
Inverse Problem for a Time-Dependent Source in Distributed-Order Time-Space Fractional Diffusion Equations


Abstract
1. Introduction
2. Preliminaries
- 1.
- For , let be a completely monotonic function, that is
- 2.
- for .
- 3.
- If is continuous and bounded on the interval , then it holds that
- 1.
- 2.
- ,
- 3.
- for .
3. Regularity of the Solution for the Direct Problem
4. Uniqueness of the Inverse Problem
5. Variational Problem
6. Conjugate Gradient Method
- 1.
- Begin by setting the initial guess for the source function as and initialize the iteration counter to ;
- 2.
- For the current iteration, solve the direct problem by taking . Evaluate the residual defined as , which quantifies the difference between the computed solution and the observed data;
- 3.
- Determine the gradient of the objective functional, , and set the initial search direction as ;
- 4.
- Continue the following iterative steps until the specified convergence criterion is satisfied:
- Determine the optimal step length by applying the previously derived formula or criteria;
- Update the estimate for the source function via ;
- Recalculate the residual for the updated source term: ;
- Evaluate the conjugate gradient parameter as , which ensures the efficiency and direction of the subsequent search;
- Adjust the descent direction based on the conjugate gradient update ;
- Increment the iteration index, setting ;
- 5.
- Upon convergence, output the final approximation to the source function, denoted by .
7. Numerical Experiments
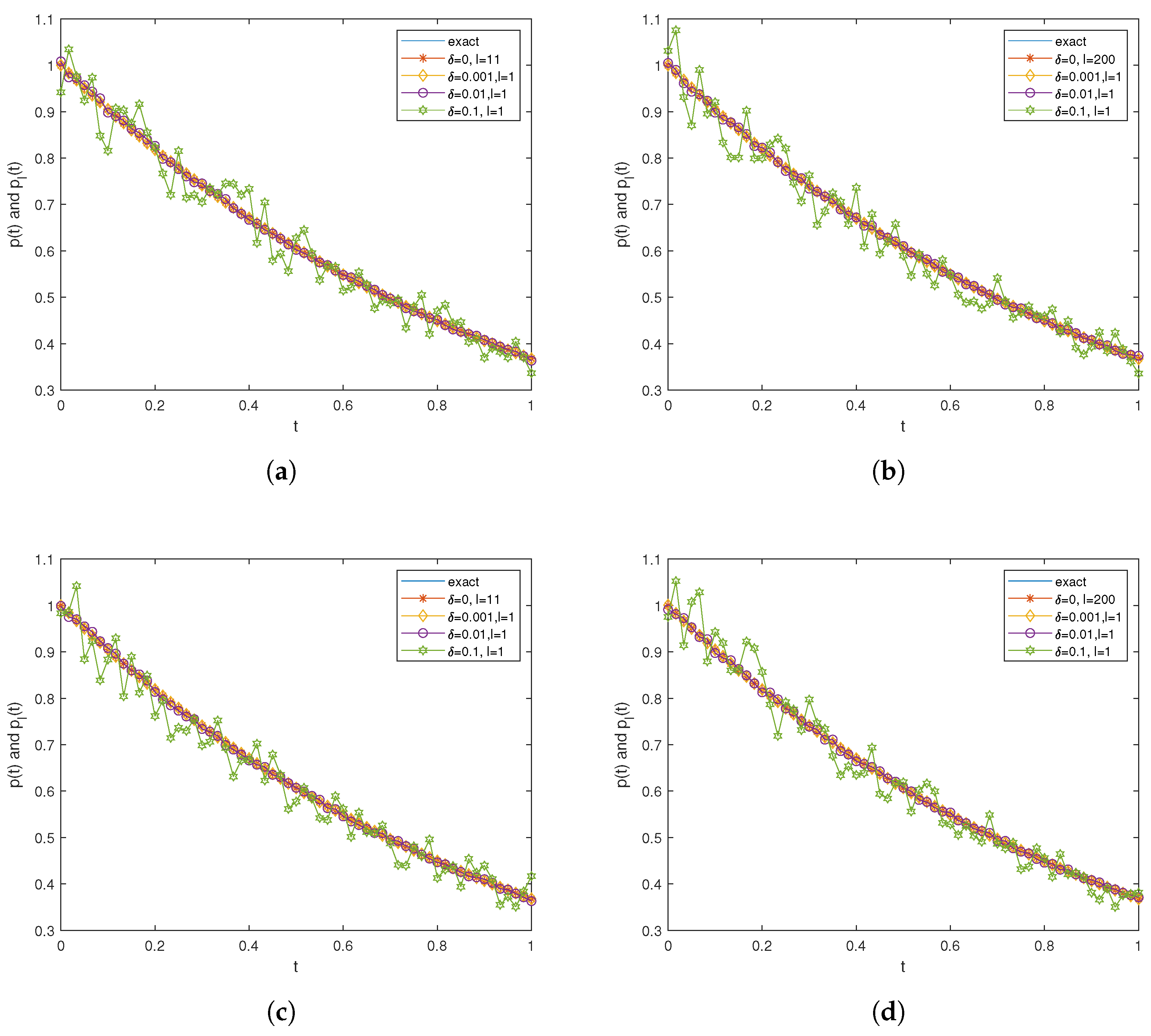
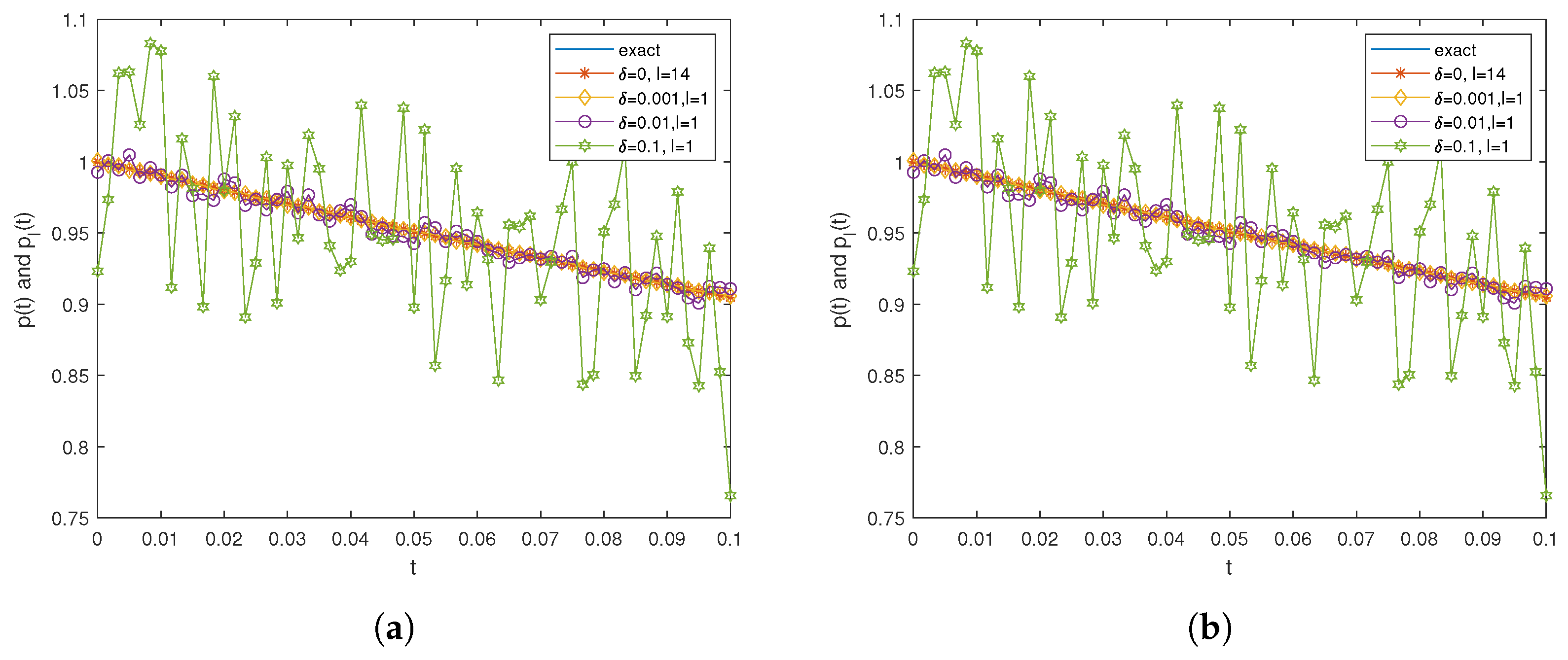
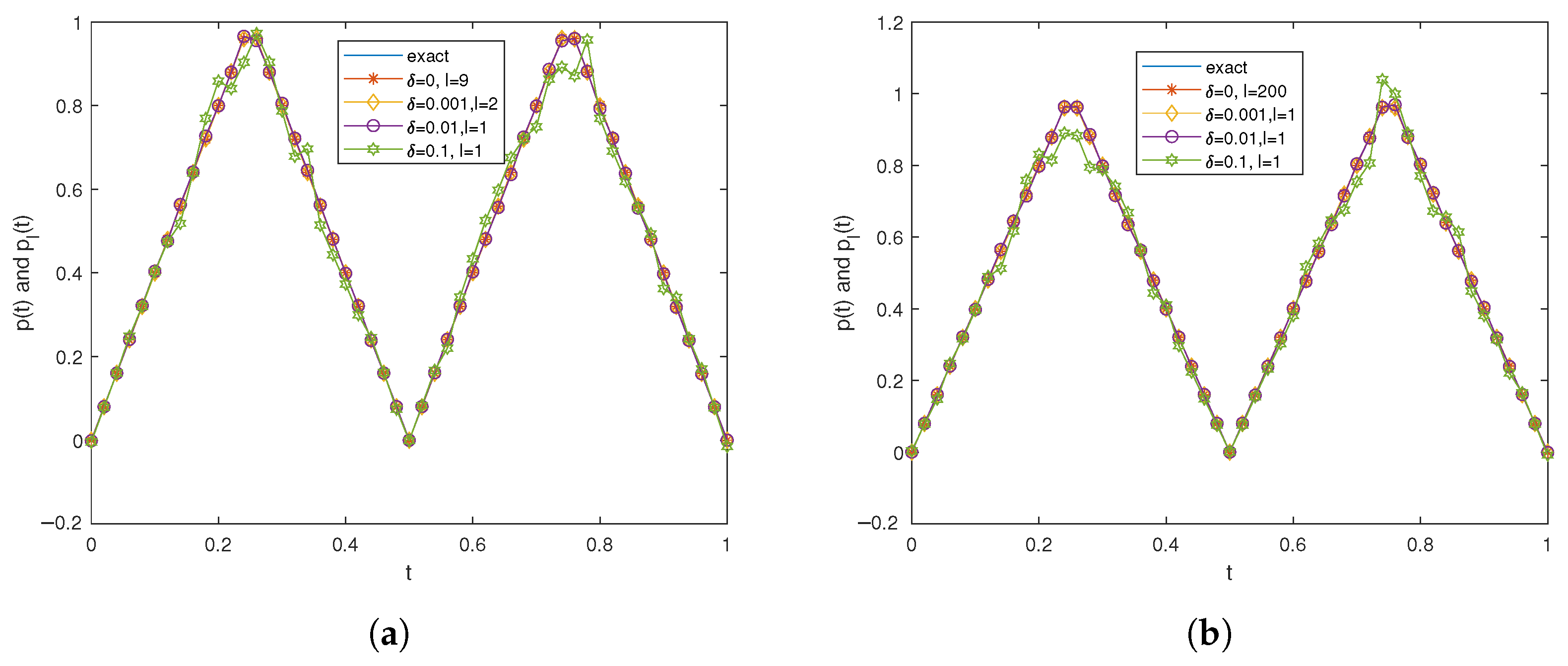
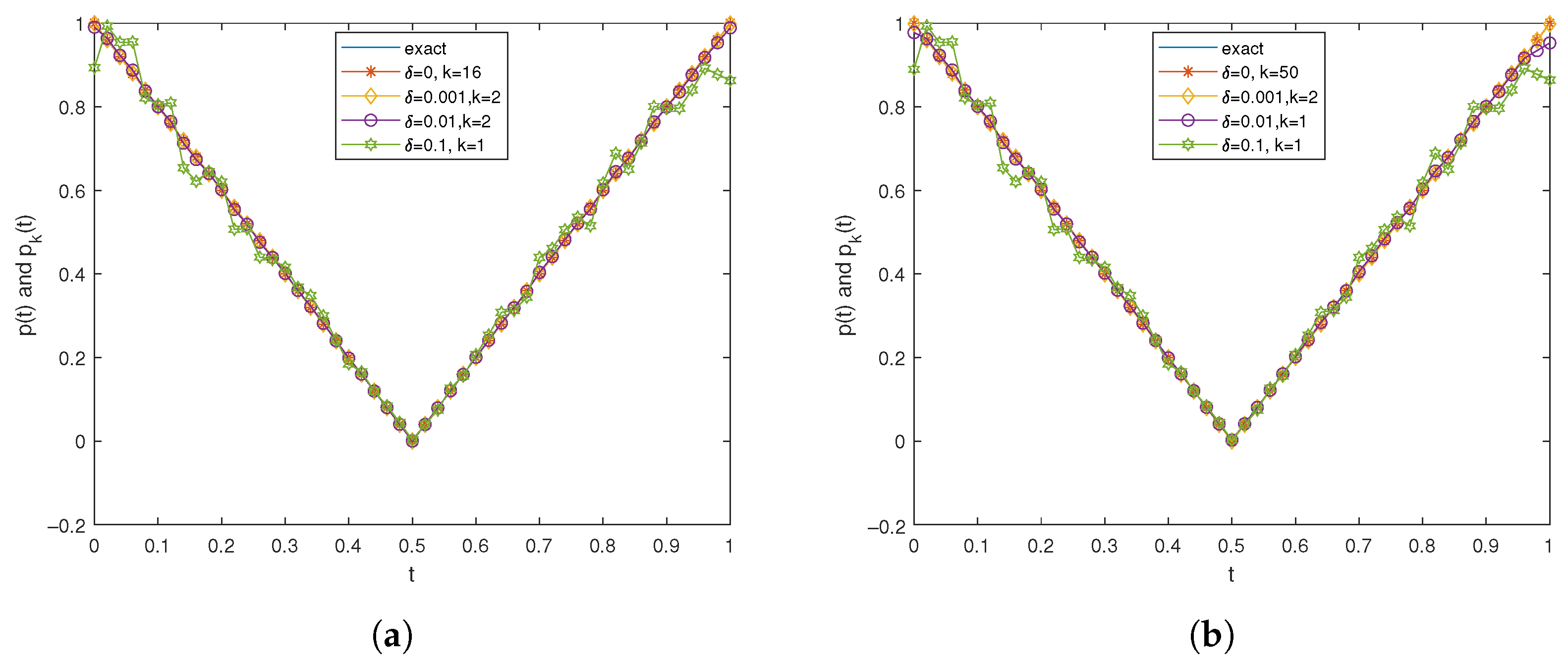
- One-dimensional case We consider three types of examples: continuous smooth monotonic decreasing functions, functions with sharp points, and discontinuous step functions. We compare the images corresponding to two values of , namely, and . Additionally, the root mean square error (RMSE) is defined as follows:
- Two-dimensional case To demonstrate the effectiveness of the proposed method, two illustrative examples have been selected for validation in this paper. In these examples, we fix the , rather than blindly analyzing numerical examples.
8. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Caputo, M. Mean fractional-order-derivatives differential equations and filters. Annali dell’Universita di Ferrara 1995, 41, 73–84. [Google Scholar] [CrossRef]
- Mainardi, F.; Mura, A.; Pagnini, G.; Gorenflo, R. Time-fractional diffusion of distributed order. J. Vib. Control 2008, 14, 1267–1290. [Google Scholar] [CrossRef]
- Sokolov, I.M.; Chechkin, A.V.; Klafter, J. Natural and Modified Forms of Distributed-Order Fractional Diffusion Equations; Fractional Dynamics: Recent Advances; World Scientific Publishing: Hackensack, NJ, USA, 2012; pp. 107–127. [Google Scholar]
- Bu, W.P.; Ji, L.; Tang, Y.F.; Zhou, J. Space-time finite element method for the distributed-order time fractional reaction diffusion equations. Appl. Numer. Math. 2020, 152, 446–465. [Google Scholar] [CrossRef]
- Habibirad, A.; Azin, H.; Hesameddini, E. A capable numerical meshless scheme for solving distributed order time-fractional reaction-diffusion equation. Chaos Soliton Fract. 2023, 166, 112931. [Google Scholar] [CrossRef]
- Mohammadi-Firouzjaeiand, H.; Adibi, H.; Dehghan, M. Local discontinuous Galerkin method for distributed-order time-fractional diffusion-wave equation: Application of laplace transform. Math. Methods Appl. Sci. 2021, 44, 4923–4937. [Google Scholar] [CrossRef]
- Jia, J.H. Analysis of a hidden-memory variably distributed-order time-fractional diffusion equation. Fractal Fract. 2022, 6, 627. [Google Scholar] [CrossRef]
- Sandev, T.; Tomovski, Z.; Crnkovic, B. Generalized distributed order diffusion equations with composite time fractional derivative. Comput. Math. Appl. 2017, 73, 1028–1040. [Google Scholar] [CrossRef]
- Jiang, D.J.; Li, Z.Y.; Liu, Y.; Yamamoto, M. Weak unique continuation property and a related inverse source problem for time-fractional diffusion-advection equations. Inverse Probl. 2017, 33, 055013. [Google Scholar] [CrossRef]
- Jin, B.T.; Rundell, W. A tutorial on inverse problems for anomalous diffusion processes. Inverse Probl. 2015, 31, 035003. [Google Scholar] [CrossRef]
- Sakamoto, K.; Yamamoto, M. Initial value/boundary value problems for fractional diffusion-wave equations and applications to some inverse problems. J. Math. Anal. Appl. 2011, 382, 426–447. [Google Scholar] [CrossRef]
- Yan, X.B.; Wei, T. Inverse space-dependent source problem for a time-fractional diffusion equation by an adjoint problem approach. J. Inverse Ill-Posed Probl. 2019, 27, 1–16. [Google Scholar] [CrossRef]
- Jin, B.T.; Kian, Y. Recovery of a distributed order fractional derivative in an unknown medium. Commun. Math. Sci. 2023, 21, 1791–1813. [Google Scholar] [CrossRef]
- Liu, J.J.; Sun, C.L.; Yamamoto, M. Recovering the weight function in distributed order fractional equation from interior measurement. Appl. Numer. Math. 2021, 168, 84–103. [Google Scholar] [CrossRef]
- Rundell, W.; Zhang, Z.D. Fractional diffusion: Recovering the distributed fractional derivative from overposed data. Inverse Probl. 2017, 33, 035008. [Google Scholar] [CrossRef]
- Li, Z.Y.; Fujishiro, K.; Li, G.S. Uniqueness in the inversion of distributed orders in ultraslow diffusion equations. J. Comput. Appl. Math. 2020, 369, 112564. [Google Scholar] [CrossRef]
- Ruan, Z.S.; Wang, Z.W. A backward problem for distributed order diffusion equation: Uniqueness and numerical solution. Inverse Probl. Sci. Eng. 2021, 29, 418–439. [Google Scholar] [CrossRef]
- Yuan, L.L.; Cheng, X.L.; Liang, K.W. Solving a backward problem for a distributed-order time fractional diffusion equation by a new adjoint technique. J. Inverse Ill-Posed Probl. 2020, 28, 471–488. [Google Scholar] [CrossRef]
- Jiang, D.J.; Li, Z.Y. Coefficient inverse problem for variable order time-fractional diffusion equations from distributed data. Calcolo 2022, 59, 34. [Google Scholar] [CrossRef]
- Ma, W.J.; Sun, L.L. Inverse potential problem for a semilinear generalized fractional diffusion equation with spatio-temporal dependent coefficients. Inverse Probl. 2023, 39, 015005. [Google Scholar] [CrossRef]
- Zhang, M.M.; Liu, J.J. Identification of a time-dependent source term in a distributed-order time-fractional equation from a nonlocal integral observation. Comput. Math. Appl. 2019, 78, 3375–3389. [Google Scholar] [CrossRef]
- Sun, C.L.; Liu, J.J. An inverse source problem for distributed order time-fractional diffusion equation. Inverse Probl. 2020, 36, 055008. [Google Scholar] [CrossRef]
- Hai, D.N.D. Identifying a space-dependent source term in distributed order time-fractional diffusion equations. Math. Control Relat. Fields 2023, 13, 1008–1022. [Google Scholar] [CrossRef]
- Kubica, A.; Ryszewska, K. Decay of solutions to parabolic-type problem with distributed order Caputo derivative. J. Math. Anal. Appl. 2018, 465, 79–99. [Google Scholar] [CrossRef]
- Lischke, A.; Pang, G.; Gulian, M.; Song, F.; Glusa, C.; Zheng, X.; Mao, Z.; Cai, W.; Meerschaert, M.M.; Ainsworth, M.; et al. What is the fractional Laplacian? A comparative review with new results. J. Comput. Phys. 2020, 404, 109009. [Google Scholar] [CrossRef]
- Tatar, S.; Tnaztepe, R.; Ulusoy, S. Simultaneous inversion for the exponents of the fractional time and space derivatives in the space-time fractional diffusion equation. Appl. Anal. 2016, 95, 1–23. [Google Scholar] [CrossRef]
- Tatar, S.; Tnaztepe, R.; Ulusoy, S. Determination of an unknown source term in a space-time fractional diffusion equation. J. Fract. Calc. Appl. 2015, 6, 83–90. [Google Scholar]
- Tatar, S.; Ulusoy, S. An inverse source problem for a one-dimensional space-time fractional diffusion equation. Appl. Anal. 2015, 94, 2233–2244. [Google Scholar] [CrossRef]
- Ilic, M.; Liu, F.; Turner, I.; Anh, V. Numerical approximation of a fractional-in-space diffusion equation. II-with nonhomogeneous boundary conditions. Fract. Calc. Appl. Anal. 2006, 9, 333–349. [Google Scholar]
- Cheng, X.L.; Yuan, L.L.; Liang, K.W. Inverse source problem for a distributed-order time fractional diffusion equation. J. Inverse Ill-Posed Probl. 2020, 28, 17–32. [Google Scholar] [CrossRef]
- Kilbas, A.A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science Limited: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Brezis, H. Functional Analysis, Sobolev Spaces and Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2011; Volume 2. [Google Scholar]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems, 2nd ed.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Wang, H.M.; Li, Y.S. Numerical solution of backward problem of distributed order time-space fractional diffusion equation. Phys. Scr. 2025, 100, 025252. [Google Scholar] [CrossRef]
- Aimi, A.; Desiderio, L.; Credico, G.D. Partially pivoted ACA based acceleration of the energetic BEM for time-domain acoustic and elastic waves exterior problems. Comput. Math. Appl. 2022, 119, 351–370. [Google Scholar] [CrossRef]
- Morozov, V.A. Methods for Solving Incorrectly Posed Problems; Springer: New York, NY, USA, 1984. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.1 | 1.3 | 1.5 | 1.7 | 1.9 | |
|---|---|---|---|---|---|
| 0.0548 | 0.0602 | 0.0560 | 0.0579 | 0.0593 | |
| 0.0536 | 0.0558 | 0.0573 | 0.0565 | 0.0517 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, H. Inverse Problem for a Time-Dependent Source in Distributed-Order Time-Space Fractional Diffusion Equations. Fractal Fract. 2025, 9, 468. https://doi.org/10.3390/fractalfract9070468
Li Y, Wang H. Inverse Problem for a Time-Dependent Source in Distributed-Order Time-Space Fractional Diffusion Equations. Fractal and Fractional. 2025; 9(7):468. https://doi.org/10.3390/fractalfract9070468
Chicago/Turabian StyleLi, Yushan, and Huimin Wang. 2025. "Inverse Problem for a Time-Dependent Source in Distributed-Order Time-Space Fractional Diffusion Equations" Fractal and Fractional 9, no. 7: 468. https://doi.org/10.3390/fractalfract9070468
APA StyleLi, Y., & Wang, H. (2025). Inverse Problem for a Time-Dependent Source in Distributed-Order Time-Space Fractional Diffusion Equations. Fractal and Fractional, 9(7), 468. https://doi.org/10.3390/fractalfract9070468