1. Introduction
There are different fields in which great importance has been achieved through cooperative control due to vast applications, e.g., many car collaborative commands [
1], spacecraft group traveling [
2], and unmanned aerial vehicles [
3]. Great focus has been obtained by multi-agent system consensus. Remarkable investigation has been conducted on the consensus of leader-following systems [
4,
5] and consensus of non-leader-following systems [
6,
7]. Integer-order dynamical standards are very important according to some researchers [
8,
9,
10]. This means that fractional derivatives play an important role in the description of many phenomena that are very complicated and processes that are compared with integer-order classical derivatives [
11]. Graph theory and the Lyapunov function approach were used by Yu et al. [
12] to assume a group of fractional-order leaders following consensus. On multi-agent system consensus, an investigation was conducted by Bai et al. through designing a useful controller [
13,
14]. Xu et al. applied the suggested lemma and an appropriate Lyapunov function to analyze the fractional-order challenging system replica [
15,
16,
17]. In the case of a real dynamical system, we can say that a delay in time can be considered a common phenomenon that can affect the dynamical standard’s behavioral system and even make the system risky [
18,
19].
Research on the consensus of the fractional-order delayed system can now be performed using the frequency-domain analysis method. For instance, in [
20], fractional-order system consensus with input delay was considered. Directed multi-agent systems with delay in non-uniform input and communication were studied in [
21,
22] to explore the well-posedness and iterative formula for fractional oscillator equations characterized by dual fractional orders and temporal delays. Concerning heterogeneous input, an undirected multi-agent system with delay was considered in [
23,
24] in order to find adherence and complicated dynamical system consensus in time domain analysis. The most suitable approach was presented by Liu et al. for dealing with adherence to differential equations of fractional order [
25,
26]. Certain stability criteria are obtained using the proposed lemma in many systems of fractional order [
27].
Current research has primarily concentrated on the nonlinear dynamics of fractional-order multi-agent systems, often overlooking the impact of delay effects. For instance, Refs. [
28,
29] illustrated the effectiveness of nonlinear control methods in enhancing the robustness and stability of fractional-order multi-agent systems. Similarly, Refs. [
30,
31] developed advanced nonlinear synchronization techniques that highlighted the superior performances of fractional-order systems compared to traditional models. The literature still has a notable gap concerning the integration of delayed nonlinear functions into the dynamics of fractional-order multi-agent systems. Despite the crucial role that delays play in real-world systems’ sensing, actuation, and communication processes, there has not been sufficient focus on incorporating them into fractional-order models. This is a critical lag because delays can significantly impact the synchronization, stability, and overall performance of multi-agent systems.
In this article, we present an resilient-based consensus analysis of a fractional order nonlinear multi-agent system with distributed and input lags. We use the nonlinear delayed function in the dynamics of the system. Using algebraic graph theory and the fractional Razumikhin approach, certain algebraic manipulations on leader-following consensus are presented. Finally, we express some examples to show that the cases described are suitable for checking consensus. The layout of our paper is described in
Figure 1.
2. Preliminaries
First of all, we offer some definitions, including several crucial lemmas. We will use them subsequently. Let directed weighted graph
consist of a collection of faces
and
be the directed edge’s set, where every directed edge
is a vertex ordered pair
that illustrates an edge that starts at vertex
and terminates at vertex
, where
is called the tail and
is the head.
displays the neighbor’s collection of corners. Let
be a weighted adjacency matrix, where
for
; else,
. If
B defines a directed graph, then its directed spanning tree is a subgraph of
B such that the root vertices can reach every other vertex by following the directed edge. Let
be the Laplacian matrix of the graph
B:
Obviously, we can say that .
Lemma 1. If and only if one eigenvalue of the Laplacian matrix E is 0 and the other eigenvalue real components are positive, the directed graph B has a directed spanning tree.
Definition 1 ([
8])
. Let be a function. Then, we can define Caputo’s derivative with order γ as where . Definition 2 ([
8])
. The function is if and exist, which satisfy where δ is a diagonal matrix, and u is any constant. Lemma 2 ([
8])
. Let F, G, H be three matrices. Then, the inequality and inequalities are equivalent. Lemma 3 ([
8])
. Take as a continuous and also differentiable function, . Then, the following inequality holds:Let be expressed as the Banach space, which is paired via the supreme norm. With the delay in time, consider a general fractional nonlinear equation: If , and , then to the , and this satisfies .
Lemma 4 ([
8])
. Let be continuous increasing functions; and are non-negative if v is greater than zero, and , if differential function and continuous increasing function are greater when compared to v for , such that for and , ifThe solution of Equation (6) is asymptotically stable if for , and if v→∞, then is called globally stable. Lemma 5 ([
23])
. Let be the eigenvalues of matrix and be the eigenvalues of matrix . Then, the eigenvalues of are . 3. Problem Formulation
The fractional-order nonlinear multi-agent system’s resilient-based consensus analysis with distributed and input delay is explained in this section. Many convenient conditions will be shown using the fractional-order Razumikhin approach.
Let the state of yth agent be
where
Here,
represent the states of agents. Here,
is the input delay,
is the distributed delay,
and
are given nonlinear functions, and
G and
H are constant matrices.
is a controller, and
is disturbance in the controller, and
, which is taken to be bounded in this case. The leader satisfies
Let the controller be designed as follows:
Here, L is taken to be a constant matrix, and it is assumed that its eigenvalues are non-negative. If there is a directed connection from to where and , then , and otherwise.
Definition 3 ([
23])
. The system that is defined by (9) and (10) under controlling rule (11) gains leader-following consensus if any , whereTo obtain results, some lemmas and assumptions are needed.
Assumption 1. In incorporating delays into the utility evaluation process, the QUAD function plays a crucial role in enhancing decision-making processes within multi-agent systems. This, in turn, bolsters the resilience and efficiency of agent interactions, so we assume that l is .
Assumption 2. For efficient communication between agents, assume that the corresponding digraph of a multi-agent system with a rooted leader contains a spanning tree.
Assumption 3. As we require stability in a multi-agent systems (9) and (10), assume that is Lipschitz continuous; that is, there exist two scalars such that for any ξ, , Lemma 6 ([
8])
. Consider , . Assumption 2 is satisfied if and only if the real part of all eigenvalues of matrix M are non-negative. Lemma 7 ([
8])
. If Assumption 2 is satisfied according to Lemma 5, then the real portion of the eigenvalues of matrix are positive. Lemma 8 ([
8])
. Let u, and . Then, inequality holds. Remark 1. Our proposed fractional-order leader-following consensus algorithm offers significant improvements over existing methods. Unlike [21], which involves multiple leaders, coordination is more straightforward with a single leader, simplifying the control strategy and communication protocols, thereby enhancing efficiency. Compared to the method of [22], which uses nonlinear functions to handle system dynamics, our method uses nonlinear delayed functions, further stabilizing the system by damping oscillations and allowing agents to synchronize actions over time, leading to more robust and realistic modeling. Moreover, in contrast to the approach of [26], which defines system dynamics using ordinary differential equations, our approach employs fractional differential equations. This captures memory and hereditary properties, enabling a more accurate modeling of complex interactions, improving convergence speed, stability, and overall robustness. These enhancements demonstrate the superior effectiveness of our proposed technique. 4. Leader-Following Consensus
The fractional-order nonlinear multi-agent system’s resilient-based consensus analysis with distributed and input delay is explained in this section. Many convenient conditions will be shown using the fractional-order Razumikhin approach.
Theorem 1. If Assumptions 1 and 2 are satisfied and scalars and and a positive definite matrix exist, then the system that is defined by (9) and (10) under control law (11) achieves leader-following consensus ifwhere and , which are scalars, and both u and δ are defined in Definition 2. Also, . Proof. Through using Equation (
11) in Equation (
9),
In subtracting Equation (
10) from Equation (
16),
Here,
represents the error term in the system defined by Equations (
9) and (
10). Then, Equation (
17) takes the form
Let a quadratic Lyapunov function be chosen as follows:
By using Lemma 3 and along with the solutions of Equation (
18), we find the
-order derivative of
:
In substituting Equation (
19) into Equation (
21),
From Assumption 1, we have
Now, in substituting values into Equation (
22),
Whenever
in this case,
, for any scalar
, and for some positive
,
In using Assumption 3,
where
,
,
, and
.
In using inequalities (
14) and (
15) and Lemma 2,
and
Systems (
14) and (
15) are satisfied in based on Lemma 2; this provides evidence that if
, then
for some
and
. Hence, according to Lemma 4, it can be said that system (
19) is asymptotically stable. The system that is defined by (
9) and (
10) under control law (
11) achieves leader-following consensus. □
Remark 2. The criteria for the consensus of the fractional-order multi-agent system used above describe the achievement of the leader-following consensus with delays and disturbance in the controller. But when there is a larger delay and disturbance occurs, then there is more chance to increase in error, which can reduce the accuracy of the system.
Corollary 1. If Assumptions 1 and 2 hold and a , , , and exist, where , , and ϱ are scalars and R is a positive definite matrix, then the system that is defined by (9) and (10) under control law (11) achieves leader-following consensus ifand Lemma 9. Our criteria will be much better for determining the consensus of the leader-follower system. The system that is analyzed in this article results from a weighted directed graph as well as from having a distributed input delay. Our standards apply to broader leader-follower systems, as the criteria employed apply only to directed graphs. If “” is used in place of in the first equation of Formula (24), then the following result can be obtained. Lemma 10. If Assumptions 1 and 2 hold and a , , and exist, where and ϱ are scalars and R is a positive definite matrix, then the system that is defined by (9) and (10) under control law (11) achieves leader-following consensus if The results that are being obtain must be suitable for the leader-follower systems of the fractional order, which have undirected topology.
Lemma 11. The graph B is connected if and only if Laplacian matrix E is a graph that is undirected. B is a positive semi-definite matrix. Moreover, it can be said that E has a simple eigenvalue of zero and that the other eigenvalues are non-negative.
Lemma 12. Based on Theorem 1, the system generates a directed graph or weighted graph. Only Lemma 1 needs to be modified, and the proof is completed in a similar manner as if the system’s topology is a connected undirected graph.
Remark 3. Our work has limitations due to our reliance on particular model assumptions, which cannot be applied to other multi-agent systems or variations in delays and disturbances. We did not examine different network topologies or broader disturbance types, or analyze computational complexity and parameter sensitivity. Furthermore, practical validation through experiments or simulations is necessary to verify our theoretical results. Future research should focus on addressing these issues to improve the robustness and applicability of our control strategy.
5. Examples
To determine the effectiveness of the results, consider some numerical examples.
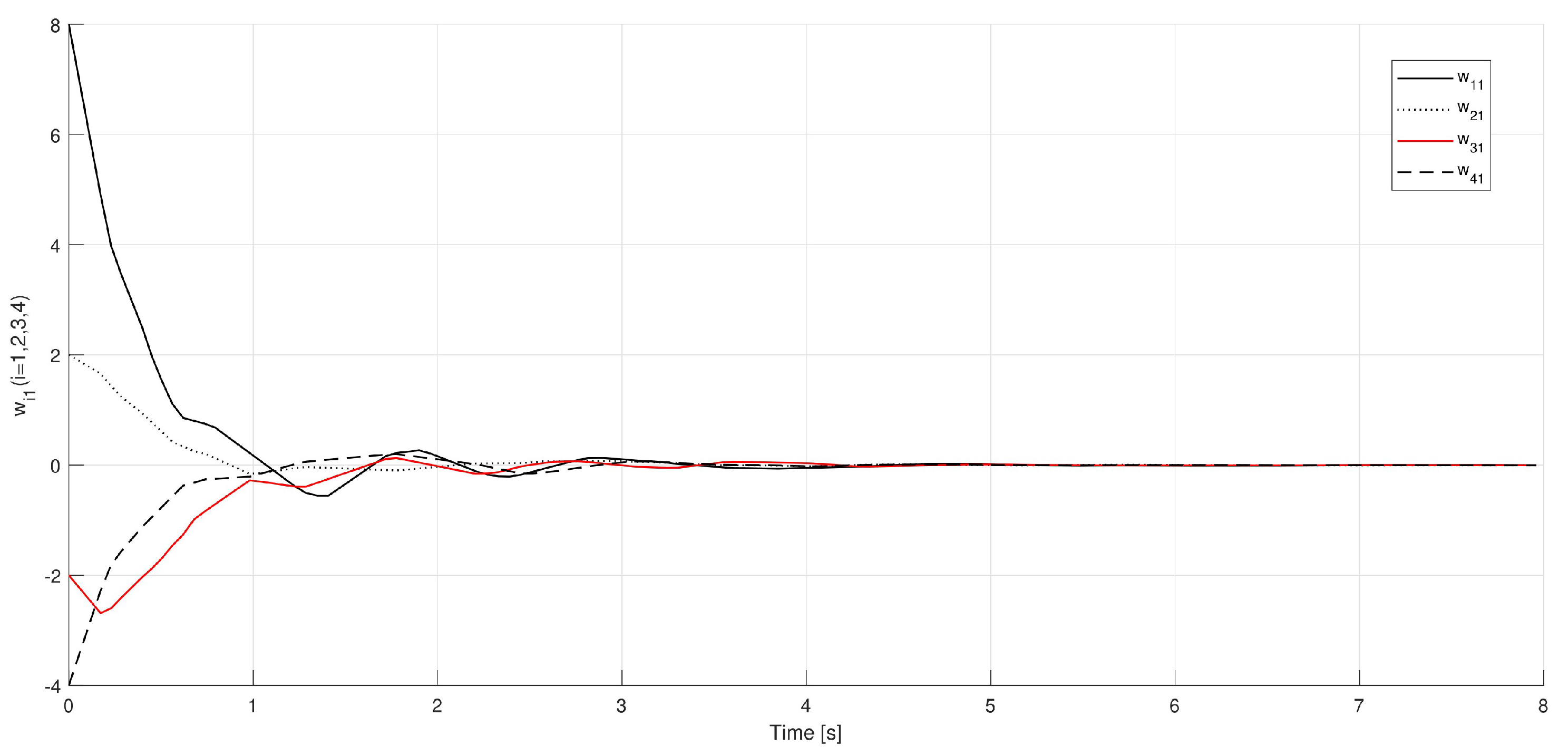
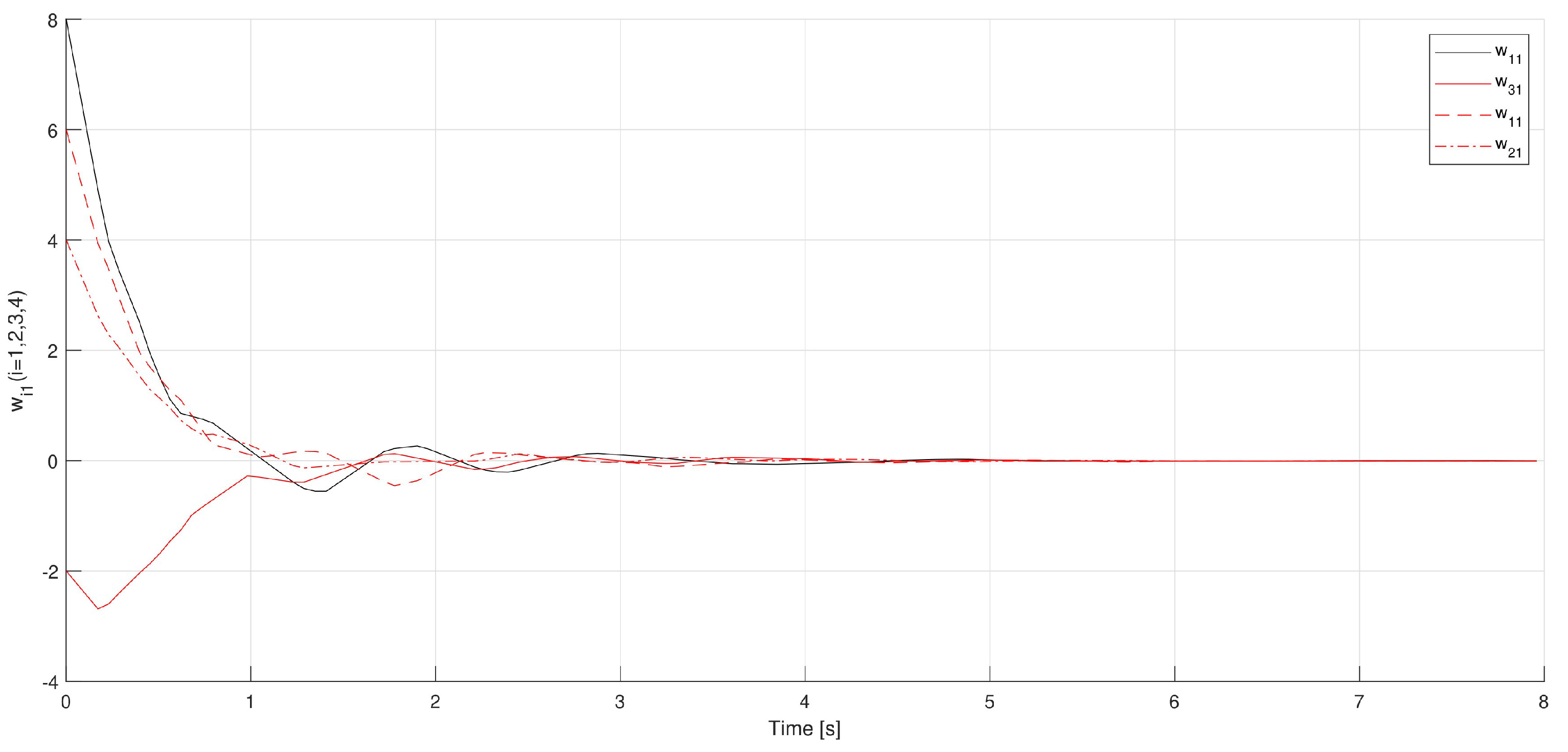
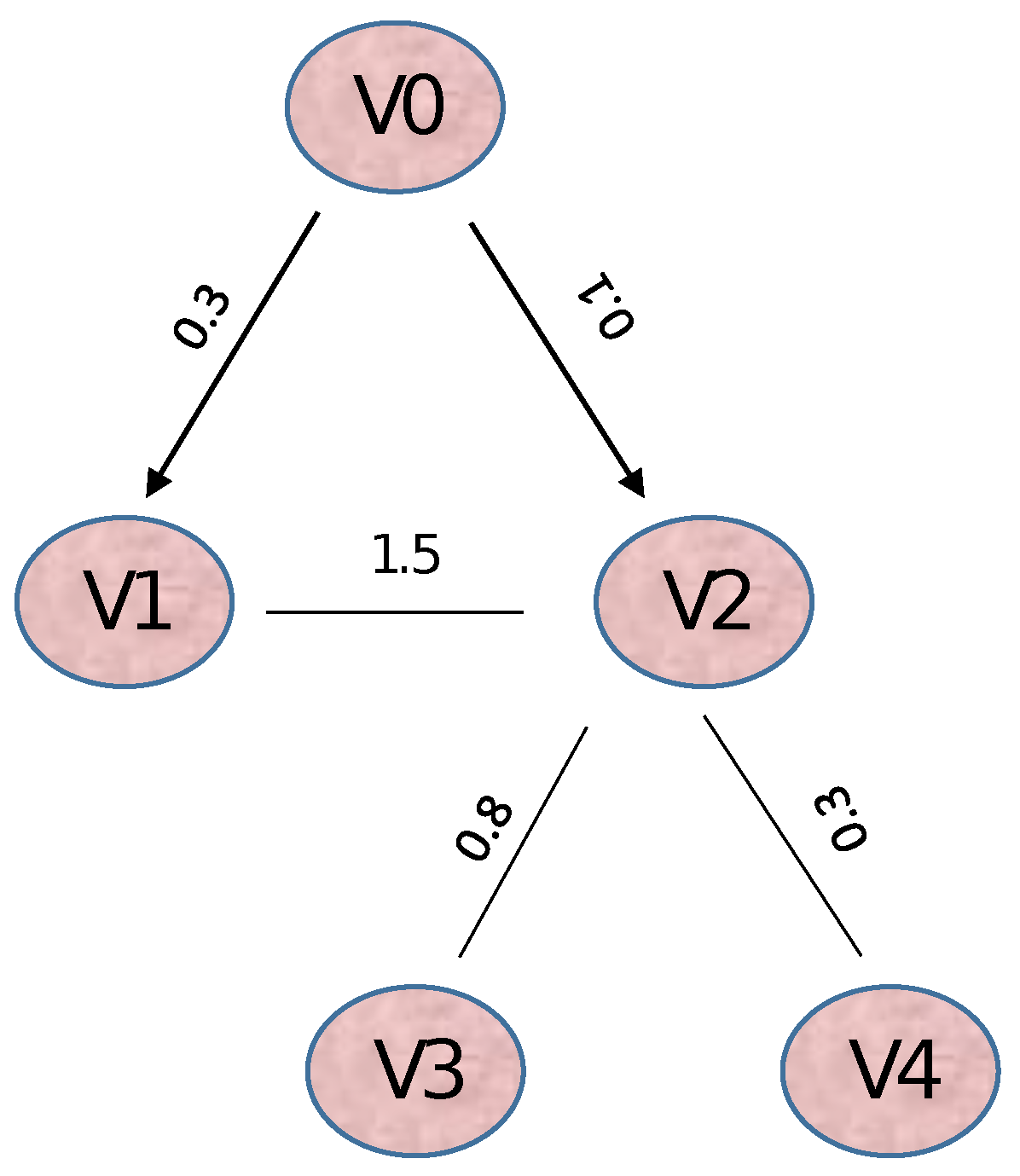
Example 1. Consider a multi-agent system that is defined by (9) and (10) under control law (11) with one leader V0 and four followers V1, V2, V3, and V4 as shown in Figure 2. Consider the following matrices G and H:and Here, , , , , , , , and .
Let by considering Assumption 1: Let . Then, according to Equation (15), =
=
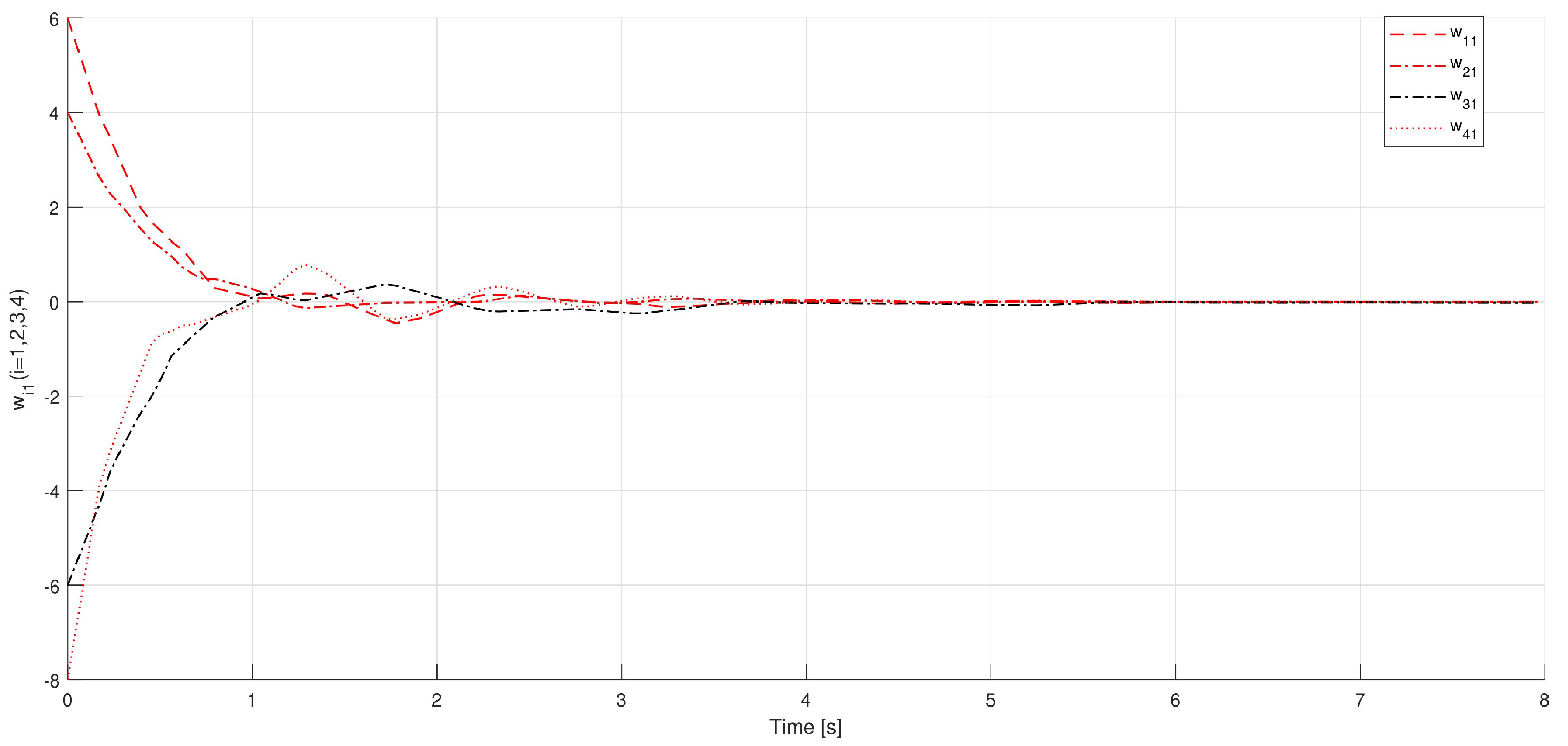
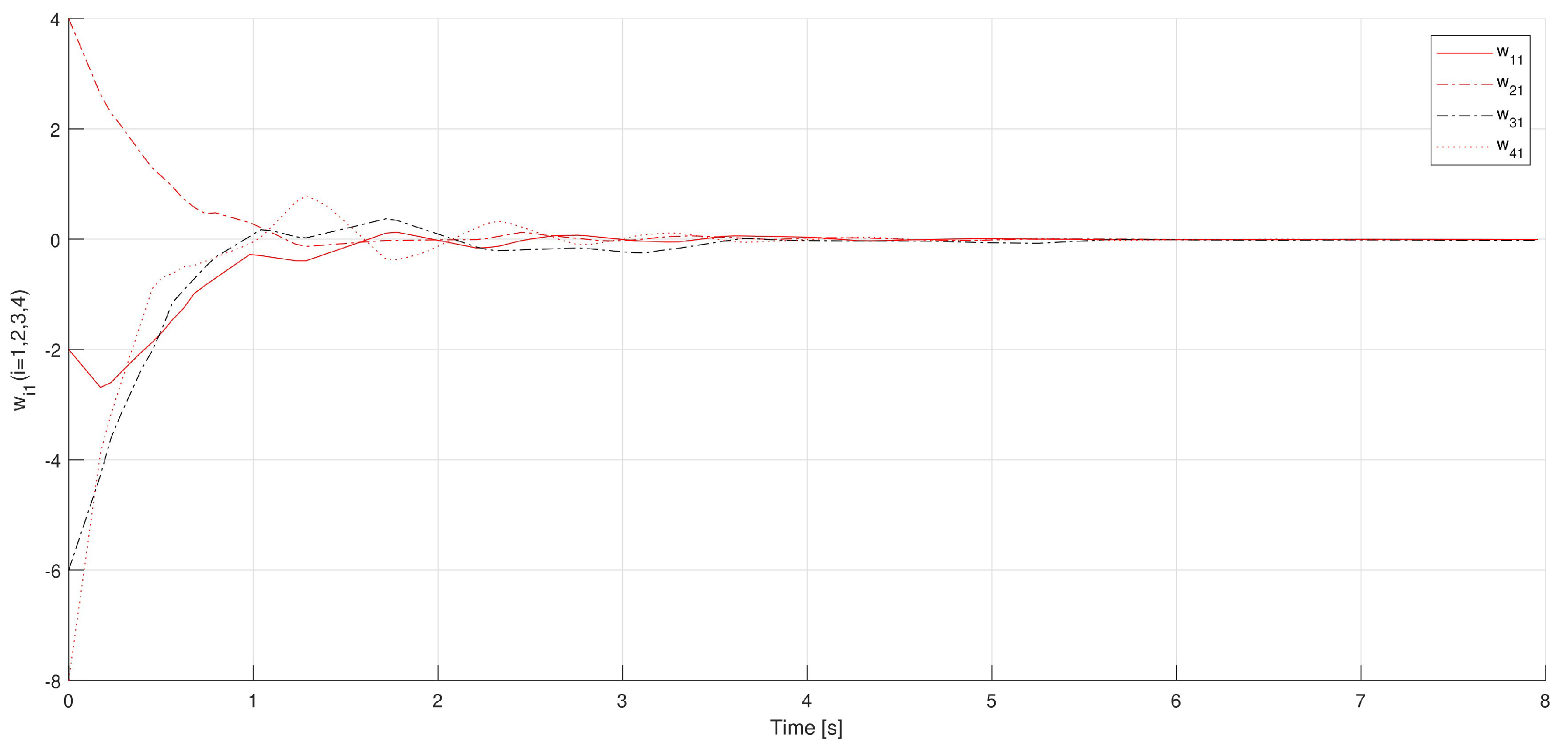
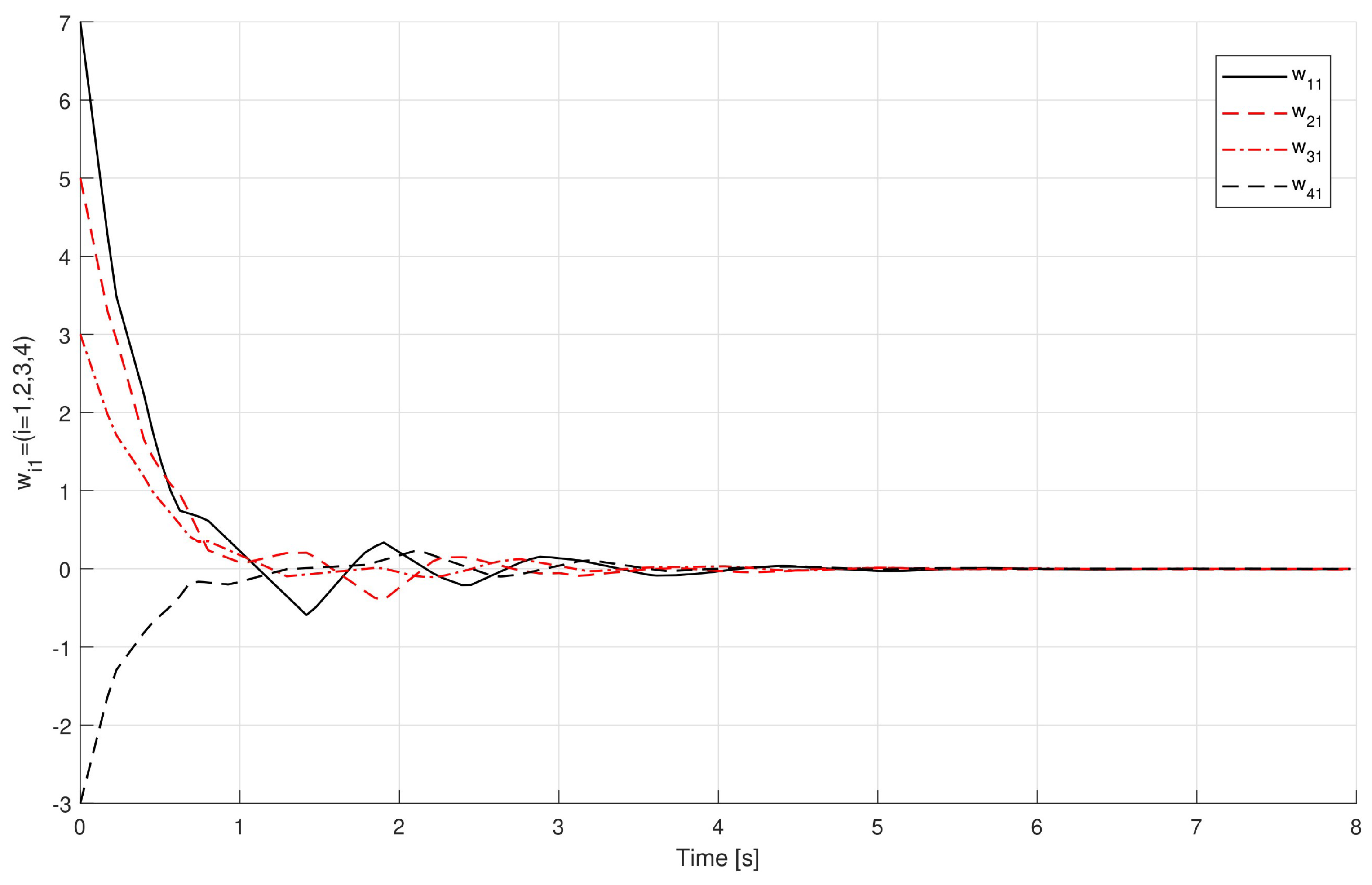
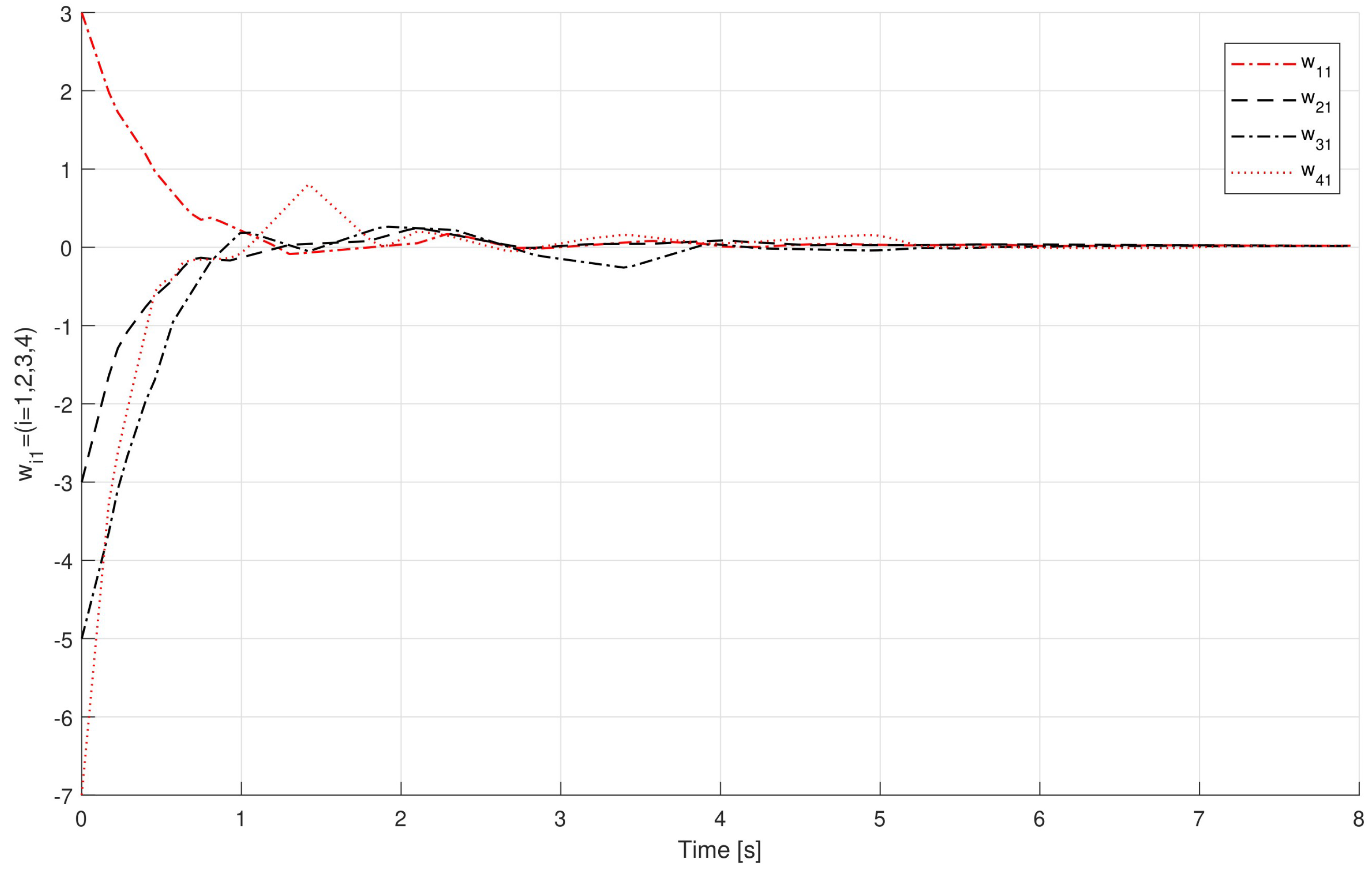
So,satisfying (36) can be chosen. Similarly, (14) implies thatwhere , and . Therefore, can be chosen in order to satisfy (37). In using Theorem 1, the leader-following consensus of systems (9) and (10) on the basis of control law (11) is achieved, and in Figure 3, Figure 4, Figure 5 and Figure 6, the states of the errors are explained. Example 2. Consider a multi-agent system that is defined by (9) and (10) under control law (11) with one leader V0 and four followers V1, V2, V3, and V4 as shown in Figure 7. Let the matrices G and H be taken as follows: and
and
which implies that
Here, , , , , , , , and .
Consider
and
:
Let
. In order to fulfill consensus conditions,
and
can be taken. According to Theorem 1, leader-following consensus of system (
9) and (
10) under control law (
11) with undirected topology is achieved. In
Figure 8,
Figure 9,
Figure 10 and
Figure 11, the states of errors
under different values of
are presented.
Remark 4. In this work, we constructed the error trajectories of the system using MATLAB software. The equations for the error system were solved using the ADAMS predictor–corrector approach. Due to its accuracy and stability when handling fractional order dynamics, this approach works well for solving fractional differential equations. Furthermore, the ADAMS predictor–corrector approach makes it easier to compute precise error trajectories by expecting future solution values and frequently correcting them.
5.1. Significance and Evaluation of Performance Metrics
In the research of fractional-order leader-following consensus in multi-agent systems, the following performance metrics have significance for evaluating system performance:
ISE—integral of the squared error;
IAE—integral of the absolute error;
ITAE—integral of the time-weighted absolute error.
The ISE concentrates on larger errors by squaring the error term, which is very important for ensuring stability by significantly disciplining major variations. On the other side, the IAE offers an unbiased perspective of overall system performance by treating all errors equally, providing insights into the total collective error over time. The ITAE, by weighting errors with time, emphasizes the swift correction of errors, thus emphasizing the system’s responsiveness and robustness, specifically in the face of input and distribution delays. Collectively, these metrics offer the capability to retain accuracy, stability, and efficiency in dynamic, delay-vulnerable conditions through the analysis of the control strategies.
5.2. ISE (Integral of Squared Error)
Mathematically, the integral of the squared error (ISE) is calculated using the following formula:
5.3. IAE (Integral of Absolute Error)
The integral of the absolute error (IAE) is calculated using the following formula:
5.4. ITAE (Integral of Time-Weighted Absolute Error)
The ITAE is determined by summing the product of time and the absolute values of the errors over the given period.
In
Table 1, you can see the performance metrics (ISE, IAE, and ITAE) for the proposed fractional-order leader-following consensus algorithm at different iterations. As the iterations advance, there is a noticeable pattern of decreasing values for all three metrics. The reduction in ISE over the iterations indicates an improvement in the system’s ability to handle large deviations and stabilize more effectively. The decreasing IAE values show a consistent decrease in the overall accumulated error, demonstrating continuous performance improvement. In addition, the significant decline in the ITAE highlights the system’s enhanced ability to promptly correct errors with each iteration, indicating an improved responsiveness and robustness to delays. The following table effectively presents the progressive enhancement in the system’s performance, emphasizing the effectiveness of our control strategy throughout each iteration.
6. Conclusions
Nonlinear leader and follower systems in the fractional format with source and distributed lags resilient-based consensus analysis are discussed in this article. By integrating a delayed nonlinear function into the dynamics of the leader and follower states, we introduced a more realistic and complex model for analysis using the Razumikhin approach used, and with the help of this approach, some suitable conditions were obtained. Utilizing the Lyapunov function method, we rigorously proved the stability of the system, demonstrating that the proposed control strategy effectively mitigates the impact of delays and disturbances. The criteria are expressed as linear matrix inequalities. This provides a suitable way for the calculation of consensus. This leader and follower system is ahead of the weighted directed graph and the results that are acquired are sufficient for drawing an undirected graph. Hence, it can be said that our standard is more than suitable for extensive leader and follower networks. The results of our study validate the practicality and strength of the control method and also establishe a strong basis for future explorations. Prospective routes for future research could involve analyzing the effects of different network structures, adapting the method for various disturbance classes and expanding the framework to encompass additional types of fractional-order systems. The fractional-order leader-following consensus algorithm for multi-agent systems, when assessed with the performance metrics ISE, IAE, and ITAE, showcased remarkable stability, well-rounded error reduction, and improved adaptability to time delays. This will broaden the scope of application and support the robustness of multi-agent networks.
Author Contributions
Conceptualization, A.U.K.N.; software, M.A.J.; validation, Y.Z.; formal analysis, A.K.; resources, A.K.; data curation, S.R.; writing—original draft, S.R.; writing—review and editing, A.U.K.N.; supervision, A.U.K.N. and Y.Z.; project administration, Y.Z. and A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was sponsored by the Key Laboratory of Philosophy and Social Sciences in Guangdong Province of Maritime Silk Road of Guangzhou University (GD22TWCXGC15) and the National Natural Science Foundation of China (Grant No. 622260-101), and also by the Ministry of Science and Technology of China, No.WGXZ2023054L.
Data Availability Statement
The code is considered the intellectual property of the Guangzhou Government project, and is therefore not publicly available.
Acknowledgments
This work was carried out at the University of Lahore, Sargodha Campus. The authors are also grateful for the support from Guangzhou University, China.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
References
- Hung, N.T.; Rego, F.F.; Pascoal, A.M. Cooperative distributed estimation and control of multiple autonomous vehicles for range-based underwater target localization and pursuit. IEEE Trans. Control. Syst. Technol. 2021, 30, 1433–1447. [Google Scholar] [CrossRef]
- Zhang, D.W.; Liu, G.P.; Cao, L. Constrained cooperative control for high-order fully actuated multiagent systems with application to air-bearing spacecraft simulators. IEEE/ASME Trans. Mechatron. 2022, 28, 1570–1581. [Google Scholar] [CrossRef]
- Ziquan, Y.U.; Zhang, Y.; Jiang, B.; Jun, F.U.; Ying, J.I.N. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar]
- Wang, B.; Zhang, Y.; Wei, M. Fixed-time leader-following consensus of multi-agent systems with intermittent control. Appl. Math. Comput. 2023, 438, 127524. [Google Scholar] [CrossRef]
- Colunga, J.A.; Becerra, H.M.; Vázquez, C.R.; Gómez-Gutiérrez, D. Robust leader-following consensus of high-order multi-agent systems in prescribed time. IEEE Access 2020, 8, 195170–195183. [Google Scholar] [CrossRef]
- Nuño, E.; Loría, A.; Panteley, E. Leaderless consensus formation control of cooperative multi-agent vehicles without velocity measurements. IEEE Control. Syst. Lett. 2021, 6, 902–907. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Adaptive leaderless consensus control of strict-feedback nonlinear multiagent systems with unknown control directions. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6435–6444. [Google Scholar] [CrossRef]
- Yang, R.; Liu, S.; Tan, Y.Y.; Zhang, Y.J.; Jiang, W. Consensus analysis of fractional-order nonlinear multi-agent systems with distributed and input delays. Neurocomputing 2019, 329, 46–52. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Wang, Y.; Mu, Y. Time-varying output formation-containment control for homogeneous/heterogeneous descriptor fractional-order multi-agent systems. Inf. Sci. 2021, 567, 146–166. [Google Scholar] [CrossRef]
- Shahvali, M.; Azarbahram, A.; Naghibi-Sistani, M.B.; Askari, J. Bipartite consensus control for fractional-order nonlinear multi-agent systems: An output constraint approach. Neurocomputing 2020, 397, 212–223. [Google Scholar] [CrossRef]
- Chen, L.; Li, X.; Lopes, A.M.; Chu, Z.; Chen, Y. Leader–follower consensus of uncertain variable-order fractional multi-agent systems. Nonlinear Dyn. 2023, 111, 12283–12296. [Google Scholar] [CrossRef]
- Gong, P. Distributed consensus of non-linear fractional-order multi-agent systems with directed topologies. IET Control. Theory Appl. 2016, 10, 2515–2525. [Google Scholar] [CrossRef]
- Zhu, W.; Li, W.; Zhou, P.; Yang, C. Consensus of fractional-order multi-agent systems with linear models via observer-type protocol. Neurocomputing 2017, 230, 60–65. [Google Scholar] [CrossRef]
- Ren, G.; Yu, Y. Robust consensus of fractional multi-agent systems with external disturbances. Neurocomputing 2016, 218, 339–345. [Google Scholar] [CrossRef]
- Yu, H.; Xia, X. Adaptive leaderless consensus of agents in jointly connected networks. Neurocomputing 2017, 241, 64–70. [Google Scholar] [CrossRef]
- Bai, J.; Wen, G.; Rahmani, A.; Yu, Y. Consensus problem with a reference state for fractional-order multi-agent systems. Asian J. Control. 2017, 19, 1009–1018. [Google Scholar] [CrossRef]
- Ma, X.; Sun, F.; Li, H.; He, B. The consensus region design and analysis of fractional-order multi-agent systems. Int. J. Syst. Sci. 2017, 48, 629–636. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, R.C. Modified projective synchronization of fractional-order chaotic systems with different dimensions. Acta Math. Appl. Sin. Engl. Ser. 2020, 36, 527–538. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, Q.; Chai, Y.; Chen, L.; Lopes, A.M.; Chen, Y.Q. Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays. Fractal Fract. 2021, 5, 141. [Google Scholar] [CrossRef]
- Chen, L.; Li, X.; Chen, Y.; Wu, R.; Lopes, A.M.; Ge, S. Leader-follower non-fragile consensus of delayed fractional-order nonlinear multi-agent systems. Appl. Math. Comput. 2022, 414, 126688. [Google Scholar] [CrossRef]
- Khan, A.; Niazi, A.U.K.; Abbasi, W.; Jamil, A.; Malik, J.A. Control design for fractional order leader and follower systems with mixed time delays: A resilience-based approach. Fractal Fract. 2023, 7, 409. [Google Scholar] [CrossRef]
- Battilotti, S.; Cacace, F.; Califano, C.; d’Angelo, M. Leader-following consensus with non-uniform and large communication delays. IEEE Trans. Control. Netw. Syst. 2023, 10, 975–1985. [Google Scholar] [CrossRef]
- Khan, A.; Niazi, A.U.K.; Abbasi, W.; Awan, F.; Khan, A. Fractional-order nonlinear multi-agent systems: A resilience-based approach to consensus analysis with distributed and input delays. Fractal Fract. 2023, 7, 322. [Google Scholar] [CrossRef]
- Jiang, W.; Chen, Y.; Charalambous, T. Consensus of general linear multi-agent systems with heterogeneous input and communication delays. IEEE Control. Syst. Lett. 2020, 5, 851–856. [Google Scholar] [CrossRef]
- Khan, A.; Niazi, A.U.K.; Rehman, S.; Ahmed, S. Hostile-based bipartite containment control of nonlinear fractional multi-agent systems with input delays: A signed graph approach under disturbance and switching networks. AIMS Math. 2024, 9, 12678–12699. [Google Scholar] [CrossRef]
- Khan, A.; Hassan, W.U.; Manzor, A.; Ahmed, S.; Niazi, A.U.K. Strengthening stability with centralized event-triggered control system with the disturbances and artificial time delay in wireless connected vehicle platooning (CVSs). Syst. Sci. Control. Eng. 2024, 12, 2342818. [Google Scholar] [CrossRef]
- Koochakzadeh, A.; Naderi Soorki, M.; Azizi, A.; Mohammadsharifi, K.; Riazat, M. Delay-dependent stability region for the distributed coordination of delayed fractional-order multi-agent systems. Mathematics 2023, 11, 1267. [Google Scholar] [CrossRef]
- Gong, P.; Lan, W.; Han, Q.L. Robust adaptive fault-tolerant consensus control for uncertain nonlinear fractional-order multi-agent systems with directed topologies. Automatica 2020, 117, 109011. [Google Scholar] [CrossRef]
- Meng, X.; Gao, C.; Jiang, B.; Karimi, H.R. An event-triggered sliding mode control mechanism to exponential consensus of fractional-order descriptor nonlinear multi-agent systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2024, 238, 532–544. [Google Scholar] [CrossRef]
- Guo, W.; Zhang, Y.; Li, W. Synchronization for the coupled stochastic strict-feedback nonlinear systems with delays under pinning control. Nonlinear Anal. Hybrid Syst. 2023, 48, 101326. [Google Scholar] [CrossRef]
- Yang, S.; Hu, C.; Yu, J.; Jiang, H. Finite-time cluster synchronization in complex-variable networks with fractional-order and nonlinear coupling. Neural Netw. 2021, 135, 212–224. [Google Scholar] [CrossRef] [PubMed]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}