1. Introduction
Neural networks, mathematical models inspired by biological neural networks, consist of numerous interconnected neurons forming a highly nonlinear dynamic system. They are extensively utilized in diverse fields, such as pattern recognition, data mining, image processing, and natural language processing, to address complex problems [
1,
2,
3,
4,
5,
6,
7]. The functionality of these networks largely depends on their system dynamics properties. For instance, the associative memory and optimization computing power of famous networks directly rely on the global stability of network dynamics. Consequently, the dynamic behaviors of neural networks have attracted considerable interest from scholars across various fields and have yielded a wealth of research findings. He et al. [
8] introduced a novel full-dimensional nonlinear state feedback control strategy to optimize neural dynamics, then established conditions for local stability and Hopf bifurcation in binary-tree-structure and multi-delay diffusion neural network models. Lu et al. [
9] constructed a new delayed neural network with a radial ring structure and bidirectional coupling, and they studied its stability and Hopf bifurcation dynamic behavior. Nie et al. [
10] addressed the problem of coexistence and the dynamical behaviors of multiple equilibria for competitive neural networks.
Despite the significant interest in neural network dynamics in recent years, most research has focused only on the cooperation aspect of neuron relationships, neglecting the competition aspect present in neurons with negative connection weights. Competition is a ubiquitous phenomenon in daily life, manifesting in social networks as hostile or friendly relationships between individuals. Cooperation–competition topology networks have a wide range of specific applications, such as financial market prediction, intelligent optimization, and social network analysis [
11,
12,
13]. Similarly, in neural networks, neurons can regulate information transmission through both promotion and inhibition, making it unrealistic to consider only cooperative scenarios. Therefore, studying neural networks with a cooperation–competition relationship [
14,
15,
16,
17] provides a more accurate reflection of real-world conditions. Exploring how to use the cooperation–competition structure of neural networks to study system dynamics is a worthwhile endeavor.
Fractional calculus, as an extension of classical integer-order differential and integral calculus, has sparked great interest, due to its potential applications in various fields, such as bioengineering, robotics, control, and medical problems. The memory and inheritance characteristics of different materials and processes in fractional-order differential equations make them more accurate than integer-order models when modeling real-world phenomena. Therefore, fractional calculus has been integrated into neural networks. Over the past few years, stability analysis, bifurcation and chaos, synchronization, and other properties of fractional-order dynamic systems have received increasing attention, leading to many significant achievements. Xu et al. [
18] studied the problem of exponential bipartite synchronization of fractional-order multilayer signed networks via hybrid impulsive control. Siami [
19] provided the classical secant condition for the stability analysis of cyclic interconnected commensurate fractional-order systems. Li et al. [
20] investigated the stability control of fractional-order memory resistive neural networks with reaction–diffusion terms. Yin et al. [
21] analyzed the discrete fractional-order LIF model and found that by adjusting the fractional order, neurons and neural network primitives can independently respond to weak signals at a certain frequency, enabling network primitives to achieve ordered cluster discharge. Huang et al. [
22] investigated the bifurcation problem in a class of two delayed fractional-order neural networks with three neurons.
Among these efforts, the aim of bifurcation control is to design a controller capable of modifying bifurcation characteristics to achieve desirable dynamic behaviors. And the design and application of fractional-order control systems have always been highly concerned [
23,
24]. References [
25,
26,
27,
28] studied the fractional-calculus observer of the Lipschitz system and used the obtained state estimation for the final feedback control, providing insights for the control method of fractional-order systems with time delay and laying the foundation for fractional calculus and its application in neural networks. There have also been several studies on the application of bifurcation control controllers in different fields [
29,
30,
31,
32,
33]. Cheng et al. [
34] proposed a hybrid control strategy and considered the problem of Hopf bifurcation control for a complex network model with time delays. Lin et al. [
35] studied a four-dimensional fractional-order two-gene regulatory network with multiple delays, and they introduced a fractional-order PD controller to maintain the stability of the network. Lu et al. [
36] developed a fractional-order proportional–derivative controller to manage the bifurcation of a delayed fractional-order predator–prey system, effectively postponing the occurrence of Hopf bifurcation through the appropriate setting of control parameters. Wang et al. [
37] designed a new hybrid controller, applying negative feedback control and time-delay feedback control, to regulate a dual-delay internet congestion control system accessed by a single resource. Based on the above research, it has proven necessary to introduce topological structures into neural networks for research, especially in the field of competition and cooperation.
Motivated by this framework, we incorporated graph theory into a multi-delay network model featuring cooperation–competition interactions, as a signed graph has both positive and negative interactions. Then, a bifurcation analysis was conducted on a delayed fractional-order neural network with a generalized cooperation–competition topology. This work offers several key contributions:
(1) The Caputo fractional derivative was employed, to expand the delayed neural network model with a generalized cooperation–competition topology into a fractional order model.
(2) The introduction of directed graphs concretizes the competitive–cooperation relationships. Unlike previous studies, we used graph connectivity to describe the relationships between neurons where the connectivity matrix plays a crucial role.
(3) Based on the connection relationship of the directed graph, the ranges of and were determined, to provide sufficient conditions for the stability and Hopf bifurcation of the cooperative competitive network, with time delay as the bifurcation parameter.
(4) To postpone the occurrence of Hopf bifurcation, a nonlinear delay feedback controller was designed for a delayed fractional-order neural network model with a generalized cooperation–competition topology.
The rest of the paper is organized as follows.
Section 2 introduces Caputo fractional-order derivatives and some fundamental theoretical concepts. A delayed fractional-order neural network model with a generalized cooperation–competition topology is established in
Section 3. In
Section 4, the stability of uncontrolled systems and the existence conditions of Hopf bifurcation are investigated. The dynamic behavior of the system after implementing a time-delay feedback controller are also discussed. In
Section 5, several numerical simulations are conducted to validate the previously obtained theoretical results. The effects of fractional-order and controller parameters on system dynamics are analyzed. Our conclusions are summarized in
Section 6.
2. Preliminaries
Definition 1 ([
38]).
The Caputo fractional-order derivative operator is defined as follows:where , when . In particular, when , Definition 2 ([
38]).
We give the Laplace transform of the Caputo fractional derivative, which is defined aswhere when . If then . Next, we provide some basic concepts of a signed graph: a signed graph can be conveniently described by graphs , where represents the node set, and where represents the edge set. The matrix is the adjacency matrix of a signed graph G, defined as follows: if then ; if then . Due to the cooperation–competition relationship between nodes, there is the following definition: if the relationship between node and is competitive (cooperative) then .
Lemma 1. We consider an autonomous system ; if all the eigenvalues ) of satisfy and the characteristic equation has no purely imaginary roots for any then the zero solution of system is Lyapunov globally asymptotically stable.
Definition 3. If a node set Q of a signed graph can be divided into two subgroups and , and if, among them, and meet and , so that for and for then the signed graph is called a structural equilibrium graph.
Definition 4. The signum function is defined as 3. Model Description
Considering a complex dynamic neural network composed of N neurons, the state equations of each node in a delayed fractional order neural network with cooperation–competition topology can be described by the following differential equation:
where
stand for the state of the mth neuron,
a is the self-feedback coefficient,
b and
c is a constant and represents the connection weight,
stands for the coupling strength,
is the activation function,
is the time delay at time
t,
is the neighbor set of node
, and
denotes the symmetric adjacency matrix of the signed graph, describing the cooperation–competition interaction between neurons.
Remark 1. When there is a cooperative relationship between neuron m and neuron n, then . When there is a competitive relationship between neuron m and neuron n, then . Therefore, the term represents the information exchange between the cooperation neighbor m and neuron n. For the convenience of analysis, we take .
Remark 2. When studying competition–cooperation relationships, the introduction of directed graphs concretizes competition–cooperation patterns. Unlike previous studies, we used graph connectivity to describe the relationships between neurons, whereas previous research used connectivity coefficients to describe the relationships between neurons, which made the model complex and difficult to implement. The method proposed in this paper is simple and highly feasible, with adjacency matrix being a key factor.
The structure of competition–cooperation is found in practice commonly. In a real neural network, it often contains a large number of neurons; usually, each neuron is independent but they interact with each other, which is a manifestation of the complexity of complex systems. Lower-dimensional neural networks are the foundation for understanding the dynamics of large-scale networks. This article mainly discusses a fractional-order neural network model with generalized cooperation–competition topology and four neurons. The topology diagram is shown in
Figure 1. The solid line here represents the cooperative relationship between two neurons, while the dashed line represents the competitive relationship. So, the above system becomes
For the convenience of analysis, we make the following assumptions:
(H1) (H2) .
Figure 1.
Topology diagram of neural networks with generalized cooperation–competition topology.
Figure 1.
Topology diagram of neural networks with generalized cooperation–competition topology.
Remark 3. As is well known, the local stability and Hopf bifurcation threshold of a system depend on the linear part of the system. It is necessary for us to linearize network (2) and explore its stability conditions and bifurcation criteria hypothesis (H1). There is usually a time delay in the information transmission between neurons, which is reflected in network (2). Assumption (H2) actually indicates that the time delay between neurons is equal. Remark 4. The adjacency matrix G is crucial in a cooperative–competitive topology relationship. If the competitive and cooperative topological relationship between neurons satisfies an asymmetric adjacency matrix then the model that satisfies the condition will be a simplified version of the model studied in this paper.
Obviously, it is easy to see that system (
2) has a unique equilibrium point, which is defined as
, so a Taylor expansion is performed on the nonlinear function
at
E, and its linear term is taken.
For this article, we mainly considered the study of the stability and Hopf bifurcation of system (
3), and we used a delay feedback controller to delay the start of Hopf bifurcation and expand the stability domain of the system (
3):
where
,
.
4. Main Results
For this section, we selected time delay as the bifurcation parameter, and we studied the stability and Hopf bifurcation of system (
3) without control and with control, respectively. The following are the main results.
In this segment, we mainly studied the dynamic behavior of (
3) without control, and (
3) is equivalent to (
4):
The characteristic matrix
of system (
4),
where
and
.
The characteristic equation corresponding to the above characteristic matrix is
Multiplying
on both sides of Equation (
6), we can obtain
where
,
,
,
,
is a function about
s; the detailed information is presented in
Appendix A, abbreviated as
,
,
,
,
.
We define
and
as the real and imaginary part of
, respectively. And we let
be the root of Equation (
7), and (
7) can be transformed into (
8):
Separating the real and imaginary parts, we obtain
By introducing the trigonometric function formula
,
,
, the first equation of Equation (
9) can be transformed into
Squaring both sides of Equation (
10) makes it easy to obtain
Let
; then, Equation (
11) becomes
In the following, we need to find a condition that ensures that Equation (
12) has at least one root. We define
. From the above analysis, we can obtain the following lemma:
Lemma 2. If , i.e., then Equation (11) has at least one positive root. Proof. Through Equation (
12), it can be seen that Equation (
12) is a one-dimensional quartic equation about
z. If
then
. Also,
is a constant that is always greater than or equal to 0, and
. Therefore, at least one real value
satisfies
. Thus, it can be concluded that Equation (
11) has at least one root
. This complete the proof. □
We assume
where
is a continuous function about
.
Similarly, by applying the trigonometric function formula
,
, the first equation of Equation (
9) can be transformed into
Squaring both sides of Equation (
14) makes it easy to obtain
Let
; then, Equation (
15) becomes
In the following, we need to find a condition that ensures that Equation (
16) has at least one root. We denote
. From the above analysis, we can obtain the following lemma:
Lemma 3. If , i.e., then Equation (15) has at least one root. Proof. Through Equation (
16), it can be seen that Equation (
16) is a one-dimensional quartic equation about
. If
then
. Also,
is a constant that is always greater than or equal to 0 and
. Therefore, at least one real value
satisfies
. Thus, it can be concluded that Equation (
15) has at least one root
. This complete the proof. □
Remark 5. According to the theorem on the existence of roots in a quadratic equation, if then must have a root belonging to . Obviously, is a sufficient condition for ensuring system stability. Similarly, is quite important.
We assume
where
is a continuous function about
.
From
, it can be seen that
In view of
, we have
Suppose Equation (
18) has at least one positive real root.
In order to derive the conditions for the occurrence of the Hopf bifurcation, the following assumptions must be given:
Lemma 4. Let be the root of (7) satisfying , . Then, the following transversality condition holds: Proof. Taking the derivative with respect to
on both sides of Equation (
7), we have
where
are the derivatives of
.
Bringing
into (
23), we have
where
The detailed proof process will be presented in
Appendix B.
Therefore, under the assumptions condition
, we have
Thus, the transversality condition of system (
2) near
is satisfied. □
Next, we consider the dynamic behavior of the system when
. When there is no transmission delay in system (
2), Equation (
7) becomes
where
In order to obtain some of the main results of this article, we made the following assumptions:
(H4) Lemma 5. Under assumption and if then all the characteristic roots of characteristic Equation (26) have negative real parts. Therefore, system (2) is locally asymptotically stable without a time delay. Proof. It follows the assumption
that all the roots
of Equation (
26) satisfy
. By Lemma 1, we can conclude, then, that all the characteristic roots of characteristic Equation (
26) have no purely imaginary roots. Therefore, without the time delay, system (
2) is locally asymptotically stable. □
Based on the above discussion, we can obtain the following main results:
Theorem 1. Assuming that system (2) satisfies hypothesis – and satisfies conditions , , the following statement holds: - (1)
If and hold, system (2) is locally asymptotically stable when . - (2)
If , , , and , hold, system (2) is locally asymptotically stable when , and it is unstable for . Then, system (2) undergoes Hopf bifurcation when .
In recent years, various controllers have been designed to address the Hopf bifurcation problem in controlling fractional-order systems. However, the exploration of the Hopf bifurcation control problem for fractional-order systems with cooperative–competitive topology is limited. To address this limitation, we introduced a time-delay feedback controller, as shown below:
where
is the feedback gain coefficient.
Remark 6. In view of the general thought on polynomial function controllers, a nonlinear delayed feedback controller was designed in reference [39]. We know that the linear term can change the beginning of the Hopf bifurcation in fractional order models, while the nonlinear terms and only affect the frequency and amplitude of bifurcation oscillation, and the feedback gain coefficient has little effect on the frequency of bifurcation oscillation, while has almost no effect. Therefore, we chose to introduce a time-delay feedback controller for bifurcation control in this article. We add the above controller to system (
2); then, system (
2) will be transformed into
Remark 7. Assuming node set , it can be seen that node set V can be divided into two subsets and from definition 3. Therefore, we only need to control one node in each subset when adding control. For this article, we chose to add time-delay feedback controllers to the equations of node and node in system (2). By the Taylor expansion of system (
28), the linearization part of system (
28) at the equilibrium point
can be obtained:
The characteristic matrix
of system (
29),
where
,
,
, and
.
The characteristic equation corresponding to the above characteristic matrix is
where
,
,
,
,
is a function about s, abbreviated as
,
,
,
,
in subsequent articles.
Multiplying
on both sides of Equation (
31), we can obtain
We define
and
as the real and imaginary part of
, respectively. Then, Equation (
32) is equivalent to
We let
be the root of Equation (
31), and we substitute
into Equation (
31) to obtain
Separating the real and imaginary parts, we obtain
By introducing the trigonometric function formula
,
,
, the first equation of Equation (
35) can be transformed into
Squaring both sides of Equation (
36) makes it easy to obtain
Let
; then, Equation (
37) becomes
In the following, we need to find a condition that ensures that Equation (
38) has at least one root. We denote
, noting that
.
From the above analysis, we can obtain the following lemma:
Lemma 6. If , i.e., then Equation (38) has at least one root. Proof. Through Equation (
38), it can be seen that Equation (
38) is a one-dimensional quartic equation about
. If
then
. Due to
being a constant that is always greater than or equal 0 and
, at least one real value
satisfies
. Thus, it can be concluded that Equation (
37) has at least one root
. This complete the proof. □
We assume
where
is a continuous function about
.
Similarly, by applying the trigonometric function formula
,
,
, we can obtain
Squaring both sides of Equation (
40) makes it easy to obtain
Let
; then, Equation (
41) becomes
In the following, we need to find a condition that ensures that Equation (
42) has at least one root. We denote
, noting that
.
From the above analysis, we can obtain the following lemma:
Lemma 7. If , i.e., then the Equation (42) has at least one root. Proof. Through Equation (
42), it can be seen that Equation (
42) is a one-dimensional quartic equation about
. If
then
. Also, due to
being a constant that is always greater than or equal 0 and
, at least one real value
satisfies
. Thus, it can be concluded that Equation (
41) has at least one root
. This completes the proof. □
We assume
where
is a continuous function about
.
From
, it can be seen that
In view of
, we have
We suppose that Equation (
44) has at least one positive real root.
In order to derive the conditions for the occurrence of Hopf bifurcation, the following assumptions must be given:
Lemma 8. Let be the root of (32) satisfying , . Then, the following transversality condition holds: Proof. Taking the derivative with respect to
on both sides of Equation (
32), we have
where
are the derivatives of
.
Because of
Bringing
into (
49), we have
where
The detailed proof process will be presented in
Appendix C.
Therefore, under the assumptions of condition
, we have
Thus, the transversality condition of system (
28) near
is satisfied. □
Next, we consider the dynamic behavior of the system when
. When there is no transmission delay in system (
28), Equation (
32) becomes
where the detailed process of
,
,
,
will be presented in
Appendix D.
In order to obtain some of the main results of this article, we made the following assumptions:
(H6) ,
Lemma 9. Under assumption and if , then all the characteristic roots of characteristic Equation (52) have negative real parts. Therefore, without time delay, system (28) is locally asymptotically stable. Proof. It follows the assumption
that all the roots
of Equation (
52) satisfy
. By Lemma 1, we can conclude, then, that all the characteristic roots of characteristic Equation (
52) have no purely imaginary roots. Therefore, without time delay, system (
28) is locally asymptotically stable. □
Based on the above discussion, we can obtain the following main results:
Theorem 2. Assuming that system (28) satisfies hypothesis , , , and satisfies conditions , , the following statement holds: - (1)
If and hold, system (28) is locally asymptotically stable when . - (2)
If , , , and , hold, system (28) is locally asymptotically stable when , and it is unstable for . Then, system (28) undergoes Hopf bifurcation when .
5. Numerical Simulation
In this section, we will provide two numerical simulation examples to verify the main results obtained in the previous section and the effectiveness of the added delay feedback controller. In this paper, the activation function was chosen as
and its selection met the assumption
. The parameter values of the system were set to fixed values, as shown in
Table 1:
Example 1. In this example, we mainly considered the following uncontrollable fractional-order systems with cooperation–competition relationships: Obviously, we can see that the above system had a unique equilibrium point
. We calculated
and
.
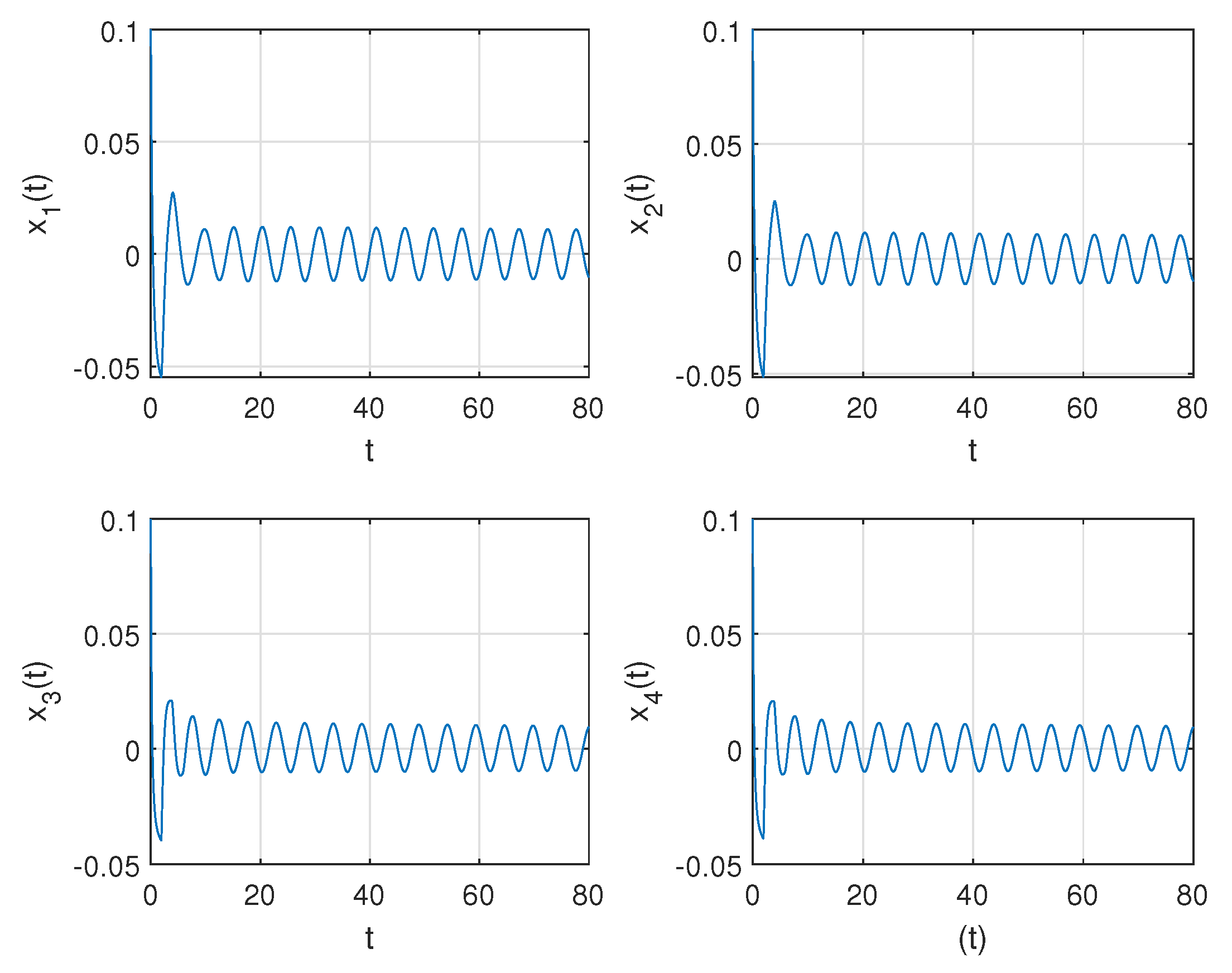
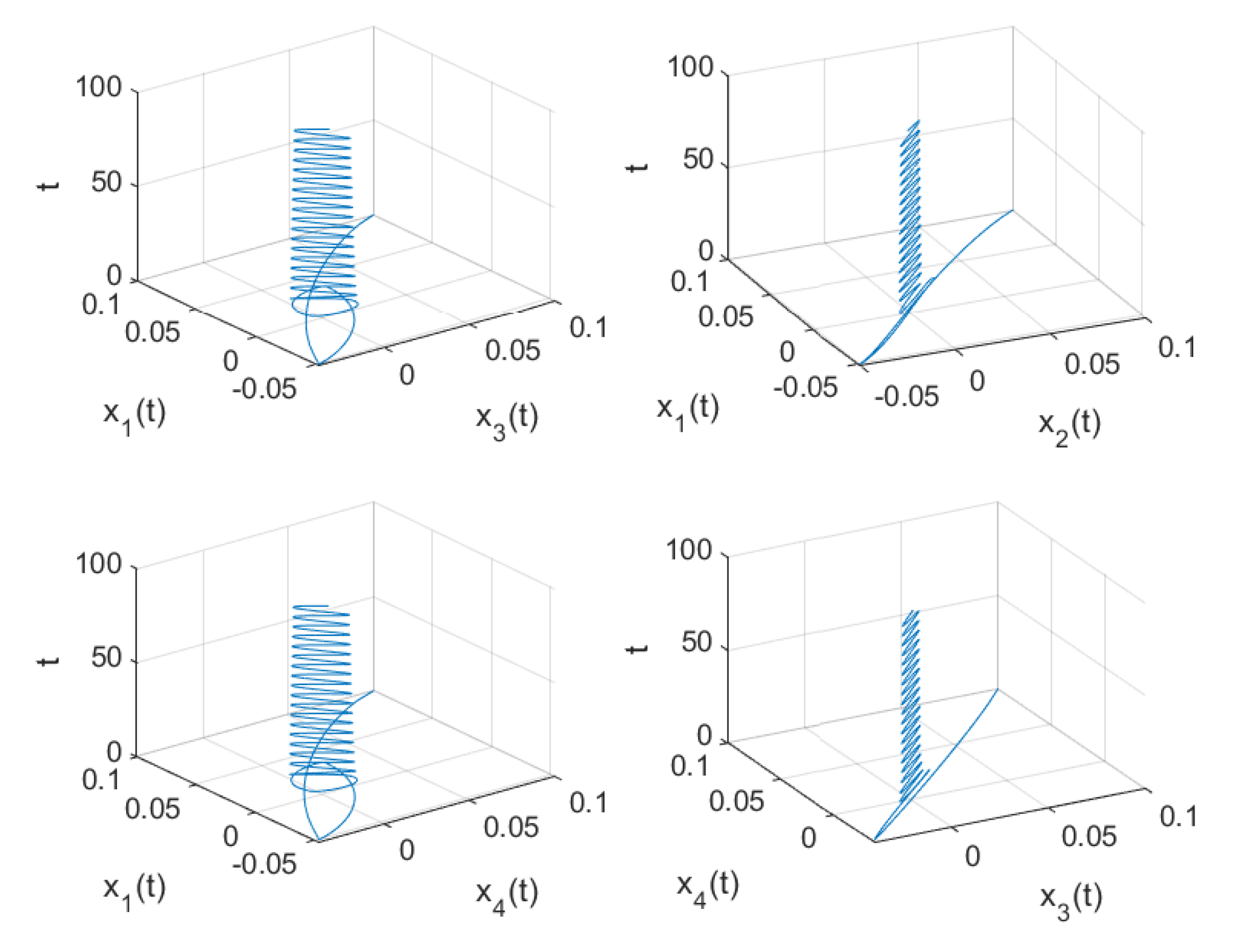
Figure 2 shows the waveform plots and phase diagrams of the neurons in system (
53). From
Figure 2, we find that the system approached a stable equilibrium point
when
, and when
the system lost stability and generated bifurcation periodic solutions near the equilibrium point, as shown in
Figure 3 and
Figure 4. Based on the previous assumptions
–
, the conclusion of Theorem 1 can be confirmed.
Next, we use the control variable method to discuss the effect of orders on the Hopf bifurcation critical value of the uncontrollable system (54). When
changed, its corresponding bifurcation point
and frequency critical value
could be easily determined, as shown in
Table 2 and
Table 3. At the same time, as shown in
Figure 5, we plotted the curve of the bifurcation value changing with order. From the figure, it is evident that the bifurcation value gradually decreased and then increased as the order increased; the bifurcation value was smallest when
.
Example 2. In this example, we mainly considered the following controllable fractional-order system with cooperation–competition relationships: It is obvious that system (
54) had a unique equilibrium,
. In order to better demonstrate the effectiveness of the bifurcation control of the delay feedback controller proposed in this article, we adopted all the parameters and orders set in Example 1. To compare with
Figure 3 and
Figure 4, we still took
and the feedback gain coefficient
. We calculated that the bifurcation point
and the critical frequency
.
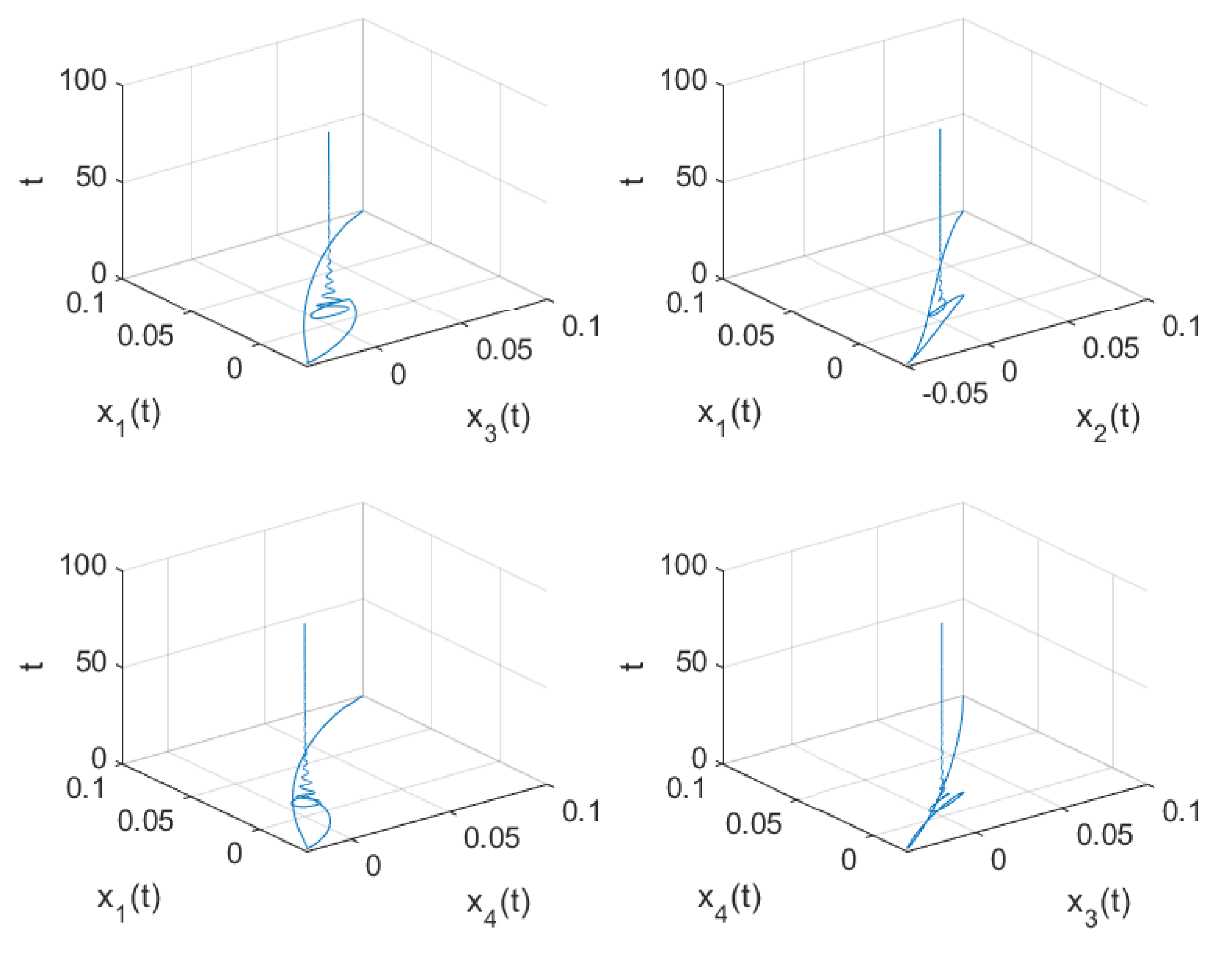
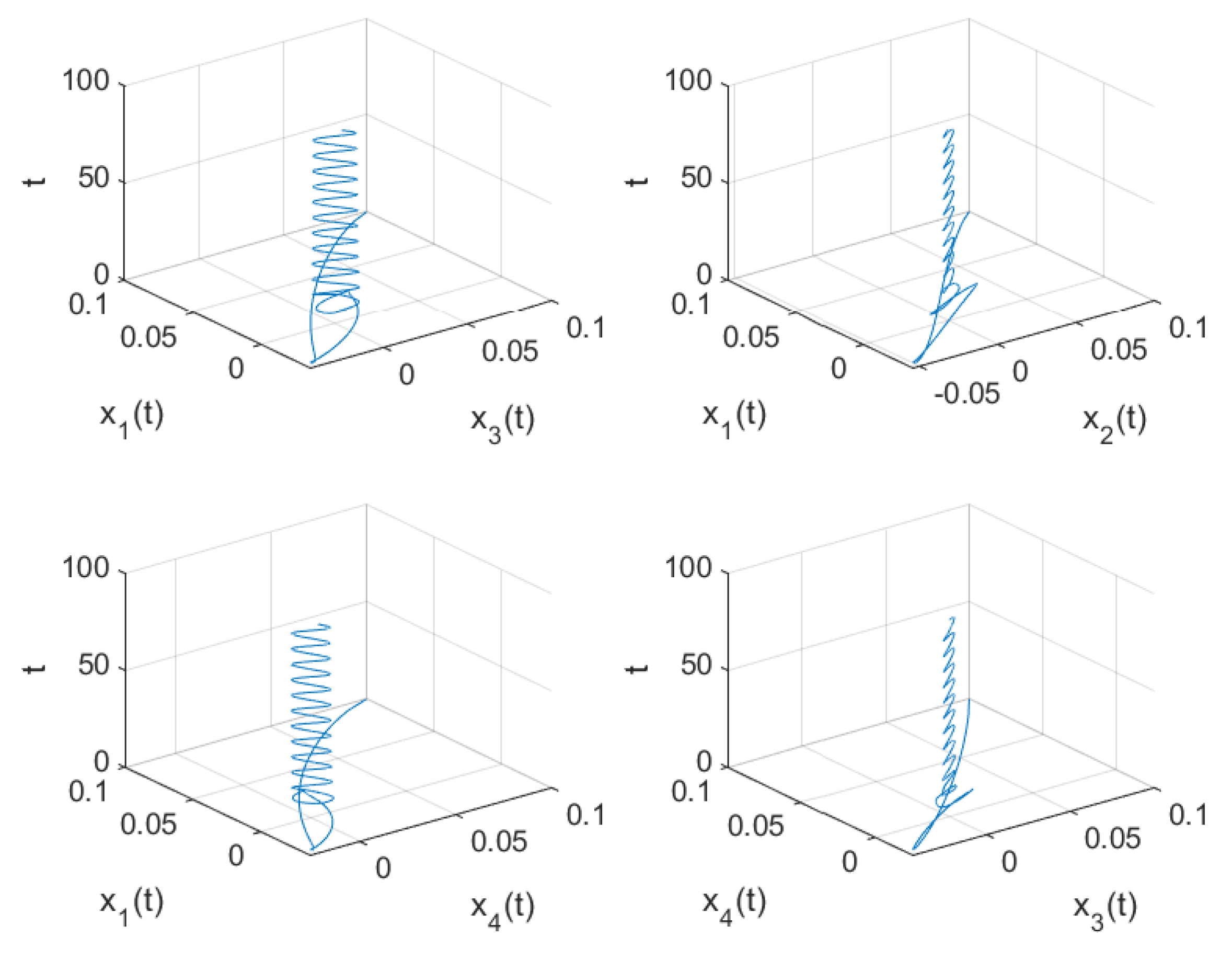
Figure 5 and
Figure 6 show the waveform plots and phase diagrams of the neurons in system (
54). From
Figure 5, we can see that the system approached a stable equilibrium point
when
and when the
the system lost stability and generated a bifurcation periodic solution near the equilibrium point, as shown in
Figure 7 and
Figure 8. Based on the previous assumptions
–
–
, the conclusion of Theorem 2 can be confirmed.
Remark 8. From Figure 2, it can be seen that the uncontrolled system (53) was unstable and that periodic solutions would appear when . Figure 5 shows that at , the controlled system (54) was locally asymptotically stable at the equilibrium point. Comparing Figure 2 with Figure 5, the results show the effectiveness of our designed delay feedback controller. In addition, we investigated the effect of feedback gain parameter
on the dynamic behavior of the system.
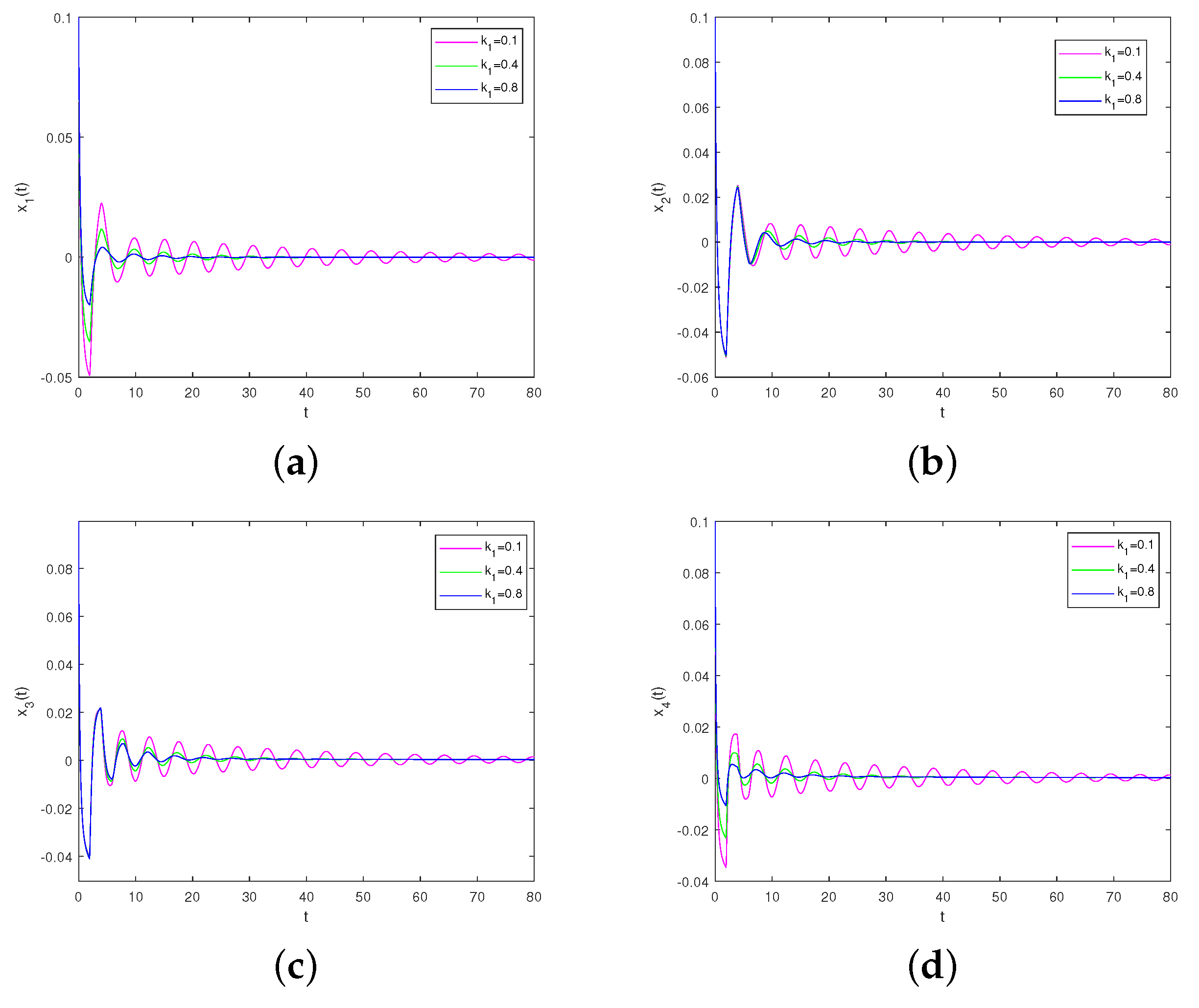
Figure 9 and
Figure 10 show that with the increase of
in system (
54) the bifurcation control of the controller became more pronounced.
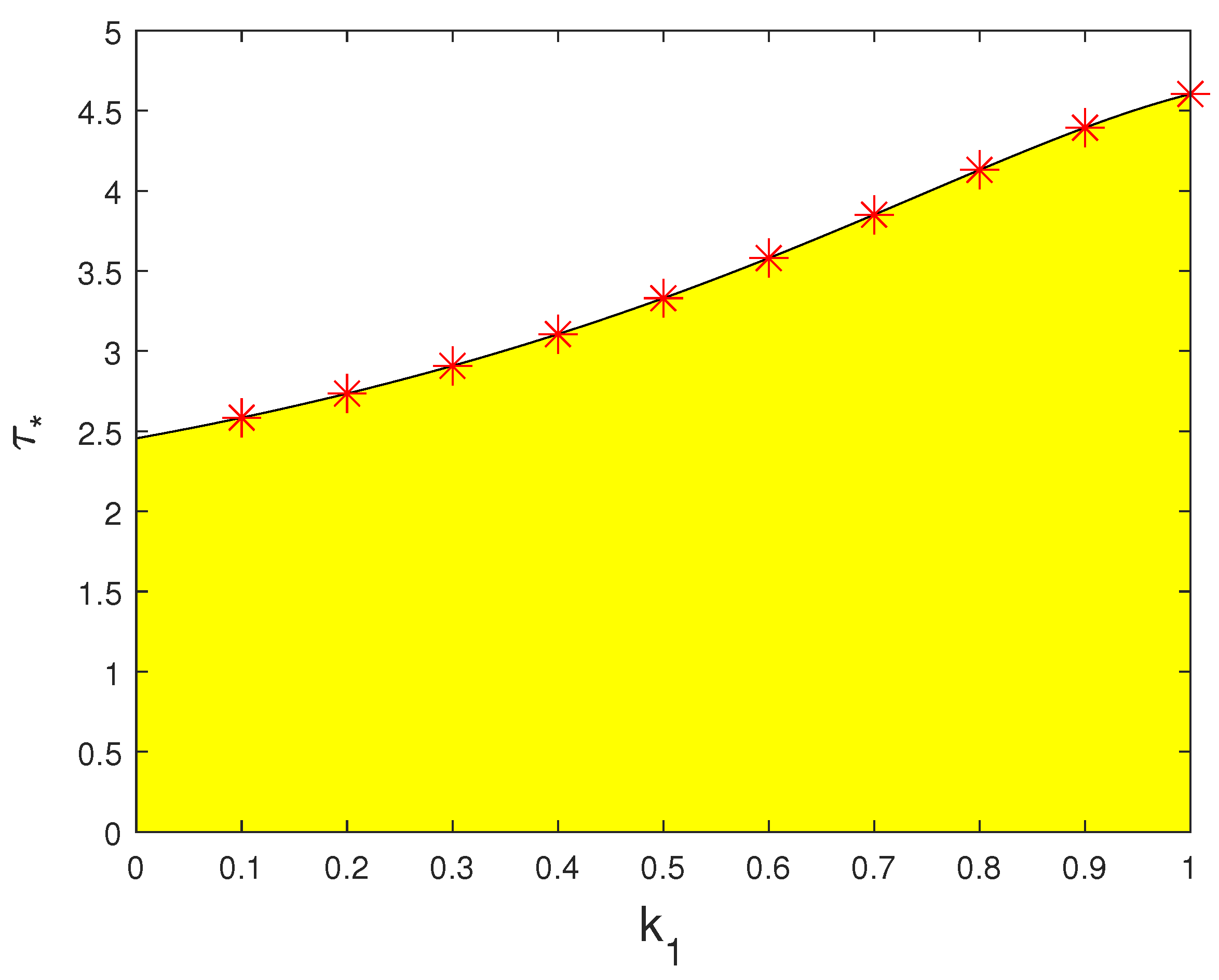
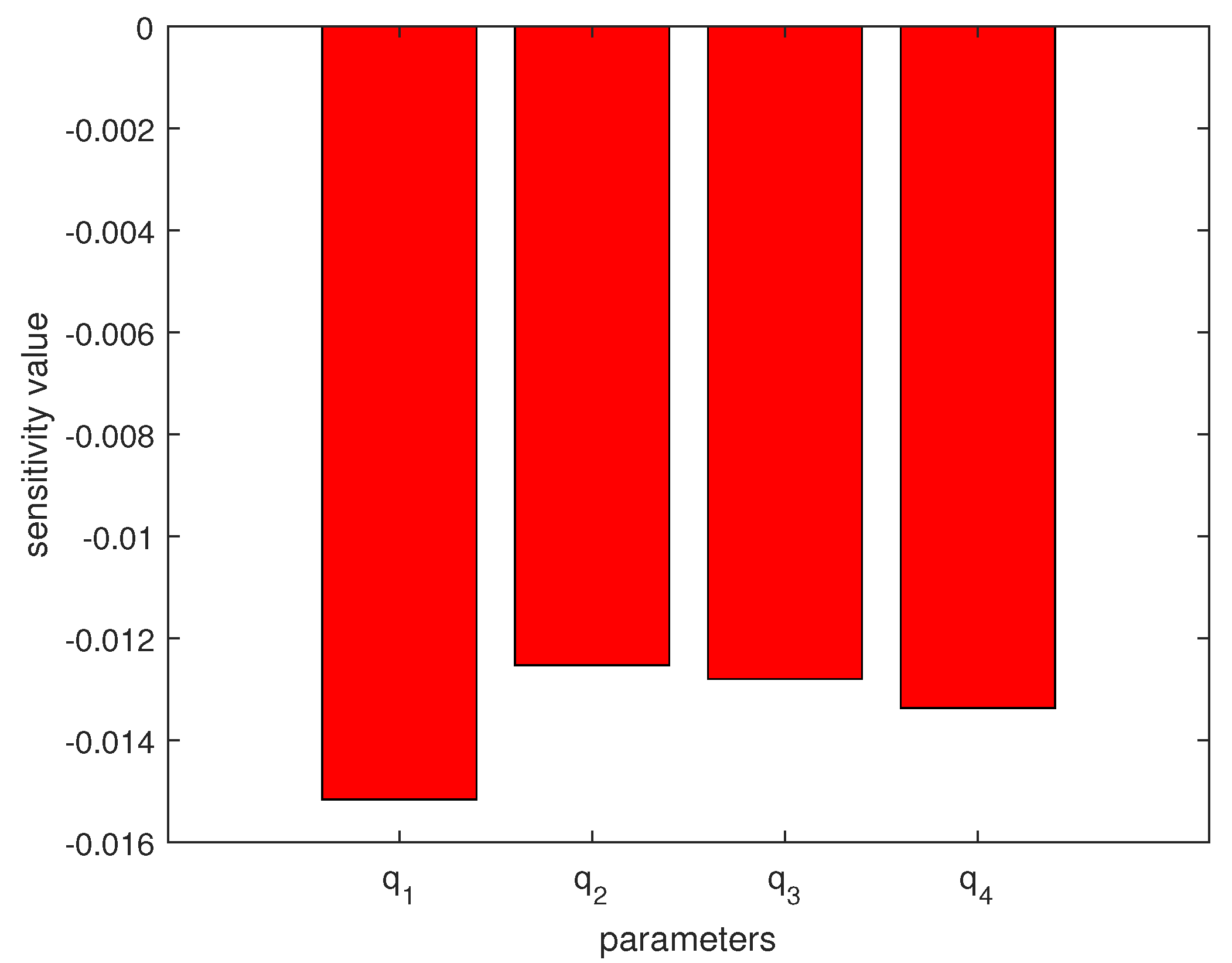
Remark 9. From Figure 10, it can be seen that as the feedback gain coefficient increases, the Hopf bifurcation value of the system increases. The yellow region is the stable region of system (54), which will undergo Hopf bifurcation on the boundary curve. When the values of and τ exceed the region, system (54) will bifurcate out of its periodic solution from the equilibrium point. This indicates that as the feedback gain coefficient increases, the start of the Hopf bifurcation can be delayed, which broadens the stability threshold of the control system, and the bifurcation control of the controller becomes more pronounced. In order to further analyze the impact of changes in the fractional order of the system on bifurcation, we provide a sensitivity analysis of the system to order. As shown in
Figure 11,
has stronger sensitivity to the bifurcation critical value.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}