
Formation Control of Underactuated AUVs Using a Fractional-Order Sliding Mode Observer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Fractional-order sliding mode observer design: A fractional-order sliding mode observer (FOSMO) is proposed, combining fractional calculus with a double-power approximation law. The fractional-order operator enhances the system’s response capability to high-frequency disturbances, while the double-power approximation law effectively suppresses sliding mode chattering. Additionally, an adaptive gain regulation mechanism is introduced to ensure the system maintains good estimation accuracy and robustness even under unknown disturbance upper-bound conditions.
- (2)
- Formation cooperative control strategy: For multi-AUV formation tasks, a cooperative control strategy based on path parameter negotiation is designed. This method assigns each AUV an independent formation reference point and achieves cooperative consistency through the exchange of path parameters rather than state information, reducing communication requirements and improving the strategy’s adaptability in bandwidth-constrained underwater environments.
- (3)
- Speed adjustment mechanism optimization: For the speed control of follower AUVs, an expected speed adjustment method based on error feedback is proposed. This method uses a hyperbolic tangent function to replace the arctangent function, providing smoother adjustment responses in small error intervals and accelerating system convergence under large error conditions, thereby improving overall control performance and response efficiency.
2. Problem Description
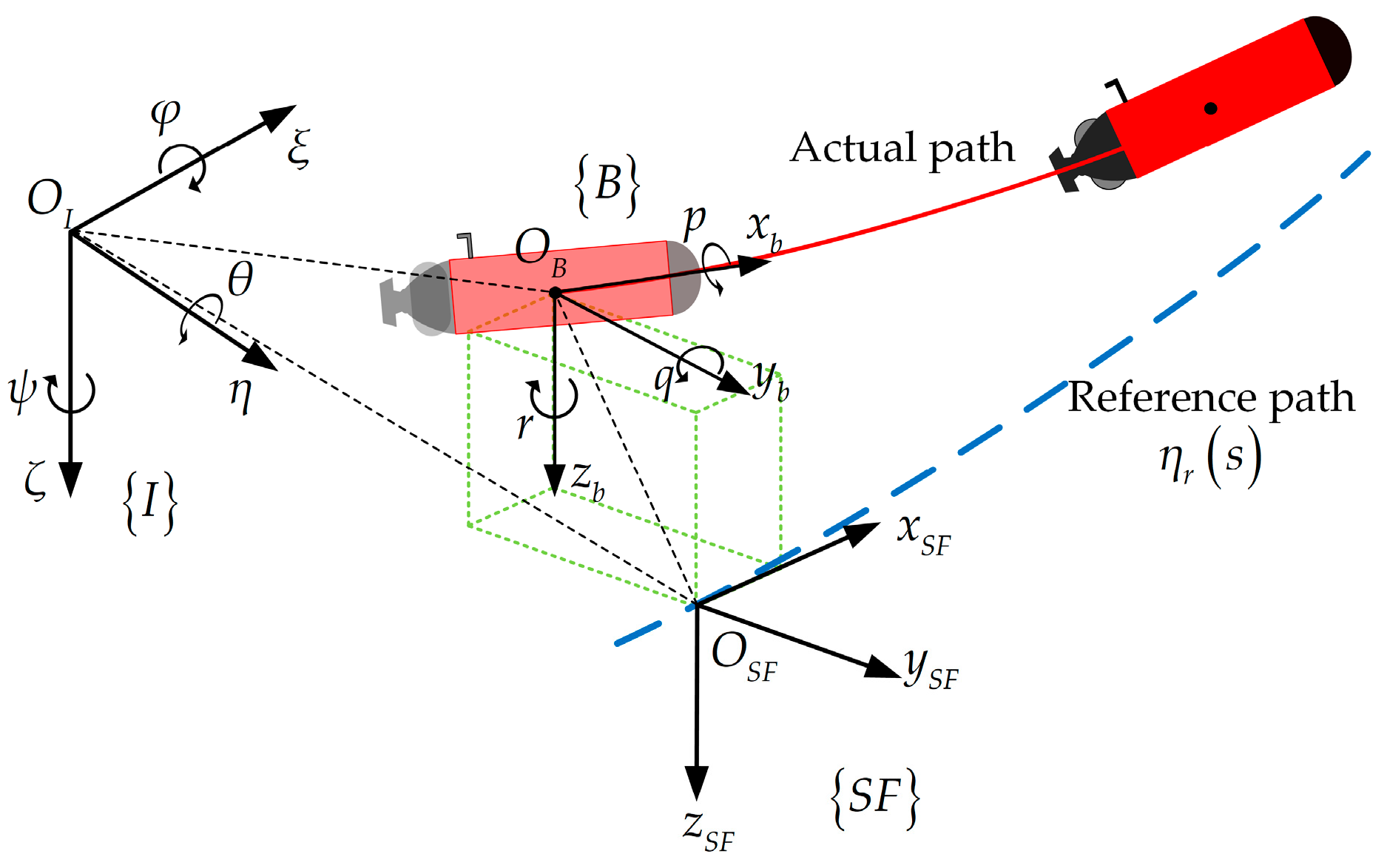
2.1. AUV Model
2.2. Control Objective
3. Following Controller Design
- Kinematic Controller Design: The integral line-of-sight (ILOS) method is used to compensate for path deviations caused by ocean currents. Based on this, a kinematic controller is constructed using the backstepping method. By adjusting the navigation heading angle to stabilize the position error, the desired velocity control law and angular velocity control law for the path reference point are derived. These laws provide reference signals for subsequent dynamic control.
- Dynamic Controller Design: To enhance system robustness, a fractional-order sliding mode observer is designed to estimate disturbances, modeling errors, and other lumped uncertainties. The desired velocity output from the kinematic controller serves as a reference signal. Combined with the introduced desired forward velocity, an integral sliding mode control method is employed to design the control law, thereby achieving precise control of the AUV.
3.1. Kinematic Controller Design
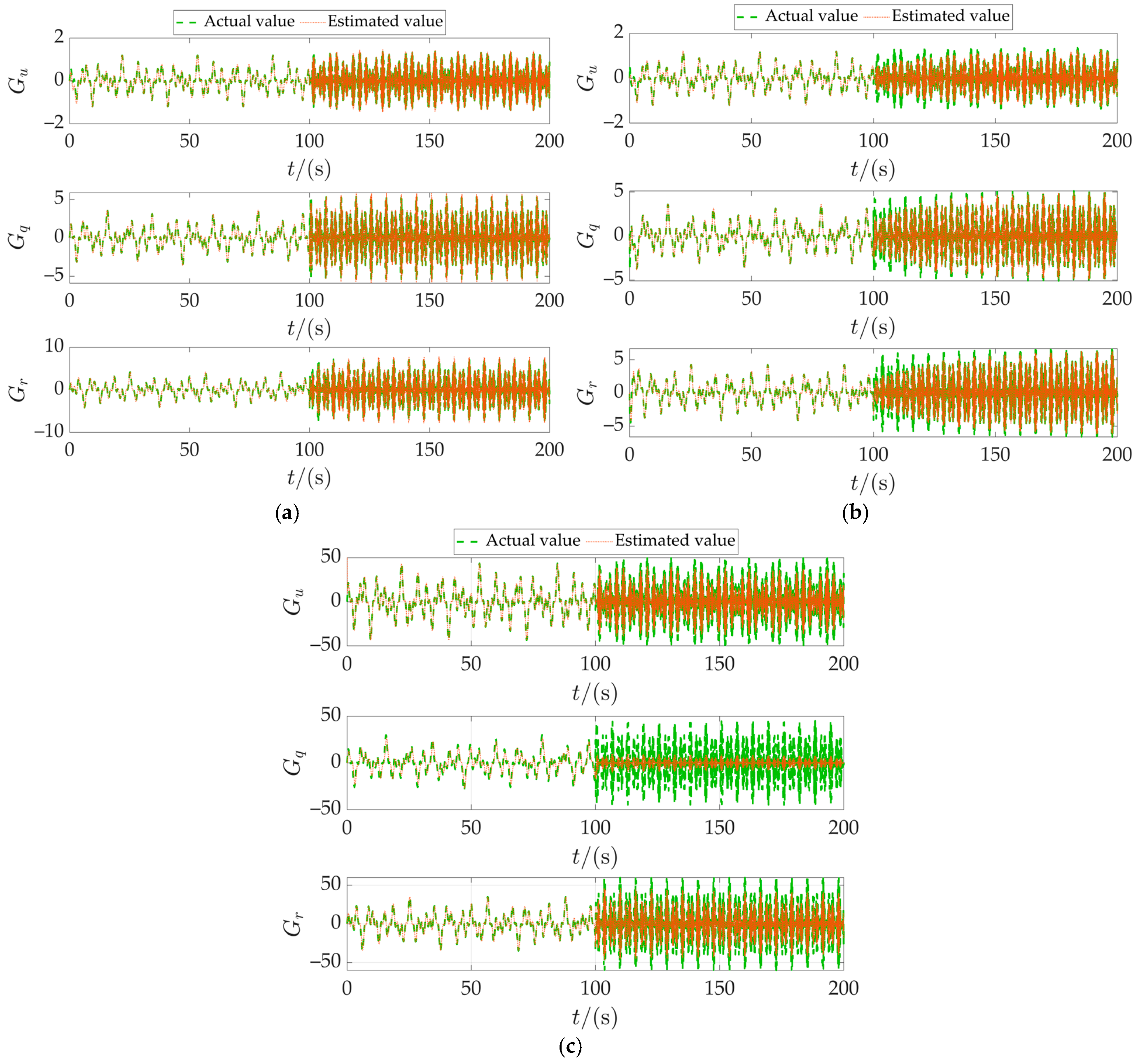
3.2. Fractional-Order Sliding Mode Disturbance Observer Design
3.3. Dynamic Controller Design
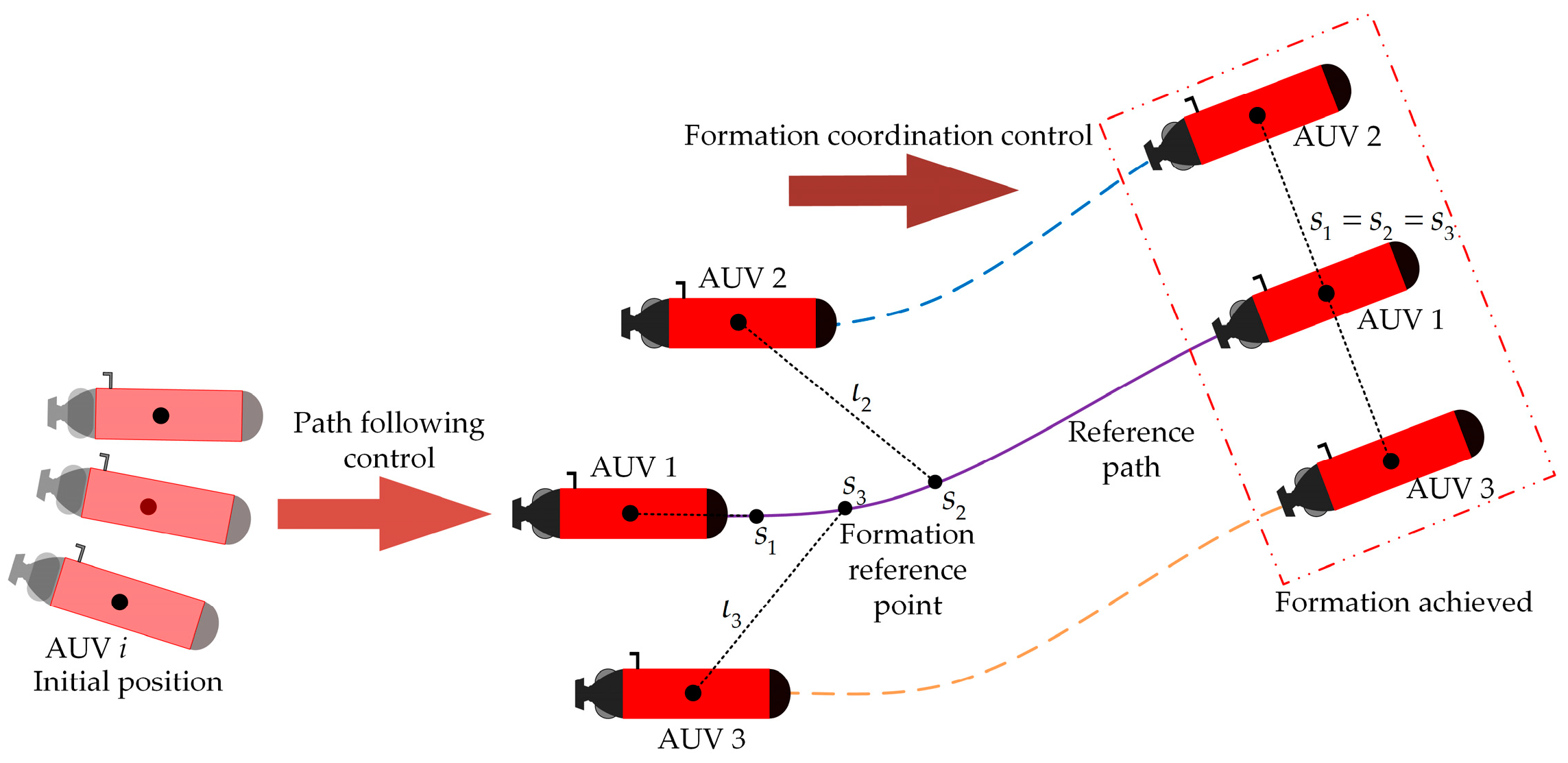
4. Formation Coordination Controller Design
4.1. Principles of Controller Design
- Each AUV executes its path-following control law to ensure its trajectory stably converges to the assigned path. This precise spatial control forms the foundation of formation coordination.
- Based on information exchange between robots, a coordination control law is designed to dynamically adjust followers’ expected speed values. This enables temporal coordination within the formation, achieving a stable and orderly formation configuration.
4.2. Coordination Controller Design
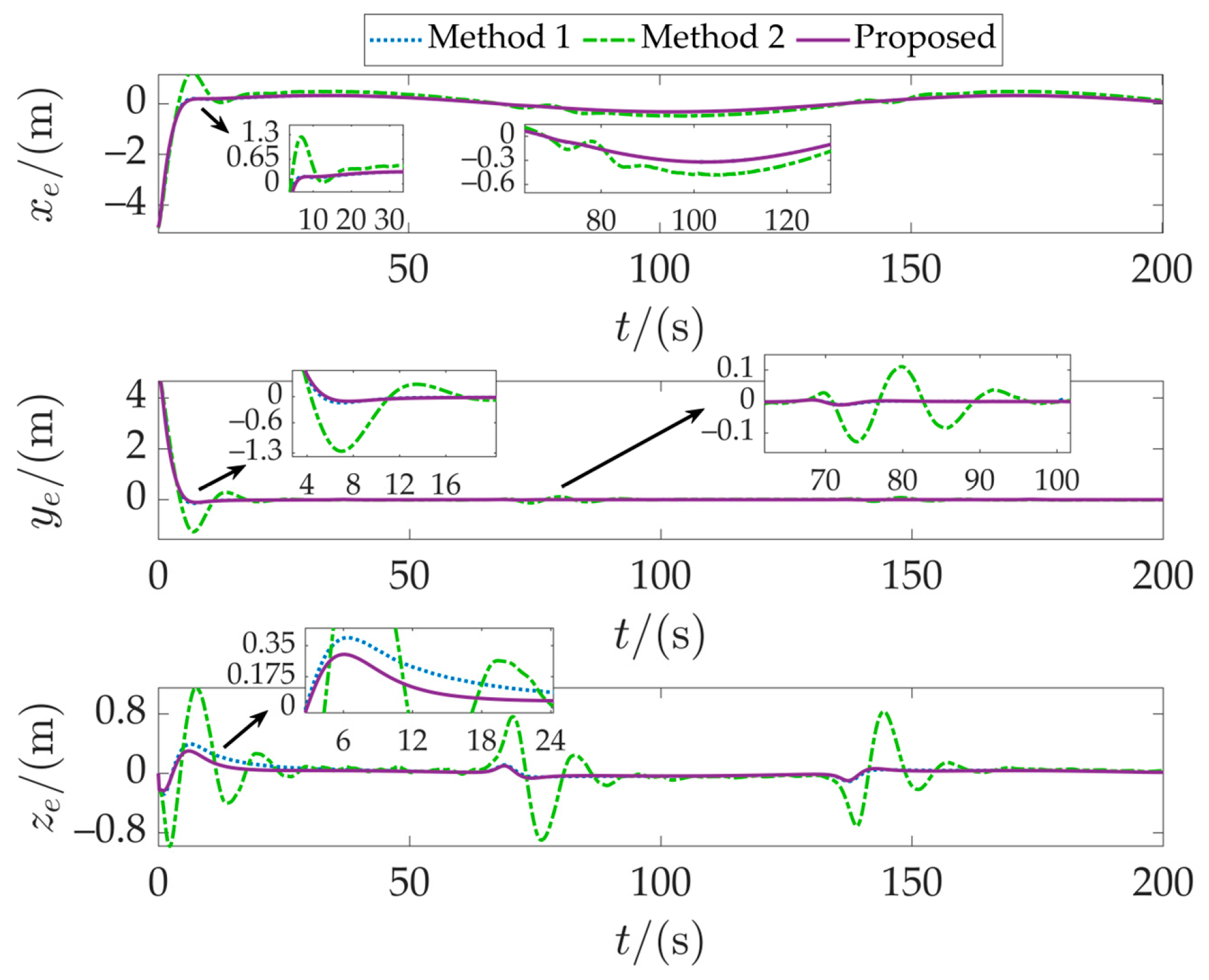
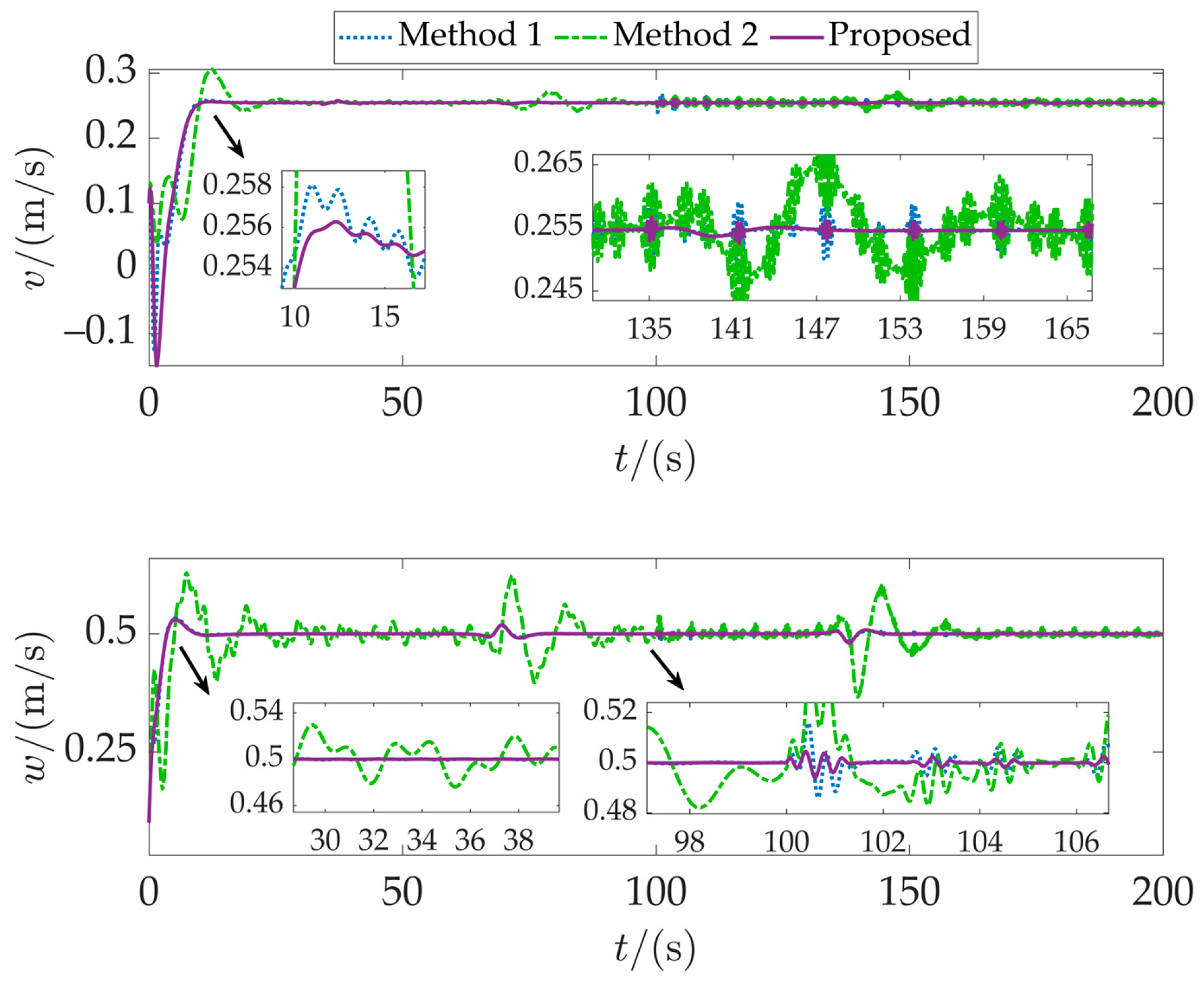
5. Numerical Simulation and Result Analysis
5.1. Case 1: Single AUV Path-Following
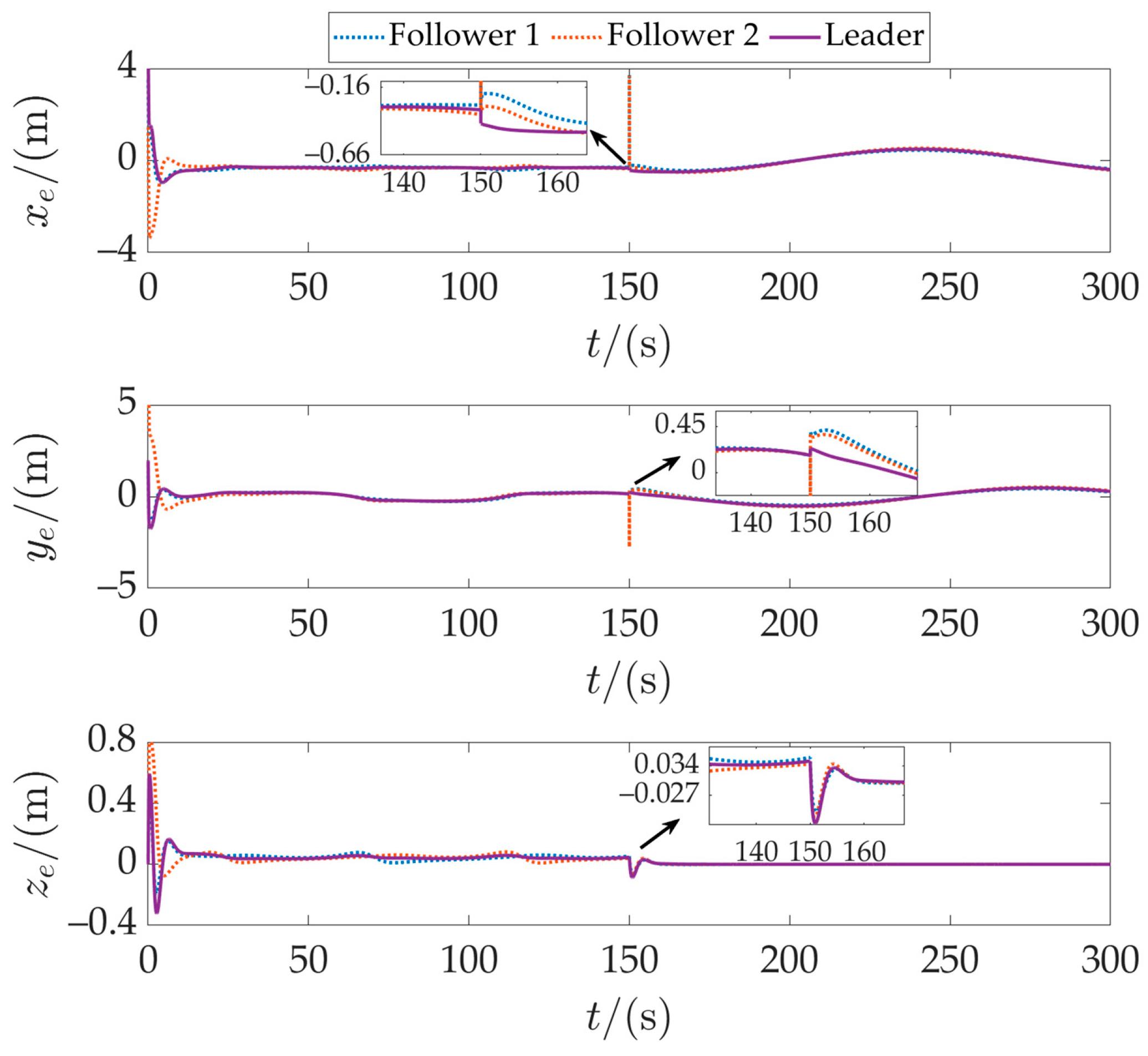
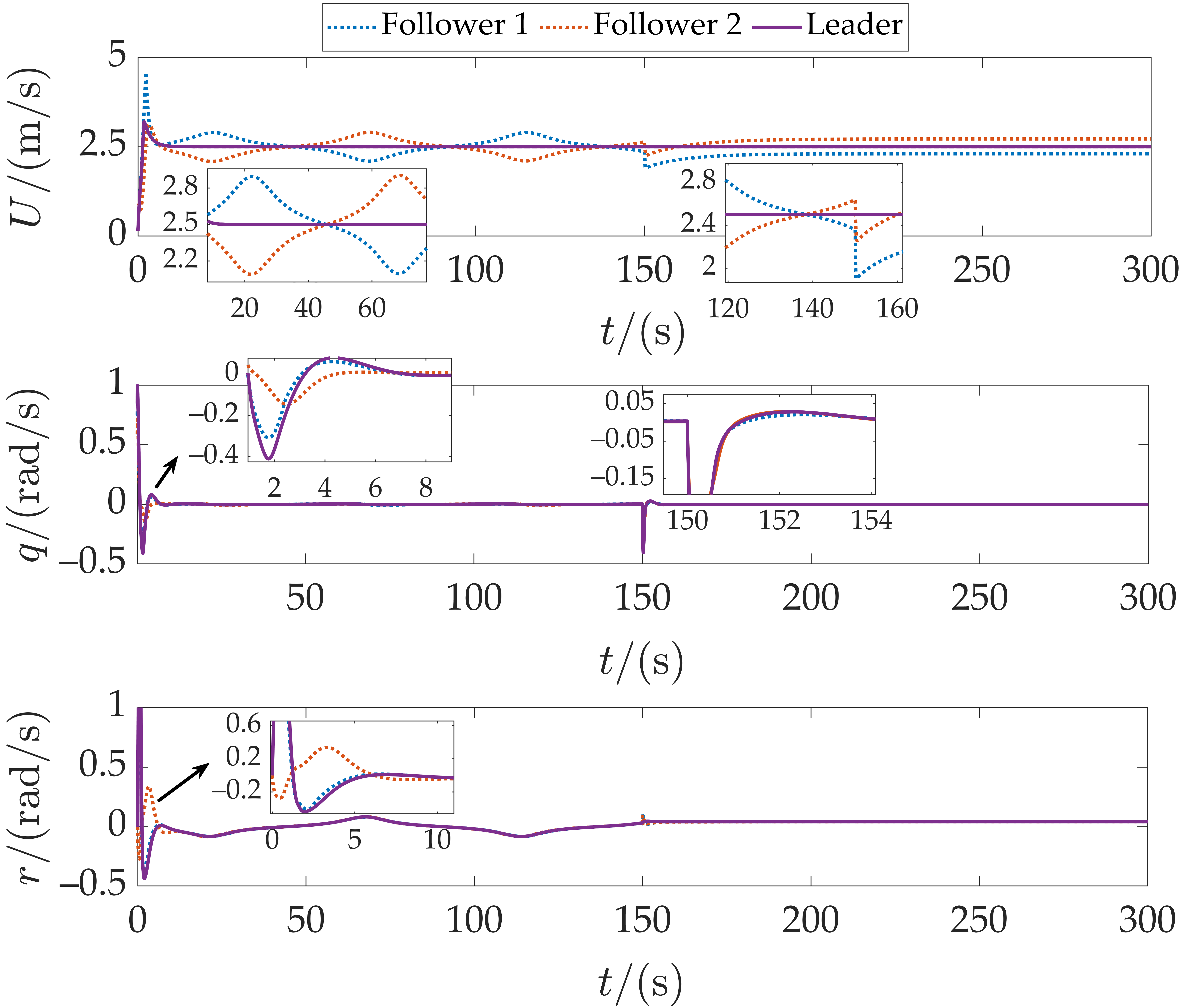
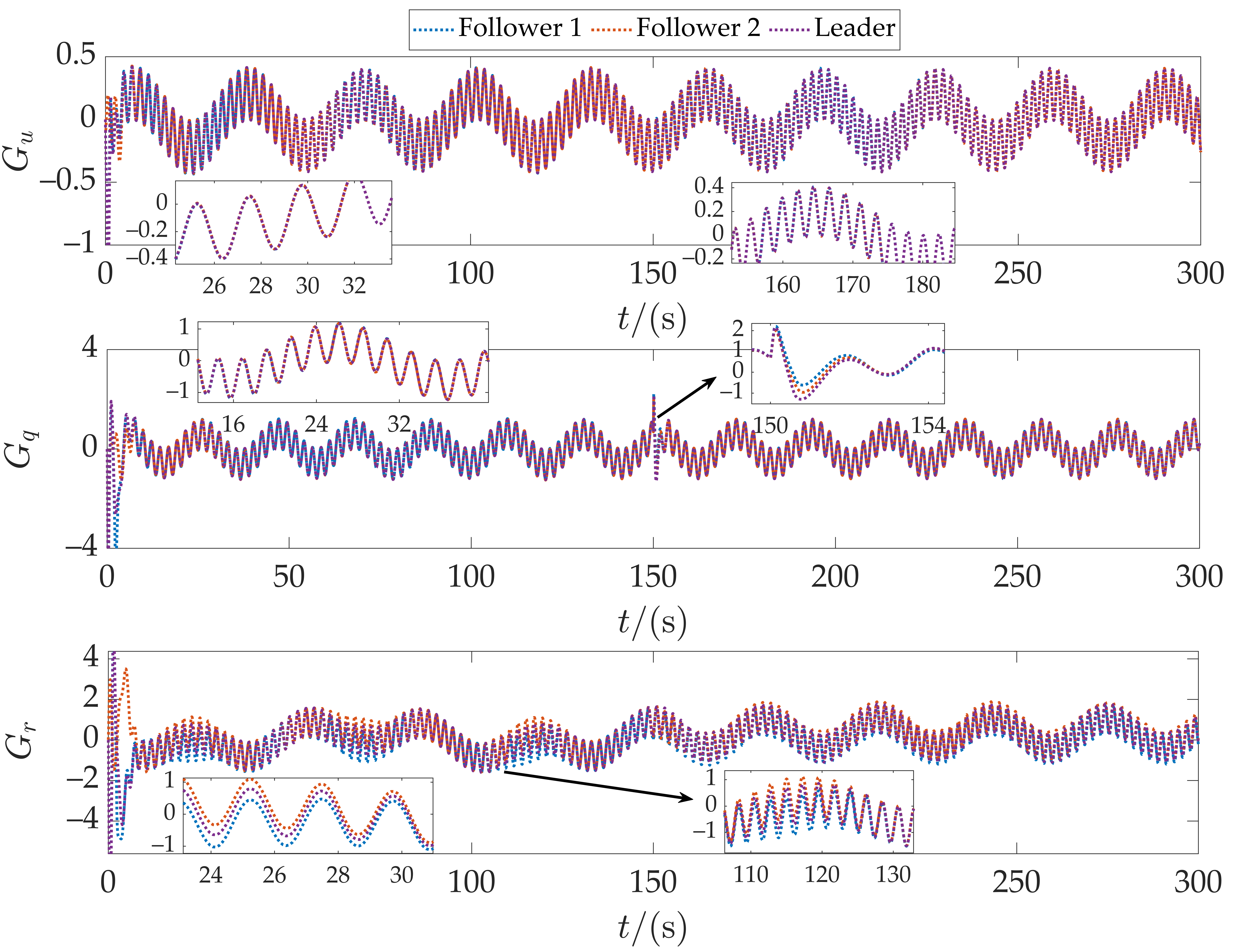
5.2. Case 2: AUV Formation Change and Maintenance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, L.; Xie, M.; Zhang, Y. A Review of Path Following, Trajectory Tracking, and Formation Control for Autonomous Underwater Vehicles. Drones 2025, 9, 286. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Salazar, R.; Campos, A.; Fuentes, V.; Abdelkefi, A. A Review on the Modeling, Materials, and Actuators of Aquatic Unmanned Vehicles. Ocean Eng. 2019, 172, 257–285. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Li, Z.; Min, G.; Ren, P.; Luo, C.; Zhao, L.; Luo, C. Ubiquitous and Robust UxV Networks: Overviews, Solutions, Challenges, and Opportunities. IEEE Netw. 2024, 38, 26–34. [Google Scholar] [CrossRef]
- Yan, J.; Guan, X.; Yang, X.; Chen, C.; Luo, X. A Survey on Integration Design of Localization, Communication, and Control for Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2025, 12, 6300–6324. [Google Scholar] [CrossRef]
- Li, J.; Yuan, R.; Zhang, H. Research on multiple AUVs formation control algorithm based on leader-follower method. Chin. J. Sci. Instrum. 2019, 40, 237–246. [Google Scholar] [CrossRef]
- Yang, E.; Gu, D. Nonlinear Formation-Keeping and Mooring Control of Multiple Autonomous Underwater Vehicles. IEEE/ASME Trans. Mechatron. 2007, 12, 164–178. [Google Scholar] [CrossRef]
- Bian, J.; Xiang, J. Three-Dimensional Coordination Control for Multiple Autonomous Underwater Vehicles. IEEE Access 2019, 7, 63913–63920. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Sliding Mode Based Neural Adaptive Formation Control of Underactuated AUVs with Leader-Follower Strategy. Appl. Ocean Res. 2020, 94, 101971. [Google Scholar] [CrossRef]
- Cui, R.; Sam Ge, S.; Voon Ee How, B.; Sang Choo, Y. Leader–Follower Formation Control of Underactuated Autonomous Underwater Vehicles. Ocean Eng. 2010, 37, 1491–1502. [Google Scholar] [CrossRef]
- Millán, P.; Orihuela, L.; Jurado, I.; Rubio, F.R. Formation Control of Autonomous Underwater Vehicles Subject to Communication Delays. IEEE Trans. Control Syst. Technol. 2014, 22, 770–777. [Google Scholar] [CrossRef]
- Park, B.S. Adaptive Formation Control of Underactuated Autonomous Underwater Vehicles. Ocean Eng. 2015, 96, 1–7. [Google Scholar] [CrossRef]
- Yu, X. Research on Consensus Based Underwater Multi-Agent Formation Control. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2024. [Google Scholar]
- Yan, T.; Xu, Z.; Yang, S.X. Consensus Formation Tracking for Multiple AUV Systems Using Distributed Bioinspired Sliding Mode Control. IEEE Trans. Intell. Veh. 2023, 8, 1081–1092. [Google Scholar] [CrossRef]
- Xiang, X. Research on Path Following and Coordinated Control for Second-Order Nonholonomic AUVs. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2010. [Google Scholar]
- Zhang, X.; Zhou, L.; Xing, W.; Yao, S. Formation consensus control of multi-AUV system with switching topology. J. Harbin Eng. Univ. 2023, 44, 587–593. [Google Scholar]
- Lewis, M.A.; Tan, K.-H. High Precision Formation Control of Mobile Robots Using Virtual Structures. Auton. Robot. 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Ma, X.-W.; Bai, G.-Q.; Sha, Y.; Liu, J. Multi-Autonomous Underwater Vehicle Formation Control and Cluster Search Using a Fusion Control Strategy at Complex Underwater Environment. Ocean Eng. 2020, 216, 108048. [Google Scholar] [CrossRef]
- Balch, T.; Arkin, R.C. Behavior-Based Formation Control for Multirobot Teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar] [CrossRef]
- Xu, P. Behavior-Based Formation Control of Multi-AUV. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2013. [Google Scholar]
- Wang, Q.; He, B.; Zhang, Y.; Yu, F.; Huang, X.; Yang, R. An Autonomous Cooperative System of Multi-AUV for Underwater Targets Detection and Localization. Eng. Appl. Artif. Intell. 2023, 121, 105907. [Google Scholar] [CrossRef]
- He, L.; Zhang, Y.; Fan, G.; Liu, Y.; Wang, X.; Yuan, Z. Three-Dimensional Path Following Control of Underactuated AUV Based on Nonlinear Disturbance Observer and Adaptive Line-of-Sight Guidance. IEEE Access 2024, 12, 83911–83924. [Google Scholar] [CrossRef]
- He, L.; Zhang, Y.; Li, S.; Li, B.; Yuan, Z. Three-Dimensional Path Following Control for Underactuated AUV Based on Ocean Current Observer. Drones 2024, 8, 672. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved Line-of-Sight Trajectory Tracking Control of under-Actuated AUV Subjects to Ocean Currents and Input Saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Ali, N.; Tawiah, I.; Zhang, W. Finite-Time Extended State Observer Based Nonsingular Fast Terminal Sliding Mode Control of Autonomous Underwater Vehicles. Ocean Eng. 2020, 218, 108179. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, H.; Sun, Y.; Qin, H. Adaptive Prescribed Performance Second-Order Sliding Mode Tracking Control of Autonomous Underwater Vehicle Using Neural Network-Based Disturbance Observer. Ocean Eng. 2022, 260, 111939. [Google Scholar] [CrossRef]
- Luo, W.; Liu, S. Disturbance Observer Based Nonsingular Fast Terminal Sliding Mode Control of Underactuated AUV. Ocean Eng. 2023, 279, 114553. [Google Scholar] [CrossRef]
- Rong, S.; Wang, H.; Li, H.; Sun, W.; Gu, Q.; Lei, J. Performance-Guaranteed Fractional-Order Sliding Mode Control for Underactuated Autonomous Underwater Vehicle Trajectory Tracking with a Disturbance Observer. Ocean Eng. 2022, 263, 112330. [Google Scholar] [CrossRef]
- Wang, J.; Shao, C.; Chen, X.; Chen, Y. Fractional-Order DOB-Sliding Mode Control for a Class of Noncommensurate Fractional-Order Systems with Mismatched Disturbances. Math. Meth. Appl. Sci. 2021, 44, 8228–8242. [Google Scholar] [CrossRef]
- Wang, J.; Shao, C.; Chen, Y.-Q. Fractional Order Sliding Mode Control via Disturbance Observer for a Class of Fractional Order Systems with Mismatched Disturbance. Mechatronics 2018, 53, 8–19. [Google Scholar] [CrossRef]
- Sun, G.; Wu, L.; Kuang, Z.; Ma, Z.; Liu, J. Practical Tracking Control of Linear Motor via Fractional-Order Sliding Mode. Automatica 2018, 94, 221–235. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, Q.; Sun, X.; Zhu, H.; Lu, C. Fractional-Order Sliding Mode Control for a Bearingless Induction Motor Based on Improved Load Torque Observer. J. Frankl. Inst. 2021, 358, 3701–3725. [Google Scholar] [CrossRef]
- Dou, B.; Yue, X. Disturbance Observer-Based Fractional-Order Sliding Mode Control for Free-Floating Space Manipulator with Disturbance. Aerosp. Sci. Technol. 2023, 132, 108061. [Google Scholar] [CrossRef]
- Li, W.; Qin, K.; Li, G.; Shi, M.; Zhang, X. Robust Bipartite Tracking Consensus of Multi-Agent Systems via Neural Network Combined with Extended High-Gain Observer. ISA Tran. 2023, 136, 31–45. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Jiang, B.; Karimi, H.R.; Gao, C. An Event-Triggered Mechanism to Observer-Based Sliding Mode Control of Fractional-Order Uncertain Switched Systems. ISA Trans. 2023, 135, 115–129. [Google Scholar] [CrossRef] [PubMed]
- Guha, D.; Roy, P.K.; Banerjee, S. Adaptive Fractional-Order Sliding-Mode Disturbance Observer-Based Robust Theoretical Frequency Controller Applied to Hybrid Wind–Diesel Power System. ISA Trans. 2023, 133, 160–183. [Google Scholar] [CrossRef] [PubMed]
- Fei, J.; Wang, Z.; Fang, Y. Self-Evolving Recurrent Chebyshev Fuzzy Neural Sliding Mode Control for Active Power Filter. IEEE Trans. Industr. Inform. 2023, 19, 2729–2739. [Google Scholar] [CrossRef]
- Liang, B.; Zheng, S.; Ahn, C.K.; Liu, F. Adaptive Fuzzy Control for Fractional-Order Interconnected Systems With Unknown Control Directions. IEEE Trans. Fuzzy Syst. 2022, 30, 75–87. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2021; ISBN 978-1-119-57505-4. [Google Scholar]
- Caharija, W.; Pettersen, K.Y.; Bibuli, M.; Calado, P.; Zereik, E.; Braga, J.; Gravdahl, J.T.; Sørensen, A.J.; Milovanović, M.; Bruzzone, G. Integral Line-of-Sight Guidance and Control of Underactuated Marine Vehicles: Theory, Simulations, and Experiments. IEEE Trans. Control Syst. Technol. 2016, 24, 1623–1642. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A.M. Direct and Indirect Adaptive Integral Line-of-Sight Path-Following Controllers for Marine Craft Exposed to Ocean Currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Advances in Industrial Control. In Fractional-Order Systems and Controls; Springer: London, UK, 2010; ISBN 978-1-84996-334-3. [Google Scholar]
- Bian, X.; Mu, C.; Yan, Z. Coordinated control for multi-UUV formation motion on a set of given paths. J. Harbin Inst. Technol. 2013, 45, 106–111. [Google Scholar]
- He, L.; Zhang, Y.; Liu, Y.; Bai, C.; Li, L. Backstepping Sliding Mode Control for Path Following of Underactuated AUV Affected by Ocean Currents. In Proceedings of the 2024 IEEE International Conference on Unmanned Systems (ICUS), Nanjing, China, 18–20 October 2024; pp. 858–864. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Xie, M.; Zhang, Y.; Li, S.; Li, B.; Yuan, Z.; Bai, C. Formation Control of Underactuated AUVs Using a Fractional-Order Sliding Mode Observer. Fractal Fract. 2025, 9, 465. https://doi.org/10.3390/fractalfract9070465
He L, Xie M, Zhang Y, Li S, Li B, Yuan Z, Bai C. Formation Control of Underactuated AUVs Using a Fractional-Order Sliding Mode Observer. Fractal and Fractional. 2025; 9(7):465. https://doi.org/10.3390/fractalfract9070465
Chicago/Turabian StyleHe, Long, Mengting Xie, Ya Zhang, Shizhong Li, Bo Li, Zehui Yuan, and Chenrui Bai. 2025. "Formation Control of Underactuated AUVs Using a Fractional-Order Sliding Mode Observer" Fractal and Fractional 9, no. 7: 465. https://doi.org/10.3390/fractalfract9070465
APA StyleHe, L., Xie, M., Zhang, Y., Li, S., Li, B., Yuan, Z., & Bai, C. (2025). Formation Control of Underactuated AUVs Using a Fractional-Order Sliding Mode Observer. Fractal and Fractional, 9(7), 465. https://doi.org/10.3390/fractalfract9070465