

A Suitable Algorithm to Solve a Nonlinear Fractional Integro-Differential Equation with Extended Singular Kernel in (2+1) Dimensions


Abstract
1. Introduction
2. Fractional Calculus
3. Problem Formulation and Basic Equations
4. Special Cases from the Mixed Nonlinear Integral Equation and Its Extended Kernel
- (I)
- Many special and new cases can be derived from NMI-FrDE
- If in Equation (4), we consider , after using the second order of Taylor expansion, we have the following equation
- If in Equation (6) we have the MI-FrDE in the form
- If in Equation (6), and we have an NFIE of the second kindwhere in the last two cases is as in relation (7).
- If in Equation (6), we have the following first kind mixed integral equation
- (II)
- Special cases from the kernel:
5. Existence of a Unique Solution of the Integro-Fractional Differential Equation
- (i)
- The kernel of position satisfies the discontinuity conditions in the space
- (ii)
- The kernel , satisfies for a continuous function , the following integrals are continuous functions of
- (iii)
- The norm of the function in Equation (7) is defined aswhere and are constants.
- (iv)
- The known function , for the constant , satisfieswhere are continuous functions in the domain of integration.
- (v)
- The norm of any function in space is defined as
6. Stability of a General Solution
7. The Error Stability
8. Technique of Separation of Variables
9. The Toeplitz Matrix Method
10. Numerical Results
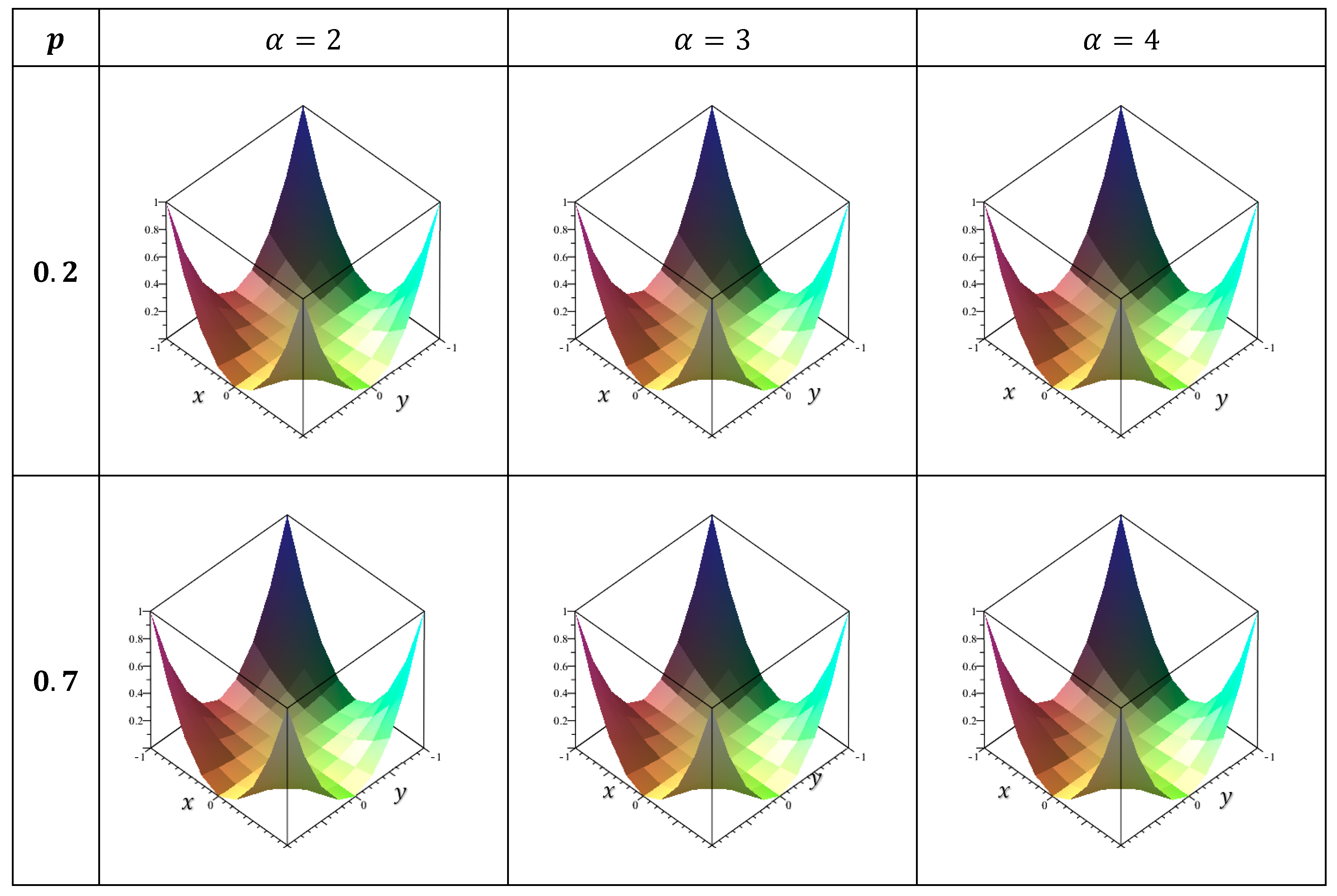
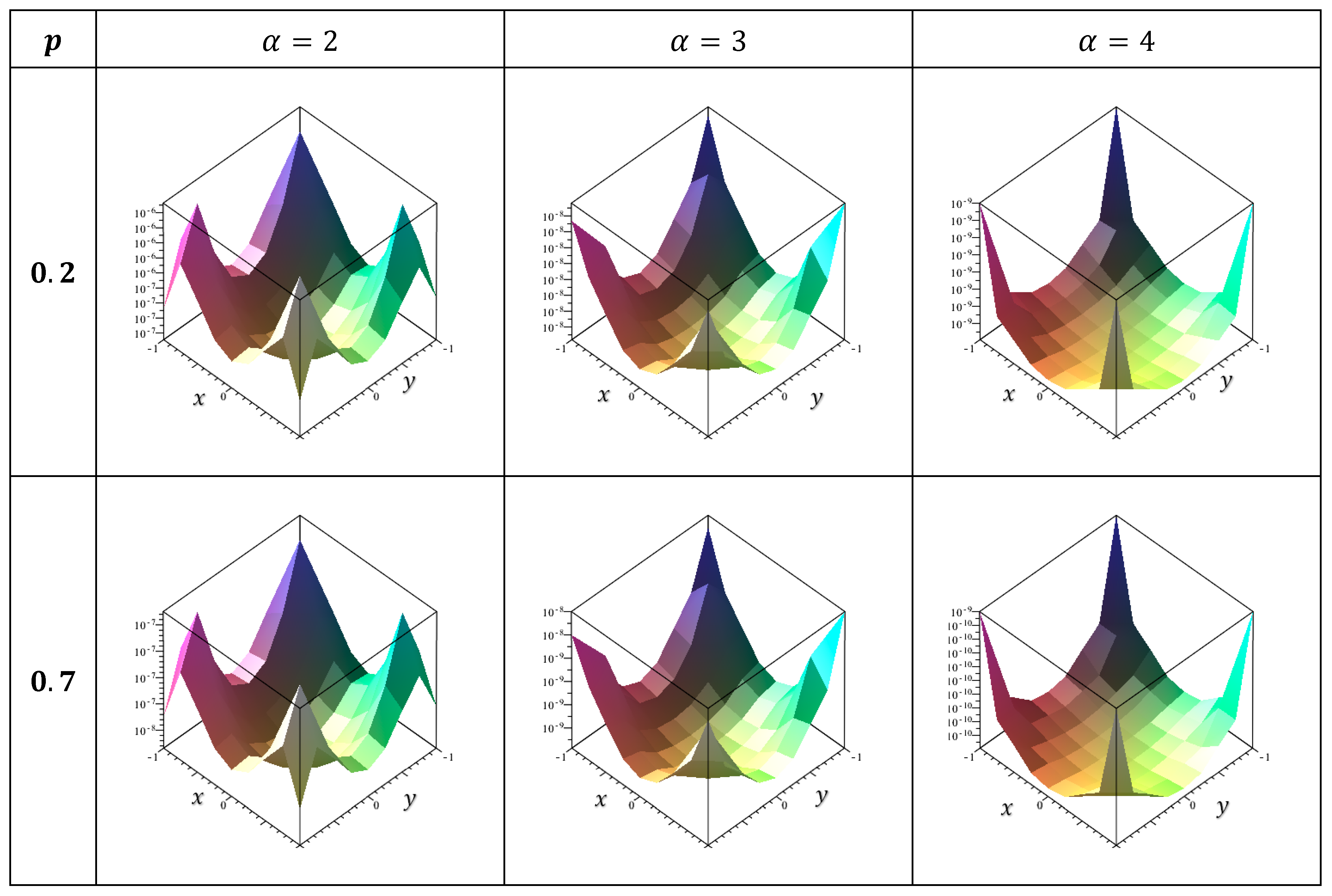
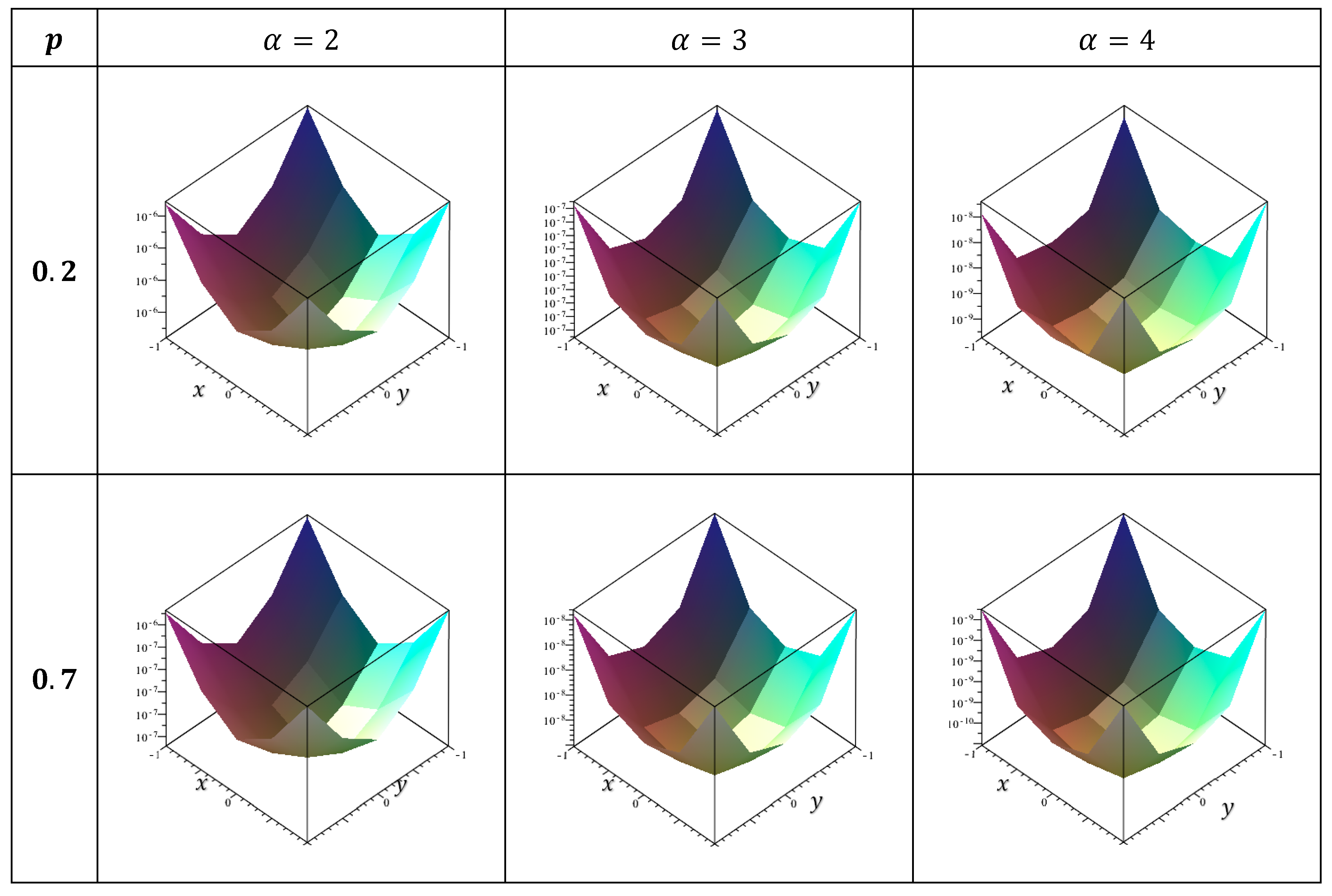
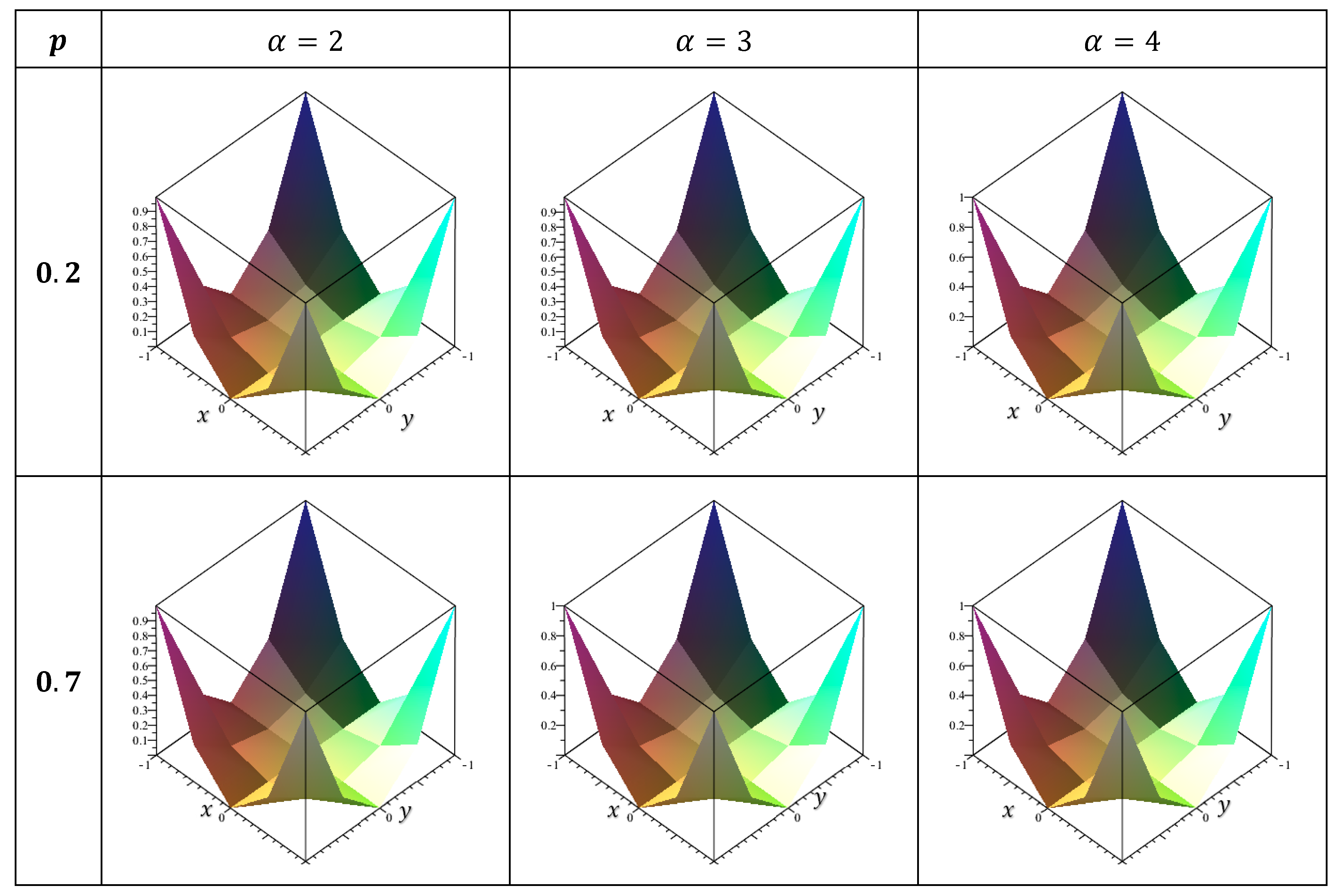
11. Discussion
- 1.
- The numerical solutions were consistently extremely near to the exact solution.
- 2.
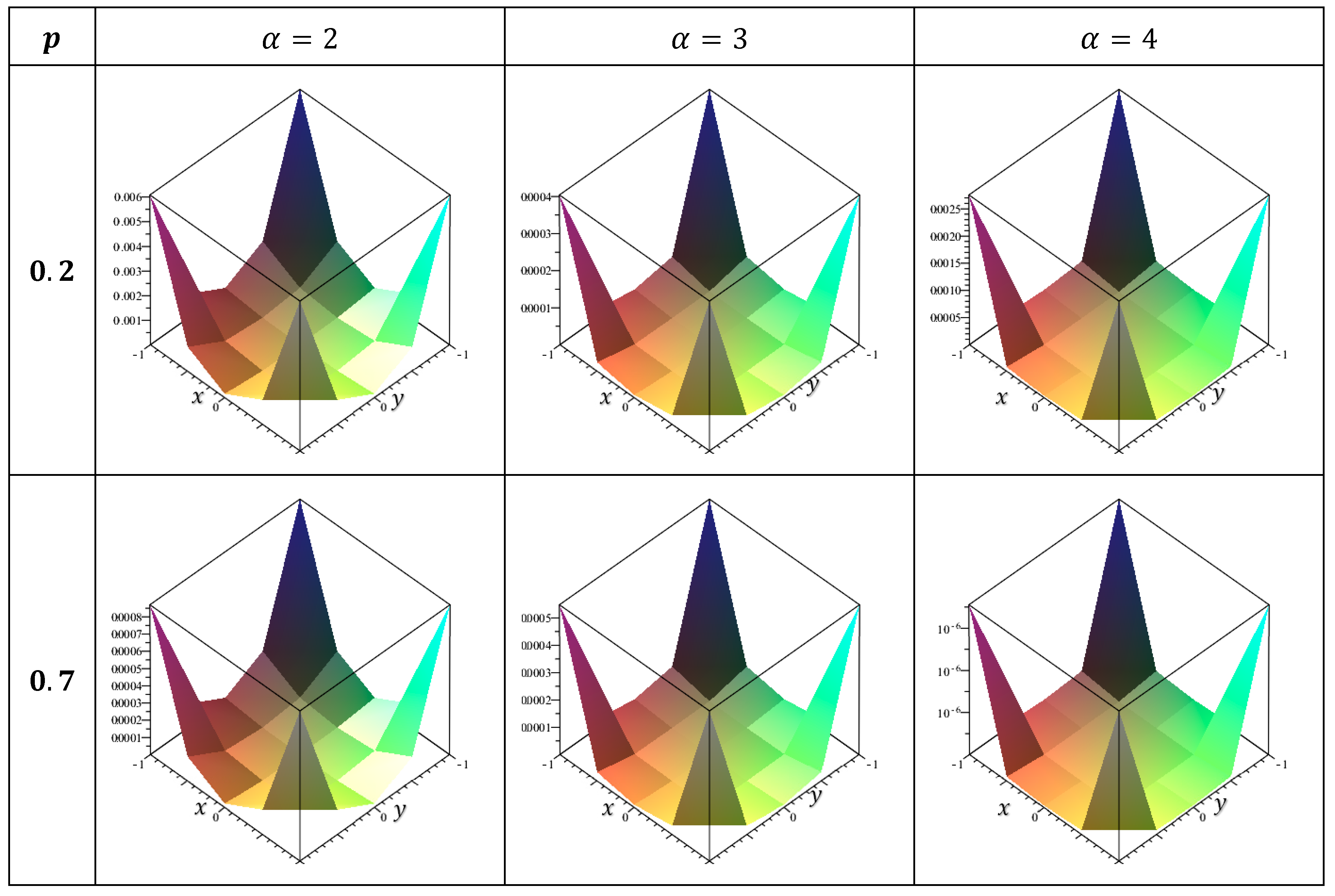
- In each case studied, the error value increases as it approaches the endpoints . Additionally, it decreases as it approaches zero at the center of the position plane.
- 3.
- The smaller the error is, the greater is the value of α.
- 4.
- 5.
- The error decreases as the p-value increases, indicating that the accuracy in nonlinear cases is greater than the accuracy in linear cases.
- 6.
- TMM is regarded as one of the greatest techniques for solving singular integral equations, where the solution can be obtained directly, and the singularity vanishes.
- 7.
- The logarithmic results in Table 1 are the most accurate.
- 8.
- The Cauchy results in Table 4 have the greatest error.
- 9.
- The techniques used in this study preserve the symmetry characteristic of the numerical results related to the plane of position.
- 10.
12. Conclusions
- 1.
- The fractional integro-differential equation is equivalent to the phase-lag integral equation.
- 2.
- Discussing the existence and uniqueness of the solution as well as the convergence and stability of the error is very important in discussing mathematical problems in general.
- 3.
- In this work, special cases were derived from the general situation of the fractional integro-differential equation, and the linear relationship of the equation was also deduced from the general equation. In addition, many and various specific types were obtained from the general kernel.
- 4.
- The investigation of the existence of a solution to the problem is classified according to the general situation of the equation to be solved and then the basic conditions for this solution: (a) Banach’s fixed point theorem must be used if the integral equation that is to be solved is of the first kind. In this case, the so-called Picard method (the method of successive approximation) fails. A theorems successive approximation approach or fixed-point theorems may be used if the equation is of the second kind. Fixed point theorems are governed by the initial conditions set to solve the problem.
- 5.
- The Toeplitz matrix method is distinguished from all previous methods by the following properties: (a) The ability to formulate the kernel in general and to consider that the singular kernels such as the logarithmic kernel, the Caleman kernel, the Cauchy kernel, the Hilbert kernel, and finally the strongly singular kernel are special cases of the imposed kernel. (b) This method transforms the singular integrals into ordinary integrals that are easy to solve.
13. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NFIE | nonlinear Fredholm integral equation |
| V-FIE | Volterra–Fredholm integral equation |
| NMIE | nonlinear mixed integral equation |
| FrI-DEs | fractional integro-differential equations |
| NMI-FrDE | nonlinear mixed integro-fractional differential equation |
| SNFIEs | system of nonlinear Fredholm integral equations |
| TMM | Toeplitz matrix method |
| NAS | nonlinear algebraic system |
References
- Tarasov, V.E. Fractional integro-differential equations for electromagnetic waves in dielectric media. Theor. Math. Phys. 2009, 158, 355–359. [Google Scholar] [CrossRef]
- Munusamy, K.; Ravichandran, C.; Nisar, K.S.; Ghanbari, B. Existence of solutions for some functional integrodifferential equations with nonlocal conditions. Math. Methods Appl. Sci. 2020, 43, 10319–10331. [Google Scholar] [CrossRef]
- Verma, P.; Kumar, M. An analytical solution with existence and uniqueness conditions for fractional integro-differential equations. Int. J. Model. Simul. Sci. Comput. 2020, 11, 2050045. [Google Scholar] [CrossRef]
- Raad, S.; Alqurashi, K. Toeplitz matrix and Nyström method for solving linear fractional integro-differential equation. Eur. J. Pure Appl. Math. 2022, 15, 796–809. [Google Scholar] [CrossRef]
- Alhazmi, S.E. New model for solving mixed integral equation of the first kind with generalized potential kernel. J. Math. Res. 2017, 9, 18–29. [Google Scholar] [CrossRef]
- Nemati, S.; Lima, P.M.; Ordokhani, Y. Numerical solution of a class of two dimensional nonlinear Volterra integral equations using Legendre polynomials. J. Comput. Appl. Math. 2013, 242, 53–69. [Google Scholar] [CrossRef]
- Hafez, R.M.; Youssri, Y.H. Spectral Legendre-Chebyshev treatment of 2D linear and nonlinear mixed Volterra-Fredholm integral equation. Math. Sci. Lett. 2020, 9, 37–47. [Google Scholar]
- El-Sayed, A.M.A.; Ahmed, R.G. Solvability of a coupled system of functional integro-differential equations with infinite point and Riemann–Stieltjes integral conditions. Appl. Math. Comput. 2020, 370, 124918. [Google Scholar] [CrossRef]
- Huang, L.; Li, X.F.; Zhao, Y.; Duan, X.Y. Approximate solution of fractional integro-differential equations by Taylor expansion method. Comput. Math. Appl. 2011, 62, 1127–1134. [Google Scholar] [CrossRef]
- Mojahedfar, M.; Tari Marzabad, A. Solving two-dimensional fractional integrod ifferential equations by Legendre wavelets. Bull. Iran. Math. Soc. 2017, 43, 2419–2435. [Google Scholar]
- Li, C.; Plowman, H. Solutions of the generalized Abel’s integral equations of the second kind with variable coefficients. Axioms 2019, 8, 137. [Google Scholar] [CrossRef]
- Matoog, R.T. Modified Taylor’s method and nonlinear mixed integral equation. Univ. J. Integ. Eq. 2016, 4, 21–29. [Google Scholar]
- Abusalim, S.M.; Abdou, M.A.; Abdel-Aty, M.A.; Nili, M.E. Hybrid Functions Approach via Nonlinear Integral Equations with Symmetric and Nonsymmetrical Kernel in Two Dimensions. Symmetry 2023, 15, 1408. [Google Scholar] [CrossRef]
- Mahdy, A.M.S.; Abdou, M.A.; Mohamed, D.S. A computational technique for computing second-type mixed integral equations with singular kernels. J. Math. Comput. Sci. 2024, 32, 137–151. [Google Scholar] [CrossRef]
- Jan, A.R.; Abdou, M.A.; Basseem, M. A Physical Phenomenon for the Frac tional Nonlinear Mixed Integro-Differential Equation Using a Quadrature Nystrom Method. Fractal Fract. 2023, 7, 656. [Google Scholar] [CrossRef]
- Akram, T.; Ali, Z.; Rabiei, F.; Shah, K.; Kumam, P.A. Numerical Study of Nonlinear Fractional Order Partial Integro-Differential Equation with a Weakly Singular Kernel. Fractal Fract. 2021, 5, 85. [Google Scholar] [CrossRef]
- Abdelkawy, M.A.; Amin, A.Z.; Lopes, A.M.; Hashim, I.; Babatin, M.M. Shifted fractional-order Jacobi collocation method for solving variable-order fractional integro differential equation with weakly singular kernel. Fractal Fract. 2022, 6, 19. [Google Scholar] [CrossRef]
- Tariboon, J.; Ntouyas, S.K.; Sudsutad, W. Some new Riemann-Liouville fractional integral inequalities. Int. J. Math. Math. Sci. 2014, 2014, 6. [Google Scholar] [CrossRef]
- Podlubny, I.; Chechkin, A.; Skovranek, T.; Chen, Y.; Jara, B.M.V. Matrix approach to discrete fractional calculus II: Partial fractional differential equations. J. Comput. Phys. 2009, 228, 3137–3153. [Google Scholar] [CrossRef]
- Columbu, A.; Fuentes, R.D.; Frassu, S. Uniform-in-time boundedness in a class of local and nonlocal nonlinear attraction-repulsion chemotaxis models with logistics. arXiv 2023, arXiv:2311.06526. [Google Scholar] [CrossRef]
- Raad, S.A.; Abdou, M.A. The Effect of Fractional Order of Time Phase Delay via a Mixed Integral Equation in (2+1) Dimensions with an Extended Discontinuous Kernel. Symmetry 2025, 17, 36. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series and Product; Academic Press: New York, NY, USA, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num. Solution | Error | Num. Solution | Error | Num. Solution | Error | ||
|---|---|---|---|---|---|---|---|
| 5.220 × 10−7 | 7.700 × 10−8 | 8.10 × 10−9 | |||||
| 9.394 × 10−7 | 0.2499999672 | 3.270 × 10−8 | 1.40 × 10−9 | ||||
| × 10−7 | 1.1080 × 10−7 | 1.9989 × 10−9 | 1.9989 × 10−9 | 5.1466 × 10−11 | 5.1466 × 10−11 | ||
| × 10−7 | × 10−7 | × 10−8 | × 10−8 | 5.0681 × 10−10 | 5.0681 × 10−10 | ||
| × 10−7 | × 10−7 | × 10−9 | × 10−9 | 1.4415 × 10−10 | 1.4415 × 10−10 | ||
| 6.0847 × 10−7 | 1.328 × 10−8 | 0.0624999996 | 4.00 × 10−10 | ||||
| 7.600 × 10−8 | 1.100 × 10−8 | 1.00 × 10−9 | |||||
| 1.348 × 10−7 | 0.249999996 | 4.400 × 10−9 | 2.00 × 10−10 | ||||
| 1.5829 × 10−8 | 1.5829 × 10−8 | 2.7112 × 10−10 | 2.7112 × 10−10 | 6.6448 × 10−12 | 6.6448 × 10−12 | ||
| 6.6495 × 10−8 | 6.6495 × 10−8 | × 10−9 | × 10−9 | 6.5434 × 10−11 | 6.5434 × 10−11 | ||
| × 10−8 | × 10−8 | × 10−10 | × 10−10 | 1.8611 × 10−11 | 1.8611 × 10−11 | ||
| 8.693 × 10−8 | 1.8100 × 10−9 | 0.0624999999 | 6.00 × 10−11 | ||||
| Num. Sol. | Error | Num. Sol. | Error | Num. Sol. | Error | ||
|---|---|---|---|---|---|---|---|
| 7.3700 × 10−6 | 3.0450 × 10−7 | 1.4200 × 10−8 | |||||
| 5.6863 × 10−6 | 0.2499997921 | 2.0540 × 10−7 | 0.249999991 | 8.9000 × 10−9 | |||
| 3.2027 × 10−6 | 3.20267 × 10−6 | 1.0853 × 10−7 | 1.0853 × 10−7 | 4.5129 × 10−9 | 4.5129 × 10−9 | ||
| × 10−6 | × 10−6 | × 10−7 | × 10−7 | × 10−9 | × 10−9 | ||
| × 10−6 | × 10−6 | × 10−7 | × 10−7 | × 10−9 | × 10−9 | ||
| 4.3524 × 10−6 | × 10−7 | 5.5200 × 10−9 | |||||
| 1.0528 × 10−6 | 4.1800 × 10−8 | 1.900 × 10−9 | |||||
| 8.1250 × 10−7 | 0.2499999718 | 2.8200 × 10−8 | 1.200 × 10−9 | ||||
| 4.5753 × 10−7 | 4.5753 × 10−7 | 1.4720 × 10−8 | 1.4720 × 10−8 | 5.8266 × 10−10 | 5.8266 × 10−10 | ||
| 7.0160 × 10−7 | 7.0160 × 10−7 | × 10−8 | × 10−8 | 1.0710 × 10−9 | 1.0710 × 10−9 | ||
| × 10−7 | × 10−7 | × 10−8 | × 10−8 | 6.4418 × 10−10 | 6.4418 × 10−10 | ||
| 6.2179 × 10−7 | 1.8670 × 10−8 | 0.06249999927 | 7.300 × 10−10 | ||||
| Num. Sol. | Error | Num. Sol. | Error | Num. Sol. | Error | ||
|---|---|---|---|---|---|---|---|
| 3.07323 × 10−5 | 1.5418 × 10−6 | 8.5700 × 10−8 | |||||
| 1.5322 × 10−5 | 0.249999443 | 5.5730 × 10−7 | 0.249999975 | 2.5200 × 10−8 | |||
| 3.5770 × 10−6 | 3.5770 × 10−6 | 1.1717 × 10−7 | 1.1717 × 10−7 | 4.7856 × 10−9 | 4.7856 × 10−9 | ||
| × 10−5 | × 10−5 | × 10−7 | × 10−7 | × 10−8 | × 10−8 | ||
| × 10−6 | × 10−6 | × 10−7 | × 10−7 | × 10−9 | × 10−9 | ||
| 7.6433 × 10−6 | × 10−7 | 7.3800 × 10−9 | |||||
| 4.3902 × 10−6 | 2.0920 × 10−7 | 1.1500 × 10−8 | |||||
| 2.1889 × 10−6 | 0.249999924 | 7.5700 × 10−8 | 3.300 × 10−9 | ||||
| 5.1099 × 10−7 | 5.1099 × 10−7 | 1.5892 × 10−8 | 1.5892 × 10−8 | 6.1786 × 10−10 | 6.1786 × 10−10 | ||
| 1.4980 × 10−6 | 1.4980 × 10−6 | × 10−8 | × 10−8 | 2.6172 × 10−9 | 2.6172 × 10−9 | ||
| × 10−7 | × 10−7 | × 10−8 | × 10−8 | 7.6730 × 10−10 | 7.6730 × 10−10 | ||
| 1.0919 × 10−6 | 2.7370 × 10−8 | 0.062499999 | 9.600 × 10−10 | ||||
| Num. Sol. | Error | Num. Sol. | Error | Num. Sol. | Error | ||
|---|---|---|---|---|---|---|---|
| 6.0862 × 10−3 | 4.0401 × 10−4 | 2.7546 × 10−5 | |||||
| 9.9394 × 10−4 | 0.249976059 | 2.3941 × 10−5 | 0.249999207 | 7.9260 × 10−7 | |||
| 4.3281 × 10−6 | 4.3281 × 10−6 | 1.3332 × 10−7 | 1.3332 × 10−7 | 5.2761 × 10−9 | 5.2761 × 10−9 | ||
| × 10−4 | × 10−4 | × 10−6 | × 10−6 | × 10−7 | × 10−7 | ||
| × 10−5 | × 10−5 | × 10−7 | × 10−7 | × 10−8 | × 10−8 | ||
| 16232 × 10−4 | × 10−6 | 2.2800 × 10−8 | |||||
| 8.6947 × 10−4 | 5.4796 × 10−5 | 3.5561 × 10−6 | |||||
| 1.4199 × 10−4 | 0.249996753 | 3.2472 × 10−6 | 1.0240 × 10−7 | ||||
| 6.1831 × 10−7 | 6.1831 × 10−7 | 1.8082 × 10−8 | 1.8082 × 10−8 | 6.8119 × 10−10 | 6.8119 × 10−10 | ||
| 2.3186 × 10−5 | 2.3186 × 10−5 | × 10−7 | × 10−7 | 4.9220 × 10−8 | 4.9220 × 10−8 | ||
| × 10−6 | × 10−6 | × 10−8 | × 10−8 | 1.4162 × 10−9 | 1.4162 × 10−9 | ||
| 2.3188 × 10−5 | 1.9243 × 10−7 | 0.062499997 | 2.9500 × 10−9 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raad, S.A.; Abdou, M.A. A Suitable Algorithm to Solve a Nonlinear Fractional Integro-Differential Equation with Extended Singular Kernel in (2+1) Dimensions. Fractal Fract. 2025, 9, 239. https://doi.org/10.3390/fractalfract9040239
Raad SA, Abdou MA. A Suitable Algorithm to Solve a Nonlinear Fractional Integro-Differential Equation with Extended Singular Kernel in (2+1) Dimensions. Fractal and Fractional. 2025; 9(4):239. https://doi.org/10.3390/fractalfract9040239
Chicago/Turabian StyleRaad, Sameeha Ali, and Mohamed Abdella Abdou. 2025. "A Suitable Algorithm to Solve a Nonlinear Fractional Integro-Differential Equation with Extended Singular Kernel in (2+1) Dimensions" Fractal and Fractional 9, no. 4: 239. https://doi.org/10.3390/fractalfract9040239
APA StyleRaad, S. A., & Abdou, M. A. (2025). A Suitable Algorithm to Solve a Nonlinear Fractional Integro-Differential Equation with Extended Singular Kernel in (2+1) Dimensions. Fractal and Fractional, 9(4), 239. https://doi.org/10.3390/fractalfract9040239