Large Tilt Angle Lorentz Force Actuated Micro-Mirror with 3 DOF for Optical Applications †


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
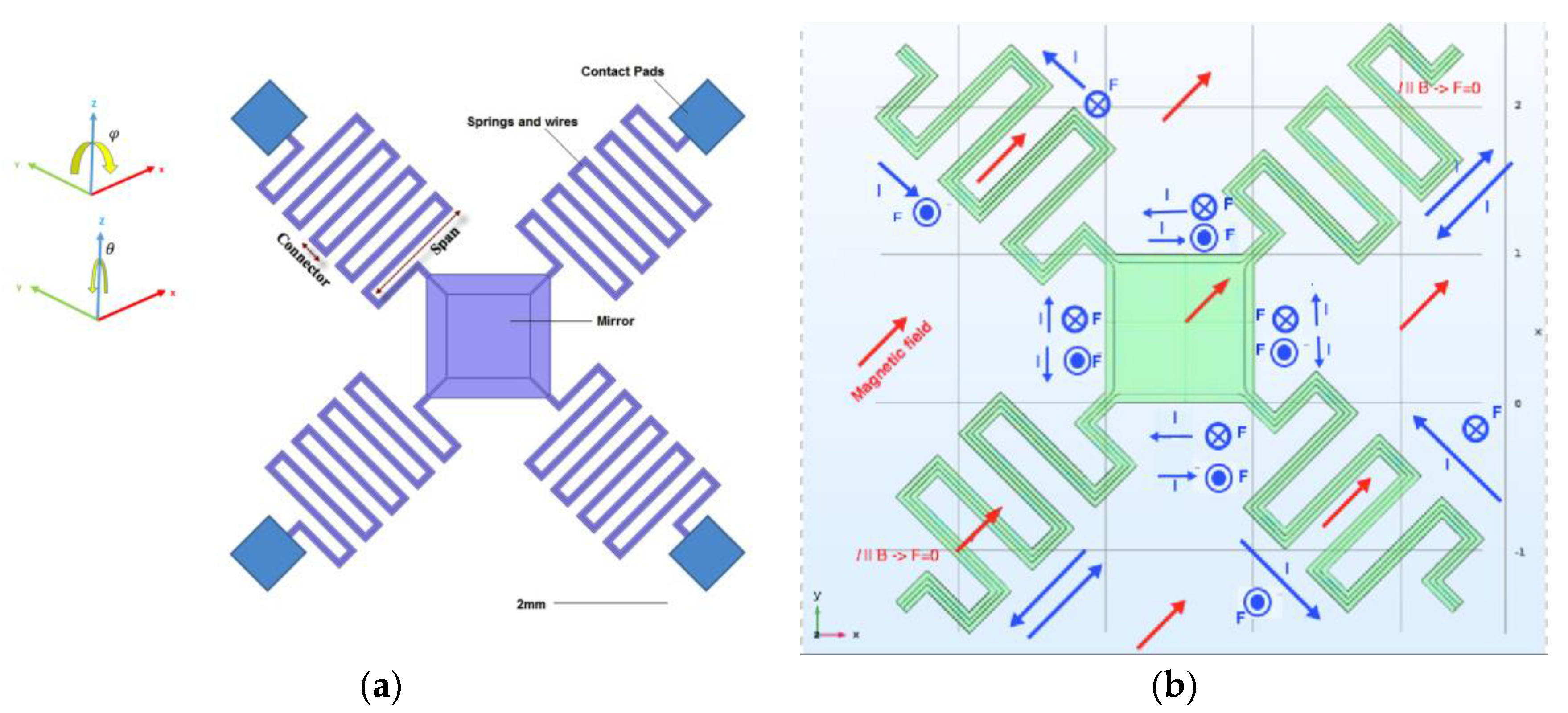
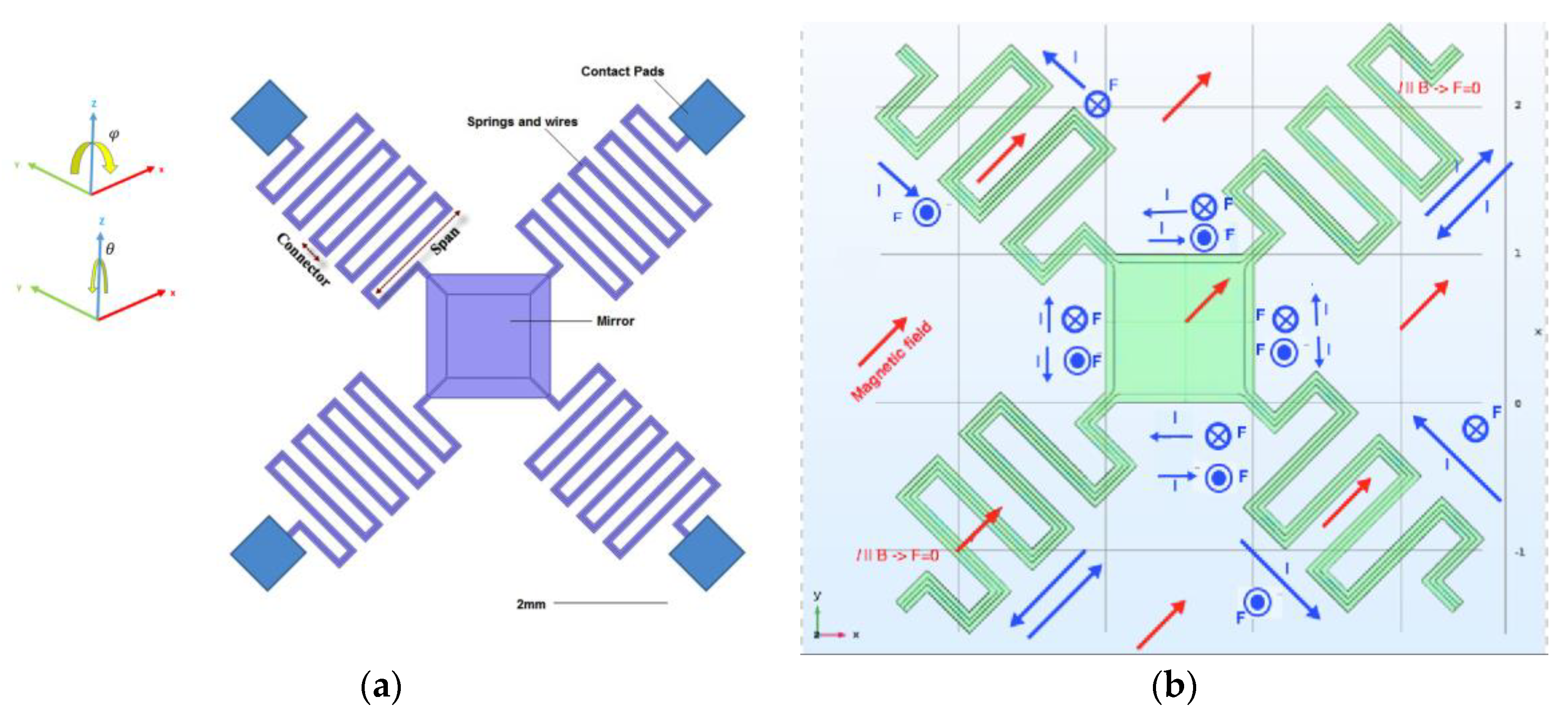
Mechanical Parameters Design
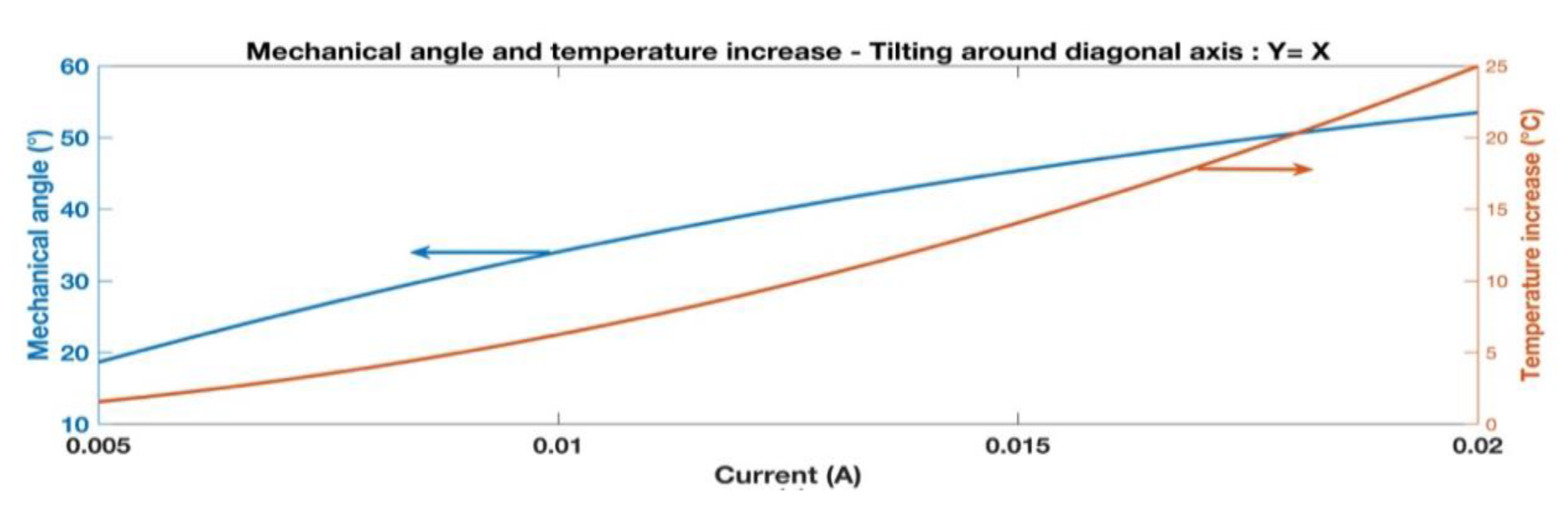
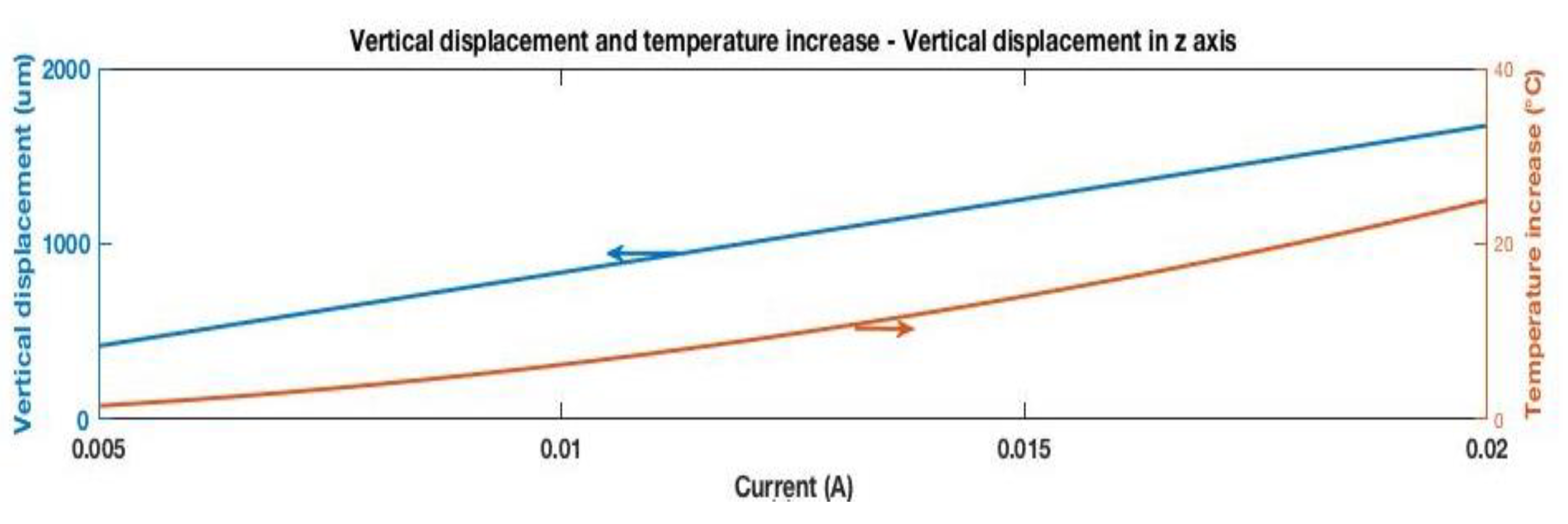
3. Results
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Dudley, D.; Duncan, W.; Slaughter, J. Emerging digital micromirror device (DMD) applications. In Proceedings of the MOEMS Display and Imaging Systems, San Jose, CA, USA, 20 January 2003; Volume 4985. [Google Scholar] [CrossRef]
- Lee, M.P.; Cooper, G.J.; Hinkley, T.; Gibson, G.M.; Padgett, M.J.; Cronin, L. Development of a 3D printer using scanning projection stereolithography. Sci. Rep. 2015, 9875. [Google Scholar] [CrossRef] [PubMed]
- Arablouei, R.; Goan, E.; Gensemer, S.; Kusy, B. Fast and robust pushbroom hyperspectral imaging via DMD-based scanning. In Proceedings of the Novel Optical Systems Design and Optimization XIX, San Diego, CA, USA, 28 August 2016; Volume 9948, p. 99480. [Google Scholar] [CrossRef]
- Kawajiri, Y.; Nemoto, N.; Yamamoto, T.; Yamaguchi, J.; Makihara, M.; Ishii, Y.; Sasakura, K.; Shimokawa, F. 512 × 512 port 3D MEMS optical switch module with toroidal concave mirror. NTT Tech. Rev. 2012, 10, 1–6. [Google Scholar]
- Xu, Y.; Singh, J.; Jason, T.H.; Ramakrishna, K.; Premchandran, C.S.; Kelvin, C.W.; Kuan, C.T.; Chen, N.; Olivo, M.C.; Sheppard, C.J. MEMS based non-rotatory circumferential scanning optical probe for endoscopic optical coherence tomography. In Proceedings of the European Conference on Biomedical Optics, Munich, Germany, 17 June 2007. [Google Scholar] [CrossRef]
- Aguirre, A.D.; Herz, P.R.; Chen, Y.; Fujimoto, J.G.; Piyawattanametha, W.; Fan, L.; Wu, M.C. Two-axis MEMS scanning catheter for ultrahigh resolution three-dimensional and en face imaging. Opt. Exp. 2007, 15, 2445–2453. [Google Scholar] [CrossRef] [PubMed]
- Park, B.; Afsharipour, E.; Chrusch, D.; Shafai, C.; Andersen, D.; Burley, G. Large Displacement Bi-Directional Out-of-Plane Lorentz Actuator Array for Surface Manipulation. J. Micromech. Microeng. 2017. [Google Scholar] [CrossRef]
- Raboud, D.; Barras, T.; Conte, F.L.; Fabre, L.; Kilcher, L.; Kechana, F.; Abelé, N.; Kayal, M. MEMS based color-VGA micro-projector system. In Proceedings of the Eurosensors XXIV, Linz, Austria, 5–8 September 2010. [Google Scholar] [CrossRef]
- Cho, A.R.; Han, A.; Ju, S.; Jeong, H.; Park, J.H.; Kim, I.; Bu, J.U.; Ji, C.H. Electromagnetic biaxial microscanner with mechanical amplification at resonance. Opt. Exp. 2015, 23, 16792–16802. [Google Scholar] [CrossRef] [PubMed]
- Baran, U.; Brown, D.; Holmstrom, S.; Balma, D.; Davis, W.O.; Muralt, P.; Urey, H. Resonant PZT MEMS scanner for high-resolution displays. J. Microelectromech. Syst. 2012, 21, 1303–1310. [Google Scholar] [CrossRef]
- Hung, A.C.; Lai, H.Y.; Lin, T.W.; Fu, S.G.; Lu, M.S. An electrostatically driven 2D micro-scanning mirror with capacitive sensing for projection display. Sens. Actuators A. Phys. 2015, 222, 122–129. [Google Scholar] [CrossRef]
- Cho, I.J.; Yoon, E. A low-voltage three-axis electromagnetically actuated micromirror for fine alignment among optical devices. J. Micromech. Microeng. 2009, 19, 085007. [Google Scholar] [CrossRef]
- Jia, K.; Samuelson, S.R.; Xie, H. High-Fill-Factor Micromirror array with hidden bimorph actuators and tip–tilt-piston capability. J. Microelectromech. Syst. 2011, 20, 573–582. [Google Scholar] [CrossRef]
- Morrison, J.; Imboden, M.; Little, T.D.; Bishop, D.J. Electrothermally actuated tip-tilt-piston micromirror with integrated varifocal capability. Opt. Exp. 2015, 23, 9555–9566. [Google Scholar] [CrossRef] [PubMed]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afsharipour, E.; Park, B.; Shafai, C. Large Tilt Angle Lorentz Force Actuated Micro-Mirror with 3 DOF for Optical Applications. Proceedings 2017, 1, 351. https://doi.org/10.3390/proceedings1040351
Afsharipour E, Park B, Shafai C. Large Tilt Angle Lorentz Force Actuated Micro-Mirror with 3 DOF for Optical Applications. Proceedings. 2017; 1(4):351. https://doi.org/10.3390/proceedings1040351
Chicago/Turabian StyleAfsharipour, Elnaz, Byoungyoul Park, and Cyrus Shafai. 2017. "Large Tilt Angle Lorentz Force Actuated Micro-Mirror with 3 DOF for Optical Applications" Proceedings 1, no. 4: 351. https://doi.org/10.3390/proceedings1040351
APA StyleAfsharipour, E., Park, B., & Shafai, C. (2017). Large Tilt Angle Lorentz Force Actuated Micro-Mirror with 3 DOF for Optical Applications. Proceedings, 1(4), 351. https://doi.org/10.3390/proceedings1040351