
Strong Convergence of a Modified Euler—Maruyama Method for Mixed Stochastic Fractional Integro—Differential Equations with Local Lipschitz Coefficients



{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
3. An Equivalent mSVIE
4. Existence and Uniqueness of Solution to mSVIE (7)
4.1. A Modified EM Scheme
4.2. Existence and Uniqueness
5. Strong Convergence Analysis of the Modified EM Approximation
5.1. The Mean—Square Convergence Theorem of the Modified EM Method (14)
5.2. Strong Convergence Order Analysis
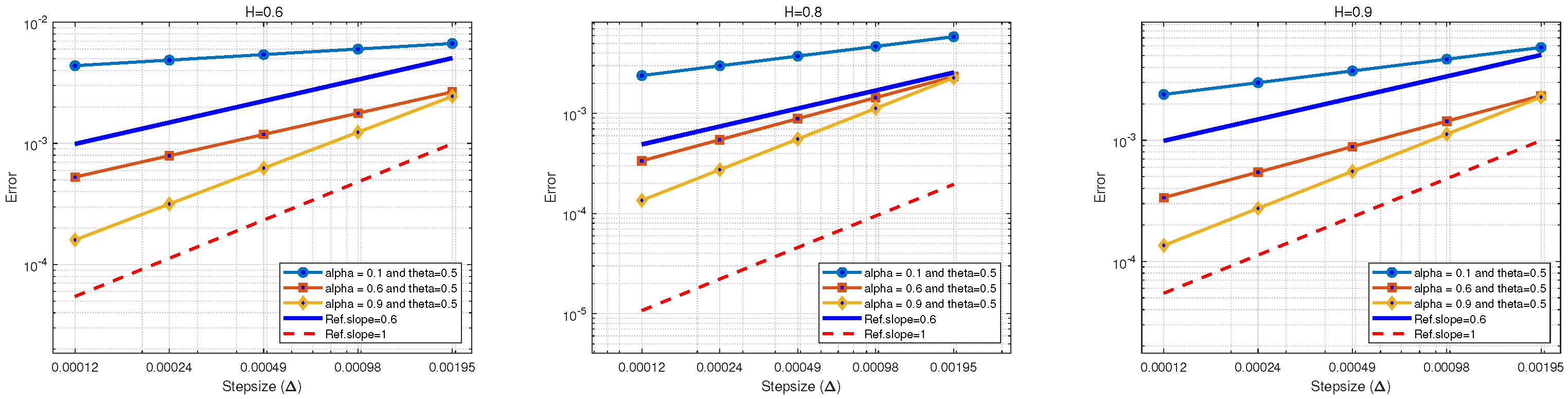
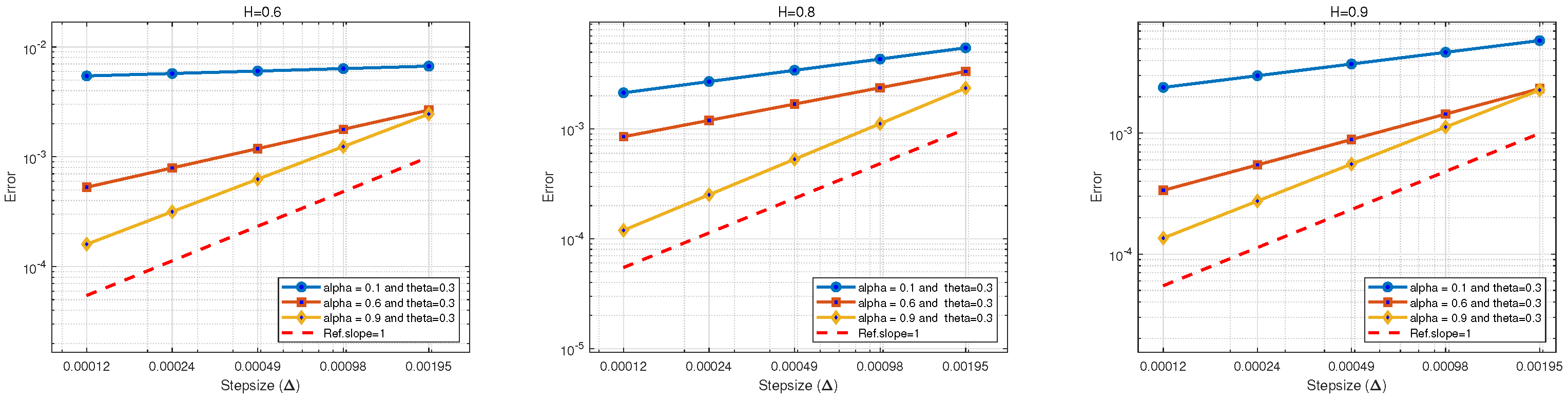
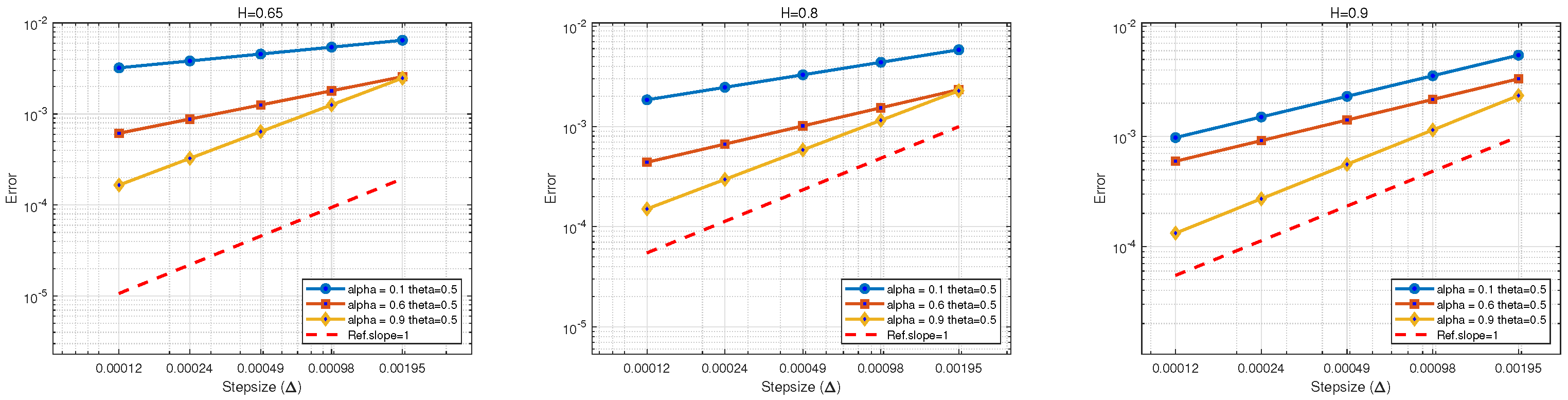
6. Numerical Experiments
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Proof of Lemma 1
Appendix B. The Proof of Lemma 2
Appendix C. The Proof of Lemma 3
Appendix D. The Proof of Lemma 4
Appendix E. The Proof of Theorem 1
- Step 1: The Picard sequence . For arbitrary , using inequality (15), let . Then, we have
- Step 2: The Picard sequence is a Cauchy sequence almost surely.We define arbitrary and . We need to argue that, for any , for , orWe writeUsing the Cauchy—Schwarz inequality and Lemma 1, we have the estimateandFurthermore, according to Lemma 2,Similarly, according to Lemma 2,Notice thatand thus,Combining (A3), (12), and (A5), we haveThis means that a.s., hence, a.s. for , especially a.s., as for . Then, we conclude that the Picard sequence is almost surely a Cauchy sequence.
Appendix F. The Proof of Lemma 5
Appendix G. The Proof of Lemma 7
References
- Mounir, Z.L. On the mixed fractional Brownian motion. J. Appl. Math. Stoch. Anal. 2006, 1, 1–9. [Google Scholar]
- Mishura, Y.S. Stochastic Calculus for Fractional Brownian Motion and Related Processes; Springer: Berlin, Germany, 2008. [Google Scholar]
- Liu, W.G.; Luo, J.W. Modified Euler approximation of stochastic differential equation driven by Brownian motion and fractional Brownian motion. Commun. Stat-Theor. Meth. 2017, 46, 7427–7443. [Google Scholar] [CrossRef]
- Liang, H.; Yang, Z.W.; Gao, J.F. Strong superconvergence of the Euler-Maruyama method for linear stochastic Volterra integral equations. J. Comput. Appl. Math. 2017, 317, 447–457. [Google Scholar] [CrossRef]
- Dai, X.J.; Bu, W.P.; Xiao, A.G. Well-posedness and EM approximations for non-Lipschitz stochastic fractional integro-differential equations. J. Comput. Appl. Math. 2019, 356, 377–390. [Google Scholar] [CrossRef]
- Zhang, J.N.; Lv, J.Y.; Huang, J.F.; Tang, Y.F. A fast Euler-Maruyama method for Riemann-Liouville stochastic fractional nonlinear differential equations. Phy. D 2023, 446, 133685. [Google Scholar] [CrossRef]
- Huang, J.F.; Shao, L.X.; Liu, J.H. Euler-Maruyama methods for Caputo tempered fractional stochastic differential equations. Int. J. Comput. Math. 2024, 101, 1113–1131. [Google Scholar] [CrossRef]
- Liu, W.; Mao, X.R. Strong convergence of the stopped Euler-Maruyama method for nonlinear stochastic differential equations. Appl. Math. Comput. 2013, 223, 389–400. [Google Scholar] [CrossRef]
- Song, M.H.; Hu, L.J.; Mao, X.R.; Zhang, L.G. Khasminskii-type theorems for stochastic functional differential equations. Discrete. Cont. Dyn-B 2013, 18, 1697–1714. [Google Scholar] [CrossRef]
- Mao, X.R.; Szpruch, L. Strong convergence and stability of implicit numerical methods for stochastic differential equations with non-globally Lipschitz continuous coefficients. J. Comput. Appl. Math. 2013, 238, 14–28. [Google Scholar] [CrossRef]
- Mao, X.R. The truncated Euler-Maruyama method for stochastic differential equations. J. Comput. Appl. Math. 2015, 290, 370–384. [Google Scholar] [CrossRef]
- Milstein, G.N.; Tretyakov, M.V. Stochastic Numerics for Mathematical Physics; Springer: Berlin, Germany, 2004. [Google Scholar]
- Wang, X.J.; Gan, S.Q. The tamed Milstein method for commutative stochastic differential equations with non-globally Lipschitz continuous coefficients. J. Difference Equ. Appl. 2013, 19, 466–490. [Google Scholar] [CrossRef]
- Wang, X.J.; Gan, S.Q.; Wang, D.S. θ-Maruyama methods for nonlinear stochastic differential delay equations. Appl. Num. Math. 2015, 98, 38–58. [Google Scholar] [CrossRef]
- Li, M.; Huang, C.M.; Hu, Y.Z. Numerical methods for stochastic Volterra integral equations with weakly singular kernels. IMA J. Numer. Anal. 2022, 42, 2656–2683. [Google Scholar] [CrossRef]
- Hutzenthaler, M.; Jentzen, A.; Kloeden, P.E. Strong convergence of an explicit numerical method for SDEs with nonglobally Lipschitz continuous coefficients. Ann. Appl. Proba. 2012, 22, 1611–1641. [Google Scholar] [CrossRef]
- Kamrani, M.; Jamshidi, N. Implicit Euler approximation of stochastic evolution equations with fractional Brownian motion. Commun. Nonlinear Sci. Numer. Simu. 2017, 44, 1–10. [Google Scholar] [CrossRef]
- Anh, P.; Doan, T.; Huong, P. A variation of constant formula for Caputo fractional stochastic differential equations. Stat. Proba. Lett. 2019, 145, 351–358. [Google Scholar] [CrossRef]
- Ford, N.J.; Pedas, A.; Vikerpuur, M. High order approximations of solutions to initial value problems for linear fractional integro-differential equations. Fract. Calc. Appl. Anal. 2023, 26, 2069–2100. [Google Scholar] [CrossRef]
- Mao, X.R. Stochastic Differential Equations and Applications; Horwood Pub Ltd.: Chichester, UK, 1997.
- Higham, D.J.; Mao, X.R.; Stuart, A. Strong convergence of Euler-type methods for nonlinear stochastic differential equations. SIAM J. Numer. Anal. 2003, 40, 1041–1063. [Google Scholar] [CrossRef]
- Yang, Z.W.; Yang, H.Z.; Yao, Z.C. Strong convergence analysis for Volterra integro-differential equations with fractional Brownian motions. J. Comput. Appl. Math. 2021, 383, 113156. [Google Scholar] [CrossRef]
- Liu, W.G.; Jiang, Y.; Li, Z. Rate of convergence of Euler approximation of time-dependent mixed SDEs driven by Brownian motions and fractional Brownian motions. AIMS Math. 2020, 5, 2163–2195. [Google Scholar] [CrossRef]
- Mishura, Y.; Shevchenko, G. Mixed stochastic differential equations with long-range dependence: Existence, uniqueness and convergence of solutions. Comput. Math. Appl. 2012, 64, 3217–3227. [Google Scholar] [CrossRef]
- Nualart, D. The Malliavin Calculus and Related Topics (Probability and Its Applications), 2nd ed.; Springer: Berlin, Germany, 2006. [Google Scholar]
- Biagini, F.; Hu, Y.Z.; Øksendal, B.; Zhang, T.S. Stochastic Calculus for Fractional Brownian Motion and Applications; Cambridge University Press: London, UK, 2008. [Google Scholar]
- Li, L.; Liu, J.G.; Lu, J.F. Fractional stochastic differential equations satisfying fluctuation-dissipation theorem. J. Stat. Phy. 2017, 169, 316–339. [Google Scholar] [CrossRef]
- Costabile, C.; Massabó, I.; Russo, E.; Staino, A. Lattice-based model for pricing contingent claims under mixed fractional Brownian motion. Commun. Nonlinear Sci. Num. Sim. 2023, 118, 107042. [Google Scholar] [CrossRef]
- Lan, G.Q.; Xia, F. Strong convergence rates of modified truncated EM method for stochastic differential equations. J. Comput. Appl. Math. 2018, 334, 1–17. [Google Scholar] [CrossRef]
- Qin, Y.M. Integral and Discrete Inequalities and Their Applications, Volume I: Linear Inequalities; Springer: Berna, Switzerland, 2016. [Google Scholar]
- Rao, B.L.S.P. Parametric estimation for linear stochastic differential equations driven by mixed fractional Brownian motion. Stoch. Anal. Appl. 2018, 36, 767–781. [Google Scholar] [CrossRef]
- Alazemi, F.; Douissi, S.; Sebaiy, K.E. Berry-Esseen bounds and asclts for drift parameter estimator of mixed fractional Ornstein-Uhlenbeck process with discrete observations. Theor. Proba. Appl. 2019, 64, 401–420. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Xu, C. Strong Convergence of a Modified Euler—Maruyama Method for Mixed Stochastic Fractional Integro—Differential Equations with Local Lipschitz Coefficients. Fractal Fract. 2025, 9, 296. https://doi.org/10.3390/fractalfract9050296
Yang Z, Xu C. Strong Convergence of a Modified Euler—Maruyama Method for Mixed Stochastic Fractional Integro—Differential Equations with Local Lipschitz Coefficients. Fractal and Fractional. 2025; 9(5):296. https://doi.org/10.3390/fractalfract9050296
Chicago/Turabian StyleYang, Zhaoqiang, and Chenglong Xu. 2025. "Strong Convergence of a Modified Euler—Maruyama Method for Mixed Stochastic Fractional Integro—Differential Equations with Local Lipschitz Coefficients" Fractal and Fractional 9, no. 5: 296. https://doi.org/10.3390/fractalfract9050296
APA StyleYang, Z., & Xu, C. (2025). Strong Convergence of a Modified Euler—Maruyama Method for Mixed Stochastic Fractional Integro—Differential Equations with Local Lipschitz Coefficients. Fractal and Fractional, 9(5), 296. https://doi.org/10.3390/fractalfract9050296