040493
APA StyleWang, Y., Zhao, C., Wang, C., Cerica, D., Baijot, M., Pachkawade, V., Ghorbani, A., Boutier, M., Vanderplasschen, A., & Kraft, M. (2017). A Reversible Method to Characterize the Mass Sensitivity of a 3-Dof Mode Localized Coupled Resonator under Atmospheric Pressure. Proceedings, 1(4), 493. https://doi.org/10.3390/proceedings1040493