
A Seventh Order Family of Jarratt Type Iterative Method for Electrical Power Systems



Abstract
1. Introduction
- (i)
- The system is in a sinusoidal steady-state with balanced three phase steady-state conditions.
- (ii)
- Constant, linear and lumped-parameter branches are used to make up the transmission network.
- (iii)
- Demands at each (load) bus are the specified real (P) and reactive power (Q).
- (iv)
- The specified real power generation at each (generator) bus excluding one generator bus.
2. Derivation of the Scheme
2.1. Special Cases
2.2. Computational Cost
3. Numerical Results
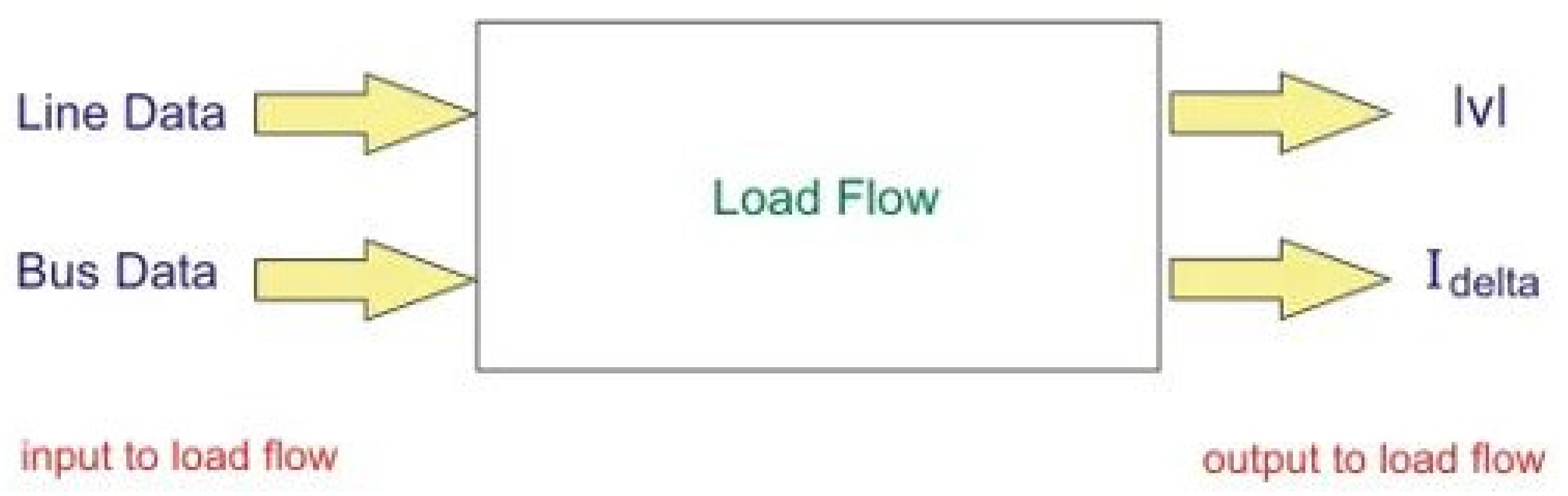
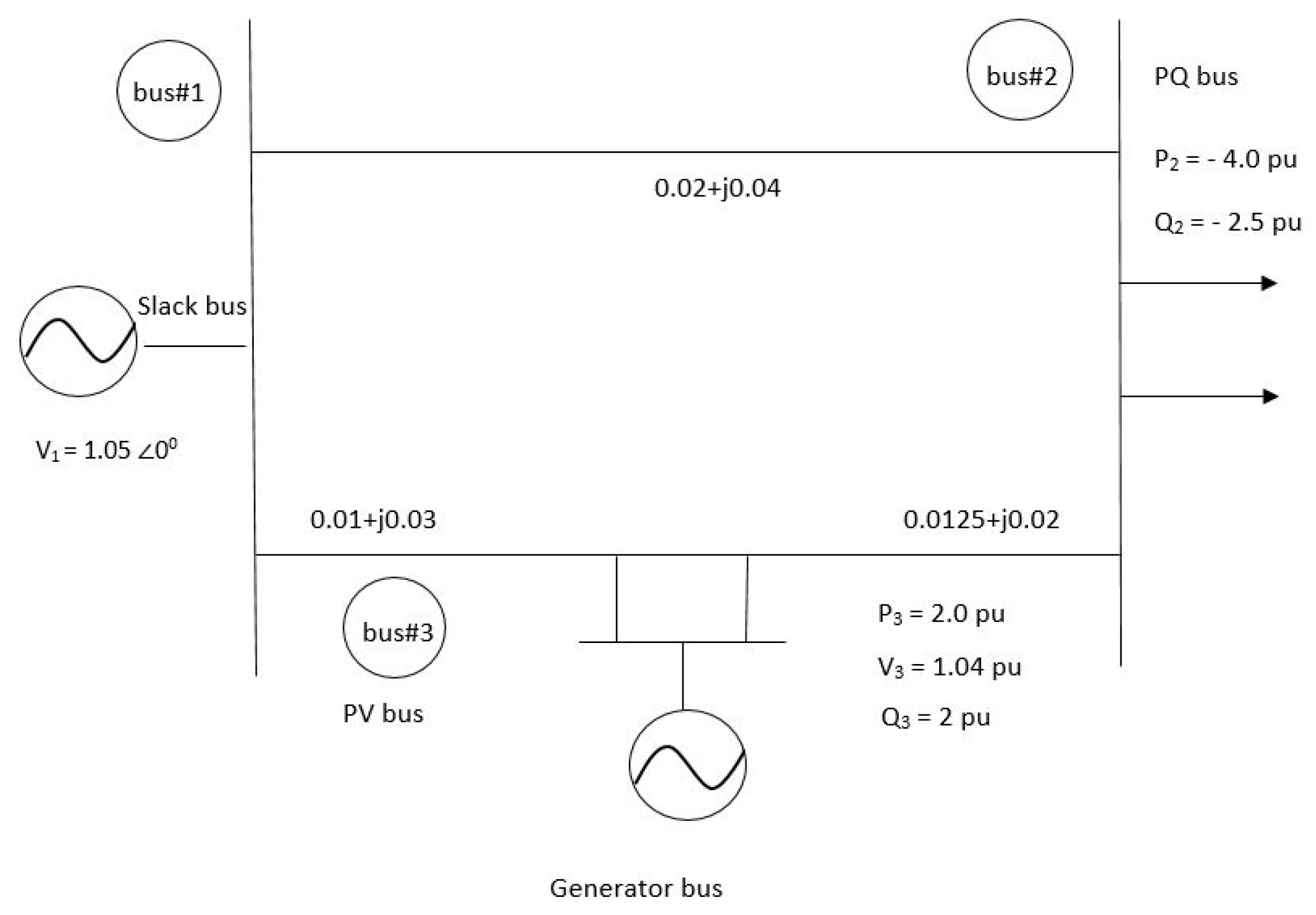
3.1. Equations for Load Flow Analysis
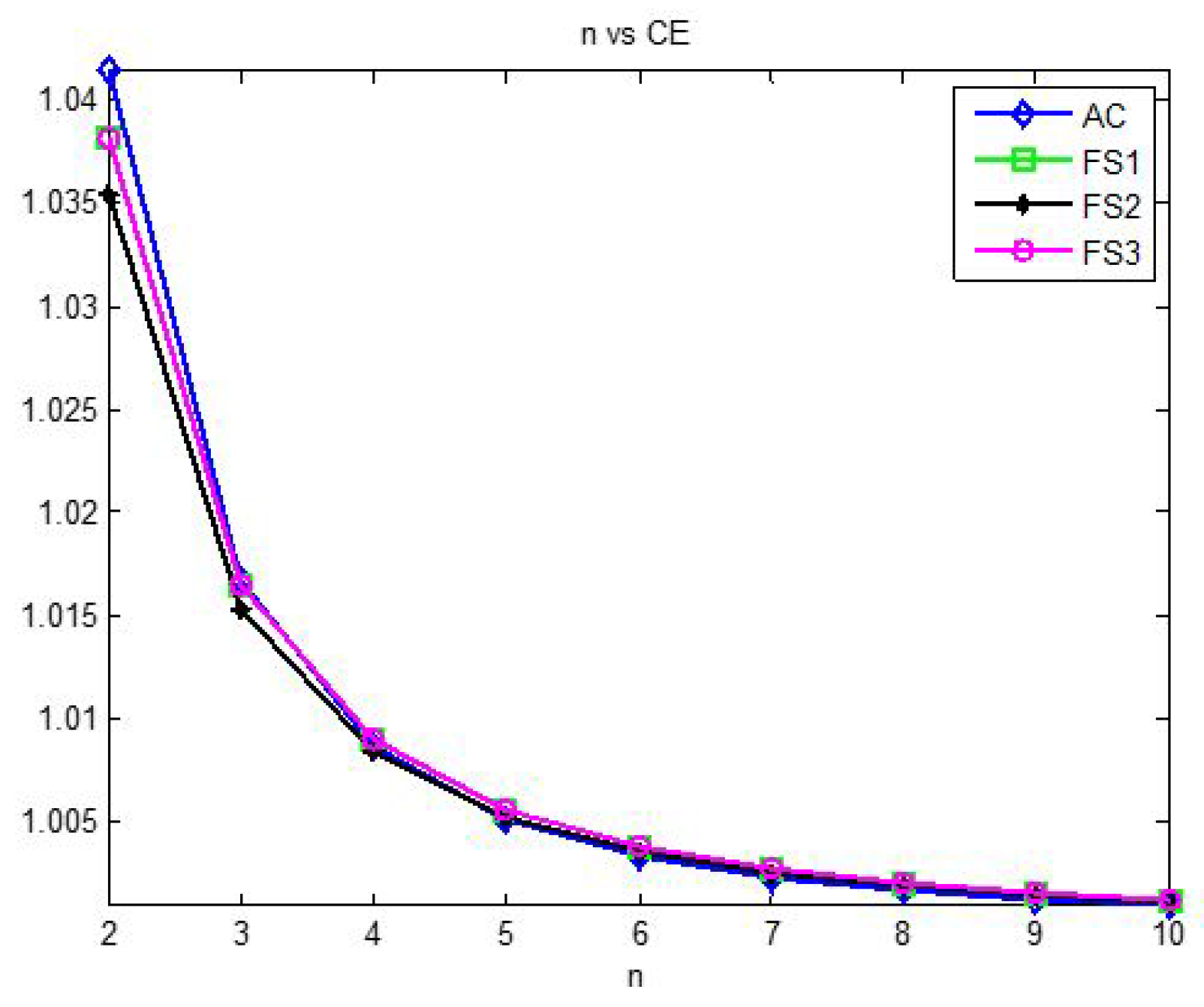
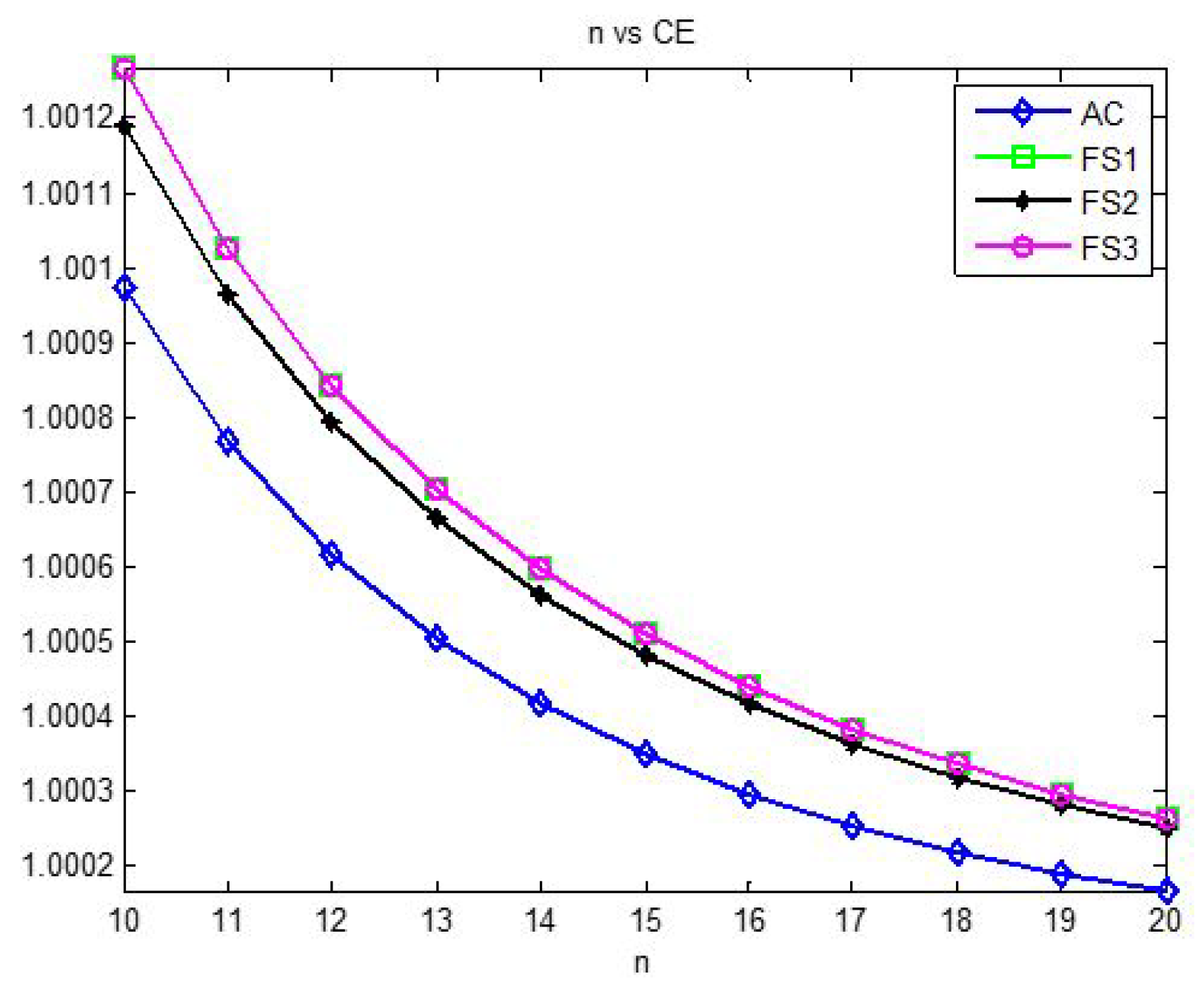
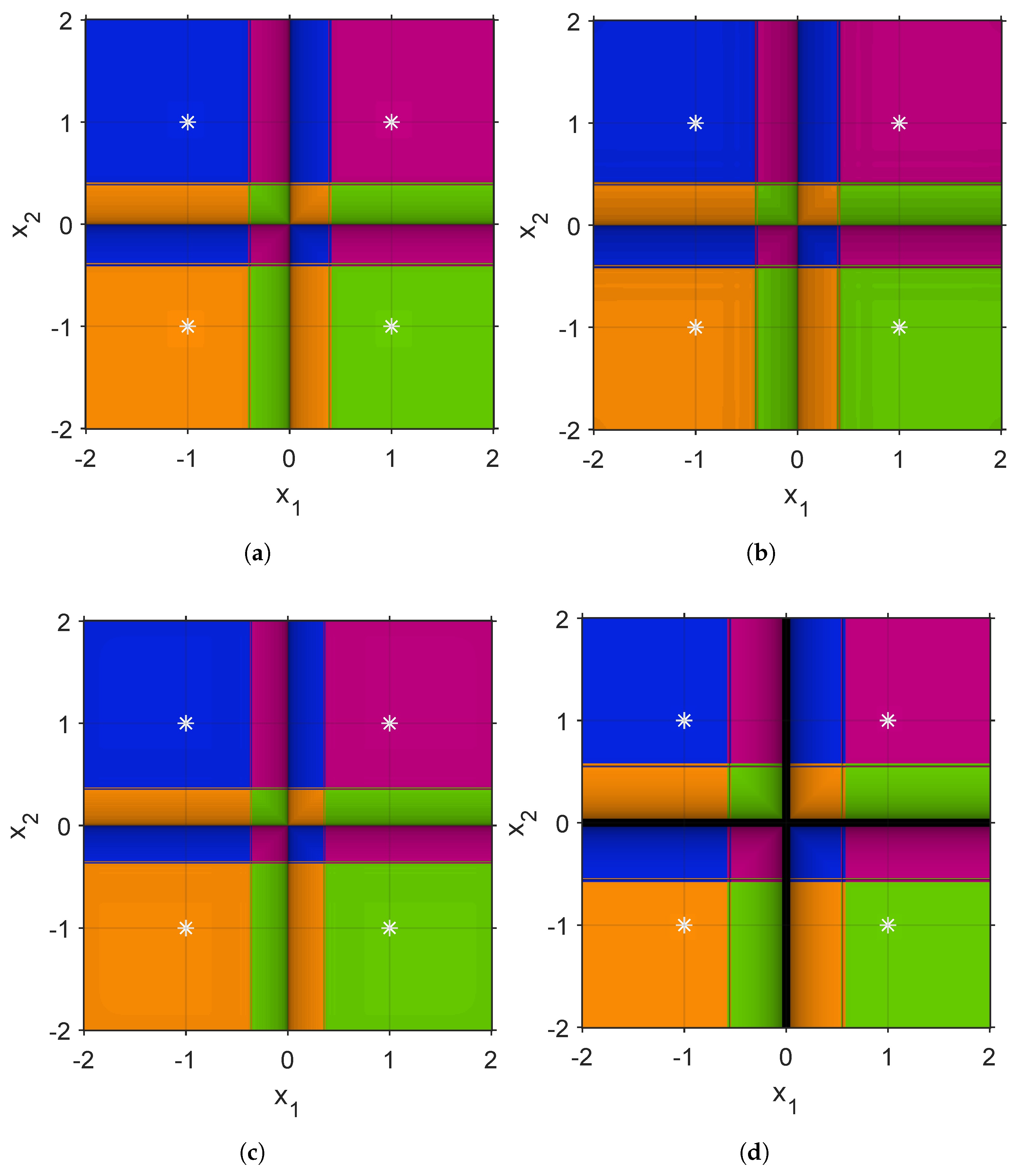
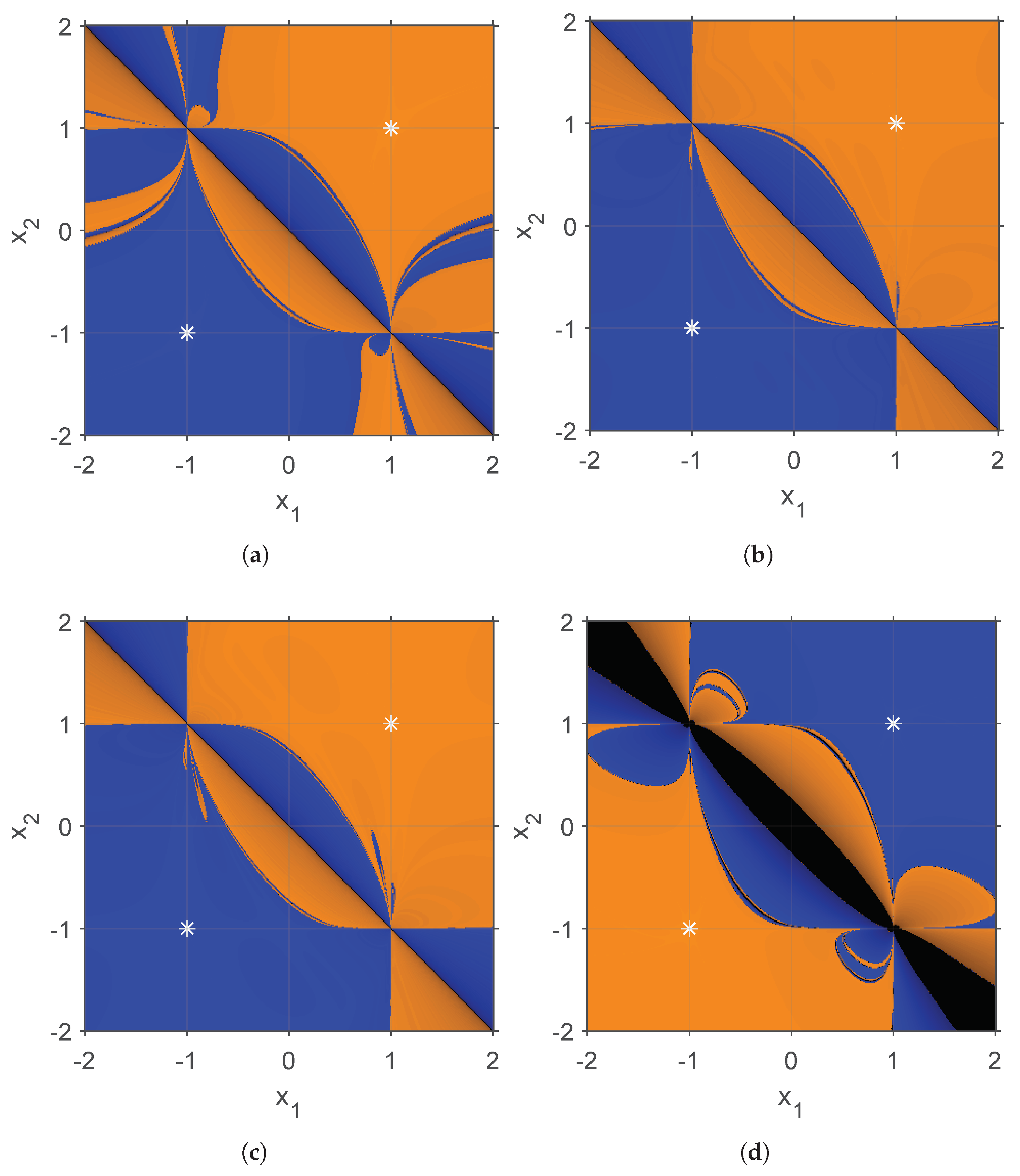
3.2. Stability of the Methods
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moré, J.J. A collection of nonlinear model problems. In Computational Solution of Nonlinear Systems of Equations, Lectures in Applied Mathematics; Allgower, E.L., Georg, K., Eds.; American Mathematical Society: Providence, RI, USA, 1990; Volume 26, pp. 723–762. [Google Scholar]
- Grosan, C.; Abraham, A. A new approach for solving nonlinear equations systems. IEEE Trans. Syst. Man Cybernet Part A Syst. Humans 2008, 38, 698–714. [Google Scholar] [CrossRef]
- Lin, Y.; Bao, L.; Jia, X. Convergence analysis of a variant of the newton method for solving nonlinear equations. Comput. Math. Appl. 2010, 59, 2121–2127. [Google Scholar] [CrossRef]
- Ward, J.B.; Hale, H.W. Digital computer solution of power flow problems. AIEE Trans. 1956, 75, 398–404. [Google Scholar]
- Iwamoto, S.; Tamura, Y. Load flow calculation method for ill-conditioned power systems. IEEE Trans. Power Appar. Syst. 1981, 100, 1736–1743. [Google Scholar] [CrossRef]
- Stott, B. Review of load-flow calculation methods. Proc. IEEE 1974, 62, 916–929. [Google Scholar] [CrossRef]
- Tinney, W.F.; Hart, C.E. Power flow solution by Newton’s method. IEEE Trans. Power Appar. Syst. 1967, PAS-86, 1449–1460. [Google Scholar] [CrossRef]
- Stott, B.; Alsac, O. Fast decoupled load flow. IEEE Trans. Power Appar. Syst. 1974, PAS-93, 859–869. [Google Scholar] [CrossRef]
- Changbum, C.; Neta, B. A third-order modification of Newton’s method for multiple roots. Appl. Math. Comput. 2009, 211, 474–479. [Google Scholar]
- Dzunic, J.; Petkovic, M.S. A family of three-point methods of Ostrowski’s type for solving nonlinear equations. J. Appl. Math. 2012, 2012, 425867. [Google Scholar] [CrossRef]
- Soleymani, F.; Vanani, S.K. Numerical solution of nonlinear equations by an optimal eighth-order class of iterative methods. Ann. Univ. Ferrara 2013, 59, 159–171. [Google Scholar] [CrossRef]
- Behl, R.; Argyros, I.K. A new higher order iterative scheme for the solutions of nonlinear systems. Mathematics 2020, 8, 271. [Google Scholar] [CrossRef]
- Behl, R.; Sarría, I.; González, R.; Magreñán, A.A. Highly efficient family of iterative methods for solving nonlinear models. J. Comput. Appl. Math. 2019, 346, 110–132. [Google Scholar] [CrossRef]
- Kansal, M.; Cordero, A.; Bhalla, S.; Torregrosa, J.R. New fourth and sixth-order classes of iterative methods for solving systems of nonlinear equations and their stability analysis. Numer. Algor. 2021, 87, 1017–1060. [Google Scholar] [CrossRef]
- Lee, M.Y.; Kim, Y.I. Development of a family of Jarratt-like sixth-order iterative methods for solving nonlinear systems with their basins of attraction. Algorithms 2020, 13, 303. [Google Scholar] [CrossRef]
- Amiri, A.; Cordero, A.; Darvishi, M.T.; Torregrosa, J.R. Stability analysis of a parametric family of seventh-order iterative methods for solving nonlinear systems. Appl. Math. Comput. 2018, 323, 43–57. [Google Scholar] [CrossRef]
- Abad, M.; Cordero, A.; Torregrosa, J.R. A family of seventh order schemes for solving nonlinear systems. Bull. Math. Soc. Sci. Math. Roum. Tome 2014, 57, 133–145. [Google Scholar]
- Behl, R.; Arora, H. A novel scheme having seventh-order convergence for nonlinear systems. J. Comput. Appl. Math. 2022, 404, 113301. [Google Scholar] [CrossRef]
- Grau-Sánchez, M.; Noguera, M.; Amat, S. On the approximation of derivatives using divided difference operators preserving the local convergence order of iterative methods. J. Comput. Appl. Math. 2013, 237, 363–372. [Google Scholar] [CrossRef]
- Moysi, A.; Ezquerro, J.A.; Hernández-Verón, M.Á.; Magreñán, Á.A. On the set of initial guesses for the secant method. Math. Meth. Appl. Sci. 2023, 2023, 1–14. [Google Scholar] [CrossRef]
- Ortega, J.M.; Rheinboldt, W.G. Iterative Solutions of Nonlinear Equations in Several Variables; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Cordero, A.; Torregrosa, J.R. On interpolation variants of Newton’s method for functions of several variables. J. Comput. Appl. Math. 2010, 234, 34–43. [Google Scholar] [CrossRef]
- Soleymani, F.; Sharifi, M.; Shateyi, S.; Haghani, F.K. Iterative methods for nonlinear equations or systems and their applications. J. Appl. Math. 2014, 2014, 705375. [Google Scholar] [CrossRef]
- Chicharro, F.I.; Cordero, A.; Torregrosa, J.R. Drawing dynamical and parameters planes of iterative families and methods. Sci. World J. 2013, 780153. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus Type | Fixed Quantities | Variable Quantities |
|---|---|---|
| Slack | voltage magnitude, voltage angle | real power, reactive power |
| PQ | real power, reactive power | voltage magnitude, voltage angle |
| PV | real power, voltage magnitude | reactive power, voltage angle |
| Methods | FE of G | FE in | FE in | Total FE | I | CI |
|---|---|---|---|---|---|---|
| 3 | 2 | 1 | ||||
| 3 | 2 | 1 | ||||
| 3 | 2 | 1 | ||||
| 3 | 2 | 1 |
| m | ||||
|---|---|---|---|---|
| 1 | − | |||
| 2 | ||||
| 3 | ||||
| 1 | − | |||
| 2 | ||||
| 3 | ||||
| 1 | − | |||
| 2 | ||||
| 3 | ||||
| 1 | − | |||
| 2 | ||||
| 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yaseen, S.; Zafar, F.; Chicharro, F.I. A Seventh Order Family of Jarratt Type Iterative Method for Electrical Power Systems. Fractal Fract. 2023, 7, 317. https://doi.org/10.3390/fractalfract7040317
Yaseen S, Zafar F, Chicharro FI. A Seventh Order Family of Jarratt Type Iterative Method for Electrical Power Systems. Fractal and Fractional. 2023; 7(4):317. https://doi.org/10.3390/fractalfract7040317
Chicago/Turabian StyleYaseen, Saima, Fiza Zafar, and Francisco I. Chicharro. 2023. "A Seventh Order Family of Jarratt Type Iterative Method for Electrical Power Systems" Fractal and Fractional 7, no. 4: 317. https://doi.org/10.3390/fractalfract7040317
APA StyleYaseen, S., Zafar, F., & Chicharro, F. I. (2023). A Seventh Order Family of Jarratt Type Iterative Method for Electrical Power Systems. Fractal and Fractional, 7(4), 317. https://doi.org/10.3390/fractalfract7040317