Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks †



{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Solution in a Simulated Environment
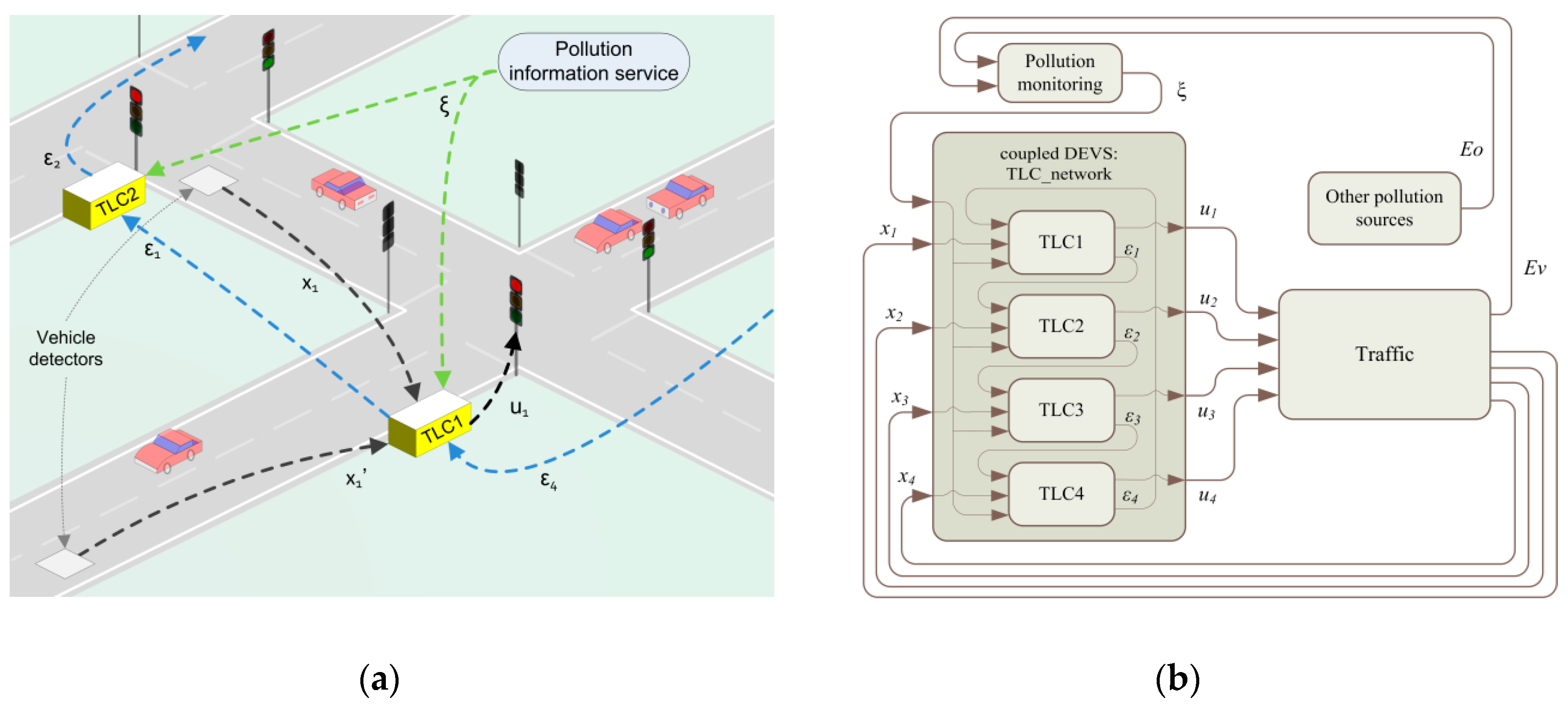
2.1. Modeling
2.2. Consensus-Based Cooperative Control Design
2.3. Scenario Simulation
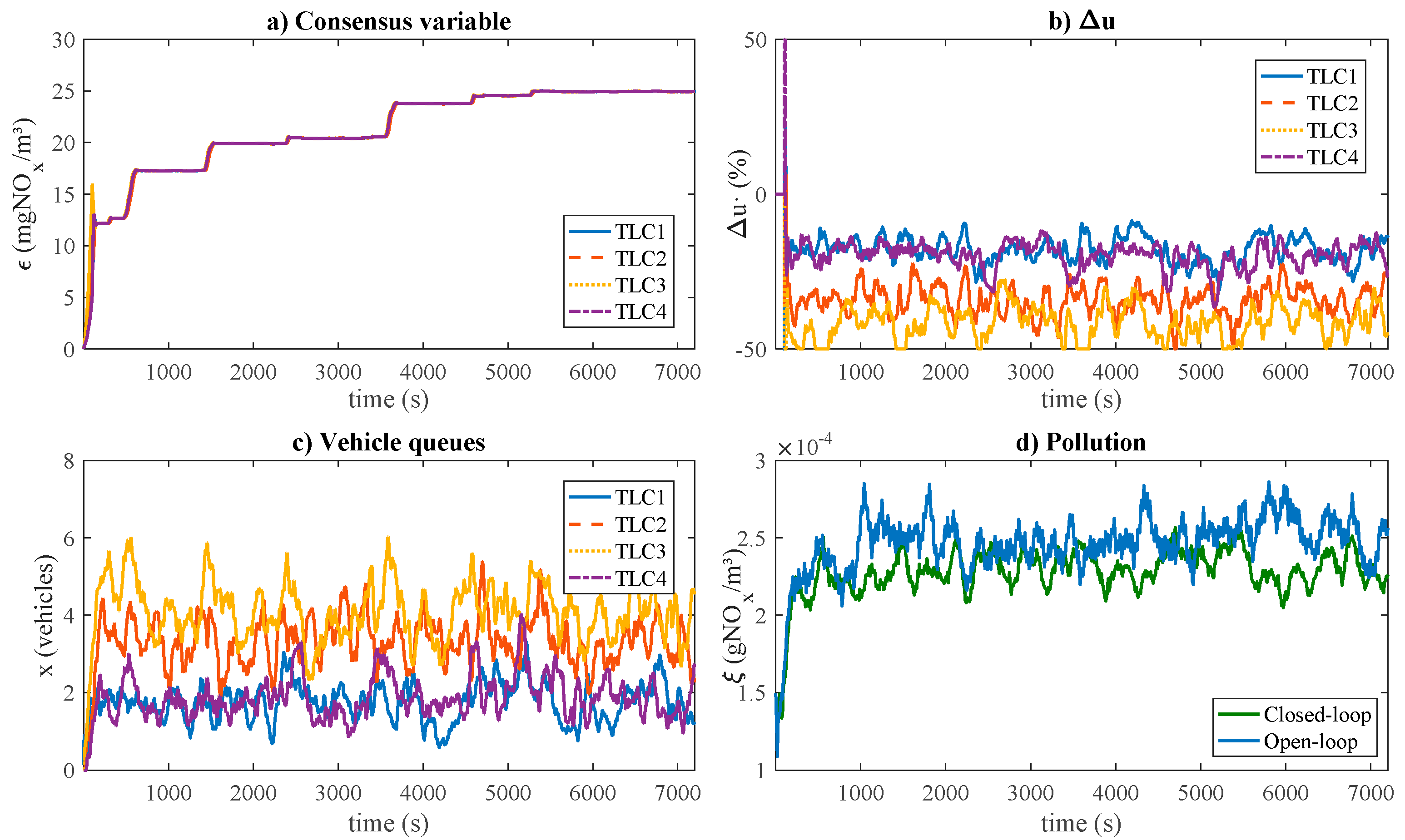
3. Results & Discussion
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Gurgen, L.; Gunalp, O.; Benazzouz, Y.; Gallissot, M. Self-aware cyber-physical systems and applications in smart buildings and cities. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), 18–22 March 2013; pp. 1149–1154. [Google Scholar]
- Nanayakkara, T.; Sahin, F.; Jamshidi, M. Intelligent Control Systems with an Introduction to System of Systems Engineering; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Joordens, M.A.; Jamshidi, M. Consensus Control for a System of Underwater Swarm Robots. Syst. J. IEEE 2010, 4, 65–73. [Google Scholar] [CrossRef]
- Wang, Z.; Sui, C. Distributed traffic network control system. In Proceedings of the 2013 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC), Kunming, China, 5–8 August 2013; pp. 1–4. [Google Scholar]
- Castro, G.; Martini, J.; Hirakawa, A. Multilayer distributed model predictive control of urban traffic. WIT Trans. Ecol. Environ. 2013, 179, 967–976. [Google Scholar]
- Ando, B.; Baglio, S.; Graziani, S.; Pecora, E.; Pitrone, N. A predictive model for urban air pollution evaluation. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference Sensing, Processing, Networking, IMTC/97. Proceedings, 19–21 May 1997; Volume 2, pp. 1056–1059. [Google Scholar]
- Zeigler, B.P.; Sarjoughian, H.S. Guide to Modeling and Simulation of Systems of Systems; Springer: London, UK, 2013. [Google Scholar]
- Ren, W.; Beard, R. Distributed Consensus in Multi-Vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2007. [Google Scholar]
- Belalcazar, L.C.; Fuhrer, O.; Ho, M.D.; Zarate, E.; Clappier, A. Estimation of road traffic emission factors from a long term tracer study. Atmos. Environ. 2009, 43, 5830–5837. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent development and applications of SUMO–simulation of urban mobility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Rexeis, M.; Hausberger, S.; Kühlwein, J.; Luz, R. Update of Emission Factors for Euro 5 and Euro 6 Vehicles for the HBEFA Version 3.2; TUG Report I-31/2013/Rex EM-I 2011/20/679 (http://www.hbefa.net/), TU Graz; Graz University of Technology: Graz, Austria, 2014. [Google Scholar]
- Acosta, A.; Espinosa, J.; Espinosa, J. TraCI4Matlab: Enabling the Integration of the SUMO Road Traffic Simulator and Matlab® Through a Software Re-engineering Process. In Modeling Mobility with Open Data; Behrisch, M., Weber, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 155–170. [Google Scholar]
- Pawletta, T.; Deatcu, C.; Pawletta, S.; Hagendorf, O.; Colquhoun, G. DEVS-based modeling and simulation in scientific and technical computing environments. Simul. Ser. 2006, 38, 151. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Artuñedo, A.; Del Toro, R.M.; Haber, R. Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks. Proceedings 2017, 1, 29. https://doi.org/10.3390/ecsa-3-E008
Artuñedo A, Del Toro RM, Haber R. Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks. Proceedings. 2017; 1(2):29. https://doi.org/10.3390/ecsa-3-E008
Chicago/Turabian StyleArtuñedo, Antonio, Raúl M. Del Toro, and Rodolfo Haber. 2017. "Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks" Proceedings 1, no. 2: 29. https://doi.org/10.3390/ecsa-3-E008
APA StyleArtuñedo, A., Del Toro, R. M., & Haber, R. (2017). Consensus-Based Cooperative Control Approach Applied to Urban Traffic Networks. Proceedings, 1(2), 29. https://doi.org/10.3390/ecsa-3-E008