1. Introduction
Digital images are often affected by various external physical conditions during the processes of storage, transmission, and transformation, resulting in quality degradation, which not only affects the visualization of images, but also causes difficulties in the subsequent processing and application of the image. Therefore, image denoising has always been a hot research topic in image processing [
1]. Noise in images can be roughly divided into two categories: additive noise and multiplicative noise. In the past few decades, research on removing additive noise has been extensive and mature. Unlike additive noise, multiplicative noise, which commonly appears in SAR images, laser images, ultrasound images, and positron emission tomography (PET), is signal independent, non-Gaussian, and spatially dependent [
2,
3,
4,
5]. One of the most important tasks for this image denoising problem is that details such as edges and textures should be efficiently kept while restoring the degraded image. Since this course lacks some prior information, it is a classic ill-posed problem. In this problem, we are interested in degraded image
arising from original images
u by corruption with (uncorrelated) multiplicative noise
of mean 1, i.e.,
Here,
follows a Gamma distribution and the probability density function (PDF) of Gamma noise is
where
is Gamma function,
is scale parameter, and
K is shape parameter. Furthermore, the mean of
is
and the variance of
is
. In general, we assume that the mean of
is equal to 1, then we obtain
and its variance of
. The objective of image denoising is to find the unknown true image
u from a degraded image
f.
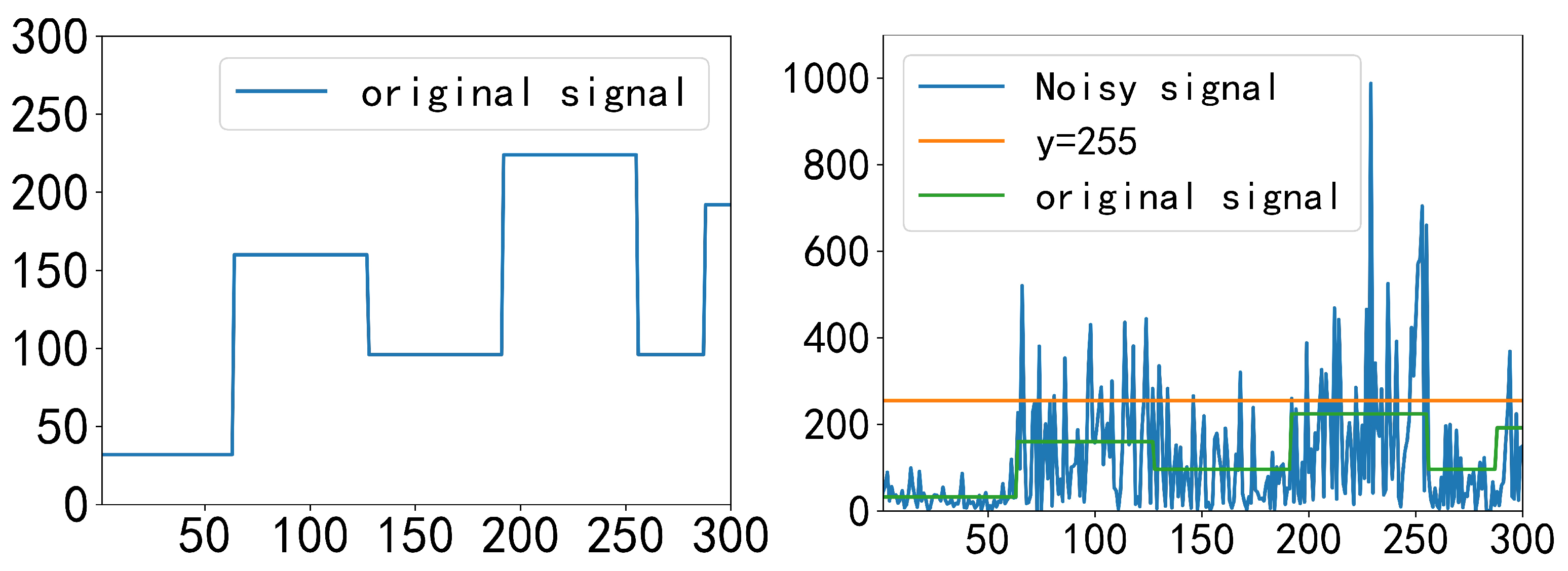
In order to investigate the effect of degradation, we discriminate differences in the strength of one-dimensional Gamma noise in
Figure 1. For optical images, it shows that the intensity value of the degraded signal usually has a higher intensity range compared to the original signal. Unlike the imaging acquisition processes of optical images, the pixel range of SAR images is usually much larger [
6]. Specifically, SAR image data are highly accurate and usually have a bit depth of 16 bits, 24 bits, or higher [
7]. However, the existing multiplicative denoising models often use a truncation function in the denoising process to fix the pixel values of the image in a certain fixed range, which is obviously not suitable for the denoising process of SAR images. Traditional linear histogram rescaling is a good choice for image visualization; however, this simple linear shrinkage can cause significant information loss due to the long distribution tails and the associated concentration on low raw values [
8]. To overcome these shortcomings, researchers have proposed more innovative SAR image dynamic range compression algorithms, such as image compression algorithms based on hierarchical image fusion and image compression algorithms based on nonlinear transformation [
9,
10]. These algorithms have solved the problems of linear dynamic range compression algorithms to a certain extent, but they still have the defects of detail loss and poor adaptive processing ability [
11]. Since existing models usually use a truncation function to map the intensity values of the recovered images to
during denoising, this will reduce the purity of the edge/texture information in the SAR images [
12,
13]. Therefore, the variation of intensity range should also be taken into account when denoising multiplicative noise.
To remove multiplicative noise from SAR images, many multiplicative denoising models have been proposed, among which the variational models based on total variation (TV) regularization have achieved impressive results, as the space of total variation exhibits jump discontinuities [
12,
13,
14,
15]. In 2008, the AA model was designed to solve the degradation model
, the process of image reconstruction was formulated into the maximum a posteriori (MAP) framework [
12]. With MAP estimator, the model for restoring images corrupted with Gamma noise was proposed as
where
f is the corrupted image and
stands for the total variation of
u. The fidelity term
is strictly convex for
. The parameter
is used to balance the influence of these two terms. Although the optimization problem is nonconvex, Aubert and Aujol showed the existence of minimizers of the optimization problem under certain conditions. For the reason that the AA model is nonconvex, the methods mentioned may stick at some local minimizers. To overcome these problems, Shi and Osher [
16] transformed the multiplicative denoising problem into an additive denoising problem by considering a noisy observation given by
, then they turn the denoising model into a convex model by adopting the fidelity term. In [
13], Dong and Zeng added a penalty term
to the AA model by virtue of the statistical properties of the multiplicative Gamma noise; the model is as follow:
which is global convex when the equilibrium parameters meet certain conditions. However, the variational models based on total variation (TV) regularization often yield the staircase effects and the loss of image contrasts [
17].
To overcome the weakness of variational models based on the TV model, nonlinear diffusion equation methods were also widely studied. Two types of nonlinear diffusion equation methods have been proposed in the literature. The first type introduces the nonlinear diffusion equation of its integer order; for example, the speckle-reducing anisotropic diffusion (SRAD) models [
18,
19] were proposed by modifying the diffusion coefficients to deal with various noise distributions. In 2015, Zhou et al. proposed a nonlinear diffusion filter denoising framework which was named the DD model [
20]. They considered not only the information of the gradient of the image, but also the information of gray levels of the image; the diffusion model is shown as follow:
where the parameter
balances the fidelity term and the regularization term. In this model, a particular case was chosen under the framework of the diffusion equation, i.e., they took
. The coefficient
was divided into two independent parts, where
is a function of the gray level of
u and
is a function of the gradient
. Inspired by the DD model, a gray level indicator-based nonlinear telegraph diffusion model is also presented for image despeckling, which successfully preserves the image edges during the noise removal process [
21]. The mentioned models often use information such as first-order differential operators or second-order Hessian matrices to detect image gray value changes at the discrete level using neighboring pixel points, and thus the obtained results are local in nature. Since the image texture structure is usually non-local in nature, the image texture structure obtained by existing first- or second-order denoising models is usually easily blurred.
Unlike the integer-order operator, the fractional-order differential operator is a nonlocal operator [
22,
23] which can achieve texture detection by inductively obtaining the autocorrelation of an image with different weight coefficients based on the proximity relationship between individual pixel points of the image. Therefore, the second type introduces the nonlinear diffusion equations of their fractional-order derivative, which can be seen as the generalization of the integer-order derivative. In [
24], Bai and Feng introduced a fractional-order anisotropic diffusion model to remove additive noise (BF model), which is shown as follow:
where
is the adjoint of
and
is the adjoint of
. This model can be seen as generalizations of second-order and fourth-order anisotropic diffusion equations, because (4) turned into the Perona–Malik model when
and the fourth-order anisotropic diffusion model when
. With
, the BF model exhibited higher perceptual quality than second-order and fourth-order PDEs. The diffusion equations can be seen as the Euler–Lagrange equations of an increasing energy function of the absolute value of the fractional derivative, but the energy minimization models are not studied in that way; in other words, the model lacks some theoretical analysis. In order to analyze properties of the total
-order variation, Zhang and Chen proposed a fractional-order derivative-based total
-order variation model which provides the foundation for applications in imaging inverse problems as a regularization term [
25]. Due to the strong denoising capability of the fractional-order diffusion models, fractional-order derivatives are also used in the removal of multiplicative noise. In [
26], a fractional-order nonlinear diffusion model based on adaptive anisotropic fractional diffusion equations (AAFD) was proposed to denoise the texture images corrupted by multiplicative noise; the model is as follows:
where
,
and
. By adjusting the parameter
, the fractional-order derivative performs well both in accommodating the texture details and eliminating the staircase effect.
To the best of our knowledge, most of the aforementioned work does not take into account the variation in the range of values of SAR images during denoising. In addition, we always compute a smooth solution in Sobolev spaces [
24,
26,
27]. Thus, smoothing (by local weighted averaging) is an effective image regularization method that has been used for denoising [
24]. However, SAR images should not be smoothed too much, because the studies on discriminating between SAR clutter textures are important [
28,
29]. Therefore, to better preserve image texture details, the natural space for our computational solution is
, i.e., the space of functions with bounded variation. When dealing with strong Gamma noise, a truncation function is used to confirm the intensity values to be in
. Regrettably, especially for SAR images, image structure and information would be terribly damaged with the fixed intensity range. Due to the fact that plenty of models were proposed to remove the multiplicative noise without considering the real range and information loss of the restored images, a gray value adjustment is essential in the noise removal process.
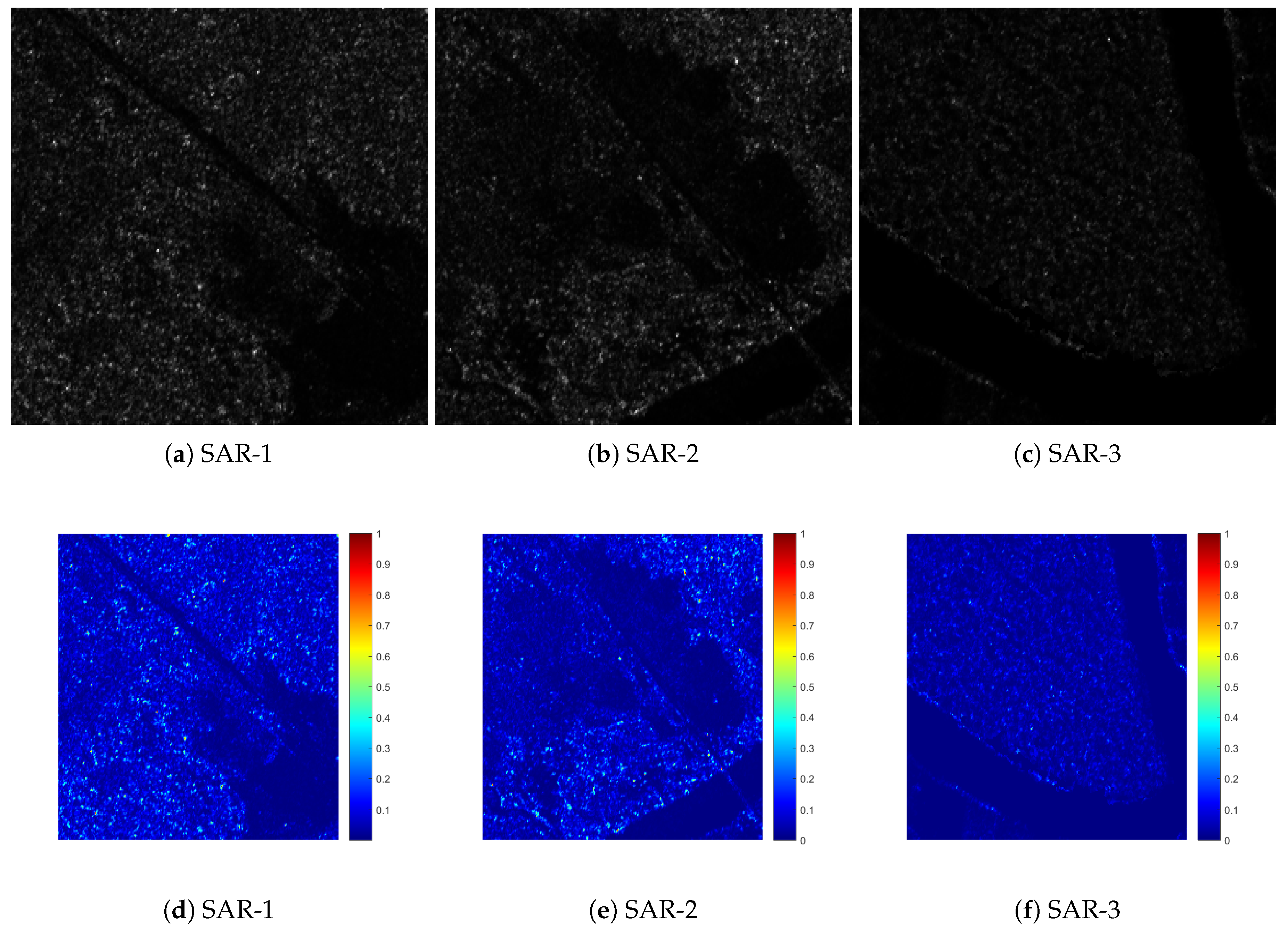
In this paper, we aim to remove multiplicative noise from three real SAR datasets in range
. Because noise-free SAR images do not exist, we cannot calculate the PSNR and MAE. To solve this problem, degraded aerial and texture images are normalized to simulate real SAR images. Then, we propose a fractional-order variational denoising enhancement model based on a nonlinear transformation that is effective in both texture enhancement and noise removal. A lot of models are built on the inverse problem
[
12,
26,
27], then the denoising result of
is obtained. However,
is unknown as the Gamma noise is random, and
usually exceeds the displayable range of a normal image. We aim to visualize the denoised result
u more effectively. Thus, we proposed a degradation model based on the nonlinear transformation to adjust the intensity of image pixel value. The fractional-order variational model proposed in this paper was built on this new degradation model. Considering the gray scale, visualizing the denoising results to the range of
by
is a suitable choice. Compared with the restored result
, a bias correction is also introduced into the proposed denoising model to overcome the accuracy problem. The existing integer-order operator uses adjacent pixel points to detect the change in image gray value in the process of numerical discretization, which is local in nature and is only applicable to dealing with local features, such as image edges, and cannot effectively deal with non-local texture features. Due to the non-locality, self-similarity, and long-range dependence property of fractional-order differential operators, an adaptive fractional-order regularization term is proposed in this paper to protect the texture features of images.
Contributions
In this paper, we introduce a new degraded model with a nonlinear transformation. Following the MAP estimator for multiplicative Gamma noise, a corresponding fidelity term is obtained. Unlike many denoising models, we focus on information preservation and detail enhancement for real SAR images or other images with high-intensity dynamic range. Inspired by this issue, a total fractional-order variation model is proposed to preserve and enhance the image textures. In this model, we do not use the truncation function to force the intensity values of restored images between 0 and 255.
- (i)
A new degraded model is proposed in order to obtain the restored result in a proper range from the normalized degraded images, then the corresponding fidelity term is introduced, which is used to enhance the restored images and show more local details.
- (ii)
We consider the framework of total fractional-order variation model with adaptive regularization term for texture image multiplicative noise removal.
- (iii)
The proposed total fractional-order variation model is nonconvex, so a good initialization will be helpful to obtain a satisfactory result. Thus, we give more flexible initialization choices by tuning magnitude characteristics and reach a compromise between sensitivity to noise and detection accuracy.
- (iv)
The noise removal model is firstly solved by the scalar auxiliary variable approach, and the obtained experimental results are satisfied.
The rest of the paper is organized as follows. In
Section 2, some related models for multiplicative noise removal are briefly described. In
Section 3, the new degraded model aiming to enhance the detail of restored images is proposed, then we introduce the fidelity term by using a maximum a posteriori (MAP) estimator. After that, we propose a total fractional-order variation model with a gray level indicator, and the properties of solutions to functional minimization are also demonstrated. In
Section 4, the scalar auxiliary variable approach is used to solve the minimization problem. In
Section 5, some numerical experiments are given to illustrate the performance of the proposed algorithm. In
Section 6, concluding remarks are given.
3. The Proposed Multiplicative Noise Removal Model with Contrast Enhancement
In this section, we introduce a new degradation model. Based on the Bayes rule, we construct the fidelity term by using a maximum a posteriori (MAP) estimator. Then, an adaptive fractional-order regularization term is proposed for the fractional-order operator, which is nonlocal and useful to preserve the texture details of the image.
3.1. New Degradation Model
Multiplicative noise distorts edge and subtle details of SAR images, and the multiplicative model
is widely accepted as a good descriptor for SAR data. However, SAR images have large dynamic intensity that is different from a natural image, and the existing speckle noise filtering approaches fail to preserve the significant information, namely to capture the edge information from noise, thereby suppressing the edges or enhancing the noise particle assumed by edges. In order to solve the problem that the dynamic range of the processed image far exceeds the capabilities of the display device, the image needs to compress the dynamic range [
30,
31], and the gray level slice is equivalent to the spatial domain of bandpass filtering. The grayscale slicing feature can emphasize a set of grayscale values and reduce all others, or it can emphasize a set of grayscale values without considering other grayscale values.
In practical application, the intensity of raw SAR data is
. Because of the strong noise, most of the normalized signal is close to the gray value 0, and it leads to construct reduction. Over the past fifty years, image enhancement methods had been developed, such as histogram equalization and fuzzy set theory [
32,
33,
34]. Histogram equalization is a nonlinear stretching that redistributes pixel values so that each value has approximately the same number of pixels within a range. The result approximates a flat histogram, then the contrast increases at the peak and decreases at the tail. However, histogram equalization does not always give satisfactory results since it might cause over-enhancement for frequent gray levels and loss of contrast for less frequent ones [
35]. Fuzzy set theory is usually applied in image segmentation [
36], and multiplicative noise makes the selection of the affiliation function more difficult. If we deal with SAR images by histogram equalization, it would enhance the strong noisy signal as well. In addition, lower contrast may lead to blurring of the image, so the uncertainty of the image information will increase accordingly.
To solve the above-mentioned problem, we introduce a nonlinear transformation function
in this paper. The enhancement operation is performed in order to modify the image brightness, contrast, or the distribution of the grey levels. Specifically, the information of the image is retained and the contrast of the pixel values is enhanced by the nonlinear transformation correction. To this end, the inverse problem of multiplicative noise can be reconstructed as
where
is continuous, concave down, and strictly increasing. If
, the inverse problem becomes the original degraded model (1).
is the normalized degraded image and
is recognized as the enhanced image. The continuous and concave down properties of the function
preserve the variation in intensity over different image regions and put an enhancement on the raw data
. If
is strictly increasing, it means that as one looks at a concave down graph from left to right, the slopes of the tangent lines will be decreasing. Thus, the assumption of the concave down function strengthens the raw data, especially when the raw data are small.
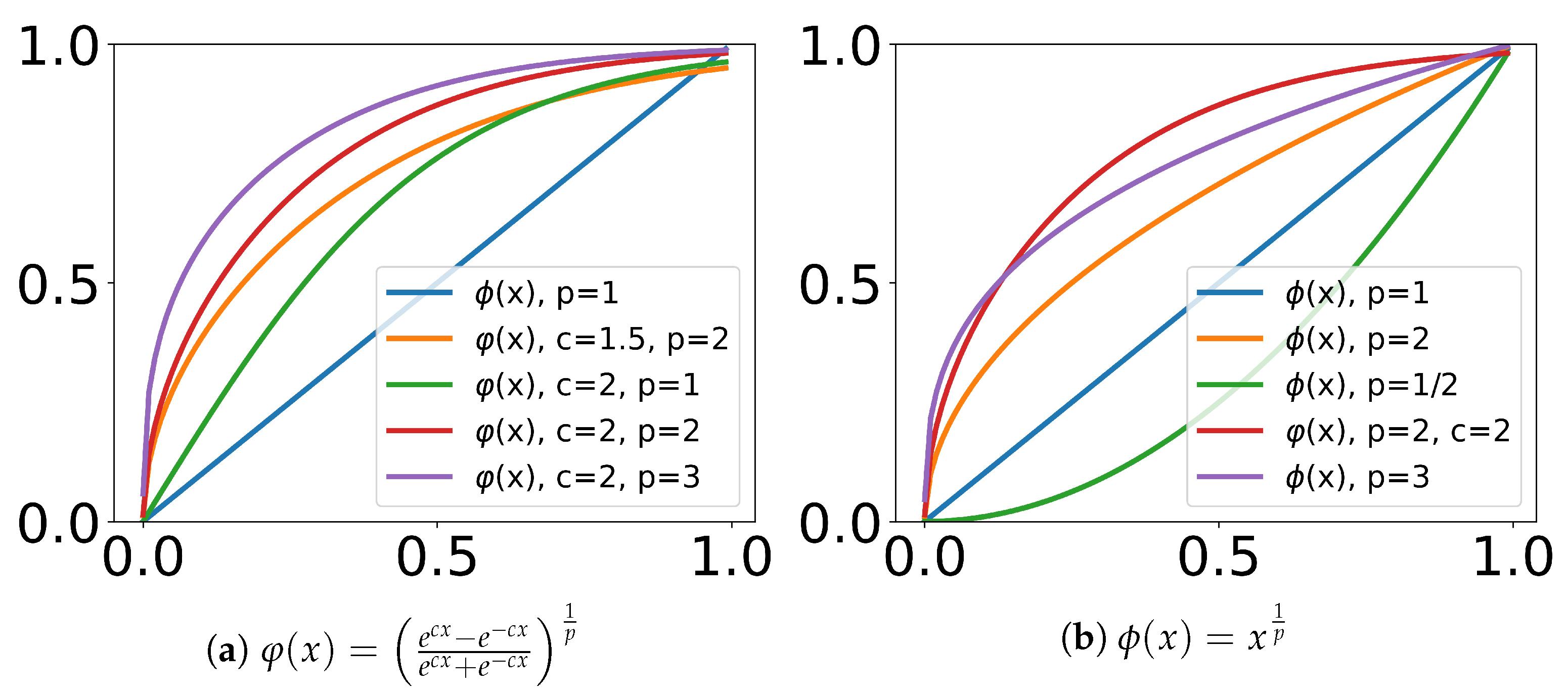
As can be seen from
Figure 2b, Gamma correction gives a greater degree of enhancement when the pixel values are small. Then, two problems typically arise with Gamma correction: not enough correction and too much correction. Over-correction (in addition to making mid-tones too light) shifts colors towards neutral grey, while under-correction (in addition to making mid-tones too dark) shifts colors towards the display primaries. Unlike Gamma correction, the nonlinear transform can take into account different regions of the image by adjusting the values of the parameters
c and
p to give a suitable image enhancement result. The higher the values of the parameters, the steeper the transformation curve becomes; see
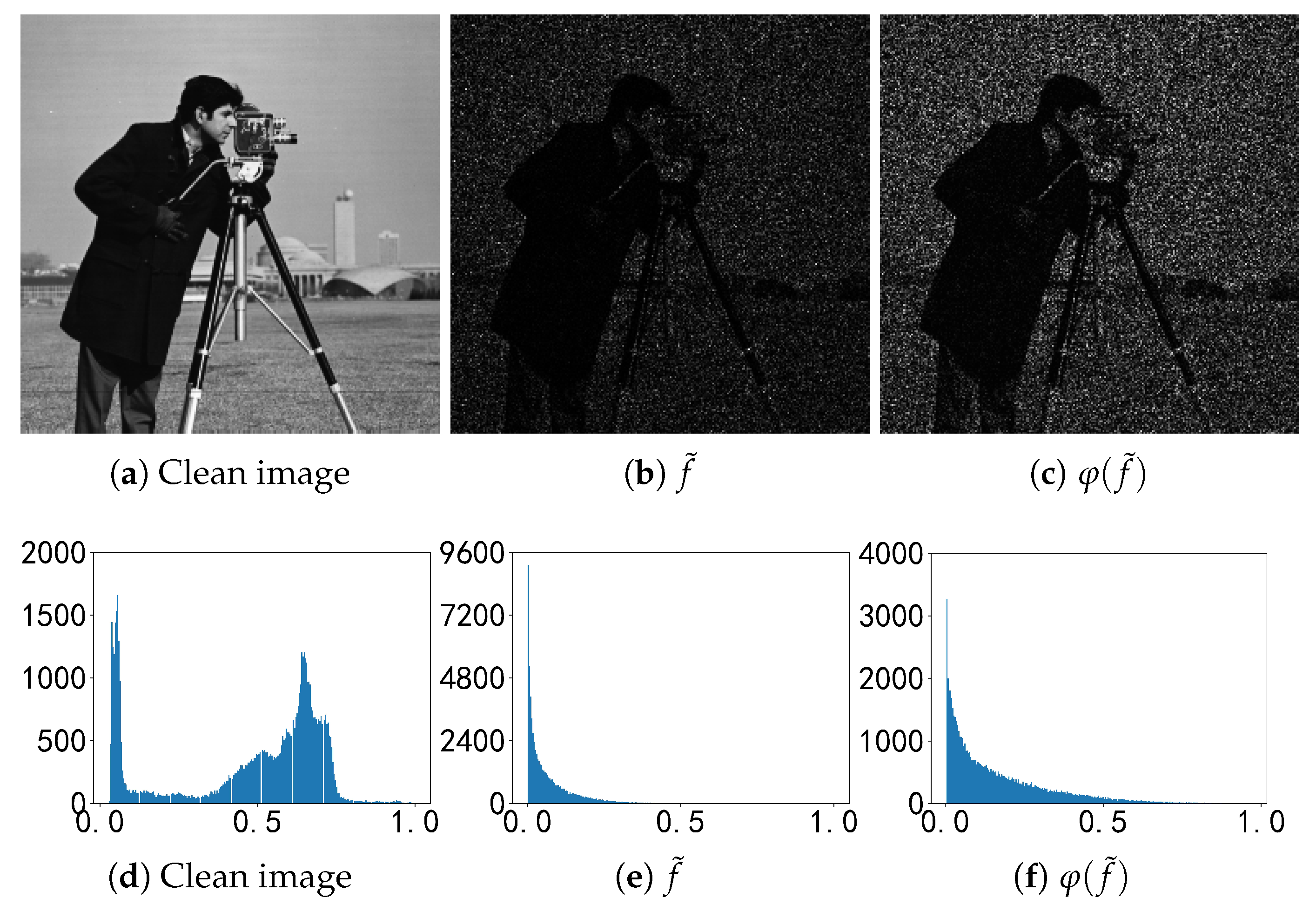
Figure 2a. To better illustrate the new degradation model, we show the original image ‘Cameraman’: the noisy image
with noise level
and the image
after the effect of the nonlinear transformation; see
Figure 3.
It can be seen that the nonlinear transformed image shows more image details without changing the shape of the noisy image distribution. In other words, the nonlinear correction is a modification of the pixel values without changing the size, geometry, or local structure of the image.
For the inverse problem, , u, and are instances of some random variables F, U, and V. In the following, if X is a random variable, we denote as its density function and S as the set of the pixels of the image. Moreover, we assume that the samples of the noise on each pixel are mutually independent and identically distributed with density function .
Proposition 1. Assume that U and V are independent random variables, with and as continuous density functions. Let us set ; we can deduce thatwhere is a constant and is a nonnegative given function. The proof of Proposition 1 is similar to that in [12]. 3.2. The Proposed Model and Its Properties
In our proposed model, the fidelity term is based on MAP estimation of the new degraded model. To better protect the image information, the regularization term is based on the -norm of TV and fractional-order bounded variation. For the fractional bounded variation, we also introduce a gray level indicator and use it as the weight of the adaptive fractional bounded variation.
Specifically, we consider the hybrid total variation regularization defined as
is a bounded open subset of
with Lipschitz boundary and
is a positive valued continuous function on
. In practice,
may be chosen as
where
, and for the sake of simplicity, we denote
by
.
where
c and
q are constants, and
.
Following the fidelity terms (6) obtained from MAP estimation, we propose the following multiplicative denoising model:
where
is a positive regularization parameter controlling the balance between the two terms in the objective function. In order to present the character of the proposed fractional method, we recall the total
-order variation and bounded
-total variation introduced in [
25,
37].
We first review the definitions and simple properties of a fractional-order derivative. Currently, the formula derived from the GL definition is used to calculate fractional derivatives numerically. In this paper, we use the algorithm based on fractional Fourier transform (FrFT) theory to solve the model in the frequency domain.
Definition 1 (Grünwald–Letnikov derivative)
. Assume α is a positive real number and , where n is an integer. is a function where ; thenis the left-sided Grünwald–Letnikov derivative of , where is the integer such that , and denotes the generalized binomial coefficient. Similarly, the right-sided Grünwald–Letnikov derivative is defined as Definition 2 (See [
37])
. We assume to be in , if u has bounded total variation, i.e.,where . If
has bounded
-total variation in
, there is a Radon vector measure
on
such that
Definition 3 (bounded
-
). The bounded total α-order variation of u is defined bywhere denotes the space of special test functions , and . and denotes a fractional α-order derivative of along the direction. Based on the bounded variation (BV) seminorm, the
-
norm is defined by
and furthermore, the space of functions of
on
can be defined by
Remark 1. The space is a Banach space.
Proposition 2. The functional is convex.
Proposition 3 (Lower semicontinuity)
. Assuming that Ω
is bounded and with a Lipschitz boundary, and in . Then, there exists a minimum value u, and Proposition 4 (A weak topology). is a Banach space endowed with the norm . We will not use this topology, which possesses no good compactness properties. Classically, in one works with the topology; we have in , and for all ϕ in , then .
Proposition 5 (Compactness). Suppose that the sequence is bounded in . Then, there exist a subsequence and u in such that weakly converges to u in .
Theorem 1 (Existence). The functional has a minimum.
Proof. is a Banach space,
is weak sequentially lower semicontinuous on
, and
is weak sequentially compact for the result of Proposition 5. With the Prop. 38.12(d) in [
38], we prove that the functional
has a minimum. □
Proposition 6. The functional has a unique minimizer in when .
Proof. For , we have and . It can be obtained that is strictly convex if . Furthermore, since is convex, we can deduce that has a unique minimizer in . □
3.3. Similarity Measure
Since multiplicative noise has unfavorable properties, a new similarity measure is deduced consisting of a probability density function specially chosen for this type of noise in [
39], and all random variables are supposed to be real-valued, continuous, and defined on a fixed probability space
.
Proposition 7. Assuming that the distribution of is unknown and the Gamma noise is distributed with , then we have the similarity measure functionwhere is symmetric and not bounded from above. Specifically, for all . The proof of Proposition 7 is is similar to that in [
39].
Proposition 8. With the definitions of the similarity measure function and Gamma function, we have Proof. With the Gamma noise distribution
, we obtain that
By the definition of the Gamma function [
40], note the following equality:
Hence, we finally obtain
□
For the similarity measure function , one may expect for a fixed that this function would reach its maximum value if . However, for and a known , the similarity measure function reaches its maximum value for . We assume that , then measure the similarity of u and . If , is a known noise-free image with enhancement, and . This means that the role of the proposed model changes from two tasks, denoising and enhancement, to enhancement of the image only. If L is small, we find that for the special case . Then, should be small, and denoising needs to be made the top priority. In this case, u and should not be too close to each other, and the weight of the regularization term in the model should be increased by adjusting the parameter.
3.4. Bias Correction
In [
13], Dong and Zeng found that the AA model produces an image pixel value offset after a theoretical analysis, so a bias correction for the AA-based model is necessary. In addition, they add a new quadratic term to the AA model and reduce the influences from the bias by keeping the restored image in the same scale as the degraded image
f by preserving the mean, i.e.,
with
as a solution. However, this strategy is not effective enough to deal with the high dynamic intensity range of SAR images, which makes noise removal and local detail enhancement difficult. In this section, we find that the new degraded model (8) is useful for reducing the influences from the bias through theoretical analysis similar to that in [
41].
Proposition 9. Suppose that , and . Let be a solution of (6); then we have the solution satisfying Proof. We define a function as follows:
where
. Since
is a local minimizer of
, we have
, which leads to
According to
older’s inequality and the nonnegativity of
and
, we obtain
Combining both, we then have
□
Due to the new degraded model (5), is normalized to deal with the high dynamic range problem, and is adjustable with the parameter c and p. If and , then . Thus, the nonlinear transformation function makes it possible to give a proper bias correction on (8). With the new degraded model (5), we can not only enhance the local contrast of the restoring images but also give a satisfactory bias correction by selecting the best parameters c and p. Because better peak signal-to-noise ratio (PSNR) results can usually be obtained with a small bias, complete elimination of bias is not necessary.
4. SAV Algorithm for Solving the Proposed Variational Model
There are a number of numerical algorithms available for solving the variational model (7), such as the Split–Bregman algorithm [
42], primal-dual algorithm in [
43,
44,
45], and alternating direction method [
46,
47] which are widely used to solve
regularization. However, these optimization algorithms are mainly used to deal with linear models, and their convergence is also based on the corresponding linear models. In order to solve the nonlinear model, Shen et al. [
48] extended the IEQ to the scalar auxiliary variable (SAV), resulting in more robust schemes with less restrictions on the energy functionals. In this paper, we solve problem (7) by adopting the SAV approach.
The SAV approach is used to solve the minimization problem for a free energy functional
. The problem can be modeled by partial differential equations having the form of gradient flows in
, which can be written as
where
denotes the variational derivative.
The typical free energy functional
usually contains a quadratic term, which can be written as
where
is a nonlinear term. In order to employ the SAV approach,
should be bounded from below [
49], i.e., there always exists a positive constant
such that
. Therefore, we modify
E by adding a positive constant
to
E without altering the gradient flow.
Consider the proposed free energy functional
, where
Then, the corresponding gradient flow in
is as follows:
By introducing a scalar auxiliary variable
, the problem (9) can be equivalently rewritten as
Then, a first-order SAV scheme with explicit treatment for problem (12) is as follows:
We used the same strategy as in [
49], updating the variable
via
. Next, we will analyze the stability property of the scheme in the following theorem.
Theorem 2. The scheme (13)–(15) is unconditionally stable in the sense that the following discrete energy law holdswhere . In addition to the unconditional stability, the scheme (13)–(15) can be efficiently implemented. Firstly, we eliminate
and
from (13)–(15) to obtain
Let
then the above equation can be written as
To determine
from the above equation, we multiply (16) with
and denote
. Taking the inner product with
, we then obtain
where
. Since
is a positive operator, we then have
and
. With the equation above, we deduce that
- (i)
Calculation of and : solving the elliptic problem (16), we can also obtain .
- (ii)
Evaluation of using (17).
- (iii)
With
known, we can Calculate
from (16) as
The adaptive time step technique allows us to reduce the computation time compared to keeping the time step constant [
50,
51]. In order to reduce the computation time, we adopt the same adaptive time stepping strategy for our provably stable scheme. This adaptive time step strategy is applied in Algorithm 1. The local error of a numerical method with order
p is modeled as
, where
denotes the time step size,
C is a constant, and
is a reference tolerance. Here, we set
. Then, we use to update the time step size
where
is a default coefficient, and we chose
. In addition, the minimum and maximum time steps are set as
and
.
| Algorithm 1 SAV algorithm to solve the proposed model. |
| Input: f, , p, q, c, r, , . |
| Initialize: , , . |
| Calculation: compute by the first-order SAV scheme with . |
| Update: . |
| if then |
| recalculate time step and go to step 3; |
| else |
| update . Stop or set and go to step 3; |
| end if |
| return . |
Computation of the Algorithm in the Frequency Domain
Fractional-order derivatives in the frequency domain are easy to calculate numerically due to the fast discrete Fourier transform. Therefore, we use the Fourier transform to define the fractional-order derivative in this paper. The SAV algorithm is based on 2D DFT to solve the proposed model. It is one important aspect of the algorithm that it considers the input image as a periodic image, which is equivalent to imposing a period boundary condition on the proposed model. However, discontinuities across the image borders are unavoidable in practice. In this paper, we use a similar algorithm as in [
52] by extending the image symmetrically about its borders in order to reduce the discontinuities across the image borders.
Using the two-dimensional (2D) discrete Fourier transform, for any function
, we obtain
and the fractional order derivatives are
where
.
In the actual numerical implementation, we use the 2D discrete Fourier transform to calculate the fractional-order derivative. It is an important aspect of the algorithm that it treats the input image as a periodic image. We sample the original continuous image by the uniform grid and obtain for , where the grid size .
The 2D discrete Fourier transform of
is
where
and
are the frequencies which correspond to
x and
y.
With the translation property of the 2D DFT
the first-order partial difference in the frequency domain can be obtained as
Thus, the fractional-order partial difference in the frequency domain is defined as
Then, we use the central difference scheme in [
24] to compute the fractional-order difference, which can be defined as
where the notation
denotes the 2D DFT operator and the notation
denotes the 2D inverse discrete Fourier transform (IDFT) operator. To simplify, let K be a purely diagonal operator defined by
Then, we obtain
and
where
is the adjoint of
and
. Similarly,
can also be obtained. Since
is the complex conjugation of
K, we have
where
is the complex conjugation.
According to the problem (11), we compute
by
where
is a sufficiently small positive parameter.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}