1. Introduction
The development of assisted and autonomous driving vehicles is currently making large progress. The key component for this technology is a reliable sensor network delivering precise information about the vehicle’s environment in real-time. The combination of several sensor types and measurement principles aims at making the network robust against glitches. One very promising sensor type is a ToF-based camera, which is capable of delivering information on the distance between the sensor and objects in its field of view [
1]. Here we investigate the influence of different rain intensities on the accuracy of distance measurements using a ToF camera. The rain influence was studied by optical raytracing simulations, as this strategy offers well-defined control of the parameters and test conditions.
2. Simulation Model
The 3D simulation model is based on geometrical optics raytracing using Zemax
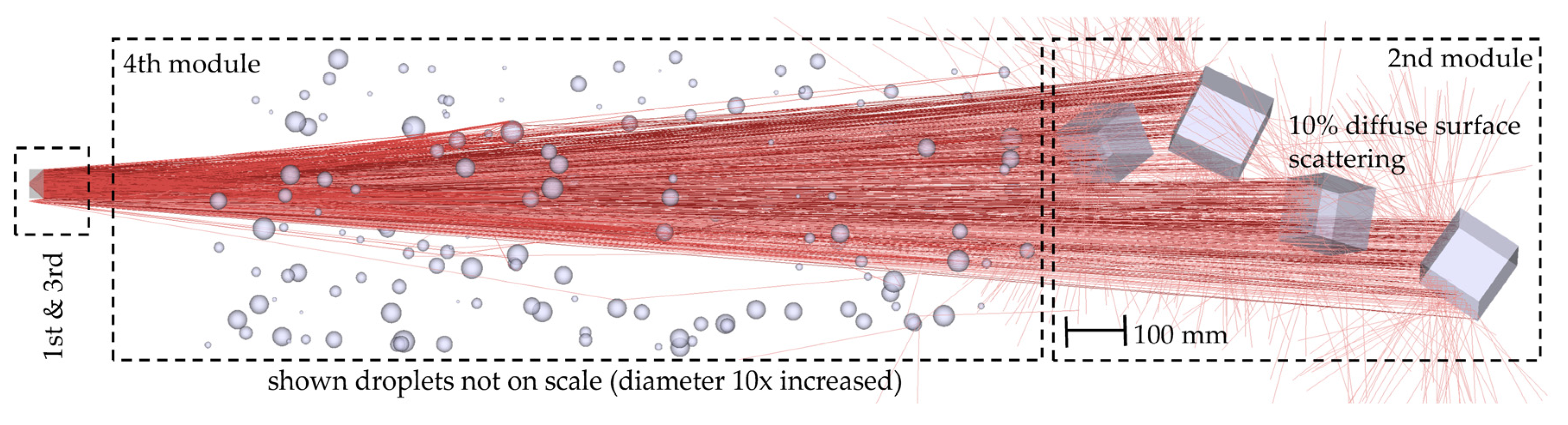
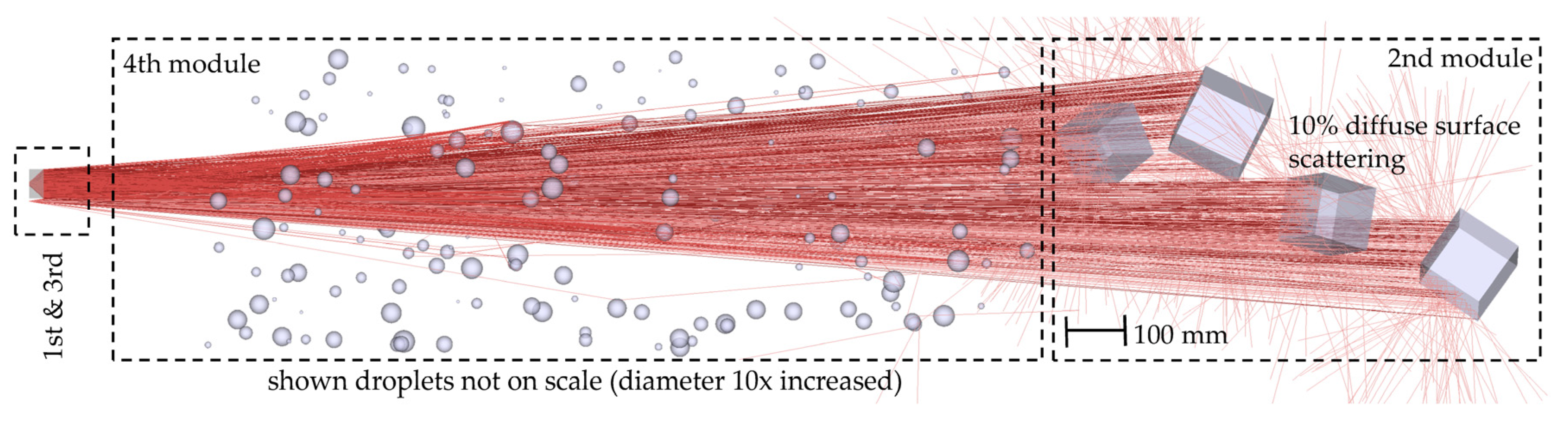
® Optic Studio and accounts effects of material reflection, scattering and absorption. The simulation model can be sectioned into 4 modules regarding their functionality (
Figure 1). The emitter optics (1st module) comprises a VCSEL array sending light pulses towards the scene (2nd module). Back-scattering at the scene’s objects traces the light pulses partially back towards the receiver optics and ToF camera sensor unit (3rd module). Rain influence (4th module) is modelled by randomly positioned water spheres placed between the ToF sensor and the scene. As intensity and travel time are analyzed individually for each ray hitting the sensor, the model allows a “per pixel” distance calculation mimicking the phase delay method between emitted and reflected signals [
2]. This also allows examination of the same scene under different environmental conditions.
3. Examining Rain Influence
Rain droplet diameters typically range from 0.4 mm to 4 mm with densities from 50 to 1200 drops per m
3 [
3,
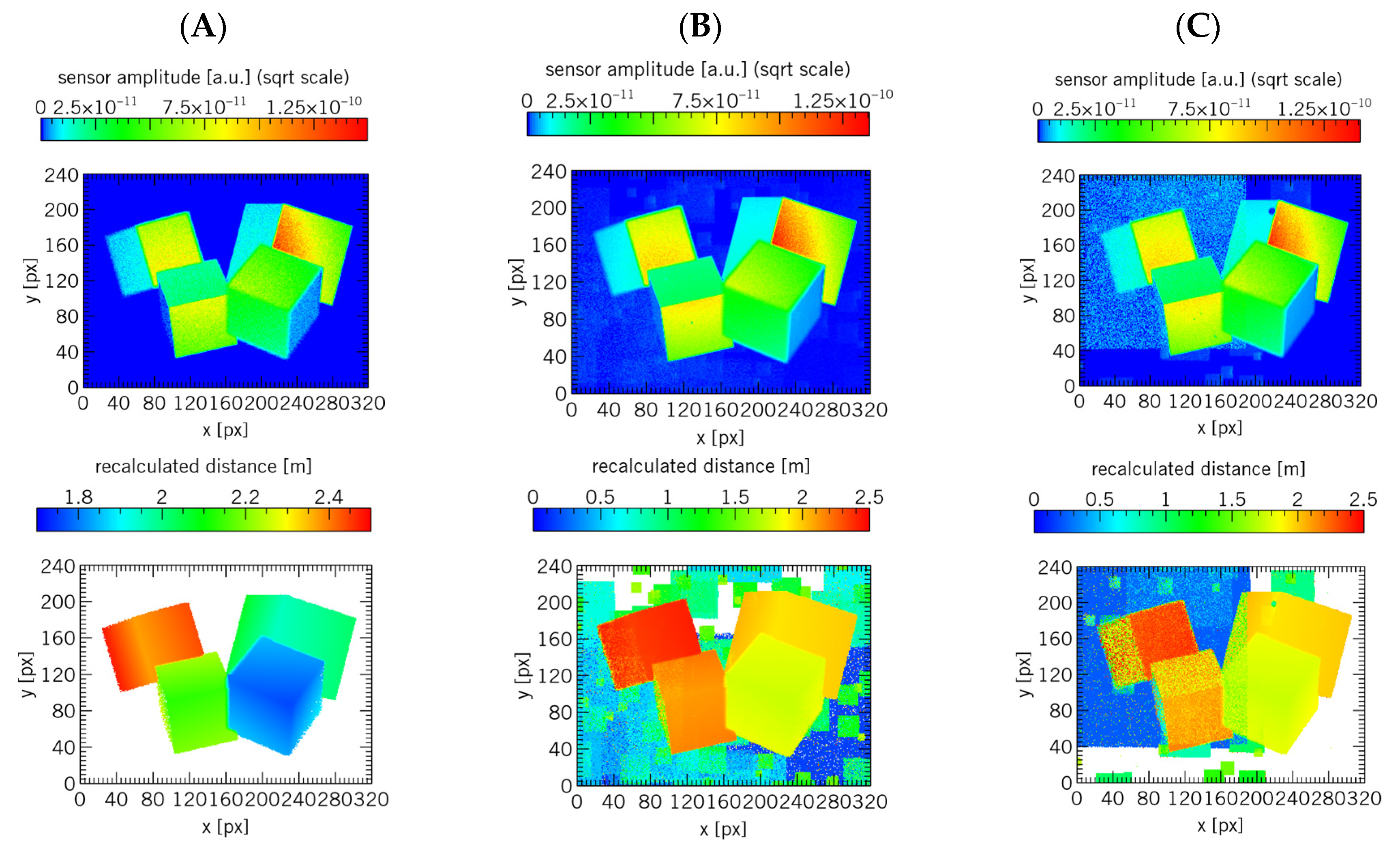
4]. Based on literature values, distributions for light and medium rain were modelled and their influence on the sensor signal examined (
Figure 2). As intensity and travel time are analyzed individually for each ray hitting the sensor, the model allows a “per pixel” distance comparison for the same scene under different environmental conditions.
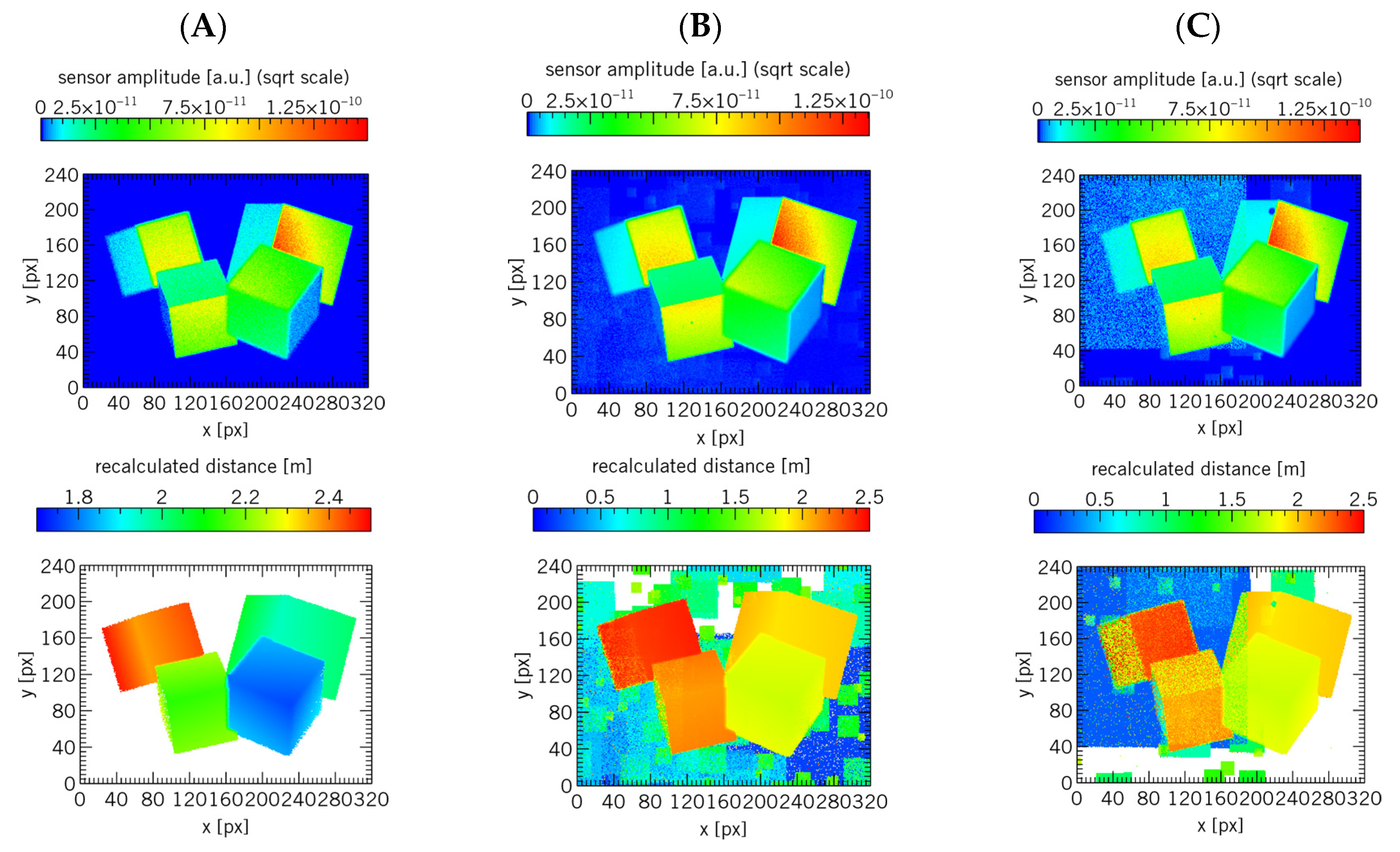
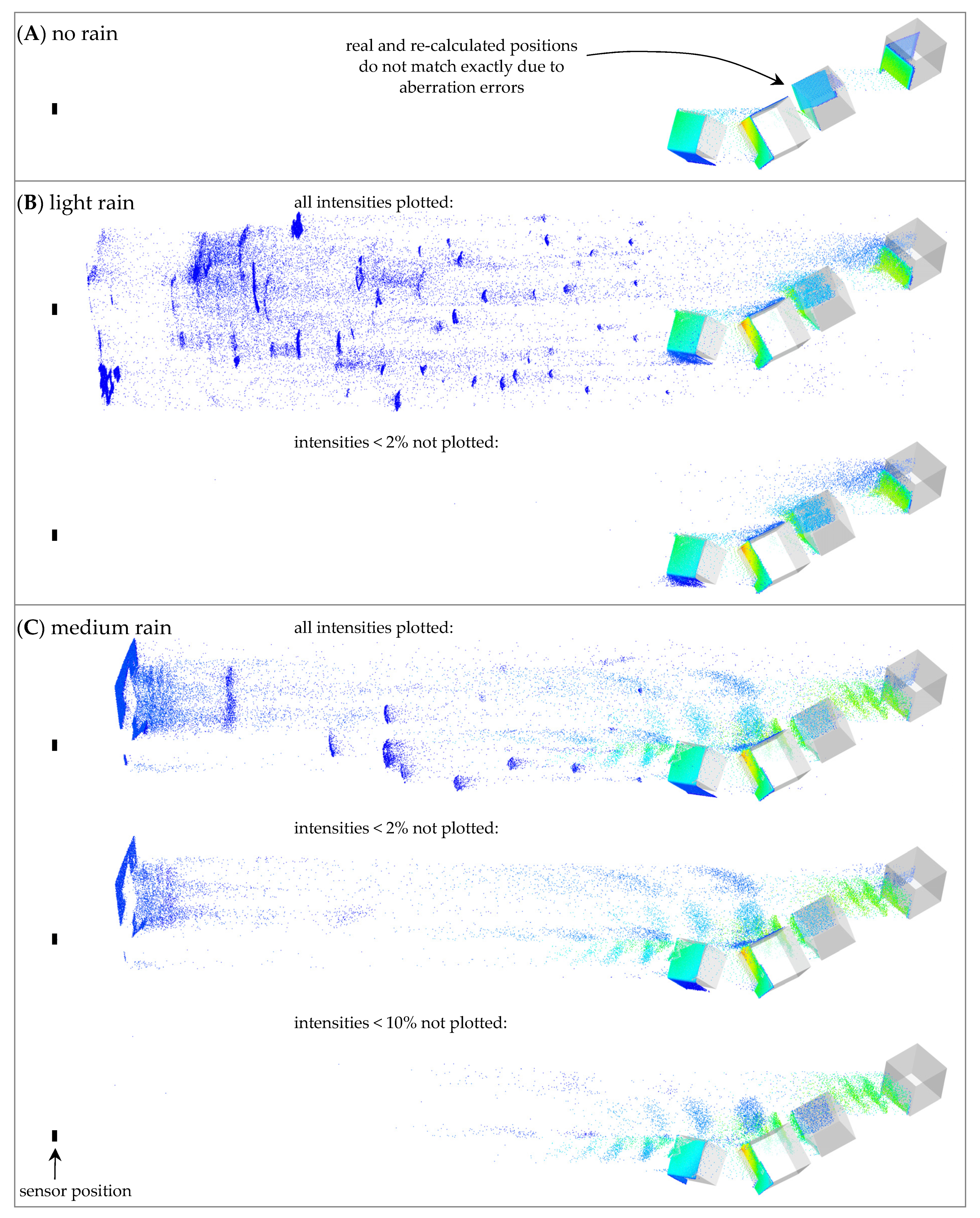
The sensor’s objective is to measure the scene’s objects distances and intensities. The following simple approach was applied to suppress rain influence. The ToF amplitude signals for all examined rain intensities (no rain, light rain and medium rain) were filtered with a minimum threshold, as low amplitude signals are more likely caused by rain droplets (
Figure 3). A 2% minimum threshold could successfully suppress most of the rain influence in the depth re-calculation for the light rain setup. In contrast, for medium rain more advanced error suppression methods are needed as even with a 10% minimum threshold a significant distance error caused from the rain droplets is still noticeable.
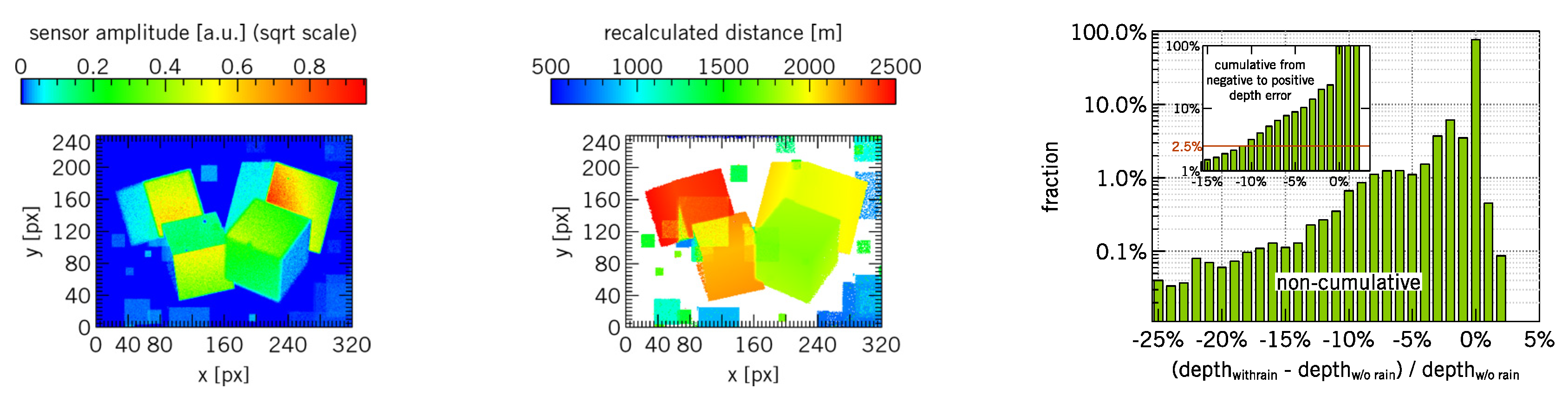
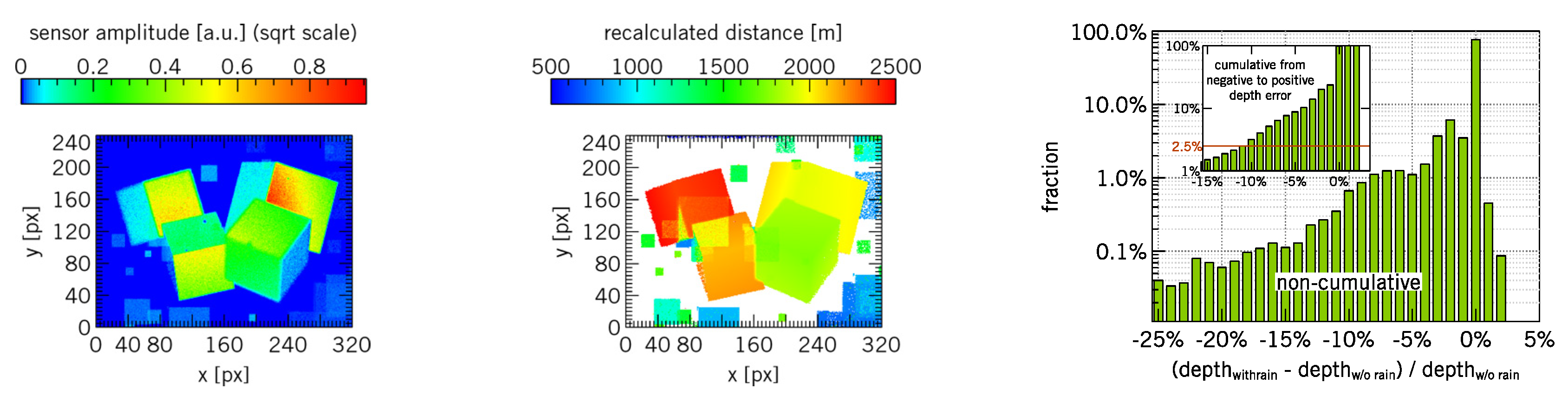
In case the more advanced error suppression methods will not perform as expected, it is important to quantify the erroneous influence of the rain on the signal. We set up and analyzed a “worst-case” model which features a density of 1000 particles/m
3 with randomly distributed rain diameters between 0.4 mm and 4 mm.
Figure 4 shows the simulation results. The re-calculated distance of the scene objects between “no rain” and “worst-case” model differ less than −10% for 97.5% of the values. The difference is due to overlying refraction and reflection effects from rain drops.
4. Conclusions and Outlook
The distance errors caused by the rain drops in our “light rain” model are mostly below 2% and can be suppressed by cutting all sensor intensity signals below this level. For larger rain drop sizes, as e.g., used in our medium rain model, more sophisticated algorithms filtering the rain influence from the sensor’s signal need to be developed. This will be a topic of future work.
From the additional presented “worst-case” rain model, the presence of rain has a significant impact on the re-calculated distance. For objects at longer distances as considered in our model, even higher distance errors are expected. The presence of raindrops leads to re-calculation of mainly too short distances in average. Regarding safety aspects, at least, this does not make the situation worse.
Distance error could be compensated with averaging of multiple sensor frames. Unfortunately the speed of falling rain drops (10–25 m/s) lies within the car’s speed on motorways and thus averaging only would work for slow driving speeds.
Further investigation of other scenes, as well as experimental verification is ongoing work.
Acknowledgments
This project has received funding from the Electronic Component Systems for European Leadership Joint Undertaking under grant agreement No. 692480. This Joint Undertaking receives support from the European Union’s Horizon 2020 research and innovation programme and Germany, Saxony, Spain, Austria, Belgium, Slovakia. Austrian co-funding comes from the Federal Ministries of Transport, Innovation and Technology (BMVIT) and Science, Research and Economy (BMWFW), managed on their behalf by the Austrian Research Promotion Agency (FFG). Additional financial support by the Austrian Provinces of Carinthia and Styria is also gratefully acknowledged.
Conflicts of Interest
The authors declare no conflict of interest. The funding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
References
- Ilas, C. Electronic sensing technologies for autonomous ground vehicles: A review. IEEE ATEE Int. Symp. 2013, 1–6. Available online: http://ieeexplore.ieee.org/document/6563528 (accessed on 6 June 2017). [CrossRef]
- Hansard, M.; Lee, S.; Choi, O.; Horaud, R.P. Characterization of Time-of-Flight Data. In Time of Flight Cameras: Principles, Methods, and Applications, 1st ed.; Springer: London, UK, 2012; pp. 1–12. Available online: https://hal.inria.fr/hal-00725654 (accessed on 6 June 2017). [CrossRef]
- Mason, B.J.; Andrews, J.B. Drop-size distributions from various types of rain. Q. J. R. Meteorol. Soc. 1960, 86, 346–353. Available online: http://onlinelibrary.wiley.com/doi/10.1002/qj.49708636906/full (accessed on 6 June 2017). [CrossRef]
- Cecchini, M.A.; Machado, L.A.T.; Artaxo, P. Droplet Size Distributions as a function of rainy system type and Cloud Condensation Nuclei concentrations. Atmos. Res. 2014, 143, 301–312. Available online: https://doi.org/10.1016/j.atmosres.2014.02.022 (accessed on 6 June 2017). [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).

{kind=link}
{kind=link}
{kind=link}
{kind=link}