1. Introduction
Nonlinear equations [
1,
2,
3,
4] occur frequently in various fields of science, artificial intelligence, and engineering. Finding the roots of a nonlinear equation [
5,
6,
7,
8] involves determining the value of a variable that satisfies a given equation. A zero
of
is called a multiple root with multiplicity
m if
and
.
It is known that the Newton method is the most used method for solving the equations, given by
Researchers [
9,
10,
11,
12,
13,
14,
15] are interested in finding multiple roots of nonlinear equations [
16,
17,
18,
19,
20] and investigating the dynamics by exploring the relevant basins of attraction [
21,
22,
23,
24,
25,
26].
Geum-Kim-Neta [
27,
28] constructed a class of two-point, sixth-order, multiple-root solvers. Since the following two methods are faster and require fewer iterations per point on average, we have chosen two methods as follows. These two schemes, called here (X1) and (X2), are given by
and
where
In this paper, we propose a three-point, sixth-order method by adding a third step, as follows:
where
is analytic in a small neighborhood of 0, and
is holomorphic in a neighborhood of
.
Definition 1. Let be a sequence converging to a zero α and be the n-th iterative error. If there exist real numbers and , such that the following error equations satisfythen or δ is called the asymptotic error constant, and β is defined as the order of convergence [1]. Definition 2. Suppose that the theoretical asymptotic error constant and the convergence order are known [2,3]. The computational convergence order is defined. Then . Definition 3. If a fixed point ρ of a rational map J is attracting, then all nearby points of ρ are attracted to ρ under a rational map J. The collection of all points whose iterates under J converge to ρ is called the basin of attraction of ρ.
We investigate the convergence behavior of the proposed scheme in
Section 2. The numerical results and the basins of attraction for the typical examples are shown in
Section 3. In addition, the basins of attraction for the equation in the blood rheology model are shown, and the convergent regions for selected values are plotted in
Section 3. Finally,
Section 4 is discussed in the last section.
2. Convergence Analysis
In this section, we determine the maximal convergence order of the developed schemes. We investigate the main theorem describing the convergent behavior of the proposed schemes and address how to construct weight functions and for sixth-order convergence. It is sufficient to consider weight functions and up to the fifth-order terms in in terms of .
Let a function
have a root
of multiplicity
and be analytic in a small neighborhood of
.
where
is analytic in a small neighborhood of the origin 0 and
is holomorphic in a small neighborhood of
.
Using the Taylor expansion about
, we have
where
,
for
.
For convenience, we denote
by
e without subscript
n. Dividing (
5) by (
6), we have
where
and
By Taylor’s expansion, we have expression
k, as follows:
where
for
.
Using
k in (
8), and expanding the Taylor series of
about 0 up to the fifth-order term, we find
where
for
.
Substituting (
5)–(
9) into
, we have
where
for .
Choosing
,
, we have
Then we obtain
where
.
With the use of (
5) and (
12), we have
v as follows:
where
.
Expanding the Taylor series of
about (0,0) up to the fifth-order term, we find
where
for
.
By Substituting (
5)–(
14) into the proposed scheme (
4), we have
where
and the coefficients
depend of
m,
, and
.
Solving
for
, we have
Using
into
, we have
Substituting into , we obtain .
Substituting
and
into
, we have
and
Substituting
,
into
, we have
and
Putting (
17)–(
21) into
, we obtain
where
Then the proposed method, (
4), is of the sixth order and possesses the following error equation:
where
Theorem 1. Let . Let a function have a multiple root α with multiplicity m. Assume that f is analytic in a neighborhood of α. Let for . Let be an initial value in a neighborhood of zero α. Let be defined in (9) and let be defined in (14). Suppose , , and hold. Then the iterative scheme, (4), is of the sixth-order and has the following error equation:where is defined in (22). 3. Numerical Experiments
Based on the convergence analysis, Taylor-polynomial forms of
and
are given by
where
and
,
,
.
Even if various forms of and are possible, we limit ourselves to consider four forms, as follows:
The product of two univariate functions
The numerical experiments are carried out using Mathematica programming to confirm the developed theory. For the experiments, we maintain a minimum of 100 digits of precision to achieve the specified accuracy. If the root is not exact, it is approximated by a value with greater precision, possessing more significant digits than the specified number of precision.
Various numerical experiments have been conducted with Mathematica software 13.0 [
29] to confirm the developed theory. In
Table 1, the computational convergence order approaches 6. They confirm the sixth-order convergence with test functions
, and
, as follows:
Methods
, and
have been applied to the test functions
below:
In
Table 2, we compare errors
of methods
, and
. The least errors within the prescribed error bound are marked in boldface. Method
shows slightly better convergence in this experiment. The local convergence depends on the function, an initial guess, the root, the multiplicity, and the weight functions. So, for a selected set of test functions, one scheme is hardly expected to show better achievement than the others.
We study the dynamics of numerical methods
, and
. In
Table 3, abbreviations
CPU,
tcon,
avg, and
tdiv denote the value of the CPU time for sixth-order convergence, the total number of convergent points, the value of the average iterative number for sixth-order convergence, and the number of divergent points.
Table 3 shows the statistical data for the basins of attraction.
In
Figure 1,
Figure 2,
Figure 3 and
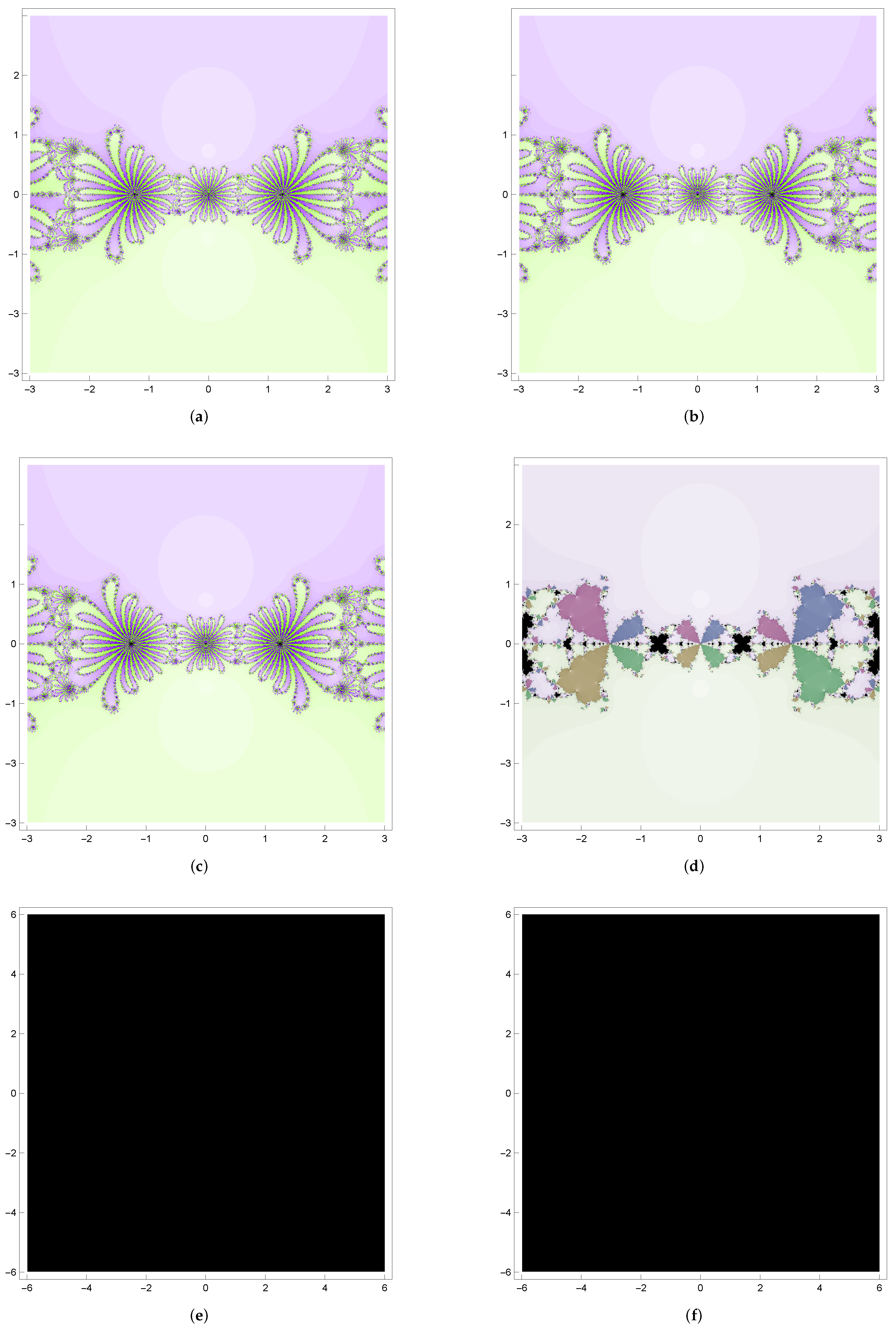
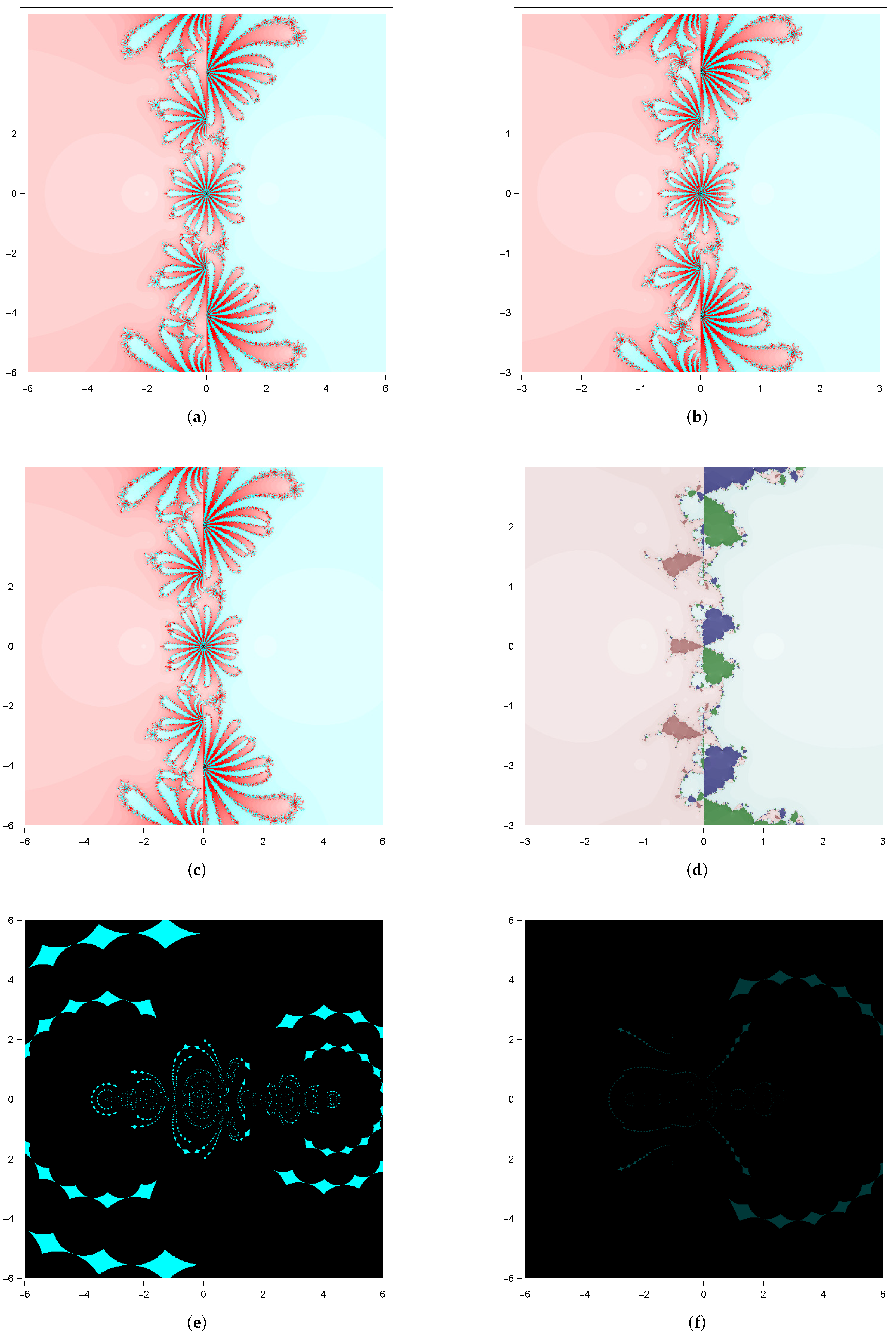
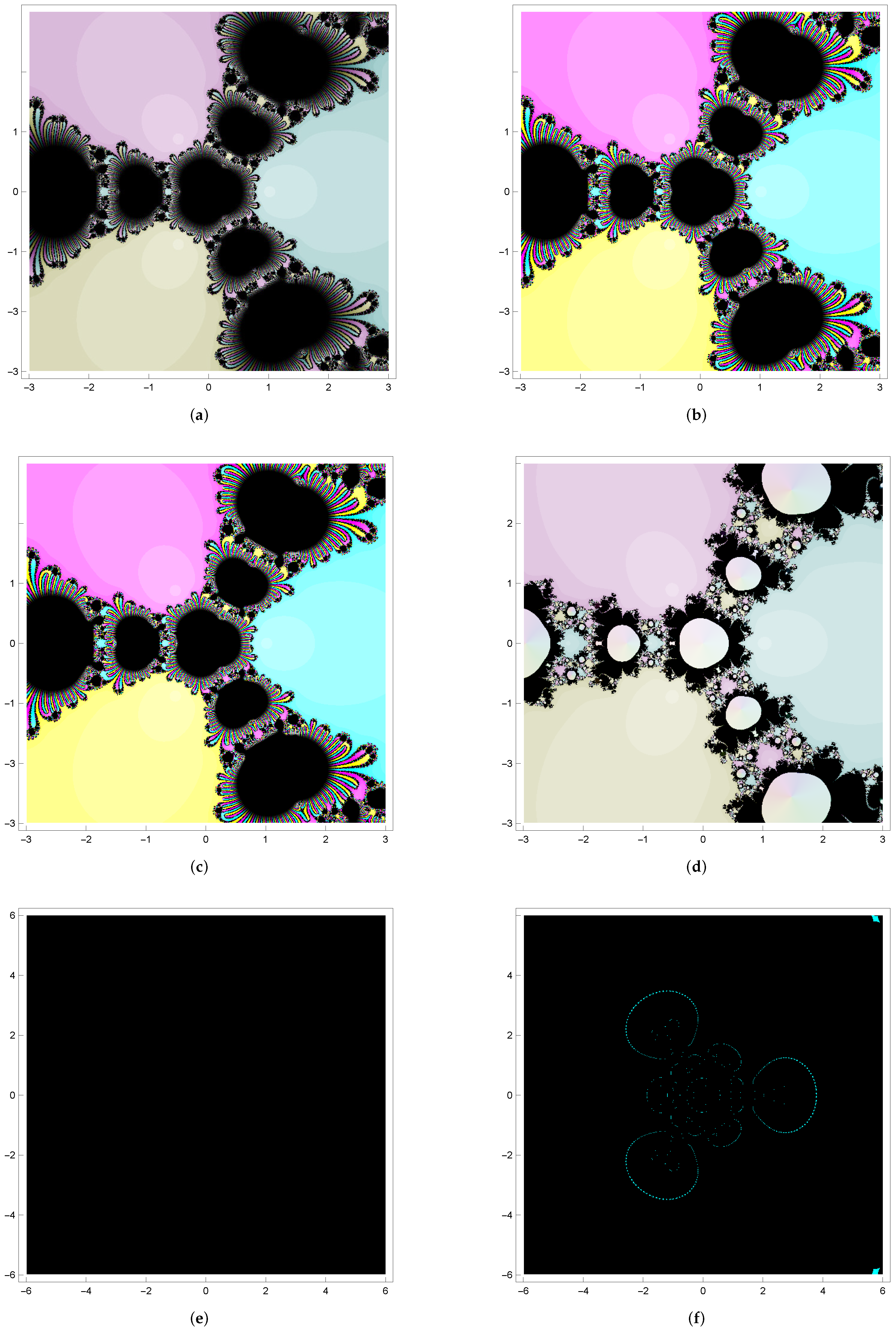
Figure 4, a six-by-six square region centered at the origin includes all the roots of the test functions. A
uniform grid in this region is used to mark initial values for the iterative schemes to draw the basins of attraction. The grid point of a square is colored differently according to the number of iterations required for convergence. The point is colored in black if the methods do not converge.
Example 1. We choose a quadratic polynomial raised to the power of two:with roots with a multiplicity of 2. Basins of attraction for (M1), (M2), (M3), (M4), (X1), and (X2) are illustrated in Figure 1. Each basin is painted in various colors. Basins for are painted purple and basins for are painted green in Figure 1 (a)–(c). At zero, its color is light (white), while becoming darker for more iterative numbers required for convergence within the set iteration. Method (M1) performs better in terms of CPU, and M4 is better in terms of avg for . There are similar lobes along the boundaries of the basins in (a), (b), and (c). Picture (d) has colored (yellow, magenta, green, blue, and so on) carrot shapes around the boundary. Methods (X1) and (X2) do not have the value of the total convergent point, and pictures (e) and (f) show the black region. Example 2. As a second test example, we selected a quadratic polynomial raised to the power of three with all real roots: The roots are with a multiplicity of 3. Basins of attraction for (M1)-(X2) are illustrated in Figure 2. Method (M4) performs better in terms of avg. Basins for are painted red and basins for are blue. There are similar lobes along the boundaries of the basins in Figure 2a–d has colored (blue, green, magenta) carrot shapes around the boundary. Methods (X1) and (X2) have considerable black points and circular patterns made up of blue diamond shapes in Figure 2e,f.
Example 3. We choose a cubic polynomial raised to the power of two:with roots . Method (M4) is better regarding CPU and avg. The basins of method (X1) are represented by black regions and the basins of method (X2) are represented by circular light blue patterns in Figure 3. The local convergence depends on the function, an initial value, the multiplicity, and a root. It cannot be said that one iterative method is always better than other methods. It is essential to choose an initial guess that guarantees the convergence of the numerical method. Deciding how close the initial guess should be to the root is not easy, as it depends on computational precision, the selected function, and the error bound. To choose a stable initial value, we can use basins of attraction in
Figure 1,
Figure 2,
Figure 3 and
Figure 4.
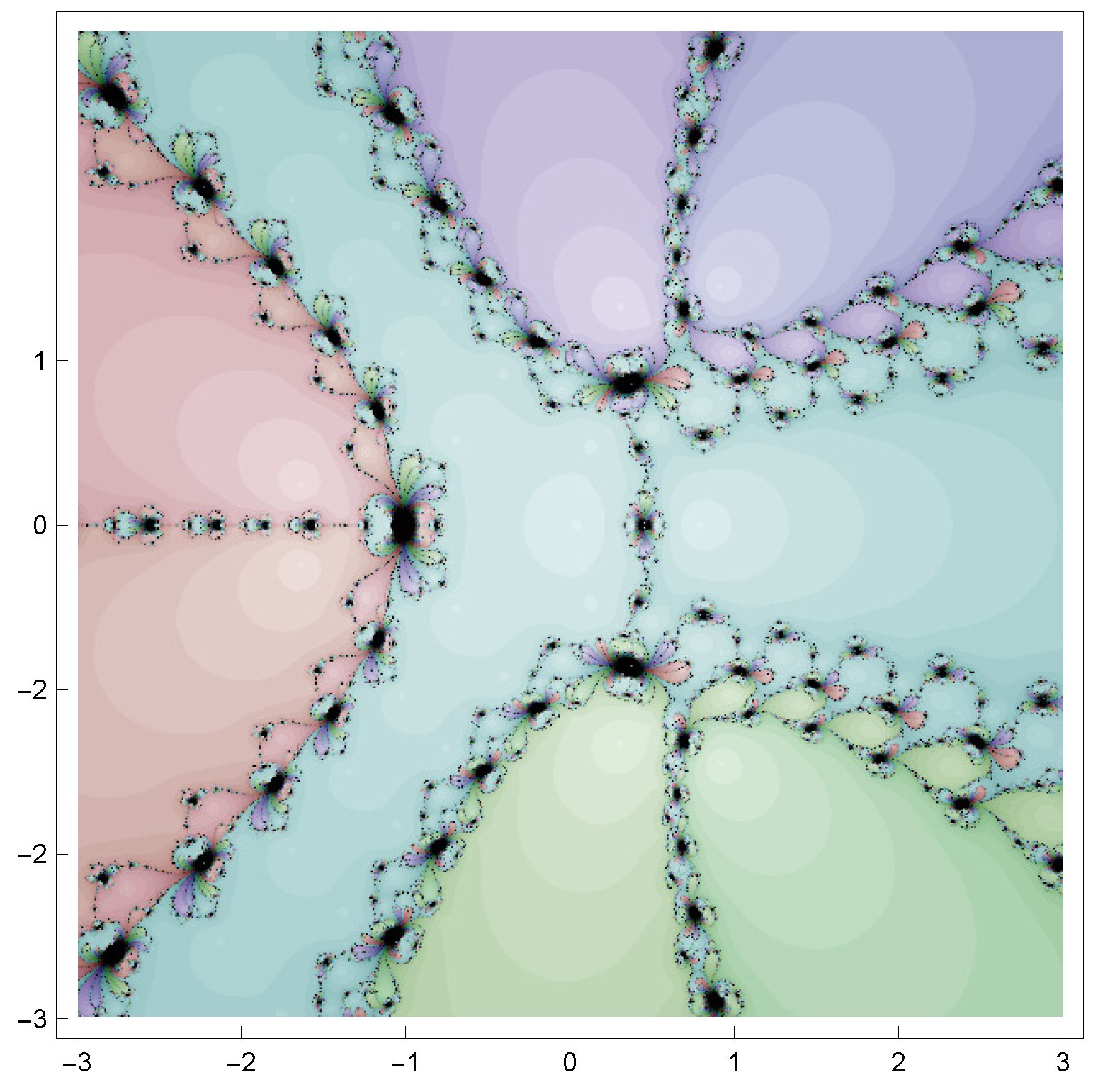
We use the equation in the blood rheology model [
30]
to carry out the experiment (M1) for the basins in
Figure 4.
Substituting
and
into (
24) to plot the convergent region, we select the following method, called (M5):
Figure 5 shows the convergence region [
31] of (M5) according to
and
.
4. Conclusions
Even though the proposed methods (M1)–(M4) are of the sixth order, like the existing methods (X1) and (X2), the number of divergent points for (M1)–(M4) is much smaller than for (X1) and (X2). The basins for (X1) and (X2) are black for and the basins for (X1) and (X2) for have some blue patterns but also a lot of black points. In summary, we find that the proposed methods are faster and require fewer iterations per point on average. It is important to choose the type of initial guess for the iterative schemes, ensuring it is chosen near the root for convergence. In future work, the fractal behavior behind the improved methods will be studied in more detail.
Funding
The author is supported by the Basic Science Research Program through the National Research Foundation of Korea, funded by the Ministry of Education under research grant project number NRF-2021R1A2C1012922.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
We warmly thank two anonymous referees for several comments and suggestions, which helped improve this work.
Conflicts of Interest
The author declares no conflict of interest.
References
- Ahlfors, L.V. Complex Analysis; McGraw-Hill Book, Inc.: New York, NY, USA, 1979. [Google Scholar]
- Hörmander, L. An Introduction to Complex Analysis in Several Variables; North-Holland Publishing Company: Amsterdam, The Netherlands, 1973. [Google Scholar]
- Shabat, B.V. Introduction to Complex Analysis PART II, Functions of Several Variables; American Mathematical Society: Providence, RI, USA, 1992. [Google Scholar]
- Devaney, R.L. An Introduction to Chaotic Dynamical Systems; Addison-Wesley Publishing Company, Inc.: Boston, MA, USA, 1987. [Google Scholar]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Mach. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Soleymani, F.; Babajee, D.K.R. Computing multiple zeros using a class of quartically convergent methods. Alex. Eng. J. 2013, 52, 531–541. [Google Scholar] [CrossRef]
- Chun, C.; Neta, B. Comparative study of eighth order methods for finding simple roots of nonlinear equations. Numer. Algorithms 2017, 74, 1169–1201. [Google Scholar] [CrossRef]
- Cordero, A.; Torresgrosa, J.R.; Vassileva, M.P. Three-step iterative methods with optimal eighth-order convergence. J. Comput. Appl. Math. 2011, 235, 3189–3194. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I. A uniparametric family of three-step eighth-order multipoint iterative methods for simple roots. Appl. Math. Lett. 2011, 24, 929–935. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X. Eighth-order methods with high efficiency index for solving nonlinear equations. Appl. Math. Comput. 2010, 15, 3449–3454. [Google Scholar] [CrossRef]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint methods for solving nonlinear equations: A survey. Appl. Math. Comput. 2014, 226, 635–660. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. A new family of optimal eighth order methods with dynamics for nonlinear equations. Appl. Math. Comput. 2016, 273, 924–933. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative Methods for the Solution of Equations; Chelsea Publishing Company: Chelsea, VT, USA, 1982. [Google Scholar]
- Maroju, P.; Behl, R.; Motsa, S.S. Some novel and optimal families of King’s method with eighth and sixteenth-order of convergence. J. Comput. Appl. Math. 2017, 318, 136–148. [Google Scholar] [CrossRef]
- Sharma, J.R.; Argyros, I.K.; Kumar, D. On a general class of optimal order multipoint methods for solving nonlinear equations. J. Math. Anal. Appl. 2017, 449, 994–1014. [Google Scholar] [CrossRef]
- Li, S.G.; Cheng, L.Z.; Neta, B. Some fourth-order nonliear solvers with closed formulae for multiple roots. Comput. Math. Appl. 2010, 59, 126–135. [Google Scholar] [CrossRef]
- Liu, B.; Zhou, X. A new family of fourth-order methods for mulltiple roots of nonlinear equations. Nonlinear Anal. Model. Contral 2013, 18, 143–152. [Google Scholar] [CrossRef]
- Magreñán, A.A.; Cordero, A.; Gitiérrez, J.M.; Torregrosa, J.R. Real qualitative behavior of a fourth-order family of iterative methods by using the convergence plane. Math. Comput. Simulat. 2014, 105, 49–61. [Google Scholar] [CrossRef]
- Magreñán, A.A. Different anomalies in a Jarratt family of iterative root-finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar] [CrossRef]
- Geum, Y.H. Study on the dynamical analysis of a family of third order multiple-zero finders. Eur. J. Pure Appl. Math. 2023, 16, 2775–2785. [Google Scholar] [CrossRef]
- Neta, B.; Scott, N.; Chun, C. Basins of attractors for various methods for multiple root. Appl. Math. Comput. 2012, 218, 5043–5066. [Google Scholar] [CrossRef]
- Neta, B.; Chun, C. On a family of Laguerre methods to find multiple roots of nonlinear equations. Appl. Math. Comput. 2013, 219, 10987–11004. [Google Scholar] [CrossRef]
- Neta, B.; Johnson, A.N. High order nonliear solver for multiple roots. Comput. Math. Appl. 2008, 55, 2012–2017. [Google Scholar] [CrossRef]
- Neta, B. Extension of Murakami’s high order nonlinear solver to multiple roots. Int. J. Comput. Math. 2010, 8, 1023–1031. [Google Scholar] [CrossRef]
- Neta, B.; Chun, C.; Scott, M. Basins of attraction for optimal eighth order methods to find simple roots of nonlinear equations. Appl. Math. Comput. 2014, 227, 567–592. [Google Scholar] [CrossRef]
- Neta, B.; Chun, C. Basins of attraction for several optimal fourth order methods for multiple roots. Math. Comput. Simul. 2014, 103, 39–59. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. A class of two-point sixth-order multiple-zero finders of modified double-Newton type and their dynamics. Appl. Math. Comput. 2015, 270, 387–400. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. A sixth-order family of three-point modified Newton-like multiple-root finders and the dynamics behind their extraneous fixed points. Appl. Math. Comput. 2016, 283, 120–140. [Google Scholar] [CrossRef]
- Wolfram, S. The Mathematica Book, 5th ed.; Wolfram Media: Champaign, IL, USA, 2003. [Google Scholar]
- Fournier, R.L. Basic Transport Phenomena in Biomedical Engineering; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Deng, J.J.; Chiang, H.D. Convergence Region of Newton Iterative Power Flow Method: Numerical Studies. J. Appl. Math. 2013, 2013, 509496. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}