Sensing of the Engine Cylinder Valves Motion †


Abstract
:1. Introduction
2. Peripheral Electric and Electronic Devices
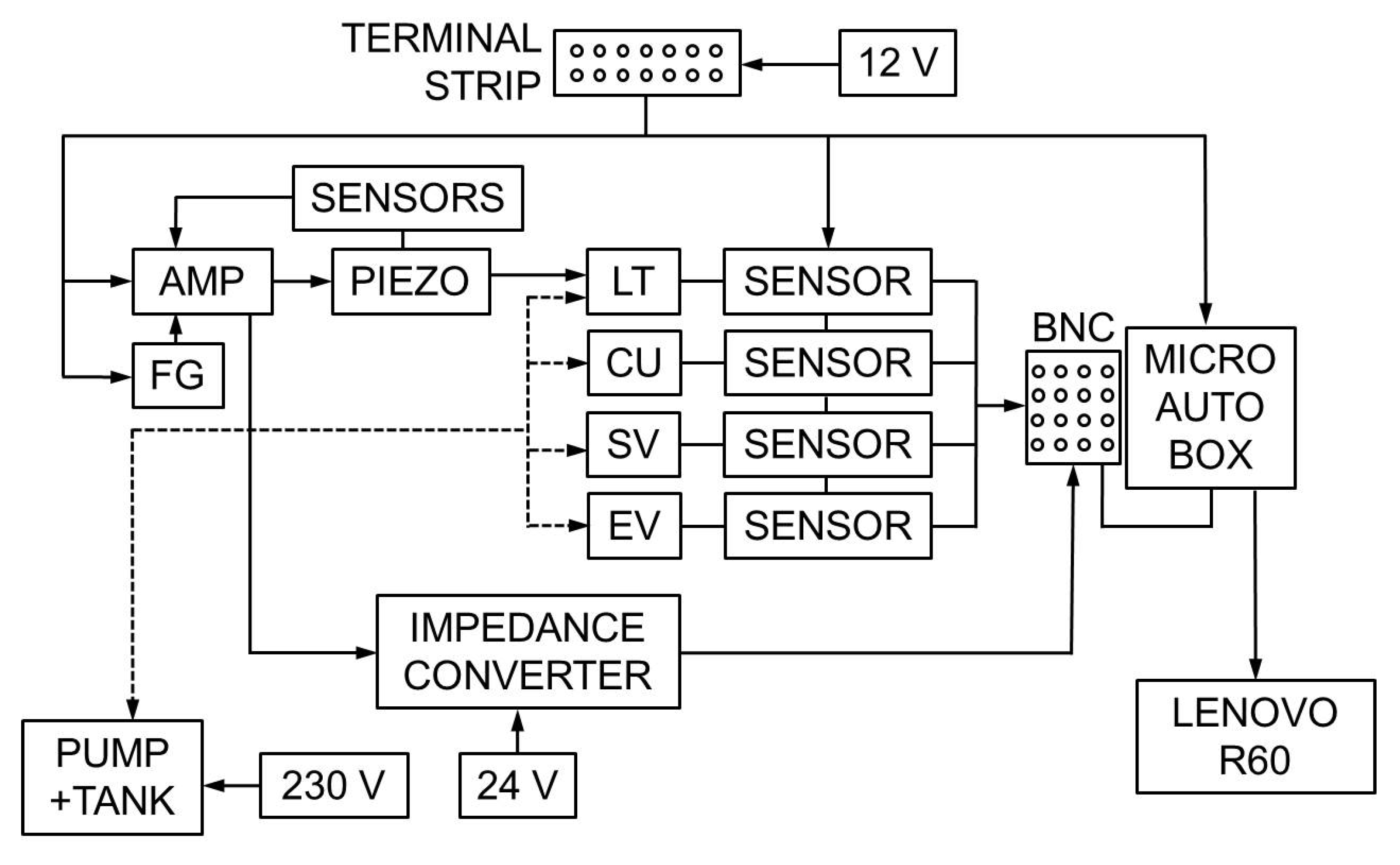
2.1. Block Diagram of the Redesigned FVVT Sytem
- AMP = piezo amplifier
- FG = function generator
- LT = lever transmission
- CU = control unit
- SV = servo valve
- EV = engine valve body
- control piston in the control unit
- servo piston within the servo valve
- engine valves
2.2. Displacement Sensors
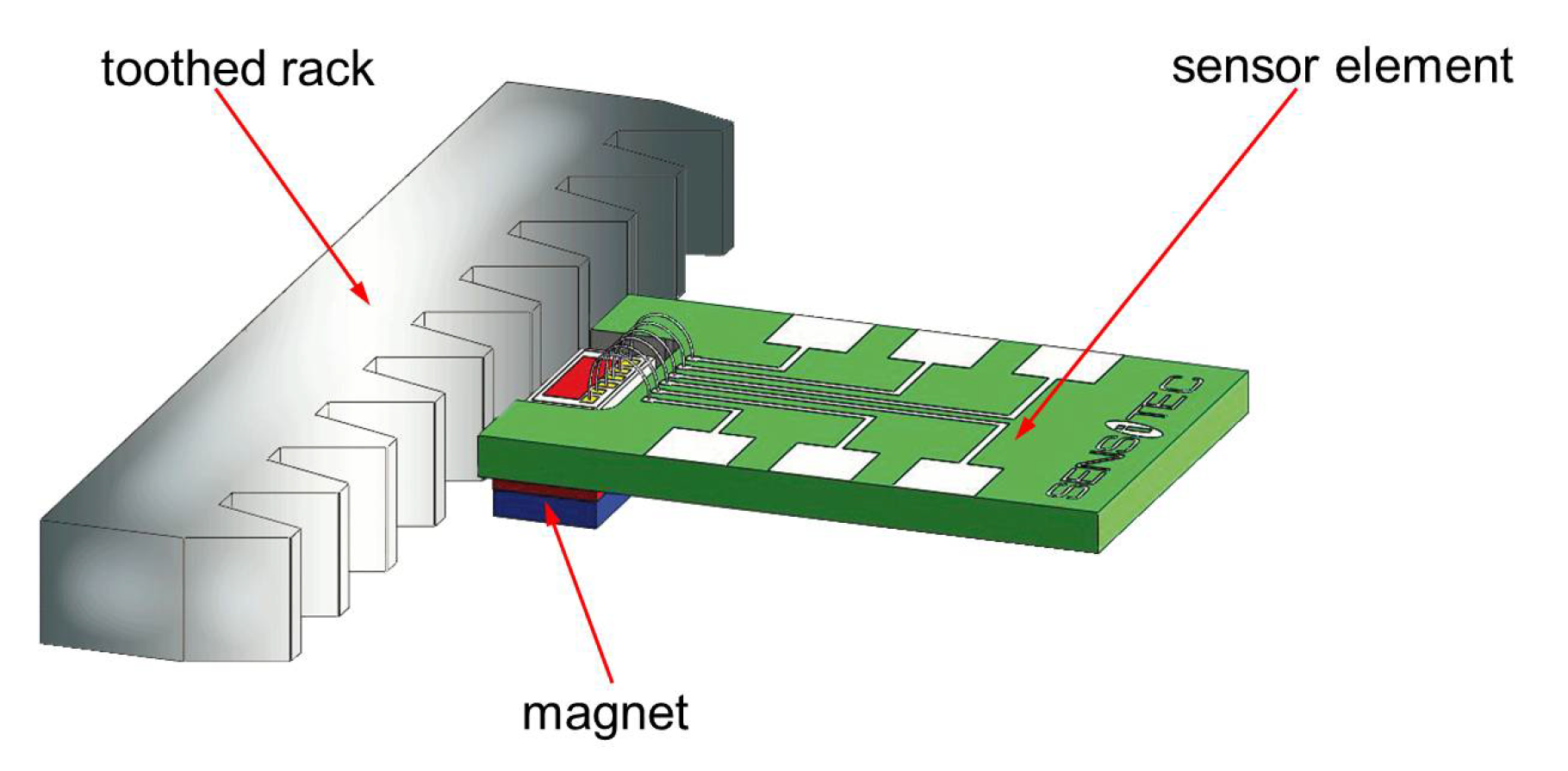
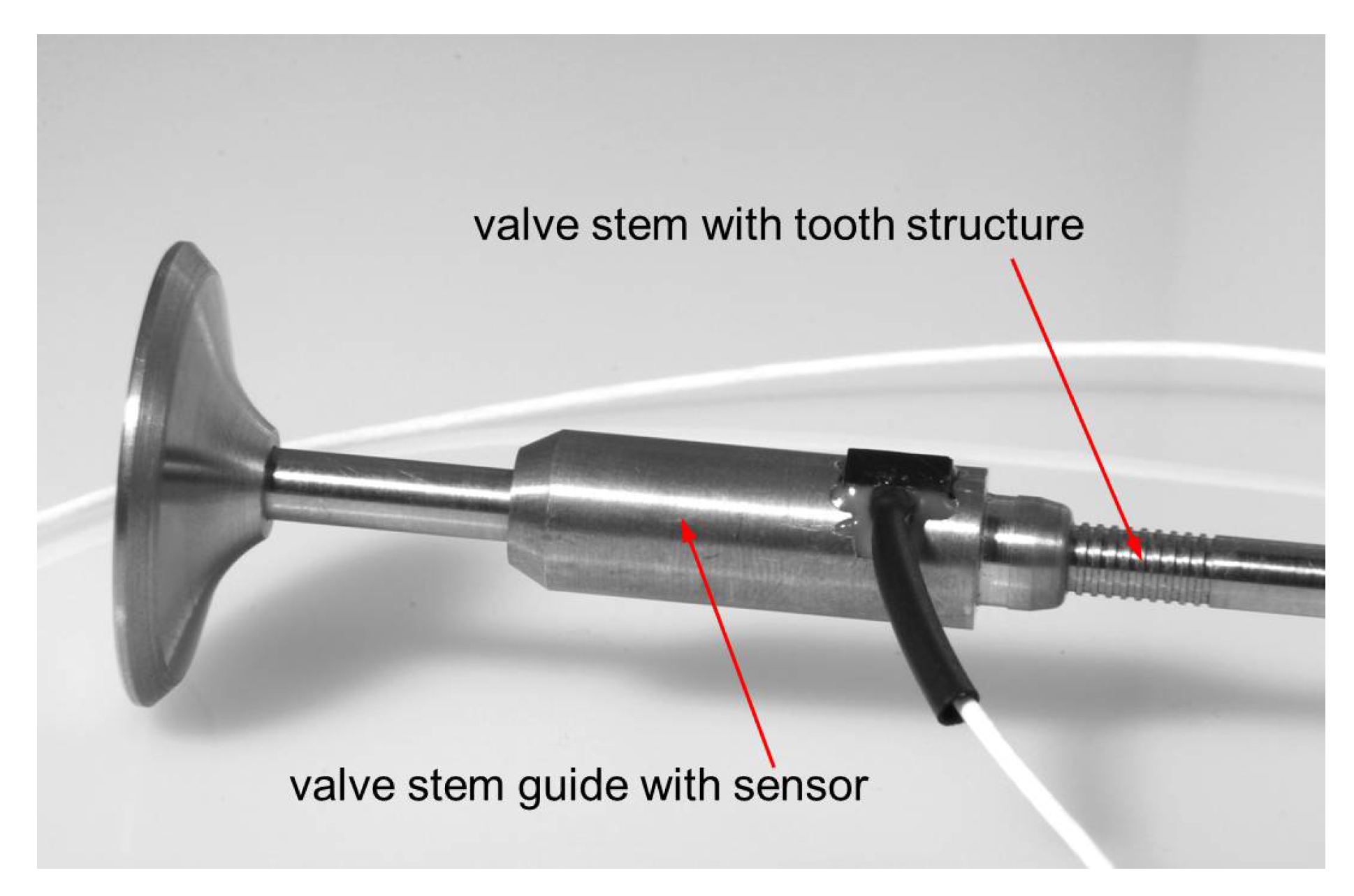
2.2.1. Sensitec GLM7xxASB-Ax
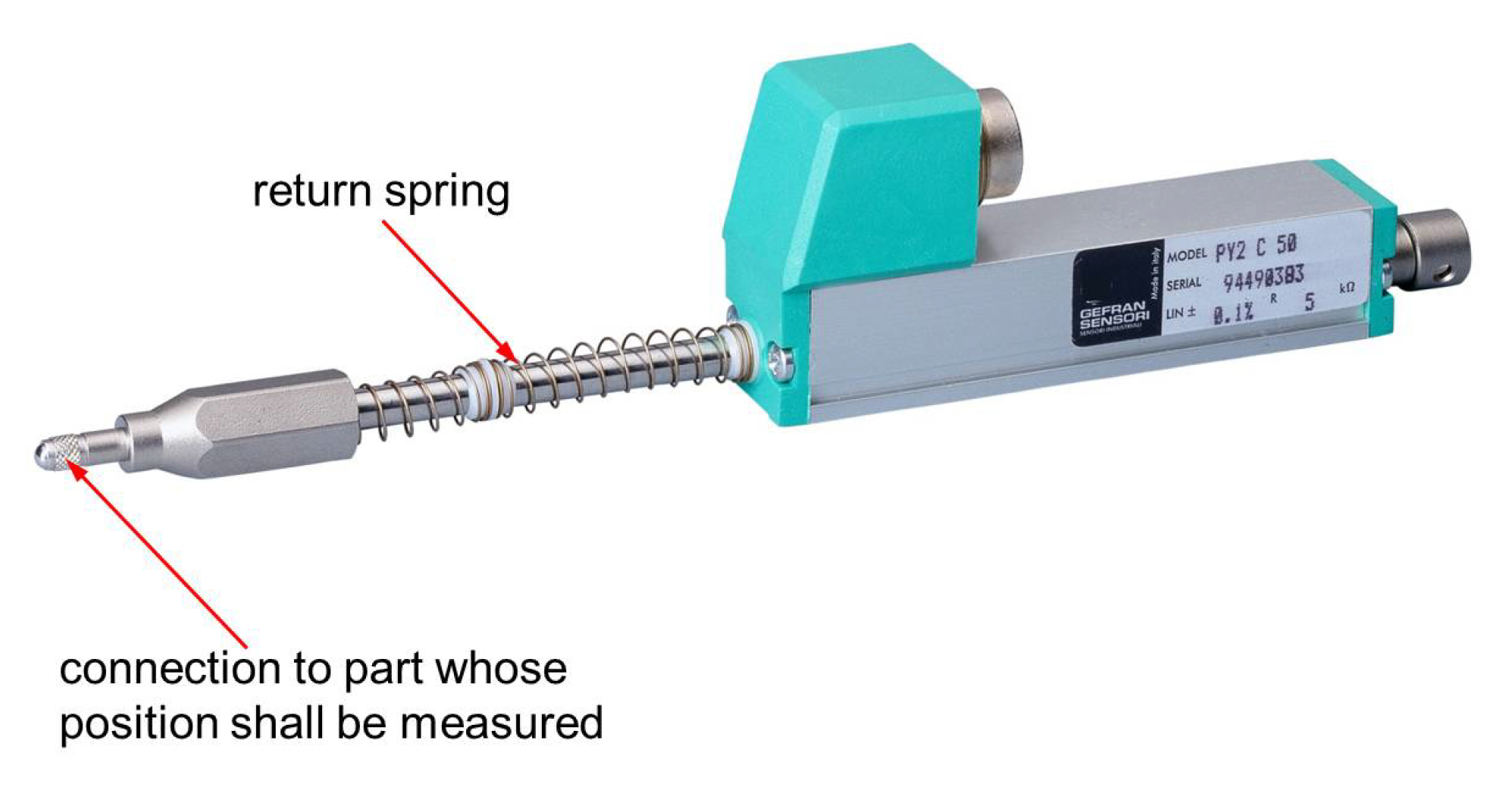
2.2.2. Gefran PY2C25
2.2.3. Cost-Benefit Analysis
2.3. Pressure Transducer
2.4. Piezo Amplifier
2.5. Development Control System and Some Measurements
References
- Sensitec. Products, Length-And-Path, Details about the Technical Principles of the Length and Position Measurement. 2014. Available online: http://www.sensitec.com/ (accessed on 27 April 2017).
- Sensitec. Technology, MR Sensor Technology. 2014. Available online: http://www.sensitec.com/ (accessed on 27 April 2017).
- Deng, C.; Kang, Y.; Li, E.; Zhang, Y.; Cheng, J.; Ge, T. A new model of the signal generation mechanism on magnetostrictive position sensor. Measurement 2014, 47, 591–597. [Google Scholar] [CrossRef]
- MTS Sensor Technologie GmbH & Co. KG. Die Temposonics® Positionsmessung—Magnetostriktiv! 2014. Available online: http://www.mtssensor.de/Magnetostriktion.26.0.html (accessed on 27 April 2017).
- Gefran SPA. PY2 Rectilinear Displacement Transducer. 2014. Available online: http://www.gefran.com/en/product_categories/38-\rectilinear-displacement-transducers%28rc1%29/products/73-py2-rectilinear-displacement-transducer#certifications (accessed on 27 April 2017).
- Physik Instrumente (PI). PICA High-Power Piezo Driver/Servo Controller: High Energy Efficiency through Energy Recovery; PDF Catalogue Datasheet; Physik Instrumente GmbH & Co. KG: Karlsruhe/Palmbach, Germany, 2012. [Google Scholar]
- dSPACE. Exklusive Angebote für Hochschulen: dSPACE ACE Kit; Product Brochure; dSPACE Digital Signal Processing and Control Engineering GmbH: Paderborn, Germany, 2014. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criterion | Weighting | Sensitec GLM700 | Gefran PY2C25 | ||
|---|---|---|---|---|---|
| Fulfillment | FxW | Fulfillment | FxW | ||
| Cost | 4 | 1 | 4 | 8 | 32 |
| Dynamic performance | 3 | 10 | 30 | 8 | 24 |
| Precision | 3 | 10 | 30 | 10 | 30 |
| Sensor wear | 2 | 10 | 20 | 10 | 20 |
| Package | 2 | 10 | 20 | 5 | 10 |
| Installation | 4 | 1 | 4 | 8 | 32 |
| Total | 108 | 148 | |||
| Ranking | 2 | 1 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Behre, L.; Mercorelli, P. Sensing of the Engine Cylinder Valves Motion. Proceedings 2017, 1, 26. https://doi.org/10.3390/ecsa-3-E013
Behre L, Mercorelli P. Sensing of the Engine Cylinder Valves Motion. Proceedings. 2017; 1(2):26. https://doi.org/10.3390/ecsa-3-E013
Chicago/Turabian StyleBehre, Leander, and Paolo Mercorelli. 2017. "Sensing of the Engine Cylinder Valves Motion" Proceedings 1, no. 2: 26. https://doi.org/10.3390/ecsa-3-E013
APA StyleBehre, L., & Mercorelli, P. (2017). Sensing of the Engine Cylinder Valves Motion. Proceedings, 1(2), 26. https://doi.org/10.3390/ecsa-3-E013