Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators †


Abstract
:1. Introduction
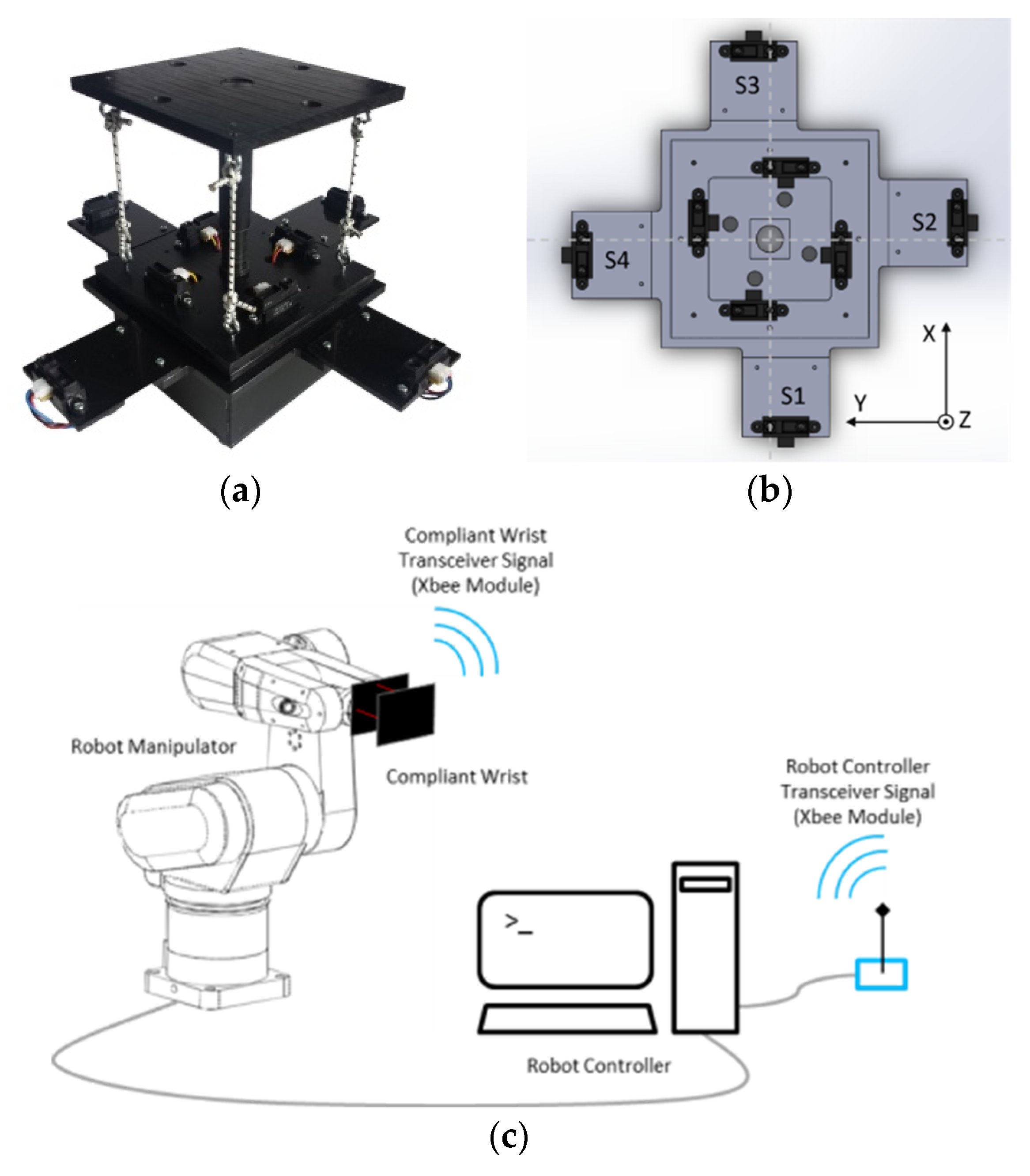
2. Instrumented Compliant Wrist Design
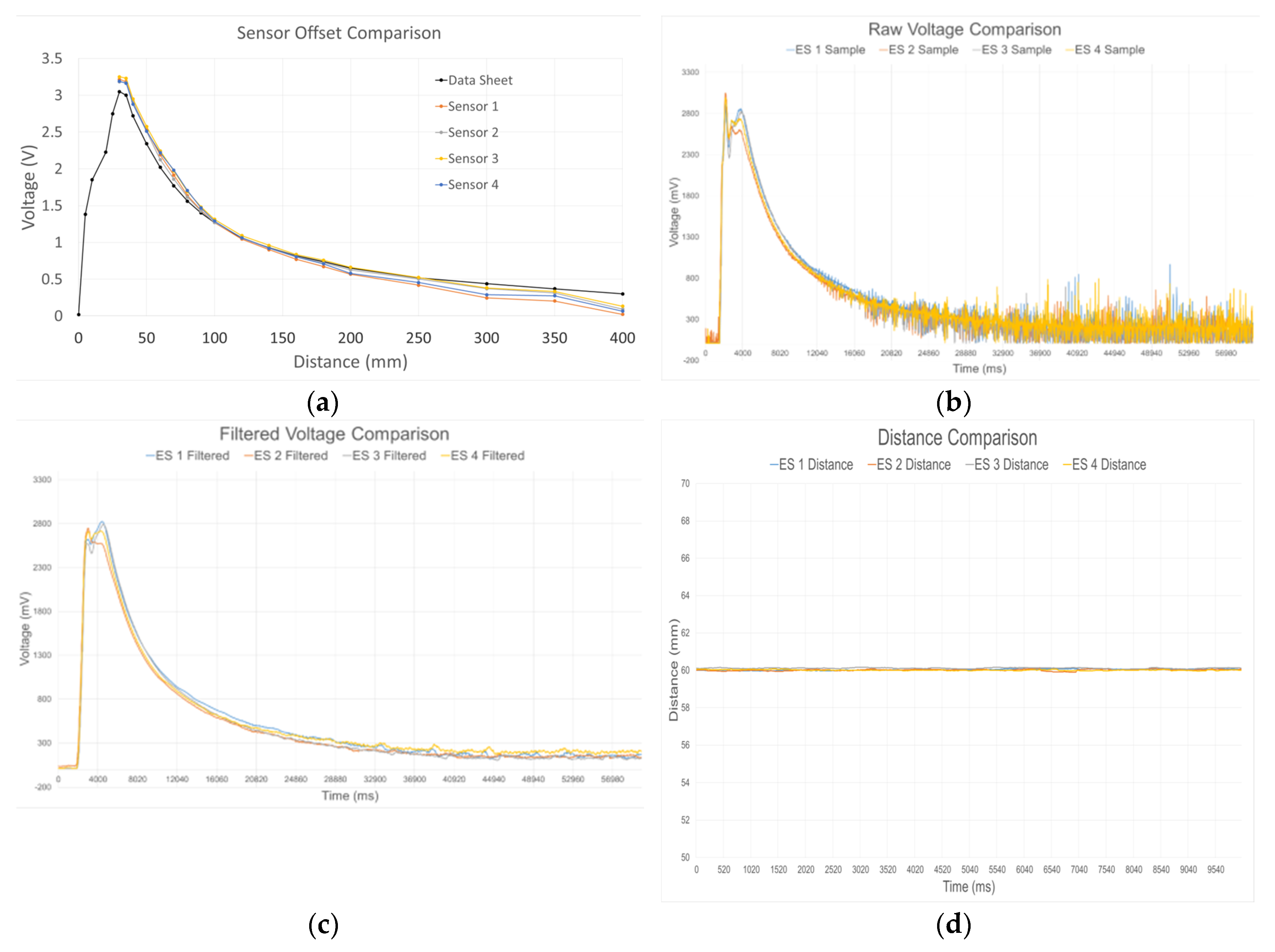
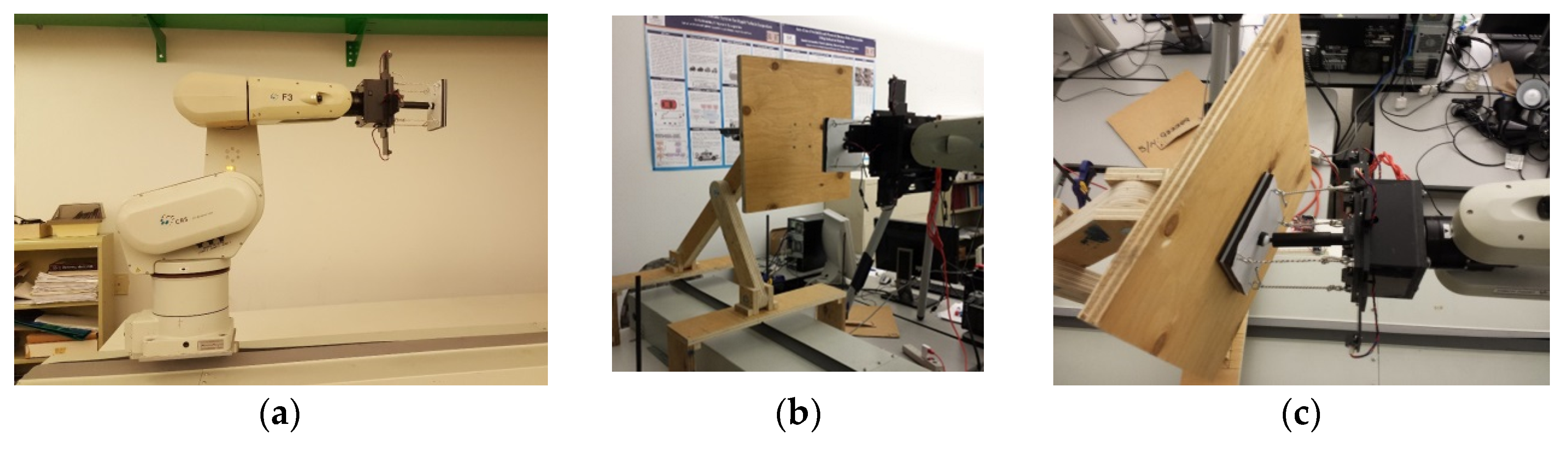
3. Compliant Wrist Experimental Performance Evaluation
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Quigley, M.; Asbeck, A.; Ng, A. A Low-Cost Compliant 7-DOF Robotics Manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 6051–6058. [Google Scholar]
- Pratt, G.A.; Williamson, M.M. Series of Elastic Actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems–Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; pp. 399–406. [Google Scholar]
- Bach-y-Rita, P.; Kercel, S.W. Sensory Substitution and the Human-Machine Interface. Trends Cognit. Sci. 2003, 7, 541–546. [Google Scholar] [CrossRef] [PubMed]
- Torres-Jara, E. Obrero: A Platform for Sensitive Manipulation. In Proceedings of the IEEE-RAS International Conference on Humanoid Robotics, Tsukuba, Japan, 5–7 December 2005; pp. 327–332. [Google Scholar]
- Bicchi, A.; Peshkin, M.A.; Colgate, J.E. Safety for Physical Human-Robot Interaction. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1335–1348. [Google Scholar]
- Cutkosky, M.R.; Wright, P.K. Position Sensing Wrists for Industrial Manipulators. In Proceedings of the 12th International Symposium of Industrial Robots, Paris, France, 9–11 June 1982. [Google Scholar]
- Wolffenbuttel, R.F.; Mahmoud, K.M.; Regtien, P.P.L. Compliant Capacitive Wrist Sensor for Use in Industrial Robots. IEEE Trans. Instrum. Meas. 1990, 39, 991–997. [Google Scholar] [CrossRef]
- Wolffenbuttel, R.F.; Mahmoud, K.M.; Regtien, P.P.L. Multiaxis Compliant Capacitive Wrist Sensor for Use in Automated Assembly with Industrial Robots. In Proceedings of the IEEE International Conference on Instrumentation and Measurement Technology, San Jose, CA, USA, 13–15 February 1990; pp. 54–59. [Google Scholar]
- Hashimoto, M.; Imanura, Y. Design and Characteristics of a Parallel Link Compliant Wrist. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; Volume 3, pp. 2457–2462. [Google Scholar]
- Lindsay, T.S.; Sinha, P.R.; Paul, R.P. An Instrumented Compliant Wrist for Robotics Applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 648–653. [Google Scholar]
- Sinha, P.R.; Xu, Y.; Bajcsy, R.K.; Paul, R.P. Robotic Exploration of Surfaces with a Compliant Wrist Sensor. Int. J. Robot. Res. 1993, 12, 107–120. [Google Scholar] [CrossRef]
- Petriu, E.; McMath, W.S.; Yueng, S.S.K.; Trif, N. Active Tactile Perception of Object Surface Geometric Profiles. IEEE Trans. Instrum. Meas. 1992, 41, 87–92. [Google Scholar] [CrossRef]
- Laferrière, P. Instrumented Compliant Wrist System for Enhanced Robotic Interaction. M.Sc. Thesis, University of Ottawa, Ottawa, ON, Canada, 2016. [Google Scholar]
- Nakhaeinia, D.; Laferrière, P.; Payeur, P.; Laganière, R. Safe Close-Proximity and Physical Human-Robot Interaction Using Industrial Robots. In Proceedings of the 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 237–244. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Tz(Rx = 0°) (mm) | Tz(Rx = −30°) (mm) | Rx(Rx = 0°) (°) | Rx(Rx = −30°) (°) | Ry(Rx = 0°) (°) | Ry(Rx = −30°) (°) | |
|---|---|---|---|---|---|---|
| Tz = 50 mm | 50.33 ± 0.15 | 49.32 ± 0.49 | −0.04 ± 0.06 | −30.62 ± 0.33 | 0.01 ± 0.12 | −0.16 ± 0.04 |
| Tz = 75 mm | 75.59 ± 0.25 | 75.47 ± 0.74 | 0.19 ± 0.18 | −29.97 ± 0.40 | 0.06 ± 0.24 | 0.09 ± 0.19 |
| Tz = 100 mm | 102.23 ± 0.33 | 101.60 ± 0.62 | 0.25 ± 0.27 | −30.47 ± 0.33 | −0.06 ± 0.22 | 0.38 ± 0.22 |
| Tz(Rx = 0°) (mm) | Tz(Rx = −10°) (mm) | Rx(Rx = 0°) (°) | Rx(Rx = −10°) (°) | Ry(Rx = 0°) (°) | Ry(Rx = −10°) (°) | |
|---|---|---|---|---|---|---|
| Tz = −10 mm | −9.91 ± 0.08 | −9.88 ± 0.09 | 0.02 ± 0.14 | −10.36 ± 0.13 | 0.05 ± 0.15 | −0.10 ± 0.19 |
| Tz = −20 mm | −19.91 ± 0.07 | −20.01 ± 0.07 | −0.08 ± 0.08 | −10.21 ± 0.11 | −0.01 ± 0.08 | 0.13 ± 0.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laferrière, P.; Payeur, P. Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators. Proceedings 2017, 1, 31. https://doi.org/10.3390/ecsa-3-E009
Laferrière P, Payeur P. Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators. Proceedings. 2017; 1(2):31. https://doi.org/10.3390/ecsa-3-E009
Chicago/Turabian StyleLaferrière, Pascal, and Pierre Payeur. 2017. "Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators" Proceedings 1, no. 2: 31. https://doi.org/10.3390/ecsa-3-E009
APA StyleLaferrière, P., & Payeur, P. (2017). Proximity and Contact Sensing with Instrumented Compliant Wrist for Close Guidance of Robotic Manipulators. Proceedings, 1(2), 31. https://doi.org/10.3390/ecsa-3-E009