
Distinctive LMI Formulations for Admissibility and Stabilization Algorithms of Singular Fractional-Order Systems with Order Less than One




Abstract
1. Introduction
- (1)
- The proposed admissibility criteria are different from all existing criteria. Extending the results of [18] from IOSs to singular FOSs with order further enriches the theory of admissibility analysis. Moreover, unlike the method in [28], which requires numerous decision variables, the proposed criterion involves only a single LMI variable, thereby reducing computational complexity.
- (2)
- These criteria provide several advantageous characterizations of existing results. The proposed approach avoids the use of complex variables [24,25,26], making it well-suited for handling eigenvalues of system matrices with positive real parts. It also eliminates the need for a large number of LMI variables [27] and does not include equality constraints [29,30], thereby facilitating both controller design and numerical implementation.
- (3)
- For bilinear matrix inequalities that cannot be directly solved using the LMI toolbox [31,32], the proposed BBA provides an effective approach of obtaining feasible solutions and facilitates the design of state feedback controllers. In addition, the algorithm features low computational complexity and achieves high efficiency in solving feasible solutions.
2. Problem Statements and Preliminaries
- (1)
- for , there exist dimensional real square matrices X and Y such that
- (2)
- for , there exist dimensional real square matrices X and Y, and the dimensional real matrix Q, such thatwhere , the function returns the standard orthogonal basis of the zero space. The definition of the matrix S, which appears later in this paper, remains the same and will not be repeated.
3. Main Results
3.1. Novel Admissibility Conditions for Singular FOSs
- (1)
- (2)
- Case 2: . By the definition of b, it follows that .
- (i)
- (ii)
- (iii)
3.2. Novel Stabilization Conditions for Singular FOSs
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lim, Y.; Oh, M.; Ahn, H. Stability and stabilization of fractional-order linear systems subject to input saturation. IEEE Trans. Autom. Control 2013, 58, 1062–1067. [Google Scholar] [CrossRef]
- Zhang, X.F.; Liu, R.; Ren, J.X.; Cui, Q.L. Adaptive fractional image enhancement algorithm based on rough set and particle swarm optimization. Fractal Fract. 2022, 6, 100. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. On stability of fractional order systems. In Proceedings of the Third IFAC Workshop on Fractional Differentiation and Its Applications FDA’08, Ankara, Turkey, 5–7 November 2008. [Google Scholar]
- Zhang, X.F.; Lin, C.; Chen, Y.Q.; Boutat, D. A unified framework of stability theorems for LTI fractional order systems with 0 < α < 2. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3237–3241. [Google Scholar]
- Zhang, X.F.; Chen, Y.Q. Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0 < α < 1 case. ISA Trans. 2018, 82, 42–50. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zeng, X.M.; Yang, H.M.; Lv, X.D.; Guo, F.X.; Shi, Y.; Hanif, A. Investigation and application of fractal theory in cement-based materials: A review. Fractal Fract. 2021, 5, 247. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Zhang, X.F.; Boutat, D.; Liu, D.-Y. Fractional-order complex systems: Advanced control, intelligent estimation and reinforcement learning image-processing algorithms. Fractal Fract. 2025, 9, 67. [Google Scholar] [CrossRef]
- Huang, L.L.; Wu, G.C.; Baleanu, D.; Wang, H.Y. Discrete fractional calculus for interval-valued systems. Fuzzy Sets Syst. 2021, 404, 141–158. [Google Scholar] [CrossRef]
- Gong, P.; Lan, W.; Han, Q.L. Robust adaptive fault-tolerant consensus control for uncertain nonlinear fractional-order multi-agent systems with directed topologies. Automatica 2020, 117, 109011. [Google Scholar] [CrossRef]
- Wang, X.Y.; Zhang, X.F.; Pedrycz, W.; Yang, S.-H.; Boutat, D. Consensus of T-S fuzzy fractional-order, singular perturbation, multi-agent systems. Fractal Fract. 2024, 8, 523. [Google Scholar] [CrossRef]
- Guo, Y.; Lin, C. The disturbance rejection control of fractional-order system. Math. Method. Appl. Sci. 2025, 48, 11559–12614. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Ding, J.L.; Chai, T.Y. Fault-tolerant prescribed performance control of wheeled mobile robots: A mixed-gain adaption approach. IEEE Trans. Autom. Control 2024, 69, 5500–5507. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Xu, K.D.; Wang, Q.-G. Prescribed performance tracking control of time-delay nonlinear systems with output constraints. IEEE/CAA J. Autom. Sin. 2024, 11, 1557–1565. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Ding, J.L.; Chai, T.Y. Cyclic performance monitoring-based fault-tolerant funnel control of unknown nonlinear systems with actuator failures. IEEE Trans. Autom. Control 2025. early access. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Cui, E.-Y.; Shi, P. Low-complexity high-performance control of unknown block-triangular MIMO nonlinear systems. IEEE Trans. Ind. Electron. 2024, 72, 7515–7523. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Yang, G.-H. Low-complexity tracking control of strict-feedback systems with unknown control directions. IEEE Trans. Autom. Control 2019, 64, 5175–5182. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Liu, Y.-Q.; Chai, T.Y. Singularity-free low-complexity fault-tolerant prescribed performance control for spacecraft attitude stabilization. IEEE Trans. Autom. Sci. Eng. 2025, 22, 15408–15419. [Google Scholar] [CrossRef]
- Wu, J.L.; Yung, C.F. A new generalized bounded real lemma for continuous-time descriptor systems. Asian J. Control 2022, 24, 2729–2737. [Google Scholar] [CrossRef]
- Feng, Z.; Shi, P. Two equivalent sets: Application to singular systems. Automatica 2017, 77, 198–205. [Google Scholar] [CrossRef]
- Matignon, D. Stability result on fractional differential equations with applications to control processing. Comput. Eng. Syst. Appl. 1996, 2, 963–968. [Google Scholar]
- Amini, A.; Azarbahram, A.; Sojoodi, M. H∞ consensus of nonlinear multi-agent systems using dynamic output feedback controller: An LMI approach. Nonlinear Dyn. 2016, 85, 1865–1886. [Google Scholar] [CrossRef]
- El-Khazali, R.; Momani, S. Stability analysis of composite fractional systems. Int. J. Appl. Math. 2003, 12, 73–85. [Google Scholar]
- Tavazoei, M.; Haeri, M. A note on the stability of fractional order systems. Math. Comput. Simul. 2009, 79, 1566–1576. [Google Scholar] [CrossRef]
- Ahn, H.; Chen, Y.Q. Necessary and sufficient stability condition of fractional-order interval linear systems. Automatica 2008, 44, 2985–2988. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI stability conditions for fractional order systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Farges, C.; Moze, M.; Sabatier, J. Pseudo-state feedback stabilization of commensurate fractional order systems. Automatica 2010, 46, 1730–1734. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhong, Y. Robust stability for fractional-order systems with structured and unstructured uncertainties. Comput. Math. Appl. 2012, 3258–3266. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, Y.Q. Robust stability and stabilization of fractional-order interval systems with the fractional order α: The 0 < α < 1 Case. IEEE Trans. Autom. Control 2009, 152–158. [Google Scholar]
- Marir, S.; Chadli, M.; Basin, M. Necessary and sufficient admissibility conditions of dynamic output feedback for singular linear fractional-order systems. Asian J. Control 2023, 25, 2439–2450. [Google Scholar] [CrossRef]
- Liu, Y.C.; Cui, L.; Duan, D.P. Dynamic output feedback stabilization of singular fractional-order systems. Math. Probl. Eng. 2016, 9694780. [Google Scholar] [CrossRef]
- Marir, S.; Chadli, M.; Bouagada, D. A novel approach of admissibility for singular linear continuous-time fractional-order systems. Int. J. Control Autom. Syst. 2017, 15, 959–964. [Google Scholar] [CrossRef]
- Marir, S.; Chadli, M. Robust admissibility and stabilization of uncertain singular fractional-order linear time-invariant systems. IEEE/CAA J. Autom. Sin. 2019, 6, 685–692. [Google Scholar] [CrossRef]
- Ji, Y.; Qiu, J.Q. Stabilization of fractional-order singular uncertain systems. ISA Trans. 2015, 56, 53–643. [Google Scholar] [CrossRef] [PubMed]
- N’Doye, I.; Darouach, M.; Zasadzinski, M.; Radhy, N. Robust stabilization of uncertain descriptor fractional-order systems. Automatica 2013, 49, 1907–1913. [Google Scholar] [CrossRef]
- Wei, Y.H.; Tse, P.W.; Yao, Z.; Wang, Y. The output feedback control synthesis for a class of singular fractional order systems. ISA Trans. 2017, 69, 1–9. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. State feedback H∞ control of commensurate fractional-order systems. Int. J. Syst. Sci. 2014, 45, 363–372. [Google Scholar] [CrossRef]
- Marir, S.; Chadli, M.; Basin, M. Bounded real lemma for singular linear continuous-time fractional-order systems. Automatica 2022, 135, 109962. [Google Scholar] [CrossRef]
- Di, Y.; Zhang, J.-X.; Zhang, X.F. Robust stabilization of descriptor fractional-order interval systems with uncertain derivative matrices. Appl. Math. Comput. 2023, 453, 128076. [Google Scholar] [CrossRef]
- Zhang, L.X.; Zhang, J.-X.; Zhang, X.F. Generalized criteria for admissibility of singular fractional order systems. Fractal Fract. 2023, 7, 363. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation | Description |
|---|---|
| Initialization | Set the fractional order ; system matrices E, A, B, S, tolerance, and step size parameters, including the number of iterations N; the iteration step size ; the number of iterations of K ; the initial increase step size of K ; and the initial decrease step size . |
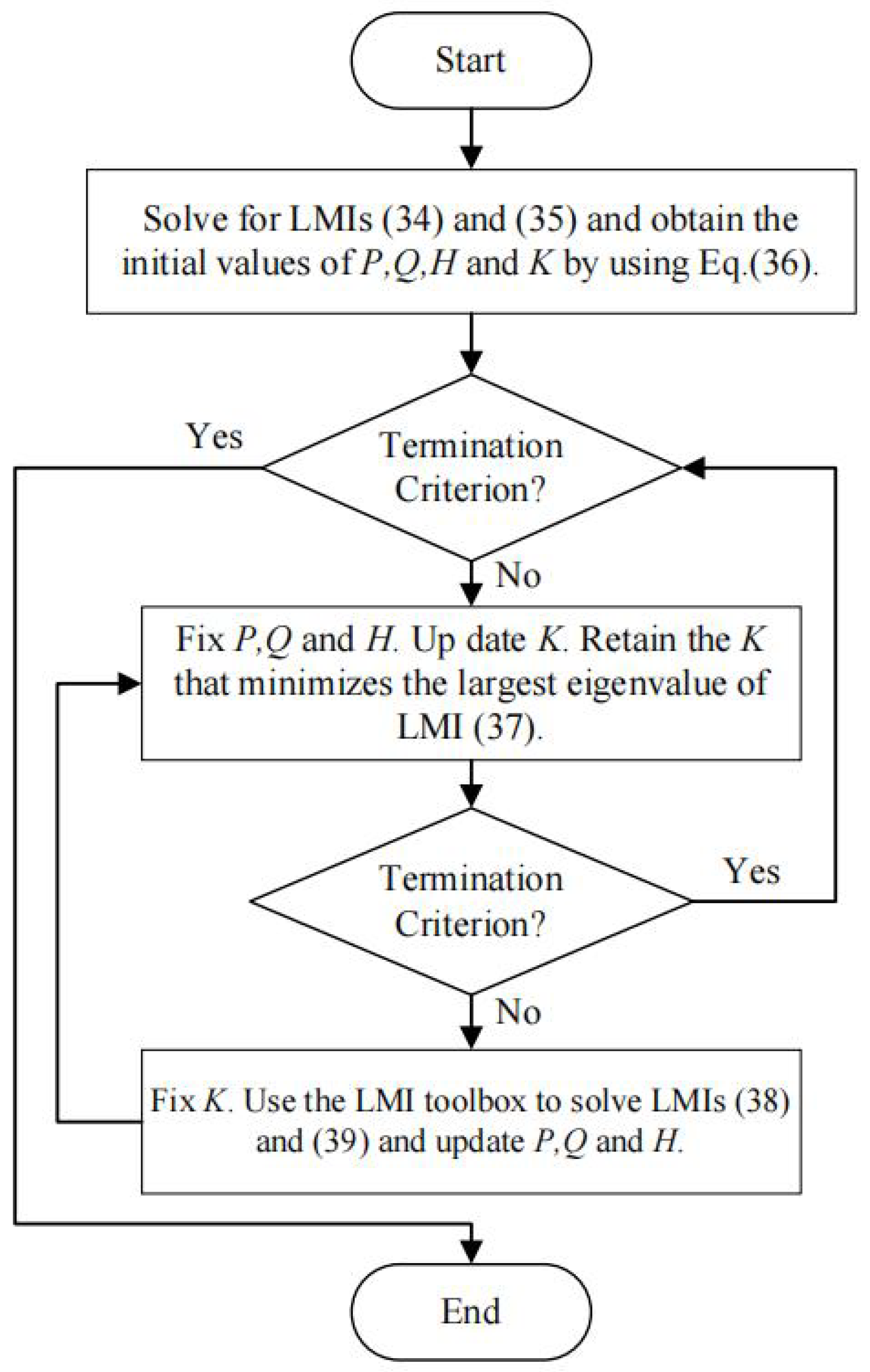
| Solve the initial LMI system | Use MATLAB LMI toolbox to solve the LMIs (34)–(36) to obtain the initial values , and . |
| Inner iteration: update K | With P, Q, and H fixed, the MATLAB LMI toolbox is used to solve LMI (38) to update the initial value of K in the internal iteration. Then, update K using increasing step size or the decreasing step size for, at most, iterations. Evaluate eigenvalues of (37) to check feasibility. |
| Step size adjustment | For the K obtained after each internal iteration, if the maximum positive eigenvalue of (37) increases, reduce the step size to half of the original. |
| Then, if the maximum positive eigenvalue of (37) still increases, switch the step size, i.e., switch the increasing step size to a decreasing step size or switch the decreasing step size to an increasing step size. | |
| If the maximum positive eigenvalue of (37) decreases, increase the step size to twice the original. | |
| Then, if the maximum positive eigenvalue of (37) still decreases, continue to increase the step size. | |
| Update P, Q, and H | With K fixed, use MATLAB LMI toolbox to solve the LMI (39) and update P, Q, and H. |
| Termination | If the eigenvalues of LMI (37) are all negative, return optimal K. If not, return the best K obtained and the corresponding eigenvalue condition. |
| Ref. | System Type | Fractional-Order Field | Variables | No Equality Constraints | No Bilinear Problem |
|---|---|---|---|---|---|
| Theorem 3 in [31] | Singular FOSs | 6 | ✓ | × | |
| Theorem 2 in [32] | Singular FOSs | 5 | ✓ | × | |
| Theorem 1 in [29] | Singular FOSs | 4 | × | ✓ | |
| Theorem 1 in [28] | FOSs | 4 | ✓ | ✓ | |
| Our Theorems 1 and 2 | Singular FOSs | 2/3 | ✓ | ✓ | |
| Our Corollary 1 | Singular FOSs | 1 | ✓ | ✓ | |
| Our Theorem 3 | Singular FOSs | 3 | ✓ | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, X.; Wang, Q.-G.; Boutat, D. Distinctive LMI Formulations for Admissibility and Stabilization Algorithms of Singular Fractional-Order Systems with Order Less than One. Fractal Fract. 2025, 9, 470. https://doi.org/10.3390/fractalfract9070470
Wang X, Zhang X, Wang Q-G, Boutat D. Distinctive LMI Formulations for Admissibility and Stabilization Algorithms of Singular Fractional-Order Systems with Order Less than One. Fractal and Fractional. 2025; 9(7):470. https://doi.org/10.3390/fractalfract9070470
Chicago/Turabian StyleWang, Xinhai, Xuefeng Zhang, Qing-Guo Wang, and Driss Boutat. 2025. "Distinctive LMI Formulations for Admissibility and Stabilization Algorithms of Singular Fractional-Order Systems with Order Less than One" Fractal and Fractional 9, no. 7: 470. https://doi.org/10.3390/fractalfract9070470
APA StyleWang, X., Zhang, X., Wang, Q.-G., & Boutat, D. (2025). Distinctive LMI Formulations for Admissibility and Stabilization Algorithms of Singular Fractional-Order Systems with Order Less than One. Fractal and Fractional, 9(7), 470. https://doi.org/10.3390/fractalfract9070470