1. Introduction
The primary expectation of consumers from power systems is to ensure electricity quality. Because voltage and frequency are the main factors indicating the electricity quality, they must always be within the desired range. Deviations in voltage not only damage equipment but also increase line losses as reactive power flows. In power systems, an automatic voltage regulator is a device that provides voltage control to maintain the terminal voltage of the synchronous generator at a precise level. However, the output voltage of the synchronous generator exhibits a fluctuating, unstable output with a high steady-state error due to reasons such as high alternator field winding inductance and load variation. Therefore, an effective control mechanism is required [
1,
2].
Advanced and complicated control methods such as artificial neural network (ANN) [
3], adaptive neuro-fuzzy inference system (ANFIS) [
4], fuzzy logic control (FLC) [
5], and sliding mode control (SLC) [
6] have been used to control AVR systems. However, these control methods have high computational load, expert knowledge, and computational complexity. PID-type controllers without these drawbacks are still the most studied controllers in academia and the most preferred controllers in industry. As in many engineering systems, PID controllers are the most commonly used controllers in AVR systems.
When the studies in the literature are examined, it is seen that in order to improve the control of AVR systems, either a new controller is proposed, a new optimisation algorithm is tried to optimally tune the parameters of the existing controllers, or a modified objective function is specified. First, it can be seen that proportional-integral-derivative (PID) [
7,
8,
9], fractional order PID (FOPID) [
9,
10,
11,
12,
13], and tilt-integral-derivative (TID) [
14,
15] controllers are widely used in the control of AVR systems. Fractional calculus-based FOPID and TID controllers can perform more successful control than PID controllers because they have more tuning parameters, and these tuning parameters have more flexible values. In addition to these, improved versions of PID and FOPID controllers, such as PID plus second-order derivative (PIDD
2) [
16,
17,
18], PID acceleration (PIDA) [
7,
19,
20], sigmoid PID [
21], sigmoid FOPID [
22], FOPID with fractional filter (FOPIDFF) [
23], FOPID plus fractional derivative (FOPIDD) [
9,
24], PID plus second-order derivative with filters (PIDND
2N
2) [
25], cascaded real PID with second-order derivative and fractional order PI (RPIDD
2-FOPI) [
26], and tilt-fractional order integral-derivative with a second-order derivative and low-pass filters (TI
λDND
2N
2) [
27] have been proposed to enhance the control efficiency of AVR systems.
Second, better tuning of the parameters of the controllers allows them to exhibit better control capability. Therefore, researchers prefer optimization algorithms via an objective function (OF) instead of traditional parameter tuning methods. These algorithms are either newly introduced algorithms or hybrid/enhanced versions of existing algorithms. In previous studies, it is seen that the whale optimization algorithm (WOA) [
7], water cycle algorithm (WCA) [
8], symbiotic organism search (SOS) [
9], marine predator algorithm [
11], seagull optimization algorithm [
13], particle swarm optimization (PSO) [
14,
15,
16], multiverse optimization algorithm (MVO) [
17], bat algorithm (BA) [
19], harmony search (HS) [
20], dandelion optimizer (DO) [
22], sin-cosine algorithm (SCA) [
23], equilibrium optimizer (EO) [
27], and gradient-based optimization (GBO) [
28] are used in optimization processes under the control of the AVR system. In addition, improved/hybrid optimization algorithms such as the improved Jaya algorithm (IJA) [
10], improved whale optimization algorithm (IWO) [
18], and nonlinear sine cosine algorithm (NSCA) [
21], are also used.
The better performance of the optimization algorithm is highly dependent on the OF used. When an OF suitable for the characteristic structure of the problem is used, the optimization process is more likely to be successful. The OFs frequently used in tuning the controller parameters of the AVR systems can be listed as Zwe-Lee Gaing (ZLG) [
23,
27], integral time absolute error (ITAE) [
28,
29], and integral time square error (ITSE) [
30].
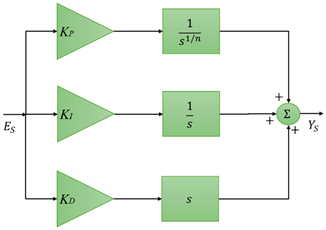
As can be seen from the abovementioned literature summary, efforts to enhance the control performance of AVR systems are mainly based on controller improvement. It is understood that the recently introduced controllers are mostly based on fractional order-based controllers. The extra tuning parameters provided by fractional calculus and its flexible control capability are the most important contributions to this trend. On the other hand, although many studies have been conducted on the development of FOPID controllers, studies on TID controllers are limited. It is known that feedback is of great importance in control systems. In addition, diversity in feedback has not been sufficiently studied in AVR systems. Therefore, it is worth investigating further consideration of feedback diversity and fractional calculus in the design of TID controllers. In this study, an IλDND2N2-T controller is proposed to increase the control performance of AVR systems.
The major contributions of this study are summarized as follows:
- ✓
IλDND2N2-T is proposed for the first time to maintain the terminal voltage of the AVR systems at the desired levels. The success of the controller in AVR systems reveals the potential for its use in solving many engineering problems.
- ✓
The performances of the EO, MVO, and PSO algorithms in solving the AVR problem are analysed, statistical tests are performed, and their successes are compared.
- ✓
The suitability of the EO algorithm, which gives better results than MVO and PSO, with the proposed controller and AVR systems is evaluated.
- ✓
The performance of the proposed IλDND2N2-T controller is compared with PID-type controllers, such as PID, PIDD2, PIDA, and FOPID, and hybrid controllers, including sliding mode control, fuzzy logic, and optimisation algorithms.
- ✓
The effectiveness of the proposed IλDND2N2-T controller against disturbances such as generator frequency variation, load variation, and short circuit faults, which may occur in AVR systems, is validated experimentally.
- ✓
The robustness of the proposed controller on perturbed AVR system parameters is evaluated.
The remainder of this paper is organized as follows. Mathematical modelling of the AVR system is given in
Section 2, a comprehensive definition of the proposed controller structure is provided in
Section 3, used optimization algorithm and design of the objective function are presented in
Section 4, results and discussion are reviewed in
Section 5, and the conclusion is given in
Section 6.
2. Mathematical Modelling of Automatic Voltage Regulator
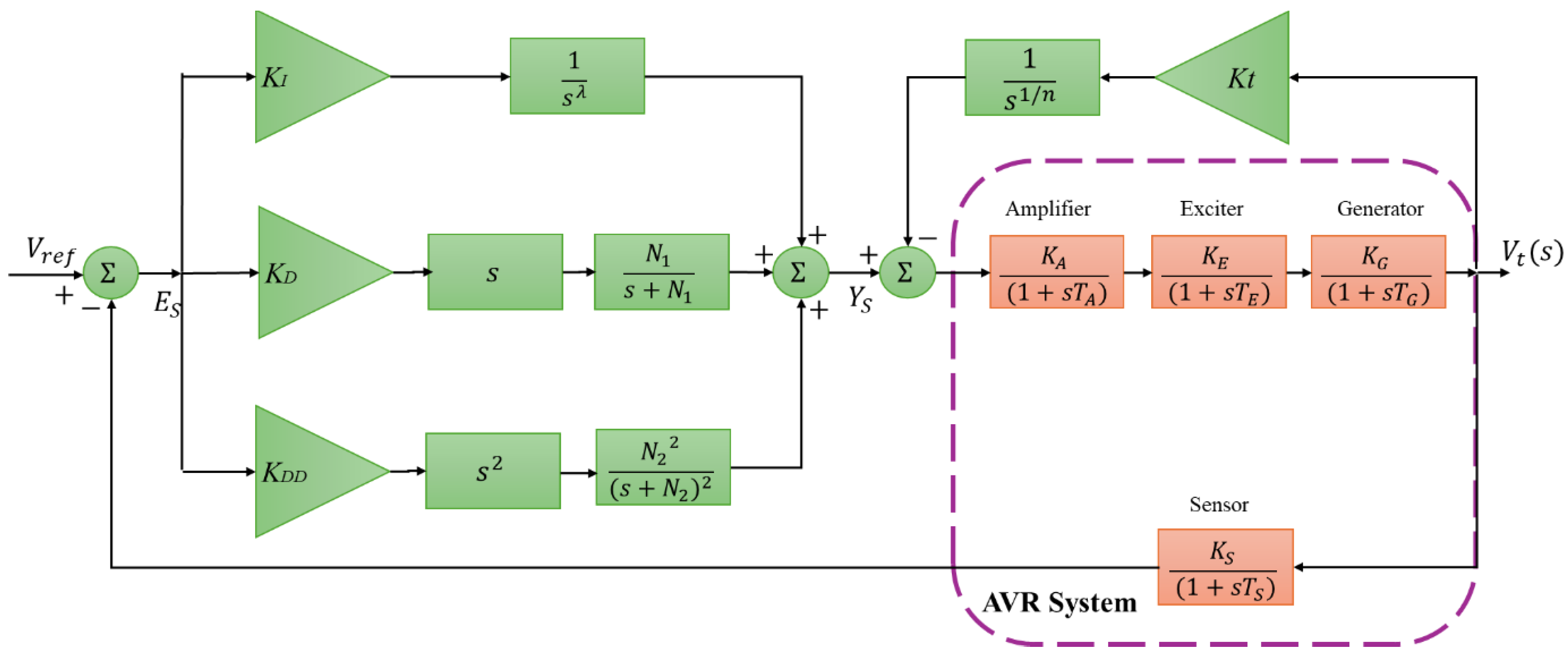
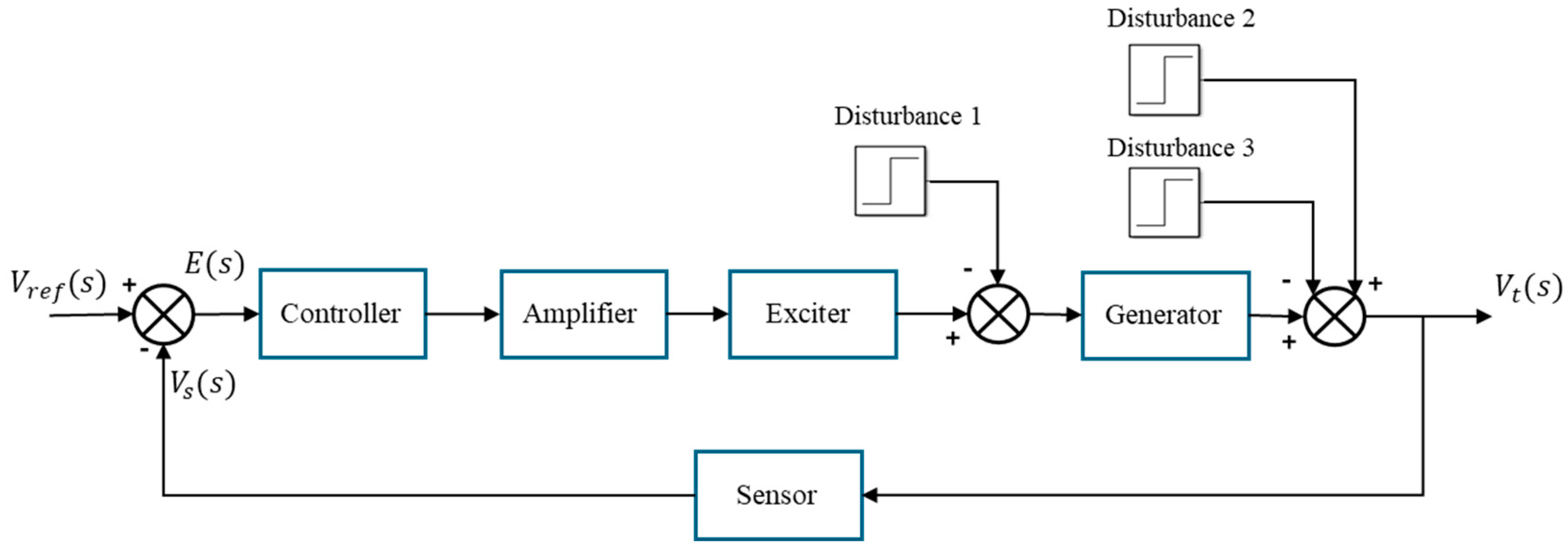
The AVR is responsible for keeping the terminal voltage constant and steady and plays an important role in the safety of power systems. The linearization of nonlinear systems is one of the widely preferred methods in engineering because of its ease of implementation and diversity of applications. In the studies, it is seen that control applications are performed on linearised AVR systems. The block diagram of the linearised AVR system consisting of amplifier, exciter, generator, and sensor is shown in
Figure 1 [
7,
14,
15,
17,
20]. In
Figure 1,
is the reference voltage.
E denotes the error signal,
represents the output signal of sensor, and
indicates the output voltage. The transfer functions of the system components and the ranges of the gain constants and time constants are summarized in
Table 1. In
Table 1,
and
are the gain and time constants of the amplifier,
and
are the gain and time constants of the exciter,
and
are the gain and time constants of the generator, and
and
are the gain and time constants of the sensor.
The gain constants used for the amplifier, exciter, generator, and sensor are 10, 1, 1, and 1, respectively, and the time constants used for these components are 0.1, 0.4, 1, and 0.01. These values, selected from the gain and time constant ranges given in
Table 1, are widely used in the literature [
7,
14,
15,
17,
20]. Equation (1) gives the generalized closed-loop transfer function of the AVR system obtained using
Figure 1.
Equation (2) gives the closed-loop transfer function of the AVR system derived from
Table 1, Equation (1), and the values of the constants.
4. Optimization Process and Objective Function
Equilibrium optimizer (EO) is a physics-based meta-heuristic algorithm and is proposed by Faramarzi [
34]. EO attempts to achieve equilibrium states in the control volume. It imitates the dynamic and equilibrium cases associated with mass balance models where each concentration is randomly updated to reach the equilibrium case. The equation of mass balance is as follows:
where
V is the control volume (CV),
C represents the CV concentration, and
is the variety rate of mass in CV.
Q depicts the volumetric flow rate in coming and going out the CV.
G is the rate of mass produced in the CV.
is the equilibrium state within the CV. Taking
as a function of
and then applying some modifications, Equation (10) is obtained.
The λ given in Equation (10) is obtained during the adaptations and more details can be found in [
34]. Where
is the starting time based on the integration space.
Like other meta-heuristic optimization algorithms, EO requires an initial population to start the process. The initial concentrations are arranged according to the size and number of particles, and this is shown in Equation (11).
is the initial concentration.
and
are the maximum and minimum amounts. The vector
is a value that varies randomly between 0 and 1.
depicts the population number.
In the EO algorithm, there are five candidate equilibrium particles, four of which are the best so far and one of which is the average of these four best particles. The vector formed by these five particles is shown in Equation (12).
Equation (13), derived by modifications to Equation (10), is responsible for updating the concentration.
and
are vectors that vary randomly in the range 0–1.
and
indicate the maximum number of iterations and the current number of iteration, respectively.
and
are constant values related to the exploration and exploitation phases, respectively. In simulations, the effectiveness of the exploration and exploitation phases on the solution can be increased or decreased by increasing or decreasing the constant values
and
.
determines the action of the exploitation and exploration.
The generation rate (
G) improves the exploitation step to encounter better results. Expression of
G is given in Equation (14).
and
are randomly varying numbers between 0 and 1.
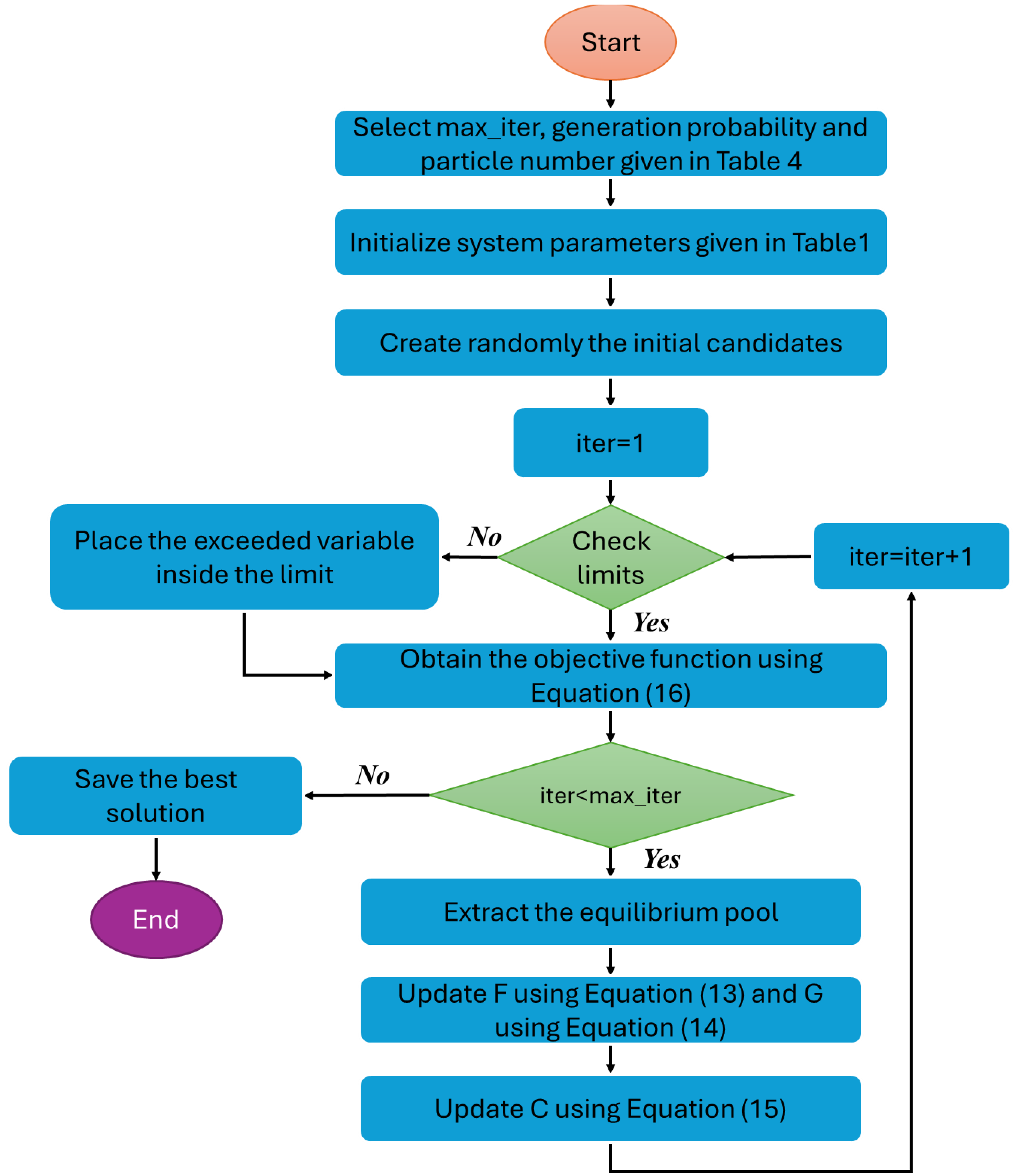
GP is the possibility of generation. This value was taken as 0.5 in this study in order to balance between the exploration and exploitation stages. Updating procedure of the EO is given in Equation (15).
The values taken for the experiments of the EO algorithm in this study are given in
Table 4.
Figure 3 shows the flowchart of the EO algorithm.
An objective function is required for applying optimization methods to problems. Optimum controller parameters are obtained during the maximization or minimization of a selected objective function. In engineering problems, there are integral-based objective functions such as the integral absolute error (IAE), integral time absolute error (ITAE), integral square error (ISE), and integral time square error (ITSE), which are calculated directly from the error value (reference input-feedback), as well as objective functions obtained in accordance with the structure of the problem.
The objective function utilized in this study is widely used in AVR systems and provides successful results. The objective function is given in Equation (16) [
35].
β is the weight coefficient,
represents the overshoot, and
denotes steady-state error.
and
are rise time and settling time, respectively. β is generally taken between 0.5 and 1.5 in the literature. In the case of β > 0.7, steady-state error and overshoot drop and in the case of β < 0.7, the settling and rise time drop. It was taken as 0.5 in this study. Optimization parameters are
,
,
, λ,
,
,
and n, for the IλDND2N2-T controller. The lower and upper limits of these parameters are [0, 0, 0, 0.1, 10, 10, 0, 1], [5, 5, 5, 1.5, 500, 1000, 5, 10], respectively.
5. Results and Discussion
In this section, first, the parameters of the proposed controller are optimized using the EO, MVO, and PSO algorithms, and the most compatible optimization algorithm with the controller and AVR is determined. Then, the results of the proposed IλDND2N2-T-EO are compared with the results presented in previous studies. In the following sections, the impact of possible disturbances on the AVR system outcome and the robustness test of the AVR system under perturbed system parameters are performed, respectively.
Matlab 2023a and Simulink were utilized in the realization of the experiments. The properties of the computer on which this study is conducted are intel i5-10400 CPU, 2.9 Ghz, 16 GB ram.
5.1. Achievement of the EO, MVO, and PSO Algorithms in AVR Systems with IλDND2N2-T Controller
Firstly, the parameters of the proposed controller are optimized using the PSO, MVO, and EO algorithms. MVO stands out with its features, such as including parameters that increase the accuracy of local searches, emphasising local searches throughout the optimisation process, and increasing the convergence success by performing local searches proportionally to the number of iterations [
36]. PSO is applied to many engineering problems with the advantages of having fewer tuning parameters and a high convergence speed [
37,
38]. In the EO algorithm, the random variation of the concentrations of the search agents allows the algorithm to avoid local optima throughout the optimisation process by improving the exploratory search in the initial iterations and the exploitative behaviour in the final iterations [
34].
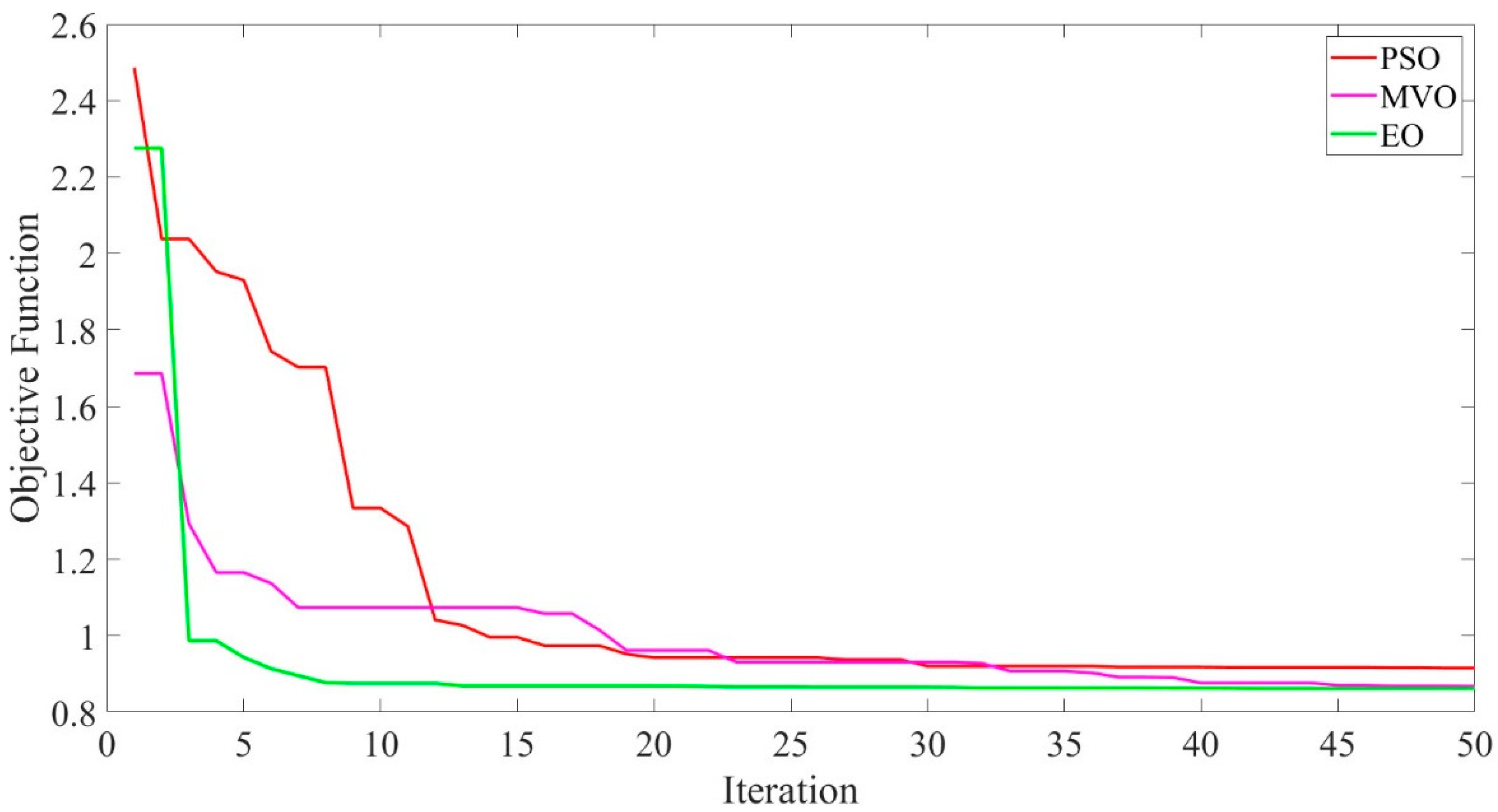
In this study, the experiments were repeated 30 times for each algorithm and the population and iteration numbers were taken as 50.
Figure 4 shows the convergence curves of the utilized algorithms. Accordingly, while the MVO algorithm draws attention with its lower starting value, the EO algorithm falls to the lowest levels the fastest. The fact that the EO algorithm quickly converges to low objective function values shows that it will be successful at lower iteration numbers, but PSO and MVO cannot provide the same performance at low iteration numbers.
Table 5 presents the statistical tests of the PSO, MVO, and EO algorithms utilized in solving the AVR system problem. All optimization algorithms are run 30 times for each simulation study to contribute satisfying and powerful acceptance in the statistical analysis. Accordingly, it is seen that the EO algorithm exhibits better values in minimum, maximum, standard deviation, and mean values. Although MVO has a clear superiority over PSO in terms of minimum, maximum, and mean values, they are close to each other in terms of standard deviation. These results demonstrate that these two algorithms give similar results in terms of distances from the mean values.
Since the EO algorithm outperformed the PSO and MVO in this study, the controller parameters obtained with EO were used in the rest of this study.
5.2. Evaluation of IλDND2N2-T Controller Performance
In this section, the achievement of the proposed I
λDND
2N
2-T EO controller is approved by comparing it with the PID-improved whale optimization algorithm (IWOA) [
39], PID-multiverse optimizer (MVO) [
17], PID-sin-cosine algorithm (SCA) [
40], PID-artificial rabbits optimization algorithm (ARO) [
41], PIDA-harmony search algorithm (HSA) [
42], PIDA-teaching learned-based optimization (TLBO) [
42], PIDA-WOA [
7], PIDD
2-PSO [
16], PIDD
2-EO [
24], FOPID- marine predator optimization algorithm (MPA) [
11], FOPID-heap-based optimization (HBO) [
11], FOPID-hybridization of MPA and safe experimentation dynamics algorithm (MP-SEDA) [
12], FOPID-seagull optimization algorithm (SOA) [
13], FOPID-SCA [
40], Fuzzy-PID [
43], sliding mode control with grey wolf optimizer (SMC-GWO) [
6], and sliding mode control with SCA (SMC-SCA) [
6].
The methods chosen for comparison are derived from studies carried out in recent years.
Table 6 presents the parameters of the related controllers.
Table 7 lists the time domain specifications, such as settling time, rise time, and overshoot of the terminal voltages of the AVR systems with different controllers. In
Table 7, it can be seen that transient responses are high in AVR systems controlled by PID, whereas these values are lower in AVR systems controlled by FOPID. This is the main indicator of the increase in control performance from integer order to fractional order.
Also, it can be mentioned that the PIDA controllers perform slightly better than the PID controllers. This situation can be difficult to understand when the PID and PIDA controllers are directly compared in
Table 7, but if the PID WOA and PIDA WOA controllers are compared, the superiority of PIDA over PID can be seen because the comparison conditions are equal. Considering the systems with PIDD
2 controller, it is seen that it exhibits better control ability than PID, FOPID, and PIDA due to the contribution of the second-order derivative term.
On the other hand, among the compared controllers, the proposed IλDND2N2-T controller has the lowest settling time of 0.0564 s and the lowest rise time of 0.0357 s. In addition, it is one of the controllers with the lowest overshoot. The main reasons for this achievement are the extra second-order derivative term, the low-pass filters in both the first and second-order derivative parts, and the feedback tilt compensator.
Figure 5 shows the step response of the AVR system controlled by the proposed I
λDND
2N
2-T controller in this study and the proposed controllers in recently published papers. Since showing more studies in the same graph would make it difficult to understand the graph, only the studies whose controller parameters are given in
Table 6 are shown in
Figure 5. It is clear from
Figure 5 that PID MVO decreases the overshoot of the terminal voltage and increases the settling time, whereas PID IWOA exhibits the opposite effect. It is also seen that FOPID controllers perform better than PID controllers, but they are not as successful as PIDD
2 controllers in terms of overshoot, settling time, and rise time values. On the other hand, it can be clearly observed that the proposed controller outperforms the compared controllers in terms of time domain specifications.
5.3. Controller Behaviour Against the Disturbance Effects
The controllers must maintain the stability of the system against disturbances in extraordinary situations. In simulation studies, disturbances are also taken as inputs in the systems. The difference between these disturbing inputs and the reference input of the system is that they are unpredictable regarding when and how large they are. Therefore, we investigated the impact of sufficiently large disturbances on the system and how the proposed controller copes with these disturbance effects.
Some effects that are likely to occur in AVR systems have been modelled as step functions and applied to the system. These effects are as follows:
Disturbance 1: Disturbance 1 is considered as an input to model the deviation in the generator frequency and the effects of other generators in a multi-machine system. Disturbance 1 is applied at the 10th second with an amplitude of −1 pu and is performed before the generator as shown in
Figure 6.
Disturbance 2: Disturbance 2 is evaluated to model the load changes. Disturbance 2 is applied at the 20th second with an amplitude of +1 pu and is practiced after the generator as shown in
Figure 6.
Disturbance 3: Disturbance 3 is designed to model short circuit faults in the output voltage. Disturbance 3 is practiced at the 30th second with an amplitude of −1 pu and is applied after the generator as shown in
Figure 6.
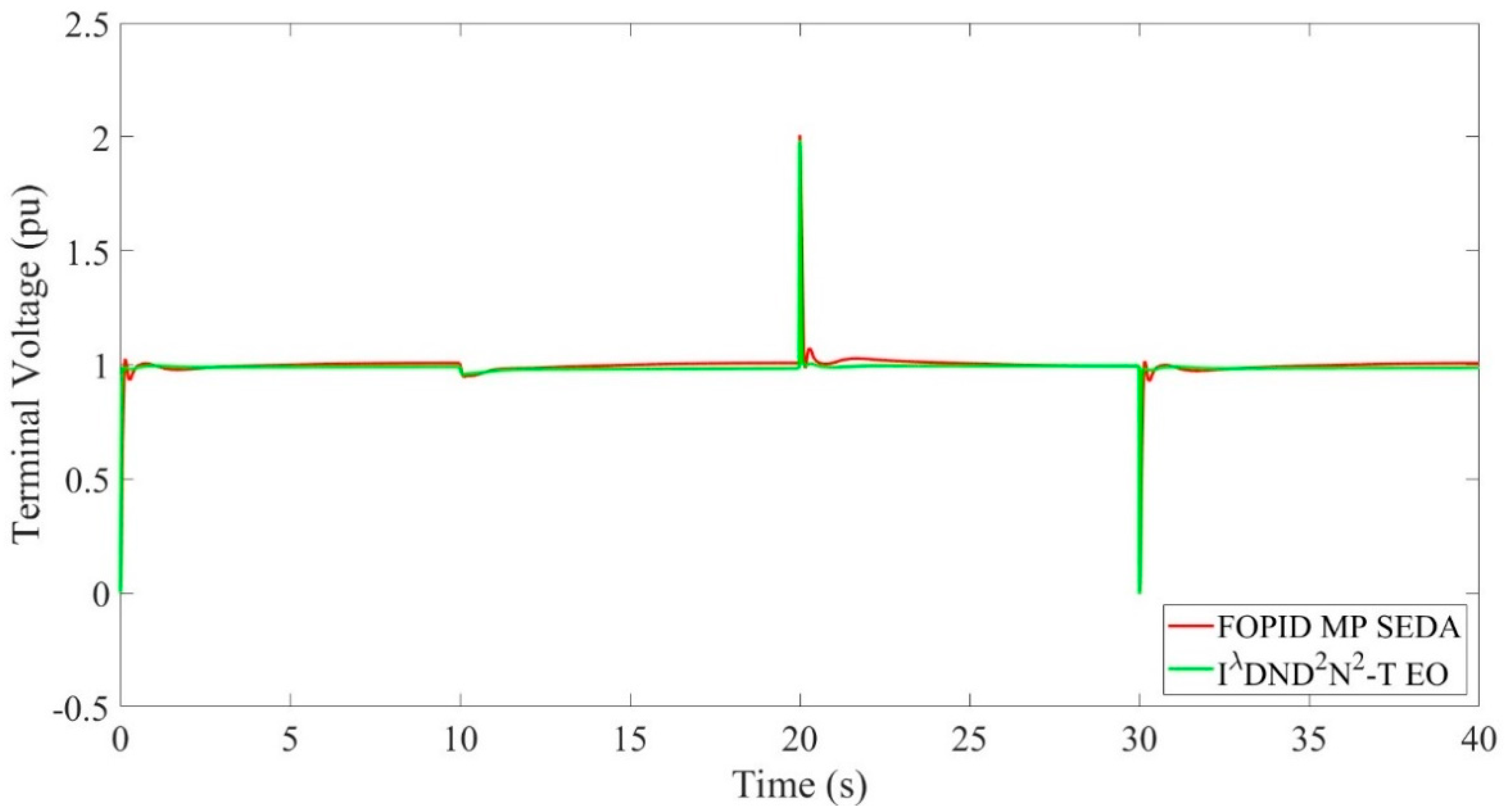
Figure 7 shows the step response of the AVR system’s terminal voltage against the modelled disturbances. In
Figure 7, the AVR system is controlled by the proposed controller and FOPID MP SEDA, and the terminal voltage outputs are compared. According to the time domain characteristics in
Table 7, the system controlled by FOPID MP SEDA was selected for comparison because it has the lowest rise time. It is clear from
Figure 7 that after the Disturbance_1 is applied at t = 10 s, the proposed controller successfully restores the terminal voltage to the reference level. It reacts faster to disturbance than FOPID MP SEDA. The proposed controller has shown more favourable results than FOPID MP SEDA in terms of shortness of settling time and low fluctuation after the disturbance inputs applied at t = 20 s and t = 30 s. The proposed controller provides superior control against undesired and unexpected disturbance inputs.
5.4. Robustness Tests
Like all engineering systems, the AVR may not always work as desired, and due to external or internal effects, the time constants of its components may change. In order to examine the success of the proposed controller against such deteriorations in the system parameters, a robustness test is applied to the system. For this purpose, the time constants of the components are changed at the rates of
25% and
50%, and the time domain specifications obtained as a result of the changes are given in
Table 8 and the step response is given in
Figure 8.
According to
Table 8, the highest value of the terminal voltage is 1.3155, where
changes by −50%. The highest value of the settling time is 0.3851 s, where
changes by −50% and the highest value of the rise time is 0.1870 s, where
changes by +50%. As can be seen, the greatest effect on the rise and settling times is the change in
, while the change in the time constant
in the sensor is not as effective as that of the other components.
The results indicate that even under the worst conditions, the AVR system with the proposed controller gives better results than an AVR system with PID and FOPID controllers operating under nominal conditions.
As can be seen in
Figure 8, the distortions in
lead to the highest peak value. After the deterioration caused by the changes in
, the highest deterioration is caused by the changes in
and
, respectively. However, it should be clearly stated that there is not much difference between the nominal values of the AVR system components and the degraded system parameters.
6. Conclusions
In this paper, a fractional order integral-derivative plus second-order derivative with low-pass filters and tilt controller (IλDND2N2-T) is proposed to keep the terminal voltage output at a constant value in AVR systems. In this study, EO, MVO, and PSO algorithms are used to optimise the controller parameters, among which the EO algorithm with the lowest objective function value and the best statistical test result is selected for this study. The superiority of the proposed controller in transient responses, such as settling time, rise time, and overshoot is demonstrated by comparing it with controllers proposed in previous studies. Afterwards, the achievement of the IλDND2N2-T controller against disturbances such as generator frequency deviation, load variation, and short circuit current that may occur in AVR systems is expressed by simulations. Finally, the superior performance of the proposed controller against disturbances in the time constants of the amplifier, exciter, generator, and sensor in the AVR system is given in graphs and tables. As a result, the proposed controller can be successfully used to control AVR systems and can be used to control other engineering problems. In addition, the successful results of the proposed controller in this study may pave the way for testing it first on a prototype AVR system and then on a real-scale system. In future studies, the proposed controller will be applied to other problems in electrical and electronics engineering.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}