1. Introduction
Numerous scientific and engineering disciplines rely heavily on fractional calculus, including economics [
1], viscoelasticity [
2], and hydrology [
3]. Many phenomena that arise in the different fields of applied sciences can be modeled by fractional differential equations (FDEs), so studies regarding these types of equations are important. Because explicit analytic solutions are often not obtainable for these equations, approximate techniques based on numerical algorithms are often required. For examples of articles concerned with different numerical methods for solving FDEs, see, for example, [
4,
5,
6,
7,
8,
9]. Different multi-term FDEs are used to model many models that arise in many domains, such as rheology and mechanical models; for example, see [
10]. A number of articles focus on dealing with these FDEs because of how crucial they are. Spectral methods were heavily relied upon in order to solve these problems. For example, the authors in [
11] established an operational matrix of fractional derivatives of Fibonacci polynomials in the Caputo sense, and they employed them to treat some types of muti-type FDEs. Some other techniques were utilized to treat multi-term FDEs. For example, in [
12], the authors followed a wavelet approach to treat certain types of multi-term FDEs. Two numerical algorithms were utilized in [
13] to treat multi-term fractional diffusion-wave equations. In [
14], the authors followed certain difference schemes for treating the time multi-term fractional wave equation.
It is possible to categorize the numerical methods used for differential equations into local and global categories. In contrast to the spectral method, which takes a more global approach, the finite-difference and finite-element approaches are founded on locally relevant arguments. In reality, problems with complex geometries are particularly well-suited to finite-element methods, while spectral methods can offer greater accuracy. There are three main types of spectral methods used to solve the various integral and differential equations that were considered. For the tau and Galerkin spectral methods, we select two sets of basis functions, respectively referred to as “trial” and “test” functions. When employing the Galerkin approach, we select trial functions so that all of them verify the underlying conditions. In this case, the trial functions are the same as the test functions. (see, for example, [
15,
16,
17]). In contrast, the tau method allows for flexibility in selecting both of the basis functions. Based on this comparison, the tau method appears to be more flexible than the Galerkin approach (see, for example, [
18,
19]). Of all the spectral approaches, the collocation approach seems to be the most used for any differential equation. For example, it is used to solve the fourth-order BVPs (see, [
20]). The author in [
21] applied two schemes based on the Fibonacci operational matrix to treat the nonlinear fractional Klein–Gordon equation. The author in [
22] employed the fractional-order shifted Legendre collocation method for a type of fractional Fredholm integro-differential equations. Another type of FDEs is treated using the implicit wavelet collocation method in [
23]).
Chebyshev polynomials were defined nearly a century ago by the Russian mathematician “Chebyshev”. However, Lanczos, a pioneer in the field of numerical mathematics, rediscovered their importance for practical computation some thirty years ago. The introduction of the digital computer emphasized this advancement even more. Of the various sets of orthogonal polynomials, the Chebyshev polynomials have a long history because they have a trigonometric representation. These polynomials are regarded as special Jacobi polynomials as well. There are four distinct Chebyshev polynomials in Jacobi polynomials. All of these kinds can be represented trigonometrically, which is advantageous for using them in various applications. They play a great part in numerical analysis and approximation theory. The first and second kinds are most frequently used in treating different types of differential equations (see, for instance, [
24]). The third and fourth kinds, in addition, were also used in a variety of applications. They were employed in [
25] to treat the non-linear Lane–Emden-type equations. In addition, they were utilized in [
26] to obtain a numerical solution for multi-term variable order FEDs using the shifted third-kind Chebyshev polynomials. Recently, the two types of Chebyshev polynomials, called Chebyshev polynomials of the fifth and sixth kinds, were utilized to treat several types of differential equations. For instance, the fifth-kind Chebyshev polynomials were employed in [
27] to treat a multi-term variable-order time-fractional diffusion-wave equation. In addition, Abd-Elhameed in [
28] derived new expressions for the high-order derivatives of the sixth-kind Chebyshev polynomials and utilized them to treat the non-linear one-dimensional Burgers’ equation.
Numerous theoretical and practical investigations concerning different generalized and modified polynomials have been carried out. Regarding the modified and generalized polynomials of Chebyshev polynomials, the authors in [
29] introduced certain generalized shifted Chebyshev polynomials. In addition, they employed them to handle fractional optimal control problems. A type of multi-dimensional Chebyshev polynomials is introduced in [
30]. Another type of generalized second-kind Chebyshev polynomials is introduced in [
31]. The authors in [
32] established some new formulas for a class of polynomials that generalizes the third-kind Chebyshev polynomials class. In addition, they employed this class of polynomials to treat certain types of even-order BVPs. The authors in [
33,
34] handled some BVPs and IVP using the Chebyshev polynomials’ first derivative.
This paper is dedicated to introducing a type of orthogonal generalized Chebyshev polynomials of the first kind. Their shifted polynomials are also introduced. Aiming to employ these polynomials from a practical point of view, some fundamental properties of the shifted polynomials will be established. More precisely, the orthogonality relation, power form and inversion formulas of these polynomials will be also found in simple forms that are free of any hypergeometric forms. This type of polynomial will be employed for treating multi-term FDEs.
We believe that the following two issues account for the novelty of the contribution in this paper:
The above two reasons, of course, motivate us to investigate this kind of generalized Chebyshev polynomial both theoretically and practically.
This paper has the following structure: The next section presents some preliminary information involving an overview of certain polynomials that involve five parameters along with some properties of fractional calculus. A new type of generalized polynomials of the first kind and their shifted ones is introduced in
Section 3. The proposed numerical algorithm for treating the multi-term FDEs is proposed in
Section 4. Numerical experiments are displayed in
Section 5 to validate the efficiency and applicability of our proposed algorithm. Finally, the conclusion is presented in
Section 6.
5. Illustrative Problems and Comparisons
This section is confined to testing our proposed algorithm. For this purpose, we will present four numerical examples accompanied by comparisons with some other techniques in the literature to demonstrate the efficiency and high accuracy of our proposed numerical algorithm.
Example 1. Consider a composite fractional oscillation equation that immerses in a Newtonian fluid [41,42]:The exact solution of (34) is: Talaei and Asgar [
41] and Chen et al. [
42] solved numerically this problem. In [
41], the authors suggested an operational approach based on the Chelyshkov-collocation spectral method (CCSM) for the numerical solution of (
34), while the authors in [
42] applied the Haar wavelets method (HWM) for the numerical treatment of (
34). The
and
-errors of our presented method for different values of
N with
and
are shown in
Table 1. Furthermore, our results are compared in
Table 2 with those obtained by [
41] and [
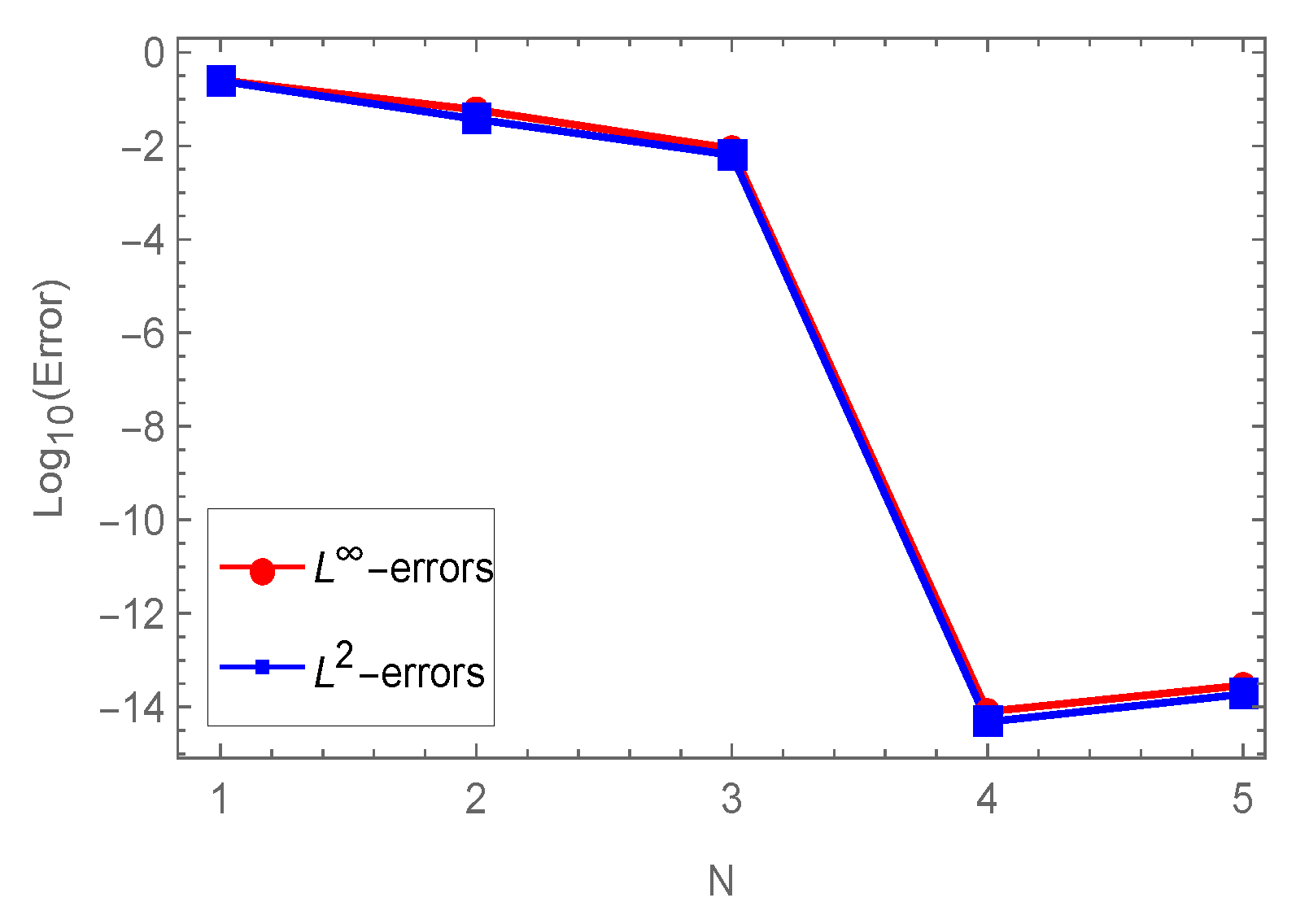
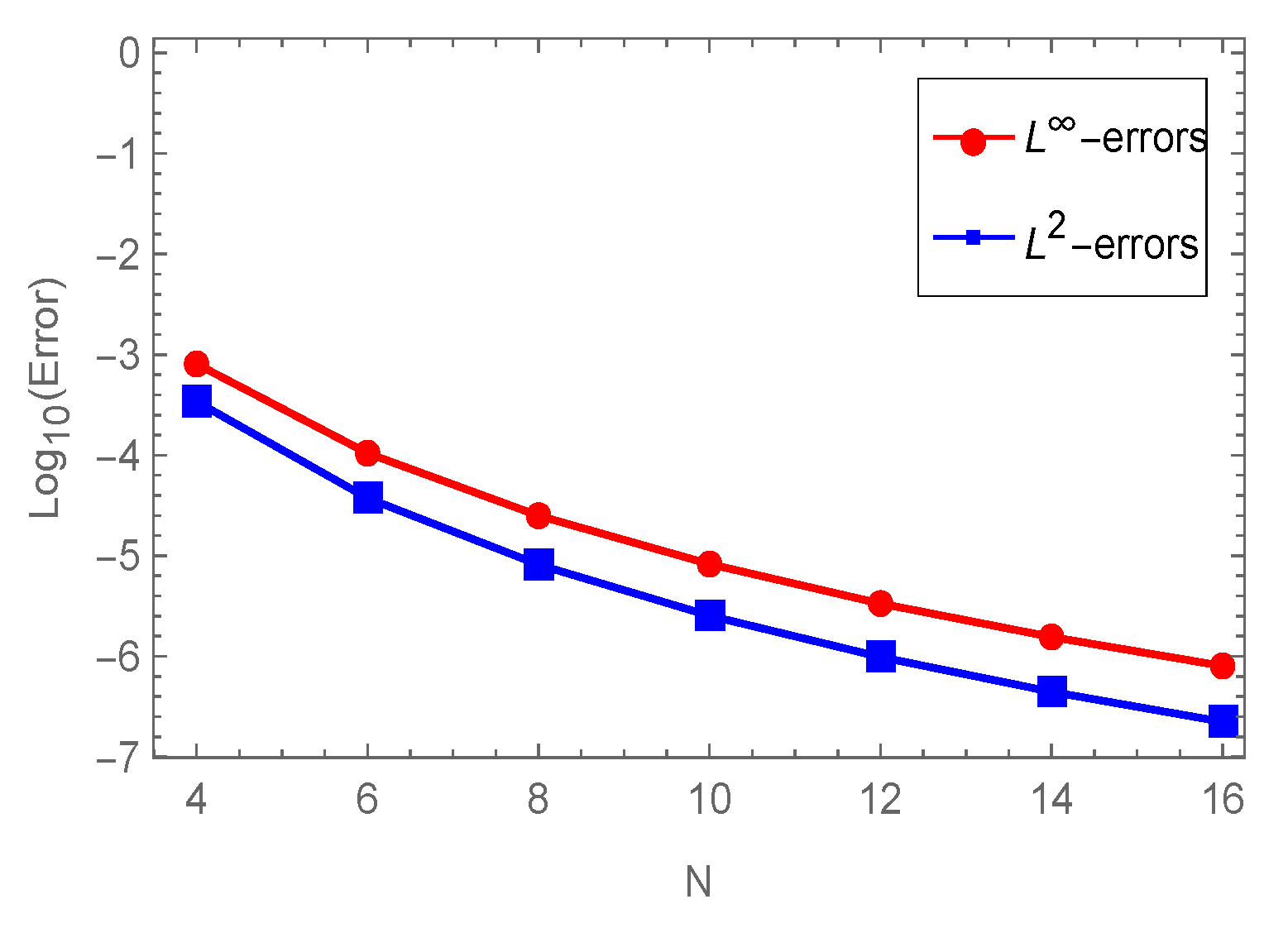
42]. The results of this table ensure the superiority of our method when compared with the other two methods. Additionally,
Figure 1 plots the maximum absolute error (MAE) of the solutions resulting from the application of our proposed algorithm for
and
, while
Figure 2 displays the
and
of our proposed algorithm for the case corresponds to:
and
with various values of
N.
Remark 4. From the data in Table 2, we can infer that the standard Chebyshev polynomials of the first kind are not the best approximations among the various classes of shifted polynomials . This demonstrates the significance of our generalization to the first kind of Chebyshev polynomials and their shifted ones, and it also demonstrates the impact of the parameter b that occurs in the shifted polynomials. Example 2. Consider the following FDE [43]:in which is the exact solution. Several methods have been developed to treat numerically this problem. Bonab and Javidi [
43] proposed some explicit methods based on the fractional backward differentiation method (FBDM) of order three for the numerical solution of the current problem. We applied our algorithm for obtaining the numerical solution to this problem. In
Table 3, the
-errors resulting from that application of our algorithm are presented for the case corresponding to
and
with distinct
b. Furthermore,
Table 4 gives a comparison of
-errors resulting from our algorithm for
and
for
with the FBDM that developed in [
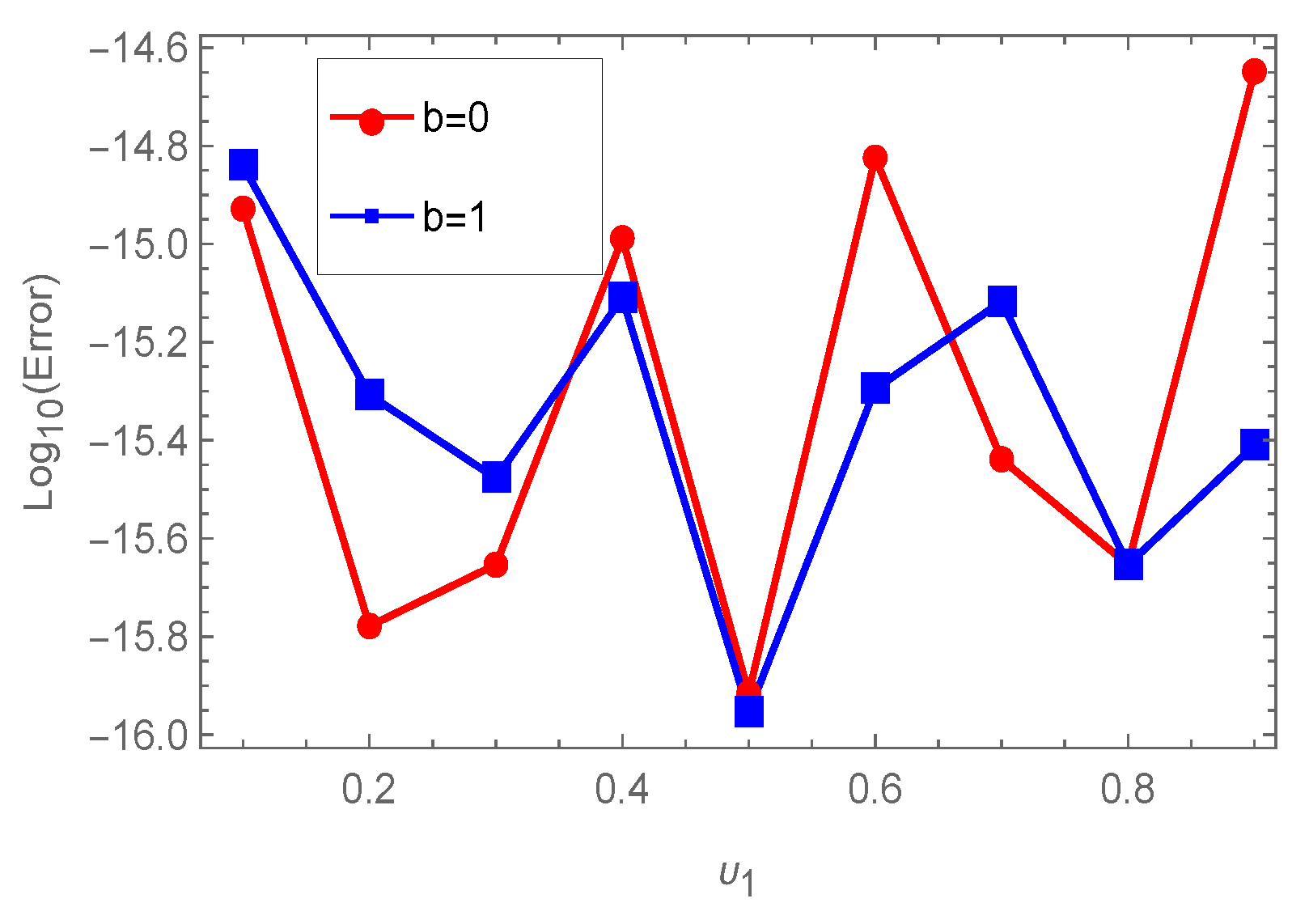
43] (h is the mesh size). Furthermore, to illustrate the influence of the parameter
b, we compare in
Figure 3 the resulting
of our algorithm for
and
,
with distinct
.
Figure 4 and
Figure 5 give the MAE of
of our algorithm at respectively:
,
and
and
.
Example 3. Consider the following FDE [44]:exact solution . Table 5 displays a comparison of
- and
-errors of our algorithm at
and
with distinct
b, while
Table 6 compares
-errors of our algorithm for
and
with the Tau method applied in [
44], which were based using Chebyshev and Legendre namely, “Legendre–Gauss–Lobatto (LGL) points” and “Chebyshev–Gauss–Lobatto (CGL) points” by the approximate solution of degree
M.
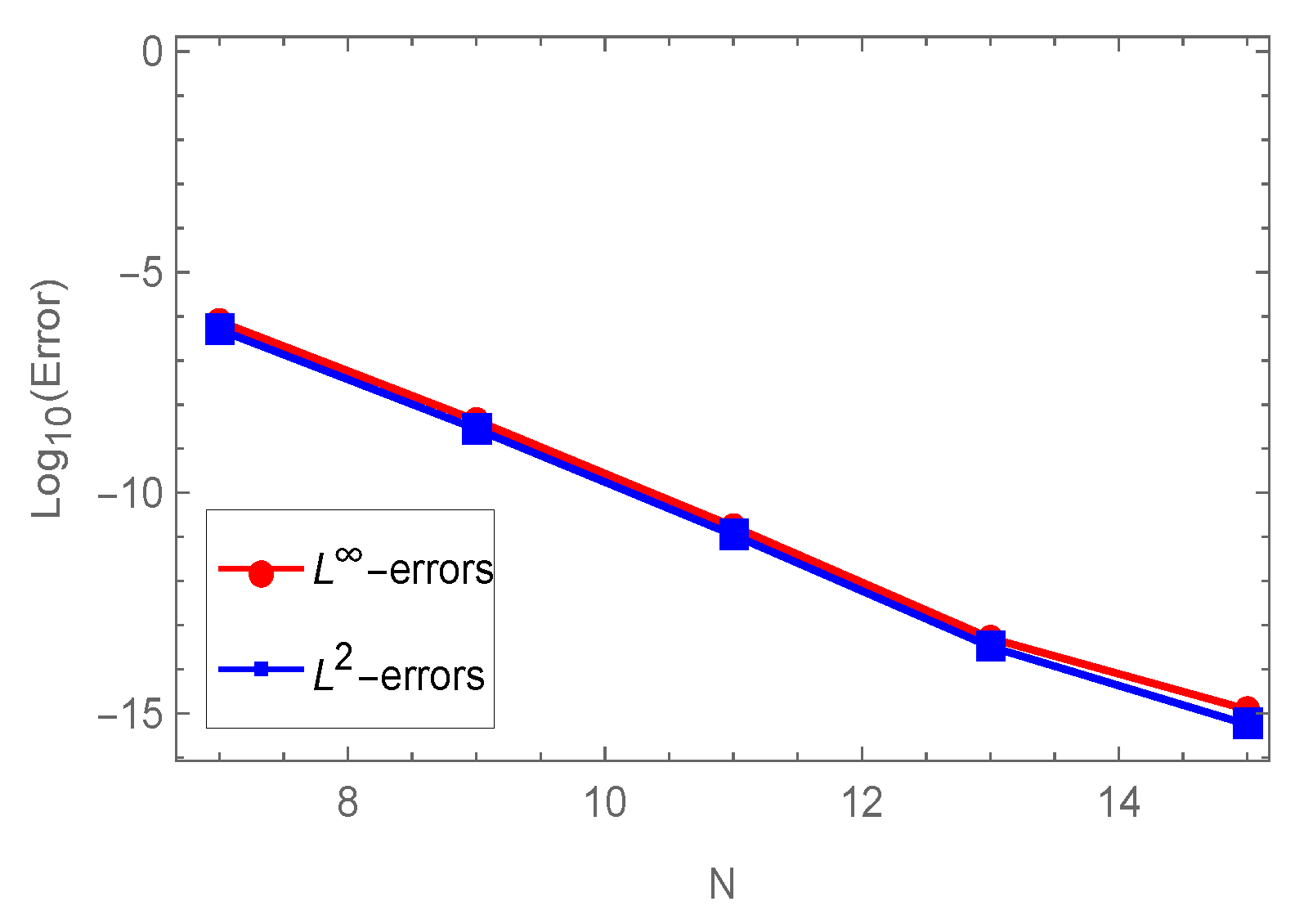
Figure 6 plots the
and
resulted from the application of our algorithm at
and
with distinct
N.
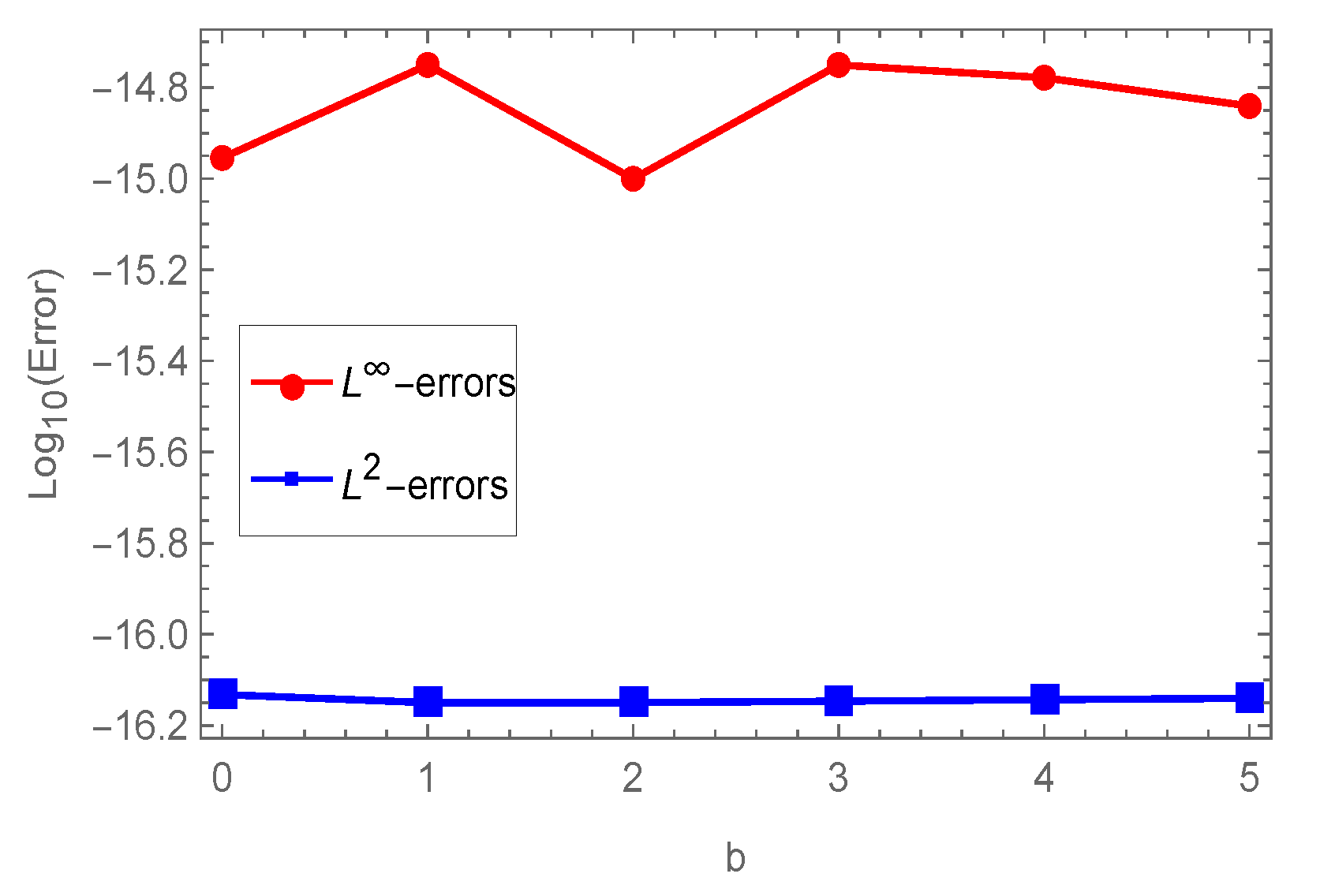
Figure 7 displays the
and
of our algorithm at
and
with distinct
b.
Figure 8 shows the MAE of
of our proposed algorithm for
and
with
(figure at left) and
(figure at right).
Example 4. Consider the following linear initial value problem [41]:with the initial condition The exact solution of this problem is
Table 7 compares the
- and
-errors of our algorithm at
and
with distinct
b, while
Table 8 gives a comparison of
- and
-errors of our algorithm for
and
with the CCSM that proposed in [
41] by the approximate solution of degree
M.
Figure 8 displays the MAE of
of our algorithm for
and
with
(figure at left) and
(figure at right).
Figure 9 displays the
and
of our algorithm at
and
with distinct
N.
Figure 10 describes the
and
of our algorithm at
and
with distinct
b. Finally,
Figure 11 displays the MAE of
of our algorithm for
and
with
(figure at left) and
(figure at right).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}