
Error Analysis of the L1 Scheme on a Modified Graded Mesh for a Caputo–Hadamard Fractional Diffusion Equation

Abstract
1. Introduction
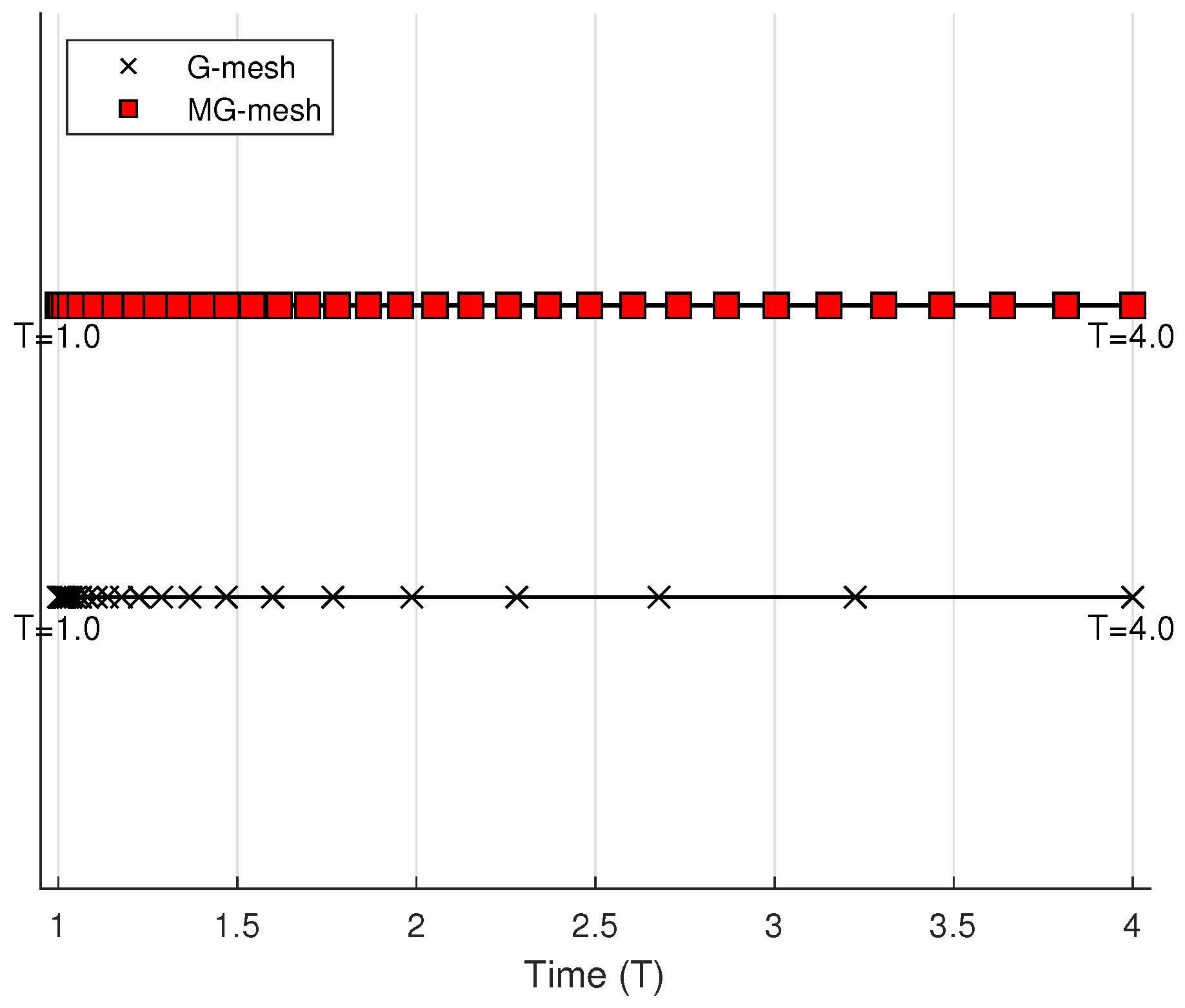
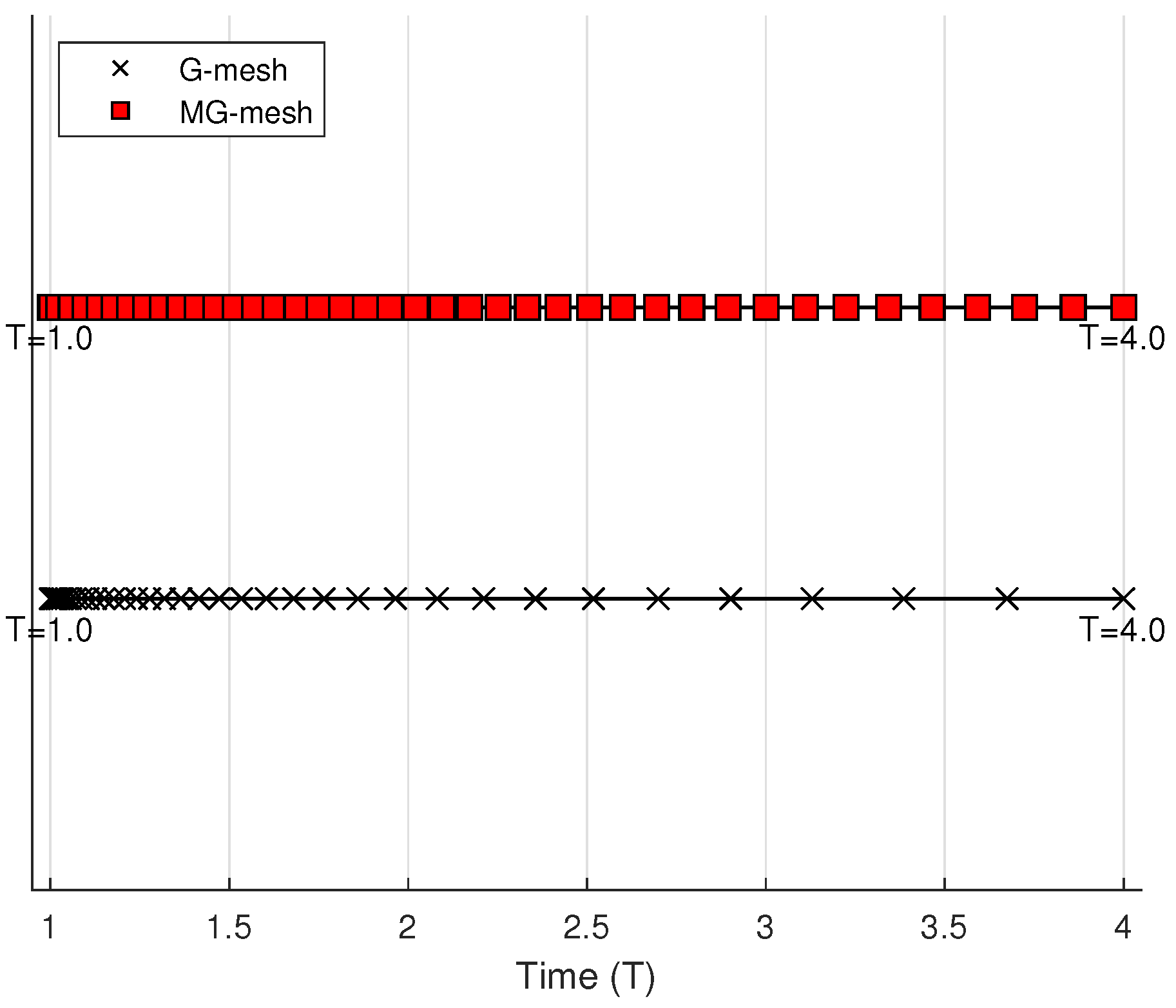
2. A Modified Graded Mesh
3. Discretization Scheme
4. Error Analysis
- 1.
- When . In this case, we should study the estimations of for , for , , respectively.
- 2.
- When . In this case, we will also give the estimations of and .
- 3.
- When . In this case, we mainly discuss the bounds of for and for .
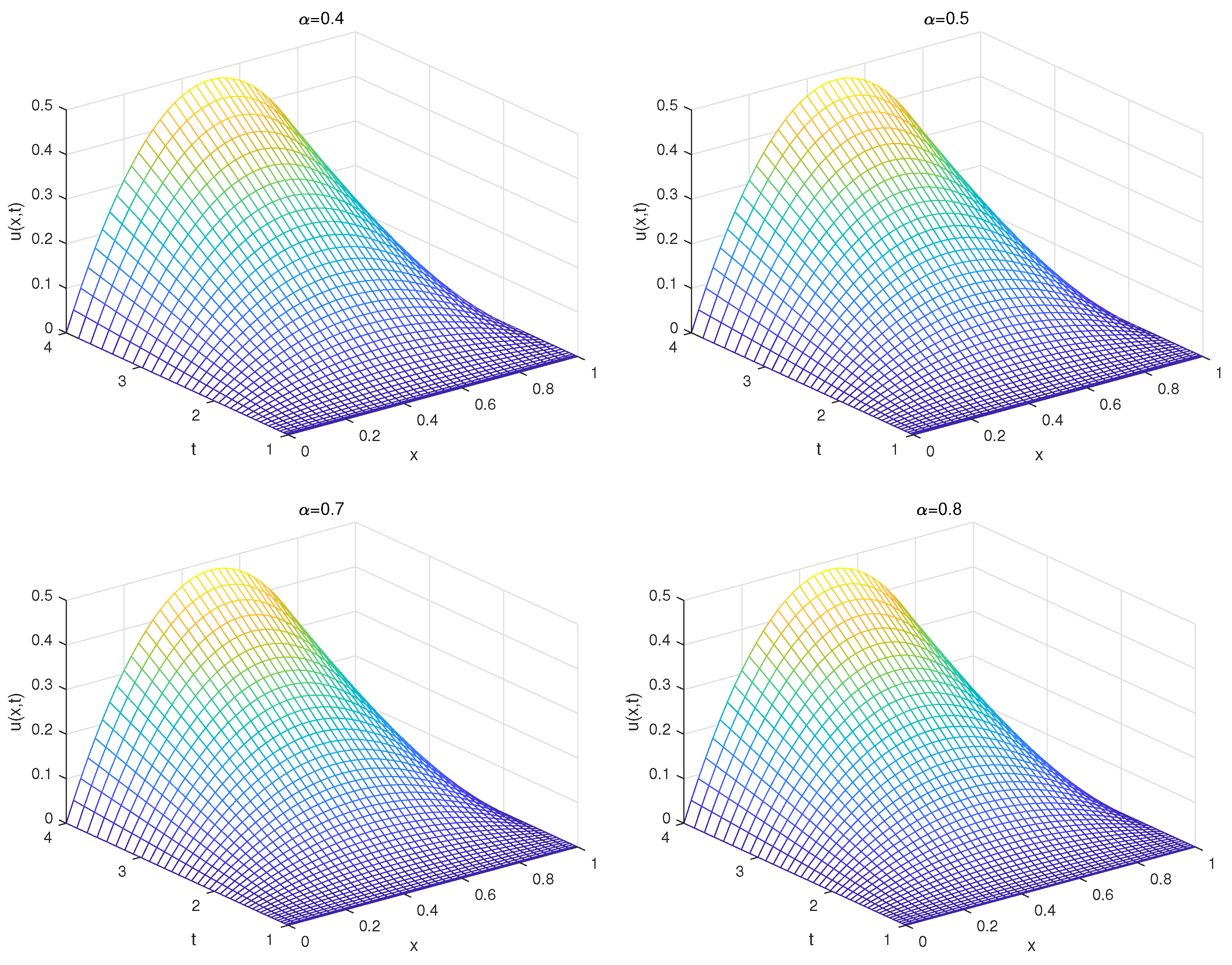
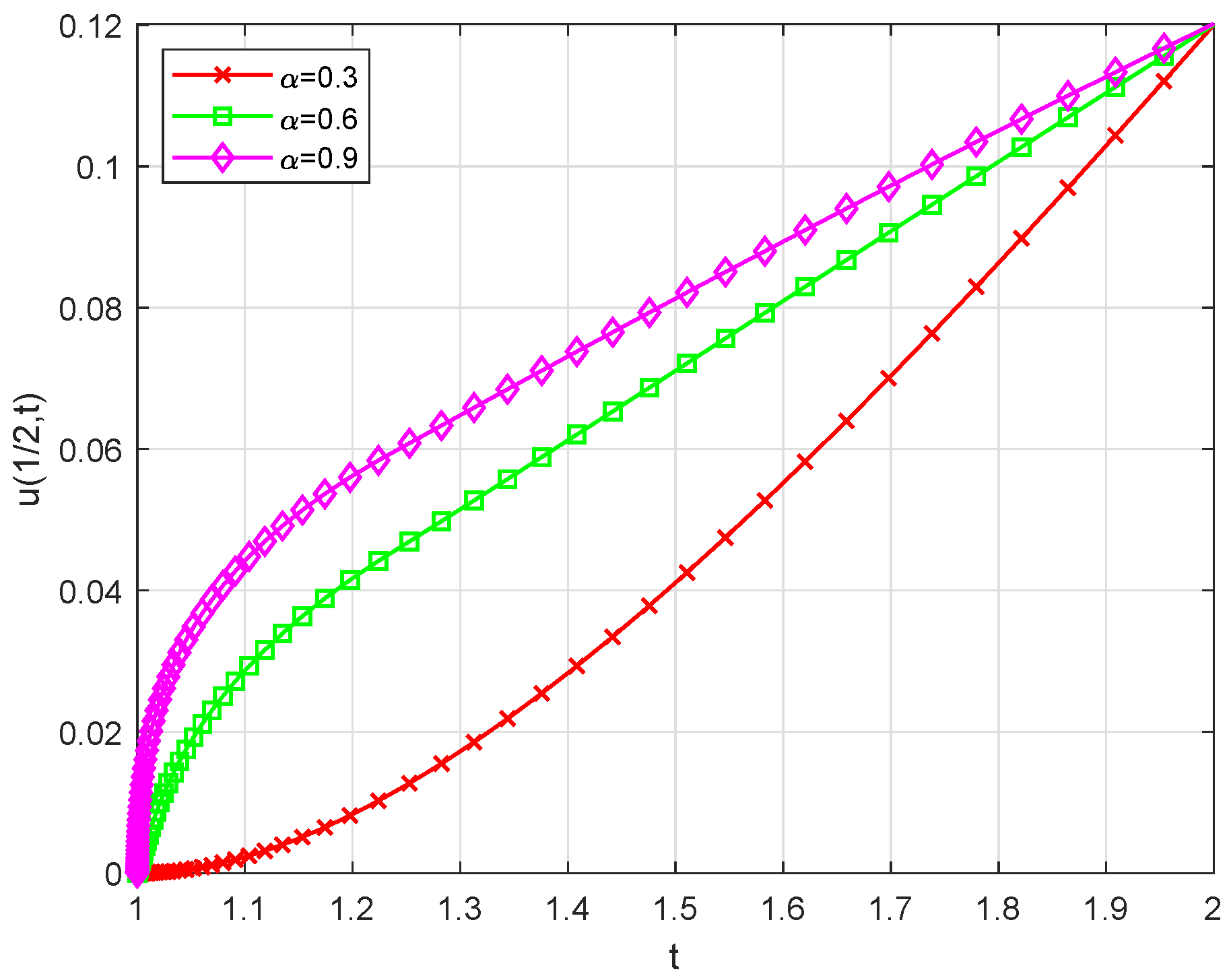
5. Numerical Experiments and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vellappandi, M.; Govindaraj, V. Operator theoretic approach to optimal control problems characterized by the Caputo fractional differential equations. Res. Control Optim. 2023, 10, 100194. [Google Scholar] [CrossRef]
- Giona, M.; Roman, H.E. Fractional diffusion equation for transport phenomena in random media. Physica A 1992, 185, 87–97. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F.; Moretti, D.; Pagnini, G.; Paradisi, P. Discrete random walk models for space–time fractional diffusion. Chem. Phys. 2002, 284, 521–541. [Google Scholar] [CrossRef]
- Huong, N.T.T.; Thang, N.N.; Ke, T.D. Commutator of the Caputo fractional derivative and the shift operator and applications. Commun. Nonlinear Sci. Numer. Simul. 2024, 131, 107857. [Google Scholar] [CrossRef]
- Fahad, H.M.; Fernandez, A. Operational calculus for Caputo fractional calculus with respect to functions and the associated fractional differential equations. Appl. Math. Comput. 2021, 409, 126400. [Google Scholar] [CrossRef]
- Green, C.; Liu, Y.; Yan, Y. Numerical methods for Caputo-Hadamard fractional differential equations with graded and non-uniform meshes. Mathematics 2021, 9, 2728. [Google Scholar] [CrossRef]
- Sivalingam, S.; Kumar, P.; Govindaraj, V. A neural networks-based numerical method for the generalized Caputo-type fractional differential equations. Math. Comput. Simul. 2023, 213, 302–323. [Google Scholar]
- Fan, E.; Li, C.; Li, Z. Numerical approaches to Caputo-Hadamard fractional derivatives with applications to long-term integration of fractional differential systems. Commun. Nonlinear Sci. Numer. Simul. 2022, 106, 106096. [Google Scholar] [CrossRef]
- Liu, C.-X.; Cao, J.-Y.; Lyu, T.; Ye, X.-Y. Numerical Analysis of a High-Order Scheme with Nonuniform Time Grids for Caputo-Hadamard Fractional Reaction Sub-diffusion Equations. Commun. Appl. Math. Comput. 2024, 1–28. [Google Scholar] [CrossRef]
- Hadamard, J. Essai sur l’étude des fonctions données par leur développement de taylor. J. Math. Pures Appl. 1892, 8, 101–186. [Google Scholar]
- Kilbas, A.A. Hadamard-type fractional calculus. J. Korean Math. Soc. 2001, 38, 1191–1204. [Google Scholar]
- Jarad, F.; Abdeljawad, T.; Baleanu, D. Caputo-type modification of the Hadamard fractional derivatives. Adv. Differ. Equ. 2012, 2012, 142. [Google Scholar] [CrossRef]
- Ma, L.; Li, C. On Hadamard fractional calculus. Fractals 2017, 25, 1750033. [Google Scholar] [CrossRef]
- Ma, L.; Li, C. On finite part integrals and Hadamard-type fractional derivatives. J. Comput. Nonlinear Dyn. 2018, 13, 090905. [Google Scholar] [CrossRef]
- Li, C.; Li, Z. Stability and logarithmic decay of the solution to Hadamard-type fractional differential equation. J. Nonlinear Sci. 2021, 31, 31. [Google Scholar] [CrossRef]
- Zheng, X. Logarithmic transformation between (variable-order) caputo and Caputo-Hadamard fractional problems and applications. Appl. Math. Lett. 2021, 121, 107366. [Google Scholar] [CrossRef]
- Zaky, M.A.; Hendy, A.S.; Suragan, D. Logarithmic jacobi collocation method for Caputo-Hadamard fractional differential equations. Appl. Numer. Math. 2022, 181, 326–346. [Google Scholar] [CrossRef]
- Zhao, T.; Li, C.; Li, D. Efficient spectral collocation method for fractional differential equation with Caputo-Hadamard derivative. Fract. Calc. Appl. Anal. 2023, 26, 2903–2927. [Google Scholar] [CrossRef]
- He, T.; Lu, J.; Li, M. The parareal algorithm for Caputo-Hadamard fractional differential equations. Commun. Anal. Comput. 2024, 2, 432–453. [Google Scholar] [CrossRef]
- Gohar, M.; Li, C.; Li, Z. Finite difference methods for Caputo–Hadamard fractional differential equations. Mediterr. J. Math. 2020, 17, 194. [Google Scholar] [CrossRef]
- Li, C.; Li, Z.; Wang, Z. Mathematical analysis and the local discontinuous galerkin method for Caputo-Hadamard fractional partial differential equation. J. Sci. Comput. 2020, 85, 41. [Google Scholar] [CrossRef]
- Wang, Z.; Ou, C.; Vong, S. A second-order scheme with nonuniform time grids for Caputo–Hadamard fractional sub-diffusion equations. J. Comput. Appl. Math. 2022, 414, 114448. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, L. A numerical approximation for the Caputo-Hadamard derivative and its application in time-fractional variable-coefficient diffusion equation. Discret. Contin. Dyn.-Syst.-S. 2024, 17, 2679–2705. [Google Scholar] [CrossRef]
- Ou, C.; Cen, D.; Wang, Z.; Vong, S. Fitted schemes for Caputo-Hadamard fractional differential equations. Numer. Algorithms 2024, 97, 135–164. [Google Scholar] [CrossRef]
- Liu, L.-B.; Xu, L.; Zhang, Y. Error analysis of a finite difference scheme on a modified graded mesh for a time-fractional diffusion equation. Math. Comput. Simul. 2023, 209, 87–101. [Google Scholar] [CrossRef]
- Stynes, M.; O’Riordan, E.; Gracia, J.L. Error analysis of a finite difference method on graded meshes for a time-fractional diffusion equation. SIAM J. Numer. Anal. 2017, 55, 1057–1079. [Google Scholar] [CrossRef]
- Gu, X.-M.; Wu, S.-L. A parallel-in-time iterative algorithm for Volterra partial integro-differential problems with weakly singular kernel. J. Comput. Phys. 2020, 417, 109576. [Google Scholar] [CrossRef]
- Zhao, Y.-L.; Gu, X.-M.; Ostermann, A. A preconditioning technique for an all-at-once system from Volterra subdiffusion equations with graded time steps. J. Sci. Comput. 2021, 88, 11. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | Parameter | ||||||
|---|---|---|---|---|---|---|---|
| MG-mesh | |||||||
| 1.5721 | 1.5793 | 1.5845 | 1.5884 | 1.5913 | |||
| G-mesh | |||||||
| 1.4801 | 1.5178 | 1.5419 | 1.5581 | 1.5695 | |||
| 1.4972 | 1.5286 | 1.5491 | 1.5632 | 1.5728 | |||
| 1.5161 | 1.5409 | 1.5574 | 1.5689 | 1.5770 |
| Grid | Parameter | ||||||
|---|---|---|---|---|---|---|---|
| MG-mesh | |||||||
| 1.4841 | 1.4889 | 1.4923 | 1.4946 | 1.4962 | |||
| G-mesh | |||||||
| 1.4176 | 1.4460 | 1.4639 | 1.4754 | 1.4831 | |||
| 1.4350 | 1.4569 | 1.4709 | 1.4800 | 1.4862 | |||
| 1.4350 | 1.4569 | 1.4709 | 1.4800 | 1.4862 |
| Grid | Parameter | ||||||
|---|---|---|---|---|---|---|---|
| MG-mesh | |||||||
| 1.3914 | 1.3944 | 1.3963 | 1.3976 | 1.3984 | |||
| G-mesh | |||||||
| 1.3443 | 1.3654 | 1.3782 | 1.3861 | 1.3910 | |||
| 1.3612 | 1.3756 | 1.3844 | 1.3900 | 1.3935 | |||
| 5.0684e-04 | |||||||
| 1.3497 | 1.3686 | 1.3802 | 1.3872 | 1.3918 |
| Grid | Parameter | ||||||
|---|---|---|---|---|---|---|---|
| MG-mesh | |||||||
| 1.2957 | 1.2974 | 1.2984 | 1.2990 | 1.2994 | |||
| G-mesh | |||||||
| 1.2630 | 1.2783 | 1.2872 | 1.2923 | 1.2954 | |||
| 1.2787 | 1.2873 | 1.2924 | 1.2954 | 1.2973 | |||
| 1.2609 | 1.2772 | 1.2865 | 1.2919 | 1.2951 |
| Grid | Parameter | ||||||
|---|---|---|---|---|---|---|---|
| MG-mesh | |||||||
| 1.1981 | 1.1989 | 1.1994 | 1.1997 | 1.1997 | |||
| G-mesh | |||||||
| 1.1759 | 1.1866 | 1.1926 | 1.1959 | 1.1977 | |||
| 1.1897 | 1.1943 | 1.1968 | 1.1982 | 1.1990 | |||
| 1.1695 | 1.1832 | 1.1907 | 1.1948 | 1.1970 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Liu, L.; Chen, H.; Mai, X. Error Analysis of the L1 Scheme on a Modified Graded Mesh for a Caputo–Hadamard Fractional Diffusion Equation. Fractal Fract. 2025, 9, 286. https://doi.org/10.3390/fractalfract9050286
Liu D, Liu L, Chen H, Mai X. Error Analysis of the L1 Scheme on a Modified Graded Mesh for a Caputo–Hadamard Fractional Diffusion Equation. Fractal and Fractional. 2025; 9(5):286. https://doi.org/10.3390/fractalfract9050286
Chicago/Turabian StyleLiu, Dan, Libin Liu, Hongbin Chen, and Xiongfa Mai. 2025. "Error Analysis of the L1 Scheme on a Modified Graded Mesh for a Caputo–Hadamard Fractional Diffusion Equation" Fractal and Fractional 9, no. 5: 286. https://doi.org/10.3390/fractalfract9050286
APA StyleLiu, D., Liu, L., Chen, H., & Mai, X. (2025). Error Analysis of the L1 Scheme on a Modified Graded Mesh for a Caputo–Hadamard Fractional Diffusion Equation. Fractal and Fractional, 9(5), 286. https://doi.org/10.3390/fractalfract9050286