
New Generalized Jacobi Galerkin Operational Matrices of Derivatives: An Algorithm for Solving Multi-Term Variable-Order Time-Fractional Diffusion-Wave Equations


Abstract
1. Introduction
- (i)
- We introduce two classes of GSJPs to satisfy the given IBCs and DBCs (see Section 3.2).
- (ii)
- (iii)
- We address the presented MTVO-TFDE using the proposed GSJPs and their constructed OMs in conjunction with the SCM (see Section 6).
- (iv)
- We present a study of convergence and error analysis for the numerical solution obtained through the proposed scheme (see Section 7).
2. Basic Definition of Caputo VOFDs
3. An Overview of the Shifted JPs and Their Generalized Ones
3.1. An Overview of the Shifted JPs
- The power form representations of are as follows:where
- Alternatively, the expressions for and in relation to have the forms:where
3.2. Introducing GSJPs
4. Two OMs for Ods and VOFDs of
5. Two OMs for Ods and VOFDs of
6. Numerical Handling for MTVO-TFDWEs Subject to IBCs (2) or DBCs (3)
6.1. Homogeneous IBCs and DBCs
6.2. Non-Homogeneous IBCs and DBCs
- In the Case of IBCs:
- In the Case of DBCs:
| Algorithm 1 GSJCOPMM algorithm to solve (1) subject to IBCs. | |
| Stage 1. | Given and . |
| Stage 2. | Define the basis and , the matrices , , and calculate the elements of matrices , , and . |
| Stage 3. | Calculate the matrices: 1. , 2. , 3. 4. , 5. |
| Stage 4. | Define as in Equation (67). |
| Stage 5. | List , defined in Equation (68). |
| Stage 6. | Use Mathematica’s built-in numerical solver to solve the system obtained in [Output 5]. |
| Stage 6. | Calculate defined in Equation (62) (Homogeneous IBCs). |
| Stage 7. | Calculate and defined in Equation (75) (Non-homogeneous IBCs). |
| Algorithm 2 GSJCOPMM algorithm to solve (1) subject to DBCs. | |
| Stage 1. | Given and . |
| Stage 2. | Define the basis , the matrices , and calculate the elements of matrices , , and . |
| Stage 3. | Calculate the matrices: 1. , 2. , 3. 4. , 5. |
| Stage 4. | Define as in Equation (67). |
| Stage 5. | List , defined in Equation (68). |
| Stage 6. | Use Mathematica’s built-in numerical solver to solve the system obtained in [Output 5]. |
| Stage 6. | Calculate defined in Equation (62) (Homogeneous DBCs). |
| Stage 7. | Calculate and defined in Equation (75) (Non-homogeneous DBCs). |
7. Convergence and Error Analysis
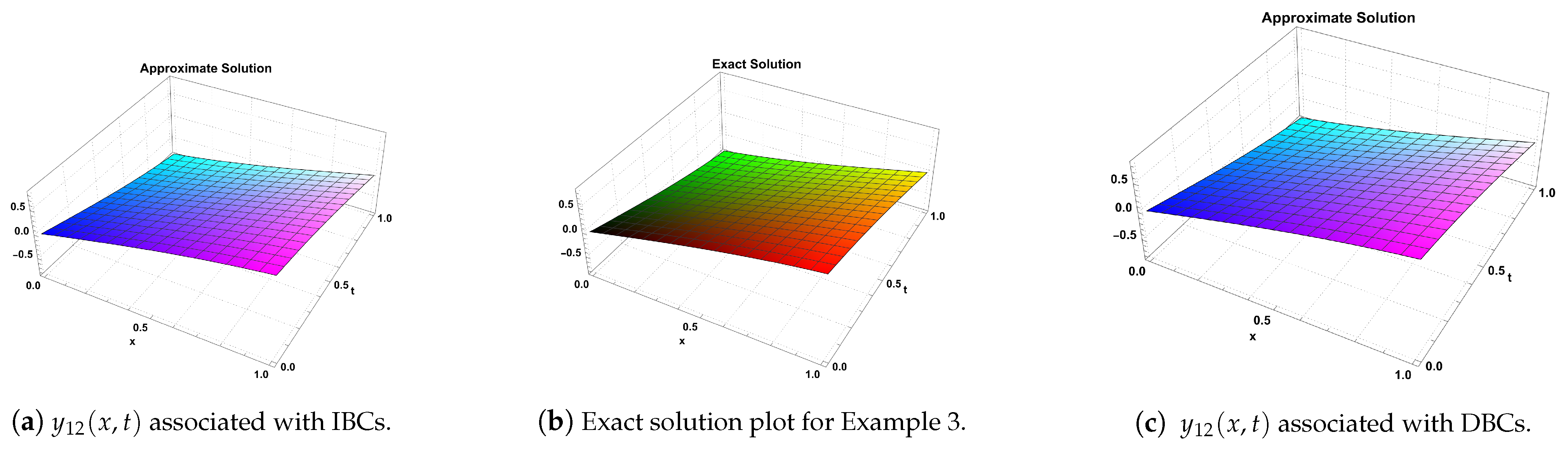
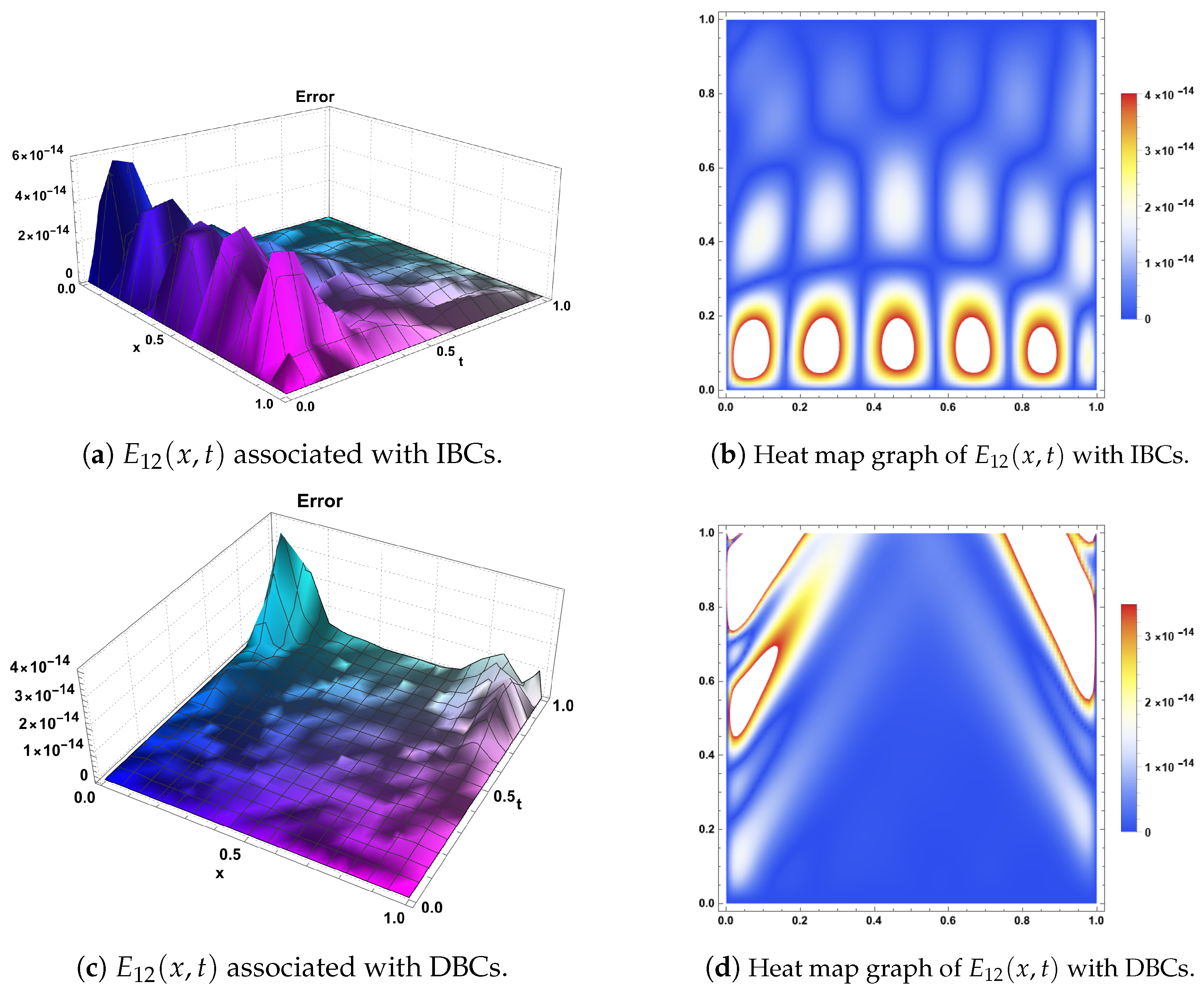
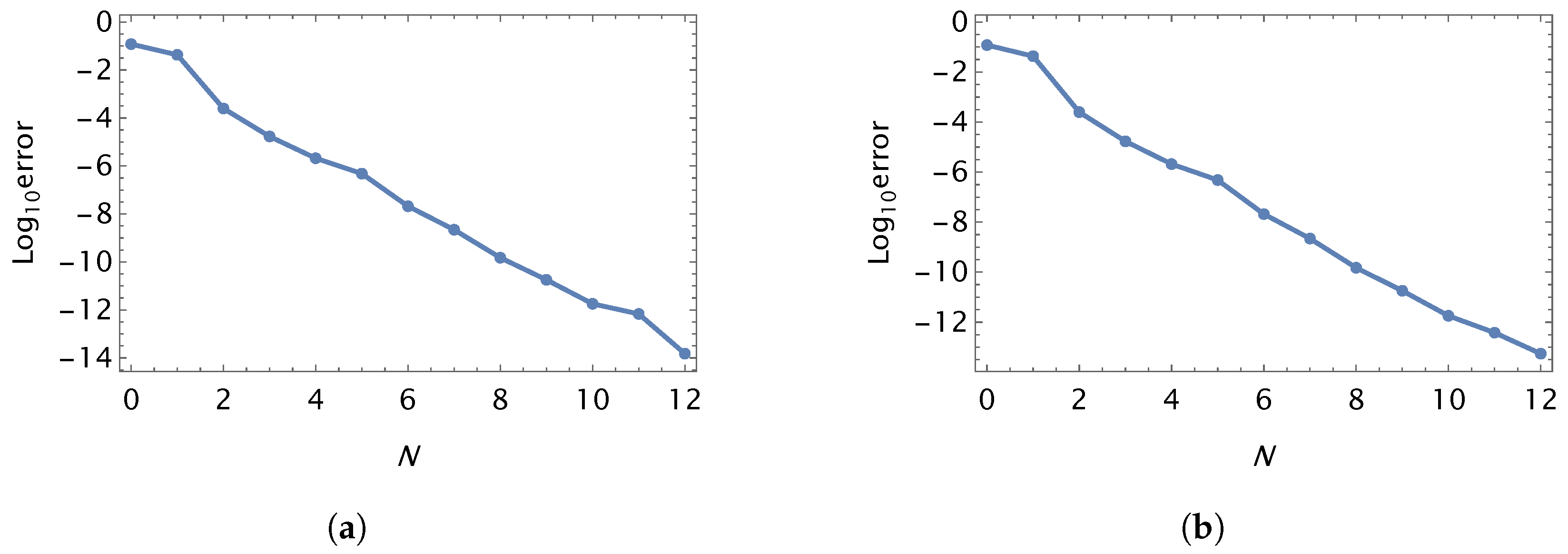
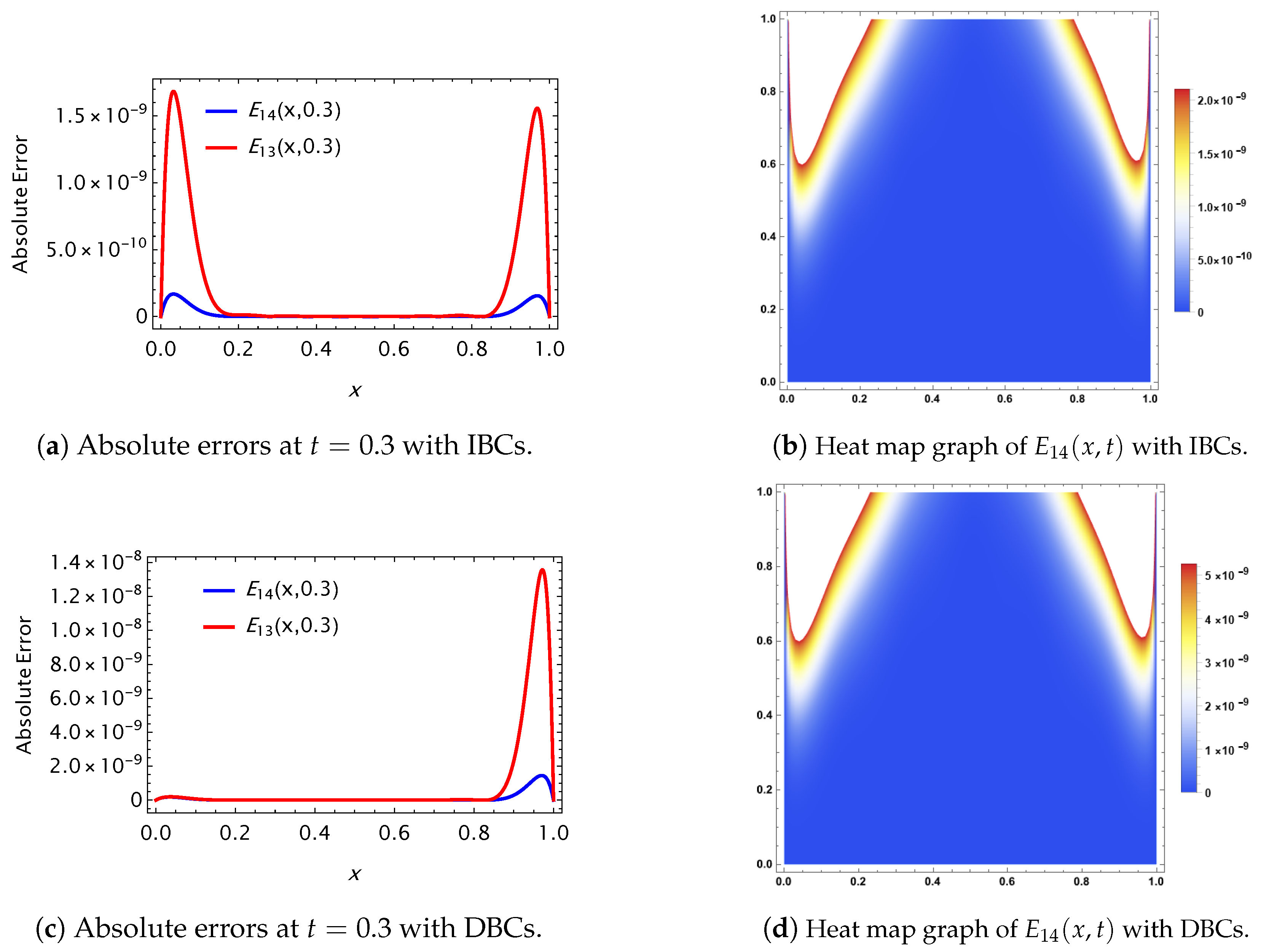
8. Numerical Simulations
9. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Description |
| DEs | Differential equations |
| FDEs | Fractional differential equations |
| VOFDEs | Variable-order fractional differential equations |
| MTVO | Multi-term variable-order |
| TFDWEs | Time-fractional diffusion-wave equations |
| MTVO-TFDWEs | Multi-term variable-order time-fractional diffusion-wave equations |
| IBCs | Initial boundary conditions |
| DBCs | Dirichlet boundary conditions |
| OMs | Operational matrices |
| Ods | Ordinary derivatives |
| VOFDs | Variable-order fractional derivatives |
| SCM | Spectral collocation method |
| VOFC | Variable-order fractional calculus |
| JPs | Jacobi polynomials |
| GSJPs | Generalized shifted Jacobi polynomials |
| GSJCOPMM | Generalized shifted Jacobi collocation operational matrix method |
| BPA | Best possible approximation |
| MAE | Maximum absolute error |
References
- Maayah, B.; Arqub, O.A.; Alnabulsi, S.; Alsulami, H. Numerical solutions and geometric attractors of a fractional model of the cancer-immune based on the Atangana–Baleanu–Caputo derivative and the reproducing kernel scheme. Chinese J. Phys. 2022, 80, 463–483. [Google Scholar] [CrossRef]
- Berredjem, N.; Maayah, B.; Arqub, O.A. A numerical method for solving conformable fractional integrodifferential systems of second-order, two-points periodic boundary conditions. Alex. Eng. J. 2022, 61, 5699–5711. [Google Scholar] [CrossRef]
- Arqub, O.A.; Rabah, A.B.; Momani, S. A spline construction scheme for numerically solving fractional Bagley–Torvik and Painlevé models correlating initial value problems concerning the Caputo–Fabrizio derivative approach. Int. J. Mod. Phys. C 2023, 34, 2350115. [Google Scholar] [CrossRef]
- Almeida, R.; Tavares, D.; Torres, D.F.M. The Variable-Order Fractional Calculus of Variations; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College Press: London, UK, 2010. [Google Scholar]
- Samko, S.G.; Ross, B. Integration and differentiation to a variable fractional order. Integr. Transf. Spec. Funct. 1993, 1, 277–300. [Google Scholar] [CrossRef]
- Odzijewicz, T.; Malinowska, A.B.; Torres, D.F.M. Noether’s theorem for fractional variational problems of variable order. Cent. Eur. J. Phys. 2013, 11, 691–701. [Google Scholar] [CrossRef]
- Chen, S.; Liu, F.; Burrage, K. Numerical simulation of a new two-dimensional variable-order fractional percolation equation in non-homogeneous porous media. Comput. Math. Appl. 2014, 67, 1673–1681. [Google Scholar] [CrossRef]
- Coimbra, C.F.M.; Soon, C.M.; Kobayashi, M.H. The variable viscoelasticity operator. Ann. Phys. 2005, 14, 378–389. [Google Scholar]
- Odzijewicz, T.; Malinowska, A.B.; Torres, D.F.M. Fractional variational calculus of variable order. In Advances in Harmonic Analysis and Operator Theory: Advances and Applications; Almeida, A., Castro, L., Speck, F.O., Eds.; Birkhäuser: Basel, Switzerland, 2013; Volume 229, pp. 291–301. [Google Scholar]
- Ostalczyk, P.W.; Duch, P.; Brzeziński, D.W.; Sankowski, D. Order functions selection in the variable-fractional-order PID controller. Advances in Modelling and Control of Non-integer-Order Systems. Lect. Notes Electr. Eng. 2015, 320, 159–170. [Google Scholar]
- Rapaić, M.R.; Pisano, A. Variable-order fractional operators for adaptive order and parameter estimation. IEEE Trans. Autom. Contr. 2013, 59, 798–803. [Google Scholar] [CrossRef]
- Izadi, M.; Yüzbasi, S.; Adel, W. Two novel Bessel matrix techniques to solve the squeezing flow problem between infinite parallel plates. Comput. Math. Math. Phy. 2021, 61, 2034–2053. [Google Scholar] [CrossRef]
- Coimbra, C.F.M. Mechanics with variable-order differential operators. AdP 2003, 515, 692–703. [Google Scholar] [CrossRef]
- Lin, R.; Liu, F.; Anh, V.; Turner, I. Stability and convergence of a new explicit finite-difference approximation for the variable-order nonlinear fractional diffusion equation. Appl. Math. Comput. 2009, 212, 435–445. [Google Scholar] [CrossRef]
- Birajdar, G.A.; Rashidi, M.M. Finite Difference Schemes for Variable Order Time-Fractional First Initial Boundary Value Problems. Appl. Appl. Math. 2017, 12, 112–135. [Google Scholar]
- Patnaik, S.; Semperlotti, F. Variable-order particle dynamics: Formulation and application to the simulation of edge dislocations. Philos. Trans. R. Soc. A 2020, 378, 0190290. [Google Scholar] [CrossRef] [PubMed]
- Blaszczyk, T.; Bekus, K.; Szajek, K.; Sumelka, W. Approximation and application of the Riesz-caputo fractional derivative of variable order with fixed memory. Meccanica 2022, 57, 861–870. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Ahmed, H.M. Spectral solutions for the time-fractional heat differential equation through a novel unified sequence of Chebyshev polynomials. AIMS Math. 2024, 9, 2137–2166. [Google Scholar] [CrossRef]
- Paola, M.D.; Alotta, G.; Burlon, A.; Failla, G. A novel approach to nonlinear variable-order fractional viscoelasticity. Philos. Trans. R. Soc. A 2020, 378, 20190296. [Google Scholar] [CrossRef] [PubMed]
- Burlon, A.; Alotta, G.; Paola, M.D.; Failla, G. An original perspective on variable-order fractional operators for viscoelastic materials. Meccanica 2021, 56, 769–784. [Google Scholar] [CrossRef]
- Ahmed, H.M. A new first finite class of classical orthogonal polynomials operational matrices: An application for solving fractional differential equations. Contemp. Math. 2023, 4, 974–994. [Google Scholar] [CrossRef]
- Napoli, A.; Abd-Elhameed, W.M. An innovative harmonic numbers operational matrix method for solving initial value problems. Calcolo 2017, 54, 57–76. [Google Scholar] [CrossRef]
- Izadi, M.; Yüzbasi, S.; Adel, W. A new Chelyshkov matrix method to solve linear and nonlinear fractional delay differential equations with error analysis. Math. Sci. 2023, 17, 267–284. [Google Scholar] [CrossRef]
- Izadi, M.; Sene, N.; Adel, W.; El-Mesady, A. The Layla and Majnun mathematical model of fractional order: Stability analysis and numerical study. Results Phys. 2023, 51, 106650. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.; Wu, L. An operational matrix of fractional differentiation of the second kind of Chebyshev polynomial for solving multiterm variable order fractional differential equation. Math. Probl. Eng. 2016, 2016, 7126080. [Google Scholar] [CrossRef]
- Youssri, Y.H.; Abd-Elhameed, W.M.; Ahmed, H.M. New fractional derivative expression of the shifted third-kind Chebyshev polynomials: Application to a type of nonlinear fractional pantograph differential equations. J. Funct. Spaces 2022, 2022, 3966135. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Alkenedri, A.M. New formulas for the repeated integrals of some Jacobi polynomials: Spectral solutions of even-order boundary value problems. Int. J. Appl. Comput. Math. 2021, 7, 166. [Google Scholar] [CrossRef]
- Sheikhi, S.; Matinfar, M.; Firoozjaee, M.A. Numerical solution of variable-order differential equations via the Ritz-approximation method by shifted Legendre polynomials. Int. J. Appl. Comput. Math. 2021, 7, 22. [Google Scholar] [CrossRef]
- El-Sayed, A.A.; Baleanu, D.; Agarwal, P. A novel Jacobi operational matrix for numerical solution of multi-term variable-order fractional differential equations. J. Taibah Univ. Sci. 2020, 14, 963–974. [Google Scholar] [CrossRef]
- Nagy, A.M.; Sweilam, N.H.; El-Sayed, A.A. New operational matrix for solving multiterm variable order fractional differential equations. J. Comp. Nonlinear Dyn. 2018, 13, 011001–011007. [Google Scholar] [CrossRef]
- El-Sayed, A.A.; Agarwal, P. Numerical solution of multiterm variable-order fractional differential equations via shifted Legendre polynomials. Math. Meth. Appl. Sci. 2019, 42, 3978–3991. [Google Scholar] [CrossRef]
- Wang, L.F.; Ma, Y.P.; Yang, Y.Q. Legendre polynomials method for solving a class of variable order fractional differential equation. CMES-Comp. Model. Eng. 2014, 101, 97–111. [Google Scholar]
- Chen, Y.M.; Wei, Y.Q.; Liu, D.Y.; Yu, H. Numerical solution for a class of nonlinear variable order fractional differential equations with Legendre wavelets. Appl. Math. Lett. 2015, 46, 83–88. [Google Scholar] [CrossRef]
- Bushnaq, S.; Shah, K.; Tahir, S.; Ansari, K.J.; Sarwar, M.; Abdeljawad, T. Computation of numerical solutions to variable order fractional differential equations by using non-orthogonal basis. AIMS Math. 2022, 7, 10917–10938. [Google Scholar] [CrossRef]
- Chen, Y.M.; Liu, L.Q.; Li, B.F.; Sun, Y. Numerical solution for the variable order linear cable equation with Bernstein polynomials. Appl. Math. Comput. 2014, 238, 329–341. [Google Scholar] [CrossRef]
- Shen, S.; Liu, F.; Chen, J.; Turner, I.; Anh, V. Numerical techniques for the variable order time fractional diffusion equation. Appl. Math. and Comput. 2012, 218, 10861–10870. [Google Scholar] [CrossRef]
- Moghaddam, B.P.; Machado, J.A.T. Extended algorithms for approximating variable order fractional derivatives with applications. J. Sci. Comput. 2017, 71, 1351–1374. [Google Scholar] [CrossRef]
- Ahmed, H.M. Enhanced shifted Jacobi operational matrices of derivatives: Spectral algorithm for solving multiterm variable-order fractional differential equations. Bound. Value Probl. 2023, 2023, 108. [Google Scholar] [CrossRef]
- Shen, J.; Tang, T.; Wang, L. Spectral Methods: Algorithms, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2011; Volume 41. [Google Scholar]
- Abd-Elhameed, W.M.; Ahmed, H.M.; Youssri, Y.H. A new generalized Jacobi Galerkin operational matrix of derivatives: Two algorithms for solving fourth-order boundary value problems. Adv. Differ. Equ. 2016, 2016, 22. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Ahmed, H.M. Tau and Galerkin operational matrices of derivatives for treating singular and Emden-Fowler third-order-type equations. Int. J. Mod. Phys. C 2022, 33, 2250061. [Google Scholar] [CrossRef]
- Heydari, M.H.; Hooshmandasl, M.R.; Ghaini, F.M.M.; Cattani, C. Wavelets method for the time fractional diffusion-wave equation. Phys. Lett. A 2015, 379, 71–76. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, F.; Turner, I.; Burrage, K. Analytical solutions for the multi-term time-fractional diffusion-wave/diffusion equations in a finite domain. Comput. Math. Appl. 2012, 64, 3377–3388. [Google Scholar] [CrossRef]
- Nigmatullin, R.R. To the theoretical explanation of the universal response. Phys. Status Solidi (B) Basic Res. 1984, 123, 739–745. [Google Scholar] [CrossRef]
- Nigmatullin, R.R. Realization of the generalized transfer equation in a medium with fractal geometry, phys. status solidi, b basic res. Phys. Status Solidi (B) Basic Res. 1986, 133, 425–430. [Google Scholar] [CrossRef]
- Luchko, Y. Initial-boundary-value problems for the generalized multi-term time-fractional diffusion equation. J. Math. Anal. Appl. 2011, 374, 538–548. [Google Scholar] [CrossRef]
- Liu, Y.; Yamamoto, M. Uniqueness of orders and parameters in multi-term time-fractional diffusion equations by short-time behavior. Inverse Probl. 2022, 39, 024003. [Google Scholar] [CrossRef]
- Cheng, J.; Nakagawa, J.; Yamamoto, M.; Yamazaki, T. Uniqueness in an inverse problem for a one dimensional fractional diffusion equation. Inverse Probl. 2009, 25, 115002. [Google Scholar] [CrossRef]
- Szegö, G. Orthogonal Polynomials, 4th ed.; American Mathematical Soc.: Providence, RI, USA, 1975; Volume XXIII. [Google Scholar]
- Luke, Y.L. Mathematical Functions and Their Approximations; Academic Press: London, UK, 1975. [Google Scholar]
- Prudnikov, A.P.; Brychkov, Y.A.; Marichev, O.I. More Special Functions; Integrals and Series; Gordon and Breach: New York, NY, USA, 1990; Volume 3. [Google Scholar]
- Narumi, S. Some formulas in the theory of interpolation of many independent variables. Tohoku Math. J. 1920, 18, 309–321. [Google Scholar]
- Jeffrey, A.; Dai, H.H. Handbook of Mathematical Formulas and Integrals, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Heydari, M.H.; Avazzadeh, Z.; Haromi, M.F. A wavelet approach for solving multi-term variable-order time fractional diffusion-wave equation. Appl. Math. Comput. 2019, 341, 215–228. [Google Scholar] [CrossRef]
- Sadri, K.; Aminikhah, H. A new efficient algorithm based on fifth-kind Chebyshev polynomials for solving multi-term variable-order time-fractional diffusion-wave equation. Int. J. Comput. Math. 2022, 99, 966–992. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IBCs/DBCs | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | IBCs | 1.3 × | 2.3 × | 1.9 × | 2.4 × | 2.7 × | 2.4 × |
| DBCs | 2.6 × | 3.4 × | 3.5 × | 3.9 × | 3.6 × | 1.6 × | ||
| CPU time | 0.231 | 0.312 | 0.401 | 0.421 | 0.451 | 0.515 | ||
| 1/2 | 1/2 | IBCs | 2.4 × | 1.3 × | 4.1 × | 7.2 × | 1.8 × | 2.5 × |
| DBCs | 2.7 × | 3.6 × | 3.8 × | 3.9 × | 4.4 × | 2.7 × | ||
| CPU time | 0.232 | 0.313 | 0.403 | 0.422 | 0.453 | 0.517 | ||
| −1/2 | −1/2 | IBCs | 1.5 × | 2.8 × | 4.8 × | 1.2 × | 1.8 × | 2.6 × |
| DBCs | 1.6 × | 3.6 × | 1.9 × | 1.9 × | 5.4 × | 2.1 × | ||
| CPU time | 0.221 | 0.310 | 0.402 | 0.422 | 0.450 | 0.517 | ||
| 1 | 0 | IBCs | 3.3 × | 4.3 × | 3.7 × | 2.2 × | 1.8 × | 3.1 × |
| DBCs | 3.9 × | 3.6 × | 2.1 × | 1.9 × | 2.6 × | 2.2 × | ||
| CPU time | 0.233 | 0.314 | 0.407 | 0.425 | 0.458 | 0.519 | ||
| 0 | 1 | IBCs | 4.3 × | 2.3 × | 4.5 × | 4.4 × | 1.7 × | 2.9 × |
| DBCs | 2.9 × | 3.2 × | 2.5 × | 3.8 × | 8.6 × | 2.3 × | ||
| CPU time | 0.234 | 0.315 | 0.407 | 0.426 | 0.451 | 0.519 |
| IBCs/DBCs | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | IBCs | 1.2 × | 4.3 × | 2.9 × | 5.8 × | 1.5 × | 5.5 × |
| DBCs | 1.0 × | 1.1 × | 6.1 × | 4.0 × | 1.2 × | 4.5 × | ||
| CPU time | 0.101 | 0.122 | 0.232 | 0.432 | 0.521 | 0.735 | ||
| 1/2 | 1/2 | IBCs | 1.3 × | 4.4 × | 2.8 × | 5.4 × | 1.2 × | 5.4 × |
| DBCs | 1.1 × | 1.1 × | 5.9 × | 4.2 × | 1.4 × | 4.0 × | ||
| CPU time | 0.102 | 0.123 | 0.234 | 0.433 | 0.525 | 0.745 | ||
| −1/2 | −1/2 | IBCs | 1.4 × | 3.3 × | 2.1 × | 4.9 × | 1.3 × | 5.7 × |
| DBCs | 1.2 × | 1.3 × | 5.2 × | 3.9 × | 1.5 × | 4.7 × | ||
| CPU time | 0.101 | 0.121 | 0.231 | 0.433 | 0.520 | 0.732 | ||
| 1 | 0 | IBCs | 1.5 × | 3.9 × | 3.0 × | 6.0 × | 2.5 × | 4.5 × |
| DBCs | 1.3 × | 1.4 × | 6.2 × | 3.3 × | 2.0 × | 3.5 × | ||
| CPU time | 0.104 | 0.124 | 0.234 | 0.435 | 0.521 | 0.738 | ||
| 0 | 1 | IBCs | 1.7 × | 4.5 × | 2.7 × | 5.1 × | 1.3 × | 5.5 × |
| DBCs | 1.7 × | 1.6 × | 6.5 × | 4.5 × | 1.8 × | 4.1 × | ||
| CPU time | 0.102 | 0.125 | 0.237 | 0.438 | 0.529 | 0.741 |
| IBCs/DBCs | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | IBCs | 1.4 × | 3.3 × | 2.2 × | 4.8 × | 2.5 × | 4.4 × |
| DBCs | 1.2 × | 2.1 × | 1.1 × | 3.2 × | 2.3 × | 6.8 × | ||
| CPU time | 0.231 | 0.401 | 0.451 | 0.521 | 0.601 | 0.735 | ||
| 1/2 | 1/2 | IBCs | 1.0 × | 2.1 × | 2.4 × | 4.4 × | 2.2 × | 5.4 × |
| DBCs | 1.3 × | 2.1 × | 4.9 × | 4.3 × | 2.1 × | 4.2 × | ||
| CPU time | 0.233 | 0.405 | 0.454 | 0.525 | 0.607 | 0.740 | ||
| −1/2 | −1/2 | IBCs | 1.5 × | 2.4 × | 2.3 × | 2.4 × | 1.4 × | 5.7 × |
| DBCs | 1.1 × | 1.5 × | 4.2 × | 2.9 × | 3.5 × | 2.2 × | ||
| CPU time | 0.240 | 0.410 | 0.459 | 0.528 | 0.610 | 0.740 | ||
| 1 | 0 | IBCs | 1.2 × | 2.3 × | 3.1 × | 5.0 × | 3.5 × | 8.2 × |
| DBCs | 1.3 × | 2.5 × | 5.2 × | 4.3 × | 3.0 × | 6.5 × | ||
| CPU time | 0.238 | 0.409 | 0.458 | 0.529 | 0.608 | 0.739 | ||
| 0 | 1 | IBCs | 1.8 × | 2.3 × | 2.4 × | 5.2 × | 2.3 × | 4.5 × |
| DBCs | 1.7 × | 2.5 × | 5.5 × | 3.5 × | 2.8 × | 6.1 × | ||
| CPU time | 0.237 | 0.407 | 0.456 | 0.527 | 0.608 | 0.738 |
| IBCs/DBCs | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | IBCs | 1.2 × | 2.3 × | 2.0 × | 3.8 × | 2.1 × | 4.5 × |
| DBCs | 1.1 × | 3.3 × | 2.2 × | 4.8 × | 3.1 × | 2.2 × | ||
| CPU time | 0.235 | 0.402 | 0.454 | 0.522 | 0.604 | 0.988 | ||
| 3/2 | 1/2 | IBCs | 1.3 × | 4.3 × | 5.0 × | 3.7 × | 2.6 × | 4.4 × |
| DBCs | 2.2 × | 3.1 × | 2.4 × | 3.5 × | 2.7 × | 4.4 × | ||
| CPU time | 0.230 | 0.317 | 0.411 | 0.430 | 0.460 | 0.980 | ||
| 1/2 | 3/2 | IBCs | 2.2 × | 4.3 × | 3.0 × | 3.9 × | 2.3 × | 4.6 × |
| DBCs | 4.2 × | 3.2 × | 1.5 × | 5.8 × | 2.9 × | 4.4 × | ||
| CPU time | 0.234 | 0.319 | 0.412 | 0.429 | 0.459 | 0.991 | ||
| 2 | 3 | IBCs | 3.2 × | 4.3 × | 1.0 × | 1.8 × | 2.2 × | 4.6 × |
| DBCs | 5.2 × | 3.4 × | 2.3 × | 3.6 × | 2.0 × | 6.1 × | ||
| CPU time | 0.239 | 0.320 | 0.413 | 0.430 | 0.461 | 1.001 | ||
| 3 | 2 | IBCs | 1.7 × | 2.8 × | 2.5 × | 2.8 × | 2.4 × | 4.7 × |
| DBCs | 2.3 × | 4.3 × | 2.5 × | 3.9 × | 2.8 × | 4.6 × | ||
| CPU time | 0.238 | 0.319 | 0.412 | 0.428 | 0.458 | 0.998 |
| (IBCs) | (DBCs) | [57] (IBCs) | [58] (DBCs) | |
|---|---|---|---|---|
| (0.1, 0.1) | 1.47 × | 3.15 × | 3.05 × | 1.69 × |
| (0.2, 0.2) | 4.34 × | 1.09 × | 8.35 × | 1.12 × |
| (0.3, 0.3) | 2.55 × | 4.39 × | 2.35 × | 1.97 × |
| (0.4, 0.4) | 5.41 × | 1.48 × | 5.40 × | 1.33 × |
| (0.5, 0.5) | 2.08 × | 8.08 × | 6.60 × | 1.38 × |
| (0.6, 0.6) | 4.88 × | 3.43 × | 1.53 × | 1.36 × |
| (0.7, 0.7) | 4.78 × | 2.28 × | 3.73 × | 1.04 × |
| (0.8, 0.8) | 8.71 × | 1.70 × | 1.06 × | 1.90 × |
| (0.9, 0.9) | 5.22 × | 3.71 × | 6.65 × | 4.68 × |
| [58] | [57] | [57] | |||
|---|---|---|---|---|---|
| (0.1, 0.1) | 1.39 × | 1.1 × | 1.29 × | 5.62 × | 1.04 × |
| (0.2, 0.2) | 3.66 × | 6.2 × | 3.41 × | 1.87 × | 8.61 × |
| (0.3, 0.3) | 2.07 × | 7.5 × | 2.37 × | 1.34 × | 1.11 × |
| (0.4, 0.4) | 1.60 × | 1.6 × | 4.27 × | 3.25 × | 6.39 × |
| (0.5, 0.5) | 2.58 × | 2.6 × | 9.46 × | 2.57 × | 2.06 × |
| (0.6, 0.6) | 4.64 × | 3.3 × | 1.14 × | 1.66 × | 5.52 × |
| (0.7, 0.7) | 2.07 × | 4.6 × | 3.26 × | 8.95 × | 3.11 × |
| (0.8, 0.8) | 2.39 × | 1.7 × | 1.93 × | 3.78 × | 8.14 × |
| (0.9, 0.9) | 3.60 × | 1.2 × | 1.32 × | 3.34 × | 1.89 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, H.M. New Generalized Jacobi Galerkin Operational Matrices of Derivatives: An Algorithm for Solving Multi-Term Variable-Order Time-Fractional Diffusion-Wave Equations. Fractal Fract. 2024, 8, 68. https://doi.org/10.3390/fractalfract8010068
Ahmed HM. New Generalized Jacobi Galerkin Operational Matrices of Derivatives: An Algorithm for Solving Multi-Term Variable-Order Time-Fractional Diffusion-Wave Equations. Fractal and Fractional. 2024; 8(1):68. https://doi.org/10.3390/fractalfract8010068
Chicago/Turabian StyleAhmed, Hany Mostafa. 2024. "New Generalized Jacobi Galerkin Operational Matrices of Derivatives: An Algorithm for Solving Multi-Term Variable-Order Time-Fractional Diffusion-Wave Equations" Fractal and Fractional 8, no. 1: 68. https://doi.org/10.3390/fractalfract8010068
APA StyleAhmed, H. M. (2024). New Generalized Jacobi Galerkin Operational Matrices of Derivatives: An Algorithm for Solving Multi-Term Variable-Order Time-Fractional Diffusion-Wave Equations. Fractal and Fractional, 8(1), 68. https://doi.org/10.3390/fractalfract8010068