Abstract
The study of fractional linear time-invariant (LTI) systems has been an area of active research over the past thirty years. Results indicate that such systems are becoming important in the representation of certain types of dynamical behavior in biology and engineering. Several methods have been developed for the representation, identification, and control of fractional LTI systems. The primary purpose of this paper is to introduce a new approach to their control. Its principal contribution is the transformation of a fractional LTI system into one without fractional terms (standard LTI system) using feedback and feedforward compensation. While the former may be quite difficult to control, tools widely available in linear systems theory may be used to control the latter. Transformation of a fractional system into a standard one requires compensators with fractional transfer functions. It is shown, using research results from the past two decades, that such functions can be realized using hardware and software subsystems. The authors demonstrate, using an example, that better control performance is possible with the new method when compared to current ones that are most common in the research literature. Robustness in the presence of noise and model uncertainties is also studied for the new method and currently available ones. Simulation results presented illustrate improvements achievable in control robustness with the new method.
1. Introduction
The concept of General Systems Theory is attributed to Ludwig von Bertalanffy (von Assche et al. [1]), who lived in the first part of the twentieth century. Today, a general system is considered to be a collection of components or subsystems connected together to achieve an overall objective. Examples are ubiquitous and include biological, psychological, engineering, economic, political, and social systems. For over a century, systems have been represented by ordinary differential equations (ODEs) of finite integer orders (referred to as standard systems). A subset of these, described by ODEs with constant coefficients, are called standard linear time-invariant (LTI) systems. The application of the Laplace transforms to represent such a system in the complex domain, understanding its stability and transient behavior using the poles and zeros of its transfer function, and the modification of its responses to inputs using compensation are all well known.
This paper deals with fractional LTI systems, which may be composed by adding terms that involve fractional order derivatives to standard LTI systems. A very brief introduction to fractional order derivatives and fractional LTI systems is provided in Appendix A. It is seen that while the Laplace transform can be applied to such systems as well, the determination of the poles and zeros of their transfer functions, analysis of their stability and transient behavior, and the design of closed-loop behaviors are poorly understood.
It is the authors’ opinion that fractional LTI systems are gaining importance in the representation of certain types of dynamical behavior in many practical applications [2]. This is particularly the case in systems that include the viscoelasticity of soft (biological and synthetic) materials, the electrical impedance of polymers and biological tissue, and the models that involve spatial heterogeneity (e.g., macro-economics, population dynamics, and the spread of an epidemic/pandemic) or temporal heterogeneity (e.g., systems with memory). Consequently, advances in the study of fractional LTI systems can pave the way towards a new generation of algorithms and devices (adaptive dampers, mechanical ventilators, pacemakers, and prosthetic devices), enable the development of better economic and population models for forecasting, and can assist in gaining a better insight into how to contain the spread of epidemics and pandemics.
1.1. Focus of the Paper
In systems theory, the identification of a system, its interpretation, and its control are all of interest. The authors assume that fractional LTI models of physical systems of interest are available and focus their attention in this paper on the selection of compensators that enable the outputs of such systems to track input signals specified by a designer. Four common techniques used for the control of fractional LTI systems are surveyed, and a new method called “Transform and Control” is introduced. The latter uses feedback and feedforward compensation to transform a fractional LTI system into a standard one and then controls the transformed system using well-established tools in linear systems theory. As seen in the following sections, the first step requires the use of compensators that contain terms involving fractional powers of the complex variable . It is shown that such terms exist, are causal, and can be realized in practice using special-purpose hardware or software subsystems.
1.2. Primary Contributions of the Paper
In contrast with standard LTI systems, which are represented in the complex domain using rational transfer functions, fractional ones require expressions that contain terms with fractional powers of . Approximate representations of such systems can be considered using rational transfer functions of much higher order. The interpretation, analysis, and control of such systems, in general, can be extremely challenging. The primary contributions of this paper can be summarized as shown below:
- i.
- While a fractional system may be complex to control, it is straightforward to perform with the new method once it has been transformed into a standard system.
- ii.
- The closed-loop response of a fractional system controlled using the new method can always be represented by a standard one. This significantly simplifies the design of closed-loop behaviors desired from a fractional system.
- iii.
- The denominator of the transfer function that represents the closed-loop behavior of a fractional system controlled using the new method will always be of order , where and and are the largest values of integer and fractional powers of respectively, in the denominator of the plant model.
1.3. Organization of the Paper
The paper is organized as follows. Section 2 briefly presents the practical importance of fractional LTI systems, and it can be seen that such models are quite prevalent across engineering and biology. Section 3 contains the description of a practical example considered for analysis in the paper. Section 4 summarizes four techniques currently available and most commonly used for controlling fractional LTI systems. Section 5 introduces the Transform and Control method (Appendix B applies it to simple systems of orders between one and two). Section 6 uses all methods to control the system described in Section 3 and compares their closed-loop responses to a unit step and a periodic input. Responses to a randomized input and robustness to control noise and model uncertainties are studied in Section 7. Section 8 addresses the realization of fractional terms in the compensators that transform a fractional LTI system into a standard one. Section 9 discusses the generation of control signals necessary to account for arbitrary initial conditions, and the paper concludes with a short discussion of how the new method can advance the theory and practice of the control of fractional LTI systems.
2. Importance of Fractional LTI Systems
In the last century, systems theory has made important contributions related to the representation, identification, interpretation, analysis, and control of complex dynamical systems using applied mathematics. Such advances have generally arisen from a need to solve practical problems in engineering, biology, economics, and other areas.
The first practical application of a fractional model was given by Abel in 1881 [3] in his description of the tautochrone problem. Today, they can be seen in fields as diverse as engineering, economics, the life sciences, epidemiology, and food sciences. Six specific applications that have benefitted from the use of fractional LTI models were discussed in detail in [2] by the authors (and listed below), along with other use cases. The application of standard models had been typical for the representation of dynamical behaviors in such applications. However, it was seen in each of the six cases that a fractional one more accurately represented the corresponding behavior. Table 1 below presents both the traditional model and the fractional LTI model used in these six applications.
- i.
- Convective cooling of liquids (Das in [4]),
- ii.
- Synthetic polymer viscoelasticity (Bagley, Torvik in [5]),
- iii.
- Lung viscoelasticity (Dai et al. in [6]),
- iv.
- Seismic isolation of buildings (Makris, Constantinou in [7]),
- v.
- Supercapacitance (Boskovic et al. in [8]), and
- vi.
- Biological tissue impedance (Magin in [9]).

Table 1.
Fractional Transfer Functions in Practical Applications.
Table 1.
Fractional Transfer Functions in Practical Applications.
| No. | Application | ||
|---|---|---|---|
| 1 | Convective Cooling | ||
| 2 | Polymer Viscoelasticity | ||
| 3 | Lung Viscoelasticity | ||
| 4 | Seismic Isolation | ||
| 5 | Supercapacitance | ||
| 6 | Biological Tissue Impedance |
The inverse transform of the fractional transfer functions used for applications 1–3 and its differences from the standard exponential function are discussed in Appendix A. The inverse transform of the fourth application can be derived from first principles and is a linear combination of and . Inverse transforms for applications 5 and 6 are more complex and involve the use of special functions.
Fractional systems theory is concerned with the identification, interpretation, analysis, and control of dynamical behavior whose representation involves the use of fractional order derivatives. While significant advances have been made in the last thirty years, it is the authors’ opinion that the mainstreaming of their study in systems theory will need formal methods that enable a more general treatment of such systems.
Importance of Fractional Control
The study of fractional systems can lead to new control applications. For example, as discussed in [7], seismic isolation of buildings requires the design of damping devices that are capable of dissipating significant amounts of energy in a relatively short time period. This has led to the use of heavy oils and gels in such devices and, in turn, a need for viscoelastic models containing fractional order derivatives that predict their dynamical behavior. As noted by Rabiee and Chae [10] (and other similar works), high damping is more effective for the ground motions seen during long-period earthquakes, while low damping is better suited for short-period ones. Given the variety of ground motions during seismic events (e.g., Shahi and Baker [11] describe the 1979 Imperial Valley earthquake as a pulse ground motion that lasted less than 10 s and contrast it with the sustained non-pulse motions of the 1971 San Fernando earthquake that lasted 30 s), it can be argued that seismic isolation devices whose viscoelasticity can be matched to ground motions will be more effective in protecting buildings than ones that are fixed.
3. The Control Problem
- System:
It is assumed that the system considered for analysis is known (shown as a transfer function in Equation (1) below). Uncertainties may be present in its coefficients and exponents.
Equation (1) contains one fractional term between zero and one and one between one and two and is one of the most general among the examples considered in the research literature. Additionally, the dynamical behavior represented by the system in Equation (1) includes those seen in seismic isolation of buildings [12] and discharge characteristics of electrochemical storage devices or batteries (e.g., [13]).
- Assumptions:
- i.
- Poles (fractional or simple) of the system in Equation (1) can be stable or unstable. However, its zeros are stable. This assumption will be relaxed in future work.
- ii.
- The system is fully observable and controllable. Those that are only partially observable and controllable will be considered in future work.
- Control Problem:
- iii.
- The design of feedback and feedforward compensators required for tracking (a) a unit step and (b) a periodic input is considered (inputs denoted by ). The closed-loop transfer function in each case has the form shown in the equation below (where, ):
- iv.
- The response of a fractional LTI system to is (this is discussed in some detail in Appendix A). However, contrary to integer order systems, is not a polynomial but an expression containing fractional powers of . Fractional systems, therefore, cannot be studied in general using frequency responses. Consequently, closed-loop responses to a randomized periodic input are investigated to assess the generalizability of the compensators designed for iii (b).
- v.
- And finally, the robustness of control designs to input noise and uncertainties in the coefficients and exponents of the system in Equation (1) is presented.
Simulation Tools Used
A summary of the tools currently available in MATLAB® and used to generate the results presented in the paper is provided for completeness. Simulations were conducted using the FOMCON and FOTF toolboxes available in MATLAB®. The companion SW available with the purchase of books on fractional systems (e.g., [14]) may also be viewed as a source of support for such simulations. The design of compensators for currently available methods was an iterative process that used the Monte-Carlo toolkit in MATLAB® for selecting control gains. The authors also note that the CRONE® toolbox may be used for the identification of fractional LTI systems. The system thus identified will be represented as a lead-lag filter (ref. [15]).
4. Currently Available Methods for Controlling Fractional LTI Systems
The study of fractional LTI systems over the past thirty years has yielded numerous methods for their identification, interpretation, analysis, and control. In contrast with standard linear systems, however, insights into their behavior are not evident in general.
In this section, the authors focus only on the last topic, namely, the control of fractional LTI systems. Four of the most commonly used methods are discussed here, along with the advantages and disadvantages inherent in their application to controlling fractional systems. Simulation results that describe the control of the system described in Section 3 using methods currently available are presented in Section 6.
The four techniques currently in use for the control of fractional LTI systems are summarized below. Readers are referred to the papers by Petras [16], Li et al. [17], and Podlubny [18]; the books by Xue [14] and Vinagre et al. [19]; and a recent technical report by the authors [20] for more detailed discussions on the topic. The extension of such methods to time-delay fractional systems may be found in the paper by Birs [21]. Stability analysis using linear matrix inequality (LMI) techniques was studied in a paper by Sabatier et al. [22], and advances in the robust control of fractional systems are described in the monograph by Padula et al. [23]. New results related to non-commensurate systems may be found in the paper by Ortigueira and Bengochea [24]. The article by Aguila-Camacho et al. [25] discusses the use of the Lyapunov theory to analyze the stability of fractional systems.
Description of Methods Currently Available
- A.
- Technique 1: Approximate terms involving fractional powers ofusing rational functions. In this method, a standard LTI system approximates the dynamical behavior of a fractional one, which in turn permits the use of methods available for standard systems.
- ○
- Approximations commonly used are based on the algorithms proposed by Carlson and Halijak [26], Oustaloup [15], and Matsuda and Fujii [27]. For example, Krishna shows that can be approximated using a rational function of 4th or 5th degree [28] using such methods.
- ○
- Advantages: The technique can be applied to transfer functions that contain terms with real powers (rational or irrational) of . Both open and closed-loop behaviors of the system can be represented using rational transfer functions.
- ○
- Disadvantages: There are two primary disadvantages to this approach. The first is that approximations using rational transfer functions will, in general, be of a much higher order than the original fractional system. The second is that series connections of rational approximations may lead to incorrect models. For example, . Such limitations could narrow the general applicability of rational approximations.
- B.
- Technique 2: Convert transfer functions that have a common fractional power of () into a polynomial expressed in terms of a new variable. Methods available for standard systems can then be applied to control these systems in the new coordinates (-plane), and results can be transferred back to the -plane.
- ○
- This technique was developed for commensurate systems () and can be used for any . The transfer of control design from the -plane to the -plane is based on the stability result originally derived by Matignon [29] and generalized to fractional LTI systems (e.g., [22]).
- ○
- Advantages: Once the system is converted to the -plane, techniques available for standard systems can be used to study the stability properties of the original fractional ones and to modify their closed-loop behaviors.
- ○
- Disadvantages: This approach suffers from four distinct disadvantages.
- ▪
- First, it cannot be applied to non-commensurate systems (where the fractional power cannot be factored out).
- ▪
- Second, the control design for desired closed-loop behavior is not straightforward. While stability results carry over from -plane to the -plane, control performances may not. In fact, it is shown in Section 6 that good control performance in the -plane does not lead to a similar one in the -plane.
- ▪
- Third, the stability result derived in [29] is a sufficient condition based on the primary solution , and an extension of the De Moivre formula to non-integer exponents (). Together, these were used to argue that the system is unstable only in the cone , and suggest that a fractional system might enjoy an increased stability margin over its standard counterpart .
- -
- The more general formula for complex numbers, however, is , and can lead to roots with physical meaning in higher-order Riemannian sheets. For example, does not have a pole in the first sheet but does so in the second [30].
- -
- Further, is a unique solution only for or . Otherwise, there are multiple ones.
- ▪
- And finally, it is noted that the closed loop transfer function of the system will continue to retain fractional powers of .
- C.
- Technique 3: Extend Technique 2 to transfer functions with rational powers of by expressing them as fractions. They can then be controlled in the same manner as commensurate ones.
- ○
- This method was proposed by Petras [16]. It was shown there that the common term with rational powers is . Since this transfer function always has an order , ref. [16] Matignon’s results were once again applied to assert the carryover of stability properties from the - to the -plane.
- ○
- Advantages: This method allows any fractional system with rational exponents to be converted to the -plane. Since the technique is restricted to rational exponents, it allows the full use of the extended De Moivre formula.
- ○
- Disadvantages: This approach suffers from the same disadvantages as Technique 2 in terms of stability margins, control performances, and fractional terms in closed-loop transfer functions. In addition, depending on the value of the LCM, conversion from the -plane could lead to high-order functions in the -plane.
- D.
- Technique 4: Apply the control method, which uses a fractional derivative (instead of an ordinary one) and a fractional integral (instead of an ordinary one) in the control law.
- ○
- This method was proposed in 1999 by Podlubny for general fractional LTI systems [18]. It is noted that examples considered have generally been standard second-order systems with additional fractional terms.
- ○
- Advantages: This method extends the well-known PID control technique and can be used for the control of any fractional system represented by a transfer function with terms that have either rational or irrational powers of .
- ○
- Disadvantages: A simple method for the design of the fractional exponents and as well as the gains used in control is not available at present. In addition, the closed loop transfer function of the system will continue to contain fractional powers of .
The standard control architecture shown in Figure 1 below with feedback () and feedforward () compensation will be used for all four methods. Techniques 1 and 4 will have compensators designed directly in the -plane. In the other two cases, control designs will be performed in -plane first and then transferred to the -plane.
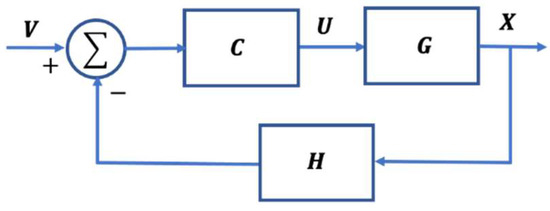
Figure 1.
Control Architecture for Control Simulations using Techniques 1–4.
5. Transform and Control: A New Method
In this section, a new method, called Transform and Control, is introduced. The basic ideas behind it are described below. Given a fractional system, where both and are represented using expressions with fractional powers of :
- i.
- Transform the fractional system into a standard one using feedback and feedforward compensation (, a rational transfer function. It is shown that this process involves the following two steps:
- a.
- Cancelation of the zeros of a fractional plant in the feedforward path. Since the paper only deals with systems that have stable zeros (a condition that will be relaxed in future work), this pole-zero cancelation step does not involve unstable poles in the feedforward controller. The realization of the transfer functions needed for the cancelation is discussed in Section 8.
- b.
- Transformation of the fractional poles of the system into simple poles using feedback. This step is quite different from pole-zero cancelation and may be thought of as being similar to pole placement in LTI systems theory.
- ii.
- With this step complete, control the transformed system () using widely available tools in linear systems theory to achieve desired closed-loop behavior.
The control architecture used for implementing both steps is shown in Figure 2 below. Feedback and feedforward compensation in the inner loop is used to initiate the transformation of . The compensation term in the outer loop is used to complete this step, after which is designed to achieve desired closed-loop behavior. The transformed system () is described by the expression below:
In the inner loop, fractional zeros in can be canceled with . is chosen so that contains only simple poles. This transformation step from could introduce new fractional zeros in . With the outer compensation terms, the closed loop transfer function is as shown below:
The fractional zeros in is canceled using . As the last step, is used for pole placement to achieve the desired closed-loop behavior.

Figure 2.
Transform and Control Architecture.
Figure 2.
Transform and Control Architecture.

The new method introduced here is applied to the following increasingly complex examples in Appendix B to illustrate how the transformation step is achieved:
- -
- System 1: , where . The system has a fractional pole at the origin.
- -
- System 2: , where . This moves the fractional pole to -.
- -
- System 3: , where . This adds a fractional zero at the origin.
- -
- System 4: , where . This moves the fractional zero to -.
- -
- System 5: , where and . This is a standard second-order system with additional fractional terms.
It is shown that the closed-loop behavior of Systems 1–4 (System 5) is represented using (), where (). Placement of the poles of the closed loop system is based on the response desired when it is subjected to either a unit step or the periodic input .
Note on the New Method: The step involved in the cancelation of the zeros of the plant model is consistent with the assumption stated before that has stable poles. The use of to cancel the fractional zeros in needs further study. From the results described in Appendix B, it appears that in each example, has stable poles. This notwithstanding, more formal treatment of the classes of fractional LTI systems that lend themselves to the new method is a topic of future research. This is also the case with the extension of the new method to deal with systems whose have unstable poles and systems that are not fully observable or controllable.
Multi-loop Control Considerations: The new method requires the use of an inner and an outer feedback loop. Design considerations for multi-loop control systems have been considered in linear systems theory over the past forty years (e.g., Grosdidier and Morari [31] and Lee and Edgar [32]). The new method proposed here may be considered a sequential loop closing method, in which the design objective of the inner loop is the transformation of the original fractional system into a standard one, and the objective of the outer is to achieve desired closed-loop behavior. The inter-dependencies between these loops, as well as the study of such interactions in more general multi-input multi-output fractional LTI systems, will be considered by the authors in future work.
Steps Involved in the Application of the New Method
A stepwise procedure for the design of and is presented below.
- Choose to change the fractional poles in to simple ones.
- Use to cancel fractional zeros in .
- Use to cancel fractional zeros in .
- Design to achieve desired closed-loop behavior.
The application of the procedure to System 4, as an example, is shown below.
Step 1: Choose . This cancels the fractional zeros of . ( must be true for the zero of the original plant to be stable).
Step 2: Move the fractional pole of to the origin (feedback term in ).
Step 3: Change the fractional pole at the origin to the simple pole (feedback term in ).
Step 4: Steps 1–3 transform . Choose to cancel the fractional zeros of (note that is stable).
Step 5: Choose . With this, the closed-loop transfer function is .
6. Control of the System in Section 3 with Currently Available and the New Methods
The system described in Equation (4) below is the one introduced in Section 3 with specific values of coefficients and exponents. It is used for comparing the control performance of all four techniques currently in use, as well as the new method.
It can be shown that the poles of this system are and . Therefore, it has a stable, simple pole at (, stable fractional pole at ( and an unstable one at . It is noted that is the two-parameter Mittag-Leffler function [33].
From a systems theoretic perspective, the authors consider the example in Equation (4) to be an ideal candidate for understanding how a standard second-order system that has been studied for nearly a century is impacted by fractional terms. From a practical point of view, it can be viewed as a very simple representation of the seismic isolation problem, where the building is a point mass and is protected by a device in which a spring-loaded piston (attached to the building) moves in a chamber filled with a fluid (the viscoelasticity of which is represented using the model proposed by Bagley and Torvik [34]). The model may also be used to describe the discharge characteristics of certain types of electrochemical storage devices (e.g., [13]).
6.1. Control Simulations
The control architecture in Figure 1 is used for Techniques 1–4. The one shown in Figure 2 is used for the new method. The control objectives considered in the paper are described below. In all cases, transient and steady-state behaviors are of interest.
- A.
- For step response, the objective is to have the system rapidly reach a steady state behavior of , where is small and is the settling time.
- B.
- For periodic inputs, convergence to is of interest.
- C.
- As stated before, frequency response techniques cannot be used to study the generalizability of control designs used for fractional LTI systems. Therefore, a randomized periodic input will be used instead. The input signal considered here oscillates at frequencies that are randomly selected from the bandwidth of the input in B.
- D.
- For robustness, controllers designed for periodic inputs will be subject to control noise and model uncertainty (both coefficients and exponents).
- Simulation results describe the responses of the closed-loop system to the following:
- i.
- Unit step input.
- ii.
- Periodic input (multiple low-frequency harmonics). The randomized signal will therefore be selected in bandwidth Hz.
6.2. Currently Available Methods
- Technique 1: The system in Equation (4) is controlled using the steps described below:
Step 1: Approximate in by the following fifth-order rational transfer function (Krishna [28]) and reconstruct the plant model using feedback, summation, and gains.
Step 2: With Step 1, the fractional system in Equation (3) is converted to an approximated standard one. In the control architecture shown in Figure 1, choose the following feedback and feedforward compensation terms:
- -
- and for Step.
- -
- and
- -
- for Periodic.
Simulation Results: Figure 3 and Figure 4 show the control performances achieved with Technique 1. It can be seen that:

Figure 3.
Response to a Step Input with Technique 1.
Figure 3.
Response to a Step Input with Technique 1.


Figure 4.
Response to the Periodic Input with Technique 1.
Figure 4.
Response to the Periodic Input with Technique 1.

Note on Control Design: The fifth-order rational approximation of results in a very high-order approximation of the fractional plant. Control designs presented above were the result of an iterative process that used Monte-Carlo simulations. A single design based on optimization techniques will be studied by the authors in future work.
- Techniques 2 and 3: Since the system in Equation (4) is commensurate, Techniques 2 and 3 are identical. Control of the system can be carried out as shown below:
Step 1: With , convert the system in Equation (4) into the standard one below:
Step 2: In the architecture shown in Figure 1, choose the following feedback and feedforward compensators:
- -
- and for Step.
- -
- and for Periodic.
Simulation Results: Figure 5 and Figure 6 show responses to step and periodic inputs in the new coordinate , defined as the state that corresponds to the plant . The response in Figure 5 (Figure 6) takes about 40 (200) seconds to converge to its steady-state behavior. Figure 7 and Figure 8 show responses to step and periodic inputs obtained by transferring the compensator designs ( and ) back to the -plane. In both cases, it is seen that significant differences exist in the control responses between and . Step response takes longer (160 s) to converge to the steady state of . However, it is seen that the steady-state error is significantly smaller in the -plane. Both transient and steady responses to the periodic input are far worse in the -plane than in the -plane.
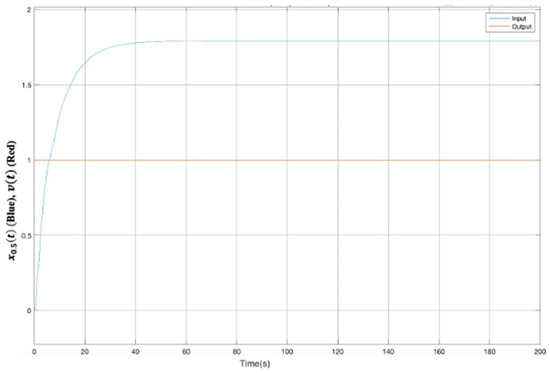
Figure 5.
Response to a Step Input in the -plane.
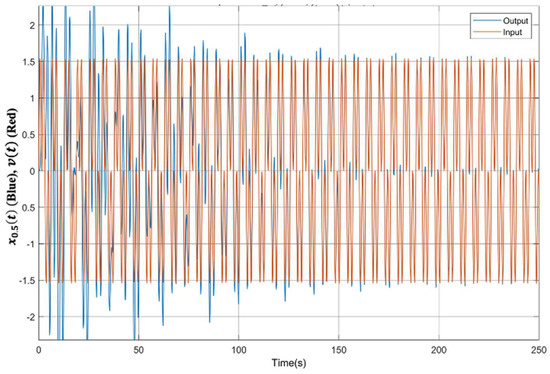
Figure 6.
Response to the Periodic Input in the -plane.
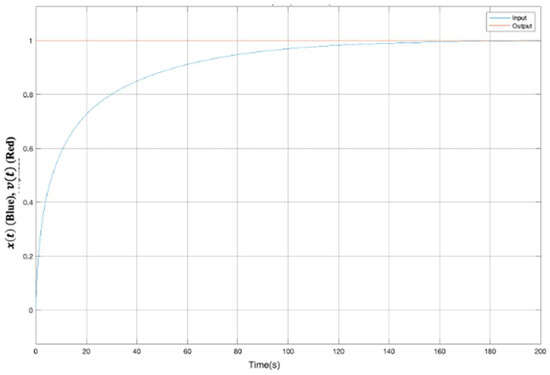
Figure 7.
Response to a Step Input with Techniques 2 and 3.
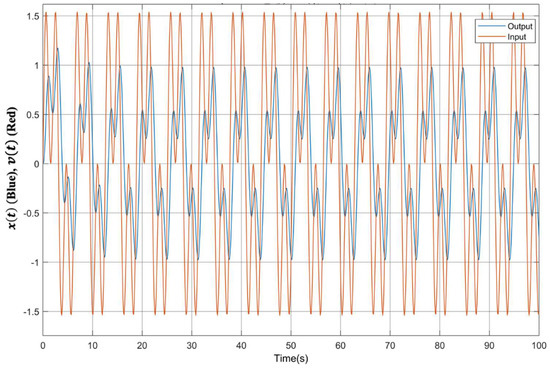
Figure 8.
Response to the Periodic Input with Techniques 2 and 3.
Note on Control Design: Initial simulations were conducted using control designs that exhibited good closed-loop responses to the step inputs in the -plane. However, this approach led to large steady-state errors in the -plane. The control performance presented here for step response is the result of an iterative process used to determine that control design in the -plane, which would deliver desired performance in the -plane. It is clear from Figure 5 and Figure 7 that poor response was needed in the -plane to achieve good closed-loop behavior.
- Technique 4: Figure 9 and Figure 10 show the results of control of the example system. The following compensation terms were selected for this method:
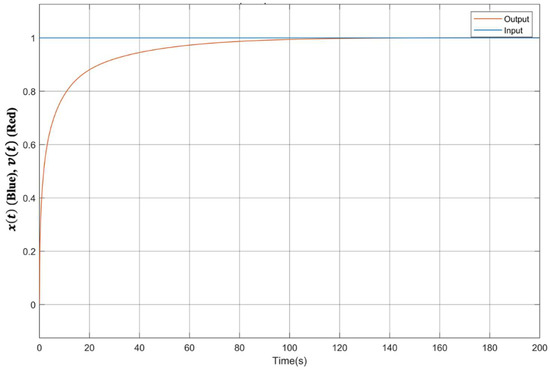 Figure 9. Response to Step Input with Technique 4.
Figure 9. Response to Step Input with Technique 4.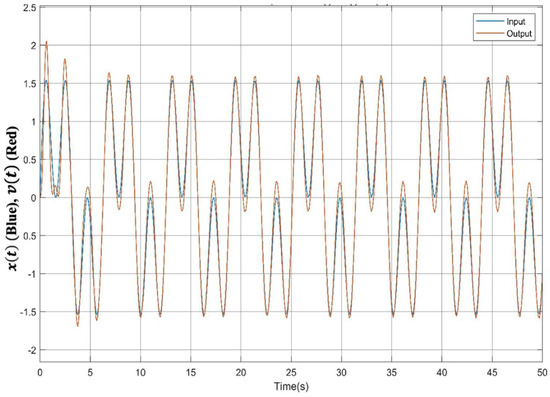 Figure 10. Response to the Periodic Input with Technique 4.
Figure 10. Response to the Periodic Input with Technique 4.- -
- and for Step Response.
- -
- and for Frequency Response.
Simulation Results: Good step response is seen in Figure 9. However, the system takes close to 100 s to converge. Figure 10 shows that the method has some difficulty tracking the input .
Note on Control Design: It was assumed that in the development of the feedback compensation. The control gains were chosen based on iterations performed using Monte-Carlo simulations. As noted in [35], analytical techniques for the selection of the fractional powers in control is not available at present.
6.3. The New Method
The feedback and feedforward compensation terms for the system in Equation (1) have been derived in Appendix B. The specific system chosen for simulations in Section 3 has , , , and . Inserting these into the corresponding compensator designs, the inner loop terms will be as shown below:
For canceling the fractional zeros introduced in as a result of the inner loop transformation, the following feedforward compensation is selected in the outer loop:
It is noted that a gain of has been introduced in to ensure appropriate amplitude response. The following selections of the outer loop feedforward and feedback compensation were made for closed-loop responses:
- -
- and for Step.
- -
- and for Periodic.
Simulation Results: Figure 11 and Figure 12 show the closed-loop behavior of the system in Section 3 controlled using the new method. For the former (latter), converge to steady state behavior occurs in a little over ten seconds (almost immediately).
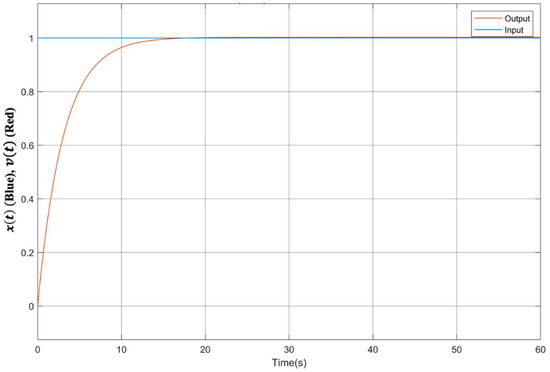
Figure 11.
Response to Step Input with Transform and Control.
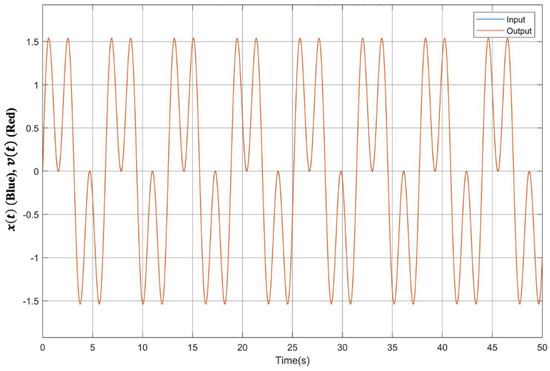
Figure 12.
Response to Periodic Input with Transform and Control.
6.4. Comparison of Closed Loop Responses
The following comparisons can be made between the methods:
- Closed Loop Responses to Step Input: Convergence to steady-state took many tens of seconds with all currently available methods. Of the four current techniques, control seemed to exhibit the best steady-state behavior. A reasonable steady-state behavior was seen with a rational approximation of the original fractional plant. Techniques 2 and 3 required a control design that exhibited significant steady-state error in the -plane in order to achieve a good response in the -plane. The new method converged rapidly to excellent steady-state behavior with just a gain in the outer feedback loop.
- Closed Loop Responses to Periodic Input: As with step response, convergence to steady-state with a periodic input took many tens of seconds with all currently available methods. The best steady-state behavior was seen with the use of Technique 1. However, a second-order compensator was required for the control performance. control seemed to exhibit reasonable tracking behavior for the component but had difficulties doing so for . Techniques 2 and 3 did not yield good tracking behavior. While control performance was reasonable after prolonged transients (200 s) in the -plane, it was poor in the -plane. The new method converged quickly to excellent steady-state behavior with a first-order outer loop feedback compensator.
- Relationship between Fractional Orders and Compensator Designs: The choice of and in the new method remains the same regardless of the actual values of the fractional terms in the original system. The latter only affected the compensation terms and chosen for the transformation of . For every pair, the transformed system, and the choice of and remained the same.
- Closed Loop Transfer Function: The closed-loop transfer function achieved with the new method for the example is always rational and of second order. With existing techniques, this is not the case. Technique 1 yields a fifth-order rational function. With Techniques 2, 3, and 4, the closed-loop transfer functions are not rational. In fact, they continue to require expressions that contain fractional powers of .
In summary, the closed-loop step responses of the new method exhibit far better convergence and smaller steady-state errors than those from currently available ones. The response to a low-frequency periodic input with the new method showed excellent steady-state tracking behavior with few transients. On the other hand, those with existing techniques showed significant transients in all cases and poor tracking behavior in most.
7. Generalizability of Control Designs and Control Robustness
In this section, the generalizability and robustness of the control designs described in Section 6 for periodic inputs are investigated by studying the corresponding closed-loop behaviors under the following conditions:
- i.
- Ability to track a periodic input with randomized frequencies between and Hertz, which is the frequency of the component of .
- Comment: It is well known that the Fourier components of the outputs of a standard LTI system will be identical to the ones present in the corresponding inputs. This is due to the fact that it is represented by a rational transfer function. In contrast, a fractional LTI system requires a transfer function with expressions that contain fractional powers of . Consequently, their analyses using frequency responses are not possible. The authors propose, therefore, the study of closed-loop responses to randomized periodic inputs to assess how generalizable control designs may be.
- ii.
- Closed-loop responses to a randomized periodic input and with control noise bandlimited to 250 Hz (Figure 13). The band limit selected here represents a frequency that is significantly higher than the one used for control designs.
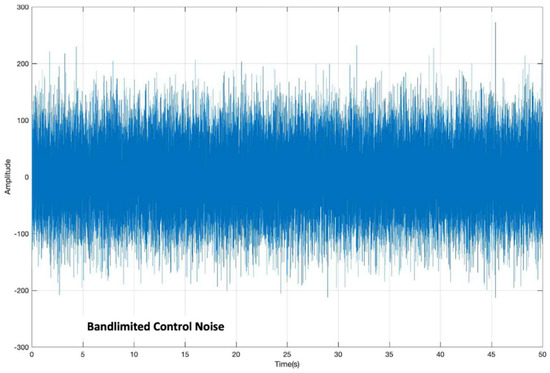 Figure 13. Bandlimited Control Noise.
Figure 13. Bandlimited Control Noise. - iii.
- Closed-loop responses to a randomized input, with control noise and uncertainties in both the coefficients and the fractional exponents of the system in Equation (4).
- Comment: For the purpose of studying the robustness to model uncertainties, the representation of the actual plant (denoted by ) is described as shown below:
- -
- It is assumed that both the estimated and actual plant models are represented by standard LTI systems of second order, with the additional fractional terms (i.e., the structure is the same as shown in Equation (4)).
- -
- Parameters of the estimated and actual models are related as follows: , where is the estimated value of , and is known (i.e., the uncertainty bound for each parameter is known).
- -
- It is assumed in this paper that , where is a random value between . Specifically, the system shown in Equation (5) below is used for the assessment of the robustness of all five control designs (the four currently available and the new method)
7.1. Control Analysis
The control architecture in Figure 1 (Figure 2) is used for Techniques 1–4 (the new method), and the control laws used are the ones designed previously for the (estimated) plant model in Equation (6):
- A.
- For randomized periodic inputs, is once again of interest.
- B.
- For robustness to noise, convergence to will be assessed with the noise signal Figure 13 added to the control input.
- C.
- For robustness to noise and uncertainties, noise is added to the input to the plant model in Equation (5) (to account for the differences between estimated and actual plant models), and convergence to will be assessed.
- Generation of Randomized Periodic Inputs
The randomized input is generated as shown below in Figure 14. The low pass filter used in Figure 14 has a roll-off at ~ Hertz. The signal shown in Figure 14 is a single instantiation of the method. It is noted that since a random number generator is used to drive the low pass filter, a different input waveform in the bandwidth is seen in the simulations presented in this section. No attempt was made to modify the randomized input automatically generated for any of the simulations. It is the authors’ opinion that this can provide a more general view of the performance of each control method under the study conditions, which in turn could serve to validate the comparative analysis.
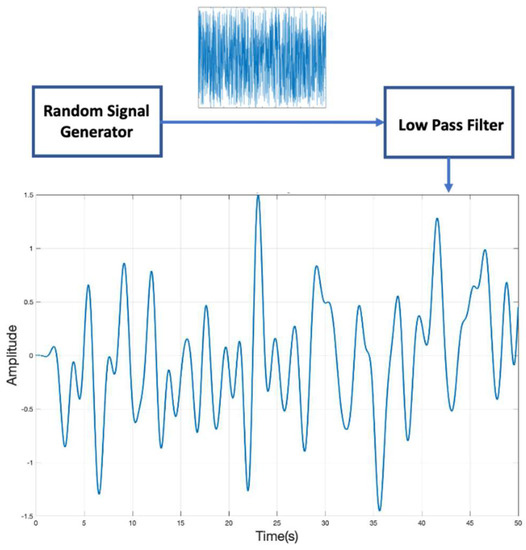
Figure 14.
Randomized Low-Frequency Signal Generation.
- Technique 1:
Simulation Results: Figure 15 shows the closed-loop response to the randomized periodic input, while Figure 16 and Figure 17 describe the robustness of the control designs. From the results, it appears that convergence to a neighborhood of the steady state cannot be achieved with Technique 1 in any of the three cases. In addition, noise and model uncertainty seems to have a substantial impact on the transient response of the system.
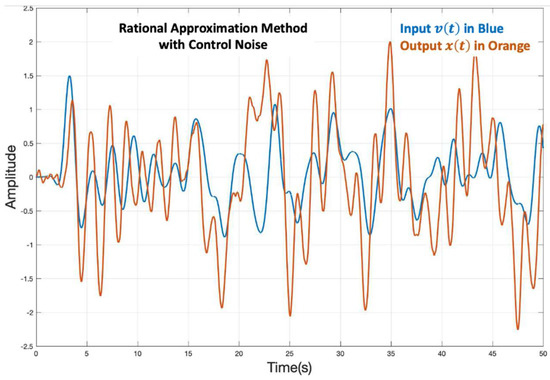
Figure 15.
Response to Randomized Input (Technique 1).
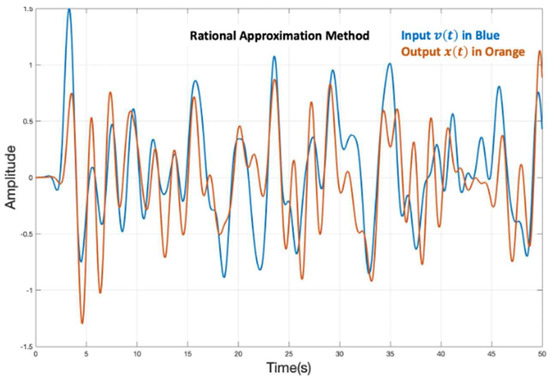
Figure 16.
Impact of Control Noise on Control Performance (Technique 1).
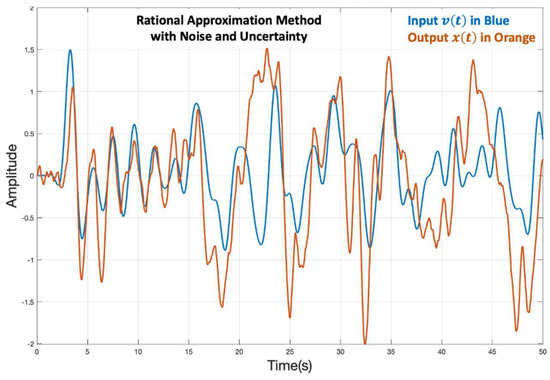
Figure 17.
Impact of Noise and Uncertainty (Technique 1).
- Techniques 2 and 3:
Once again, the compensators are the same as before in the -plane:
Simulation Results: As before, the control designs were transformed to the complex domain with . The results are presented in Figure 18, Figure 19 and Figure 20. Figure 18 shows the closed-loop response to the randomized periodic, while Figure 19 and Figure 20 show the robustness of the control designs. From the results, it appears that convergence to a neighborhood of the steady state cannot be achieved with Techniques 2 and 3 either in any of the three cases. As with Technique 1, noise and uncertainty have a substantial impact on the system’s transient response.
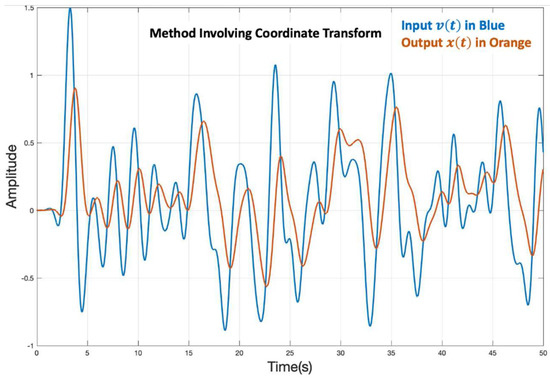
Figure 18.
Response to Randomized Input (Techniques 2 and 3).
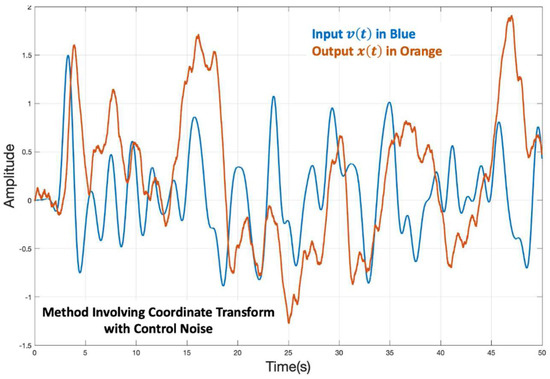
Figure 19.
Impact of Noise on Control Performance (Techniques 2 and 3).
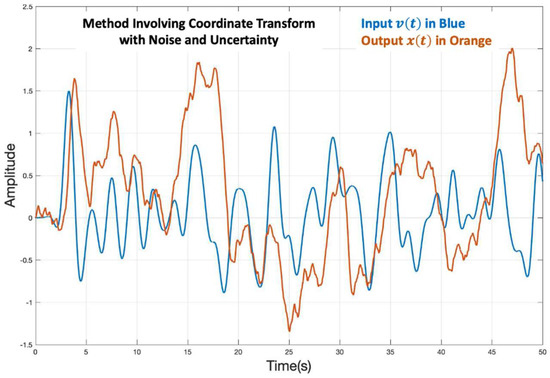
Figure 20.
Impact of Noise and Uncertainty (Techniques 2 and 3).
- Technique 4:
The compensators are the same as before (designed for ):
Simulation Results: The closed-loop responses with are presented in Figure 21, Figure 22 and Figure 23. Figure 21 shows a very good transient response with the use of Technique 4 when compared to Techniques 1, 2, and 3. This is consistent with the comparative results presented in the research literature (e.g., [36]) for simpler inputs. Further, Figure 22 and Figure 23 show improved robustness of the method to control noise and model uncertainties, respectively. This notwithstanding, steady-state errors are still present in all cases with the use of Technique 4. As with the other methods, control noise continues to have a substantial impact on the corresponding closed-loop behavior (Figure 22). It appears from Figure 23, however, that Technique 4 may be more robust to model uncertainties than other methods that are currently available.
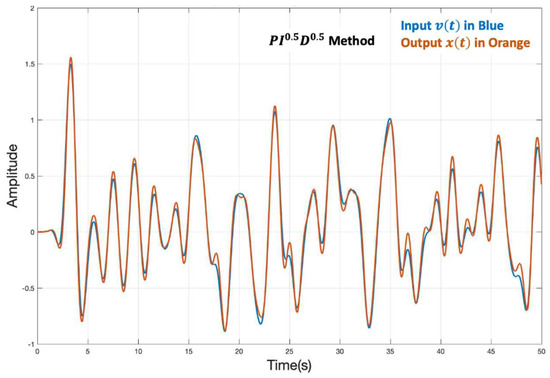
Figure 21.
Response to Randomized Input (Technique 4).
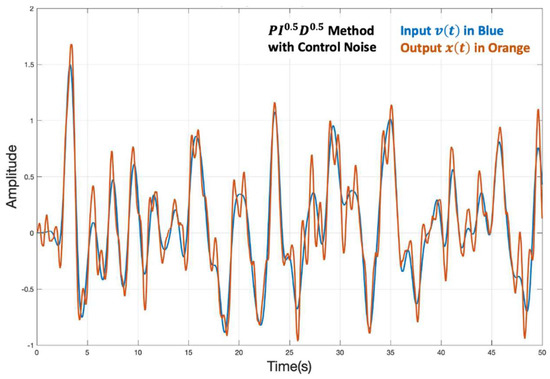
Figure 22.
Impact of Noise on Control Performance (Technique 4).
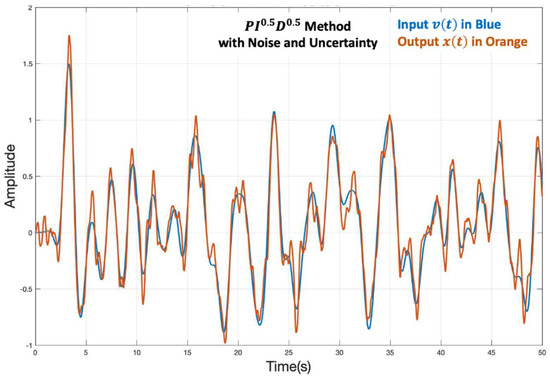
Figure 23.
Impact of Noise and Uncertainty (Technique 4).
- New Method:
Compensator designs from previous sections for are as follows:
Simulation Results: The closed-loop responses with the new method are shown in Figure 24, Figure 25 and Figure 26. It can be seen that the closed-loop response to the randomized periodic input in Figure 24 is virtually identical to the one seen with . This clearly indicates that the new method has the potential to maintain control performance in the design bandwidth. Figure 25 shows the robustness of the new method to control noise, and Figure 26 includes the effects of model uncertainties. In all cases, an excellent closed-loop response is seen with the new method.
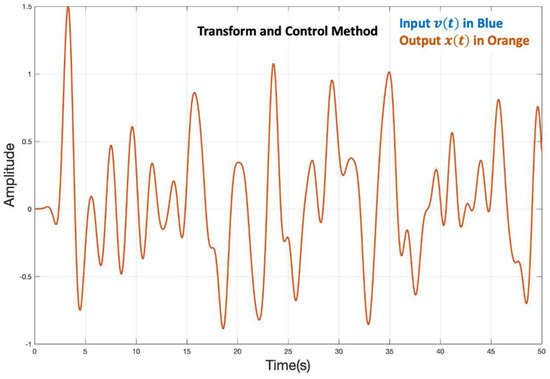
Figure 24.
Response to Randomized Input (New Method).
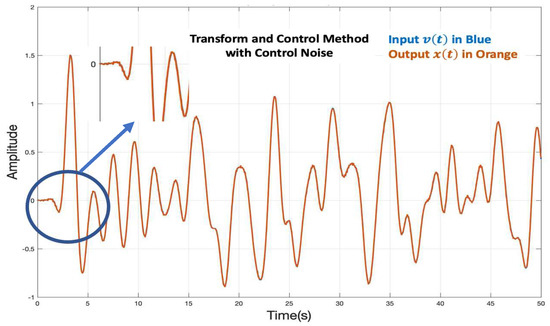
Figure 25.
Impact of Noise on Control Performance (New Method).
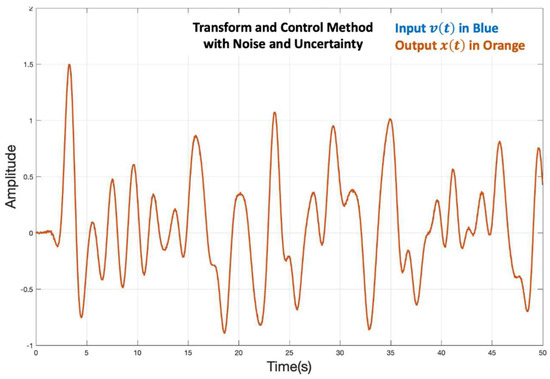
Figure 26.
Impact of Noise and Uncertainty (New Method).
Comment: Robustness to model uncertainties with the new method is seen as a particularly important result. This is due to the fact that even with an approximate transformation of a fractional LTI plant, better control performance may be possible. The conditions under which this is true in more general cases is a topic of future research.
7.2. Comparison of Closed Loop Responses
- Closed Loop Responses to Periodic Input: Convergence to a neighborhood of the steady state could not be achieved with the use of Techniques 1, 2, and 3. Technique 4 exhibited large steady-state errors, while the new method showed excellent convergence and negligible steady-state behavior.
- Robustness to Control Noise: Control noise had a significant impact on the tracking performance of all currently available techniques in the bandwidth of the input signal. The new method showed excellent robustness in controlling noise. Some amount of chatter was seen in the closed-loop response. Future work will focus on smoothing this.
- Robustness to Parameter Uncertainty: Uncertainties in the coefficients and the exponents of the plant had a significant impact on the tracking performance of all currently available techniques in the bandwidth of the input signal. The new method showed excellent robustness to such uncertainties.
8. Realization of the Fractional Compensation Terms Used in the New Method
As noted in Section I and seen in the examples presented in Appendix B, the feedback and feedforward compensation laws needed to transform fractional systems into standard ones use terms that have the form , . It can be shown that the inverse transform of is the Riemann-Liouville fractional integral [37] shown below (with zero initial conditions for simplicity) In Equation (7):
In the rest of this section, the existence of the convolution integral shown above, as well as its practical realization using hardware and software subsystems, are considered.
- Existence
It can be seen that the kernel function of the Riemann-Liouville integral, is Lebesgue measurable in the interval. Since the closed loop system is stable, can be expected to remain bounded. Together, these imply that the Riemann-Liouville fractional integral does indeed exist in the Lebesgue sense and will be bounded in the interval. More general results on such integrals (including the existence of their Laplace transform in the Lebesgue sense) are discussed in [38].
- Realization of Fractional Terms
Two realizations of the Riemann-Liouville integral currently available are discussed here. First, software modules developed by the research community are available in MATLAB® as part of the toolkits described in Section I. Second, hardware realizations using ladder networks of circuit components (e.g., [39]), operational amplifiers (e.g., [40]), and memristors (e.g., [41]) have been proposed and implemented over the past decade. Such advances suggest that the fractional transforms used for the transformation of a fractional system can be realized using HW/SW subsystems. The realization of was addressed in a recent paper [42], and a conceptual design that is capable of accepting a value of the fractional order and realizing the related fractional order derivative is described by Gonzalez et al. in [43]. It is noted that, in a more general sense, the realization of the Riemann-Liouville integral is dependent on the implementation of a convolution operation in hardware or software. This is a topic with a rich history of developments in the field of digital signal processing (e.g., [44]).
- Realization of Feedback and Feedforward Compensation Transfer Functions
Table 2 and Table 3 show the networks used for the realization of the inner and outer loop feedback and feedforward compensation transfer functions for the new method. It is clear from the figures that in each case, besides summation, feedback, and simple circuit elements, the only additional term needed for the transformation of a fractional LTI system into a standard one is a subsystem that emulates the Riemann-Liouville integral.
Table 2.
Realization of the Inner Loop Compensation Terms.
Table 3.
Realization of the Outer Loop Compensation Terms.
9. Applicability of the New Method to Systems with Arbitrary Initial Conditions
The new method proposed in this paper has been developed under the assumption of zero initial conditions. In this section, it is shown that the method can be easily extended to systems with arbitrary initial conditions by adding additional terms to the control law. The Laplace transform of the Caputo fractional order derivative, with arbitrary initial conditions is given by the following equation:
With the assumption made in the paper regarding full observability and controllability, all the initial condition terms within the summation are available. The example used for control analysis may be represented in the time domain as shown in Equation (8) below:
where, and . Its Laplace transform with arbitrary initial conditions, and may be derived as shown below:
Let the control , where the former represents the control signal required for control and the former compensates for arbitrary initial conditions. For the example in Equation (6), . With this, Equation (8) can be reduced to the form shown below in Equation (11):
All of the control results presented in the previous sections can be interpreted as compensator designs required for the generation of the control signal . Figure 1 and Figure 4 would be modified to include the additional signal to account for arbitrary initial conditions, as shown in Figure 27 and Figure 28 below.
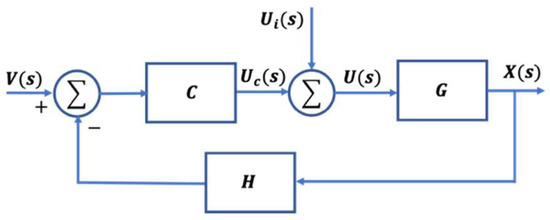
Figure 27.
Control Architecture for Techniques 1–4 with Arbitrary Initial Conditions.
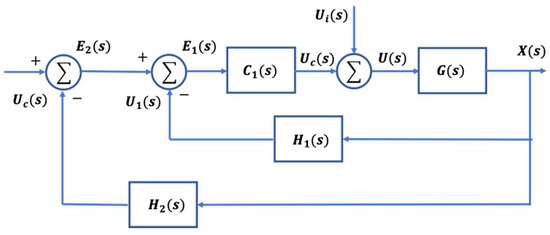
Figure 28.
Transform and Control with Arbitrary Initial Conditions.
- Realization of
The final consideration in the paper is whether exists, can be realized in the time domain, and is bounded. It is well known that the Laplace transform of the function is . The lower bound on assures the existence of the Gamma function. It is noted that the lowest value of in Equation (6) is 0.5 . In particular, for the example system in Equation (7), the control signal can be derived as shown below, and it can be seen that it remains bounded as grows.
Note that the derivation has been made with the common assumption that . From the discussions here, it is clear that all of the control methods analyzed in the paper can be extended to fractional LTI systems with arbitrary initial conditions as long as they are observable and controllable. In fact, the extension presented here is no different from what is involved in the control of standard LTI systems. It is noted that while the signals remain bounded , control saturation constraints may limit the ability to generate the required inputs in practice for small values of . A formal study of the impact of control saturation on control stability and performance will be needed for the full application of methods currently in use for controlling fractional LTI systems, as well as the new method.
10. Conclusions and Future Work
In this paper, the authors introduce a new approach called Transform and Control for the control of fractional LTI systems. It describes a procedure for the design of the feedback and feedforward compensation needed to transform a fractional system into a standard one and then control it to achieve the desired closed-loop behavior. From the results presented here (and in [20]), it is clear that the proposed method has the potential to address more general types of fractional systems. In each example considered for the development of the method, it was shown that the closed loop system is assured of having an order of one for Systems 1–4 and two for System 5. Realizations of the compensation transfer functions are computationally simple and involve the use of networks constructed using subsystem implementations of the Riemann-Liouville integral, summation, feedback, and simple circuit elements.
The simulation results presented in the paper using an example fractional LTI system show that better performance and robustness can be achieved with the new method compared to existing ones. Further, it was shown that the control designs discussed in the paper could be extended to systems with arbitrary initial conditions.
It is the authors’ opinion that the method described here will enable the development of a more general theory of fractional systems, begin its mainstreaming in systems theory, and lead to new control algorithms and implementations that address many different problem areas in engineering and the life sciences. Future work by the authors will investigate the generalizability of the new method to classes of fractional LTI systems, examine its robustness properties, and extend it to multi-input, multi-output (or higher order) systems that may be partially observable and controllable.
Author Contributions
Conceptualization, S.V.S. and K.S.N.; methodology, S.V.S. and K.S.N.; software, L.Z.; validation, S.V.S., K.S.N. and L.Z.; writing—original draft preparation, S.V.S. and K.S.N.; writing—review and editing, S.V.S. and K.S.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
- Linear Systems Theory
Systems theory involves the identification of a dynamical system, the interpretation of its response to prescribed inputs, and the modification of such responses to desired ones. The interpretation of the behavior of a standard linear time-invariant (LTI) system, described using ODEs of finite integer order with constant coefficients, is well-known. It is based on the roots (real and complex conjugate pairs) of its impulse response, which may then be extended to study responses to standard inputs, typically exponential, sinusoidal, or a combination of the two. Modification (control) of its behavior is also well understood and involves changing the roots of its impulse response using feedback and feedforward compensation. The compensation necessary for control is realized typically using networks that contain summation, feedback, and simple circuit elements (e.g., RLC for the control of a servo motor). Readers are referred to Callier and Desoer [45], Åstrom and Murray [7], Bryson and Ho [46], Zhou and Doyle [47], and Narendra and Annaswamy [48] for formal results and the tools available for their application to practical problems.
- The Laplace Transform in Linear Systems Theory
The use of the Laplace transform significantly reduces the complexity involved in studying standard LTI systems in the time domain. This is due to the fact that it converts ODEs to algebraic expressions (transfer functions) in the Laplace (frequency) domain. Further, since the kernel of the transform is an eigenfunction (i.e., , the resulting transfer functions are rational in the complex variable . With the use of Laplace transforms, the stability and transient behavior of an LTI system may be analyzed using the roots of the denominator and numerator polynomials, respectively, of its transfer function. This basic principle has been the cornerstone of the application of the Laplace transform in linear systems theory.
- Integer (vs) Fractional Order Derivative
The definition and application of an integer order derivative (referred to as the ordinary derivative) are both well-established and the result of advances made by Newton, Leibniz, L’Hopital, and others. In this section, a brief introduction to a fractional order derivative is provided for completeness. The reader is referred to an excellent survey by Ross [49], which describes the evolution of the definition of the term over the past two centuries. The original definition of the fractional order derivative was due to the independent work of both Riemann and Liouville [49]. The one considered by the authors here was proposed by Caputo in 1967 [50] and is defined as follows:
where, is continuous and has an order of . The kernel is Lebesgue measurable in the interval. Consequently, if is as well, the convolution in Equation (1) will exist. It is assumed in the paper that , and . is the complete Gamma function and is defined as shown in the following expression:
Convolutions used in the definitions of fractional derivatives (of the Riemann-Liouville or Caputo type) and the fractional integral (Riemann-Liouville) cannot be interpreted in the Riemann sense. This is due to the fact that they involve power kernels that are singular at one of the two integration limits. For example, in Equation (1) is singular at . However, contrary to the discussions in [51] and other similar publications, this is not seen as an issue by the authors. Convolutions used in such definitions can be defined in the Lebesgue sense since their kernels are unbounded only by a set of measure zero. Therefore, the Riemann-Liouville integral, the Riemann-Liouville derivative, and the Caputo derivative in Equation (1) both exist and are bound. It is noted, however, that (unlike the ordinary derivative) a simple, intuitive explanation for a fractional derivative in the time domain is not available at present.
- Origin of the Fractional Order Derivative
The continuous time definition of a fractional order derivative came from papers published independently by Riemann and Liouville in the 1830s [37,52]. It was based on that of a fractional order integral, derived by generalizing Cauchy’s representation of multiple iterated integrals using the single convolution (shown in the equation below):
represents repeated integration steps of the function , where each integration variable is independent of the rest. By replacing the Binomial term in the expression with a Gamma function, Equation (A2) was extended to and the equation below was suggested as a formal definition of a fractional order integral ():
Equation (A3) is called the Riemann-Liouville fractional integral of order . Note that the definition is valid for all non-integer values of (rational and irrational). In addition, note that for to exist, the condition must be satisfied. Its terminal condition is . An important observation is that Equation (A3) cannot, in general, be expressed using a Riemann integral, since is unbounded at . On the other hand, it does exist in the Lebesgue sense over the entire interval since the kernel is unbounded only at the upper integration limit or on a set of measure zero.
- The Riemann-Liouville Derivative
The definition of a fractional order may be derived from that of the fractional order integral shown in Equation (A3). Differentiating the equation times, , one obtains the following expression:
Let . When , Equation (15) continues to represent a fractional integral of order . When , and the expression can be used to represent an anti-fractional order integral or a fractional order derivative. With this, the fractional derivative was defined as shown below:
With the terminal condition (when ) . Once again, the definition is valid for all non-integers, both rational and irrational.
- Caputo Fractional Derivative
The work of Riemann and Liouville led to other definitions of fractional derivatives. In 1967, Caputo introduced a modification to the Riemann-Liouville definition in Equation (A5). Under the assumption that , the definition in Equation (A5) can be simplified as shown in the expression below:
Since both the kernel and the function in the convolution are differentiable, the derivative can be applied to either of the two terms. This modifies the expression above to the following equation [50] (with ).
Equation (A6) was proposed by Caputo as an alternative definition of a fractional order derivative. Its terminal conditions are and .
- Rationale for the Selection of the Caputo Definition
Caputo introduced Equation (A6) as a definition that is more consistent with viscoelastic properties, including creep, hysteresis, and relaxation. Traditionally, viscoelasticity is modeled using a linear combination of elasticity and Newtonian fluid flow and relates mechanical stress in an element to related strain and rate of strain, respectively. The principal model types used are Kelvin-Voigt (which has the two phenomena in parallel) and Maxwell (where they are in series). A combination of the two is called the Standard Viscoelasticity Model. Data from stress-strain tests conducted on materials with complex molecular structures, such as natural and synthetic rubbers, polymers, and biological tissue, however, seemed to be at odds with the assumptions made in the development of the Standard Viscoelastic Model. This led to the investigation of new representations, and the model suggested by Nutting in 1921 and shown in Equation (A7) below is perhaps the most common for non-traditional viscoelasticity. It combines elasticity, Newton’s fluid flow, relaxation, and creep into a single equation. is the stress in the material, , related strain, and , the characteristic time. is the Caputo fractional derivative. For , the stress changes with the strain in accordance with the expression , where is a constant. Then, for , it changes to Equation (A7).
An excellent review of viscoelastic models is available in Mainardi and Caputo [53].
The applications discussed in [2] and listed in Section 2 apply Caputo’s definition for the representation of dynamical behavior. In the case of polymer and lung viscoelasticity, stress-strain test data demonstrate better fits between experimental data and models that involve fractional derivatives of the Caputo type. This is also the case with equivalent circuit models that have fractional capacitance. In fact, even models used for bacterial growth and the spread of diseases appear to work well with the derivative. The applicability of the Caputo derivative to a wide range of practical applications has been the primary driver for the authors’ choice of the definition in Equation (A6) in their research.
- Other Definitions of a Fractional Derivative
In addition to the definitions developed by Riemann and Liouville, and Caputo, a number of other continuous and discrete time definitions of a fractional derivative have been proposed over the past years. Among them, the continuous time definitions introduced by Hadamard, Reisz, Weyl, and Atangana-Beleanu have been analyzed in the research literature (e.g., [54]). The most important discrete-time definition is the one developed by Grünwald and Letnikov, historically at around the same time as Riemann and Liouville. It was derived directly from the limit theorem in calculus and was introduced by Grünwald in 1867 and Letnikov in 1868 [55]. The idea behind this definition is a generalization of the Limit Theorem for the order derivative. The repeated application of the Limit Theorem times leads to the following definition of :
where . A generalization of the relationship where leads to Equation (A8):
which describes the Grünwald-Letnikov definition of a fractional derivative. Later work by Jumarie [56,57] takes a similar approach and then uses the results to modify the definition of the Riemann-Liouville fractional derivative so that difficulties that arise from the fact that 0 is removed.
- Fractional LTI Systems
The fractional systems considered in this paper may be constructed by adding terms involving the Caputo fractional derivatives to ODEs with constant coefficients. Such systems are still LTI due to the fact that exhibits homogeneity () and linearity (. Perhaps the simplest example of a fractional LTI system is shown below in Equation (A9):
where, is the control input, and . This may be viewed as the fractional counterpart to the standard first-order system studied in linear systems theory for well over a Century. The system in Equation (A9) is analyzed in this section in some detail to present the differences between the homogeneous solution of a fractional differential equation with arbitrary initial conditions and the impulse response of the same system.
As shown in [33], the homogeneous solution to the system in Equation (A9) is , where is the one-parameter Mittag Leffler function [33] (shown in Equation (A10) below), and is the initial condition. As discussed in [58], is monotonic, is stable (unstable) when (). It is asymptotically stable for ( as ). It is noted that . Figure A1 (Mainardi [59]) describes the evolution in time of for various values of and . When , the decay from an initial condition is exponential. As the value of is reduced, while the initial decay of the function is more rapid, it tends to slow down when compared to . The crossover points for various values of appear to be near s.
The inhomogeneous solution of the system in Equation (A9) with an impulse input and zero initial condition can be expressed as shown in the equation below:
where,

Figure A1.
Homogeneous Solution of Equation (A2) for various values of .
Figure A1.
Homogeneous Solution of Equation (A2) for various values of .

The inhomogeneous solution for different values of is described in Figure A2 below. The primary reason for the significant differences between the responses shown in Figure 1 and Figure 2 for various values of are listed below:

Figure A2.
Impulse Response for various values of .
Figure A2.
Impulse Response for various values of .

- i.
- The denominator of is less than that of for small values of .
- ii.
- is multiplied by , which is large for small values of .
The impulse response of the simple fractional LTI system in Equation (A9) with arbitrary initial conditions is therefore given by Equation (A12) below:
Closed-form solutions in the time domain for more general fractional LTI systems have been developed by Gorenflo and Luchko (e.g., [60]). Their approach involves Mikusinski’s operational calculus [61] and time domain representations using multi-parameter, multi-input Mittag-Leffler functions [33,60]. Both operational calculus and Mittag-Leffler functions are not, in general, commonly used in systems theory. These and the inherent difficulties in understanding the response of a fractional system to standard inputs (impulse, step, and periodic) have impeded its systematic study in systems theory.
- Study of Fractional LTI Systems Using the Laplace Transform
The Laplace transforms may also be used for fractional LTI systems due to the three considerations listed below:
- It can be shown that is an eigenfunction of the system in Equation (A9) since the convolution operation involved in studying the response of the system to (with integration limits ), allows the Gamma function to be factored out. As a result, the Laplace transform can be applied for the analysis (and control) of fractional LTI systems.
- Ordinary derivatives and integrals are typically defined in the Riemann sense. On the other hand, with fractional systems, both the derivatives and integrals involve convolutions with power kernels that are singular at one of the two integration limits. However, contrary to the discussions in [51] (and other similar ones), this is not seen as an issue by the authors since such convolutions can be defined and do exist in the Lebesgue sense.
- And lastly, by applying the results discussed in [38] it can be shown that the Laplace transform of the Caputo derivative (which involves a Lebesgue convolution) exists. It is noted that the condition must be true since exists only when . This additional restriction is required for the analysis of fractional LTI systems using the Laplace transform. Therefore, the interpretation of must be , which in turn requires that is sufficiently differentiable.
The Laplace transform of the impulse response () of the system described by Equation (A9) is shown below:
where . The Laplace transform of is shown below:
is its initial condition. With this, the transfer function of the system is as follows:
The response of the system to any arbitrary input is given by Equation (A15) below:
It is noted that and . With and , the transfer function in Equation (A14) can be reduced to . In this example, is the feedforward signal designed to compensate for arbitrary initial conditions, and is the control input with zero initial condition. The use of additional inputs to account for arbitrary initial conditions, and the realizability of are addressed in this paper and are no different from their study in linear systems theory. It was shown that they exist, are causal, and can be realized using HW/SW subsystems. The transfer function represents the system in the frequency domain with zero initial condition. Its inverse transform (and its impulse response in the time domain) is .
Transfer functions of more general fractional LTI systems can be represented similarly using the following expression:
Unlike standard LTI systems, however, neither nor is a rational function. In fact, each is an expression containing real powers of . Tools required for the determination of the roots of such expressions, as well as the analysis of the stability properties of transfer functions containing such expressions, are not available at present. A majority of the results developed in the field over the past thirty years (e.g., Xue [14]) have largely been focused on the extension of the result presented for the system in Equation (2). In particular, the transfer functions typically considered are ones for which roots are available. In the example shown below, where and , the general system can be expressed as an -fold series connection of the system in Equation (3), and and have been determined.
- A Note on Input-Output Behavior of Fractional LTI Systems
Standard LTI systems are typically subjected to unit steps and periodic inputs to understand their dynamical behavior. The latter can be signals with a single frequency or a linear combination of multiple ones. The frequencies seen in the output signal will be the same as the ones in the input since their transfer functions are rational. In the case of fractional LTI systems, this is not the case since their Laplace transforms contain non-integer powers of the complex variable . Consequently, this paper investigates control behavior using a unit step, a periodic, and a randomized periodic input. Such an approach might better illustrate the types of inputs the control designs can handle without a significant impact on closed-loop performance. Since most of the research results presented in the field restrict themselves to step response, the authors consider the results presented here for all methods as new results.
Appendix B
This Appendix is devoted to a bottom-up development of the new method using increasingly complex fractional plants of orders between one and two. The control architecture used for the new method (Figure 2) is shown below in Figure A3 below for convenience.

Figure A3.
Transform and Control Architecture.
Figure A3.
Transform and Control Architecture.

- System 1: Fractional Integrator:
The first system considered in this section is a fractional integrator (). To change the fractional poles in this particular case to a standard one, one may consider choosing . A more general approach, however, involves the use of the feedback compensation . For the fractional integrator, it is selected as shown below:
Since the plant does not have a fractional zero, the feedforward compensation with this choice will be . With these selections, is transformed to as shown in the following expression:
It is clear that the fractional poles of have been converted to a simple pole using the inner loop. The fractional zero of can be canceled with . As a final step, the poles of can be changed to (the desired pole location) by choosing . With these choices, the closed loop transfer function would be given by the expression below:
The key contribution here is the modification of the fractional pole in to a standard one and the removal of the fractional zero in . With these steps, pole placement is straightforward using well-established tools in systems theory. and involve fractional integration, and their realization is discussed in Section 8 of the paper.
- System 2: One Fractional Pole:
A variation of system 1 is , which shifts the poles of the plant away from the origin . In this case, includes a gain as shown below:
With the same and as in System 1, it can be shown that is still . The network, as well as the fractional transfer function needed for the realization of are discussed in Section 8 of the paper.
- System 3: One Fractional Pole and A Fractional Zero at the Origin:
The third example adds zeros at the origin. For the system to be proper, it is assumed that . Given that this plant has the same denominator as the one in the previous example, it can be expected that would remain the same. The feedforward compensator , however, needs to be chosen so that the fractional zeros of are canceled. Both terms are selected as shown below:
It can be shown once again that . As before, with the feedback and feedforward terms in the outer loop designed as shown in the following equation:
the closed-loop system is . The key contribution here is the choice of to cancel the fractional zeros in and its realization is dealt with in Section 8.
- System 4: One Fractional Pole and One Fractional Zero:
The fourth example is a variation of the third. In it, . This moves the zeros of the plant away from the origin . With the same feedback as Example 3 and a modified feedforward compensation (both described in the following expressions):
It can be shown that , With the same outer loop compensation terms as before, it can be shown that the closed-loop system is . The realization of here is more involved than the previous example and is described in Section 8.
- System 5: Many Fractional Poles and Many Fractional Zeros: :
The fifth and final example is a standard second-order system with additional terms involving fractional powers of . and , and . The feedback and feedforward terms for the transformation and control of the system are selected as shown in the following expressions.
With these, it can be shown that the closed-loop transfer function is as shown below:
The closed loop system is a standard second-order system. and can be selected for desired behavior. It is noted that the choice of assumes the availability of (or the velocity) for feedback.
References
- van Assche, K.; Valentinov, V.V.G. Special Issue on Ludwig von Bertalanffy; Wiley: Hoboken, NJ, USA, 2019; Volume 36, Available online: https://onlinelibrary.wiley.com/toc/10991743a/2019/36/3 (accessed on 21 October 2022).
- Shastri, S.V.; Narendra, K.S. Applications Involving Dynamical Phenomena Described by Fractional Order Derivatives; Yale Technical Report#2002; Yale University Press: New Haven, CT, USA, 2020. [Google Scholar]
- Shastri, S.V.; Narendra, K.S. Fractional Order Derivatives: An Introduction; Yale Technical Report #2001; Yale University Press: New Haven, CT, USA, 2020. [Google Scholar]
- Das, S. Importance of Fractional Calculus in Real Life Engineering and Science Applications. In Proceedings of the Workshop on Fractional Order Systems, Indian Institute of Technology, Kharagpur, India, 16–20 February 2018. [Google Scholar]
- Bagley, R.L.; Torvik, P.J. A Theoretical Basis for the Application of Fractional Calculus to Viscoelasticity. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- Dai, Z.; Peng, Y.; Mansy, H.; Sandler, R.; Royston, T. A Model of Lung Parenchyma Stress Relaxaton Using Fractional Viscoelasticity. Med. Eng. Phys. 2015, 37, 752–758. [Google Scholar] [CrossRef] [PubMed]
- Astrom, K.J.; Murray, R.M. Feedback Systems: An Introduction to Scientists and Engineers; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Boskovic, M.; Sekara, T.; Lutovac, B.; Mandic, P. Analysis of Electrical Circuits including Fractional Order Elements. In Proceedings of the 6th Mediterranean Conference on Embedded Computing, Bar, Montenegro, 11–15 June 2017. [Google Scholar]
- Magin, R.L. Fractional calculus models of complex dynamics in biological tissues. Comput. Math. Appl. 2010, 59, 1586–1593. [Google Scholar] [CrossRef]
- Rabiee, R.; Chae, Y. Adaptive Base Isolation System to Achieve Structural reiliency under Both Short- and Long-Period Earthquake Motions. J. Intell. Mater. Syst. Struct. 2018, 30, 16–31. [Google Scholar] [CrossRef]
- Shahi, S.; Baker, J. An Efficient Algorithm to Identify Strong-Velocity Pulses in Muticomponent Ground Motions. Bull. Seismol. Soc. Am. 2014, 104, 2456–2466. [Google Scholar] [CrossRef]
- Makris, N.; Constantinou, M. Spring-Viscous Damper Systems for Combined Seismic and Vibration Isolation. Earthq. Eng. Struct. Dyn. 1992, 21, 649–664. [Google Scholar] [CrossRef]
- Sabatier, J.; Merveillaut, M.; Francisco, J.; Guillemard, F.; Porcelatto, D. Lithium-Ion Batteries Modeling Involving Fractional Differentiation. J. Power Sources 2014, 262, 36–43. [Google Scholar] [CrossRef]
- Xue, D. Fractional-Order Control Systems: Fundamental and Numerical Implementations; De Gruyter Academic Publishing: New York, NY, USA, 2017. [Google Scholar]
- Oustaloup, A. Systemes Asservis Lineaires d’Ordre Fractionnaire: Theorie et Pratique; Editions Masson: Paris, France, 1983. [Google Scholar]
- Petras, I. Stability of Fractional-Order Systems with Rational Orders. arXiv 2008, arXiv:0811.4102v2. [Google Scholar]
- Li, Z.; Liu, L.; Dehghan, S.; Chen, Y.; Xue, D. A Review and Evaluation of Numerical Tools for Fractional Calculus and Fractional Order Controls. Int. J. Control. 2015, 90, 1165–1181. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Order Systems and Controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Vinagre, B.; Podlubny, I.; Hernandez, A.; Feliu, V. Some Approximations of Fractional-Order Operators Used in Control Theory. Fract. Calc. Appl. Anal. 2000, 3, 231–248. [Google Scholar]
- Shastri, S.V.; Narendra, K.S. Transform and Control: A New Approach to Controlling Dynamical Systems Described by Fractional Order Derivatives; Yale Technical Report #2003; Yale University Press: New Haven, CT, USA, 2020. [Google Scholar]
- Birs, I.; Muresan, C.; Nascu, I.; Ionescu, C. A Survey of Recent Advances in Fractional Order Control for Time Delay Systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI Stability Conditions for Fractional Order Systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Padula, F.; Visioli, A. Advances in Robust Fractional Control; Springer: New York, NY, USA, 2015. [Google Scholar]
- Ortigueira, M.; Bengochea, G. Non-Commensurate Fractional Linear Systems: New Results. J. Adv. Res. 2020, 11, 11–17. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov Functions for Fractional Order Systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Carlson, G.E.; Halijak, C.A. Approximation of a Fractional Capacitor (1/s)^(1/n) by a Regular Newton Process. IEEE Trans. Circuit Theory CT-11 1964, 2, 210–213. [Google Scholar] [CrossRef]
- Matsuda, K.; Fujii, H. H-Infinity Optimized Wave-Absorbing Control: Analytical and Experimental Results. J. Guid. Control. Dyn. 1993, 16, 1146–1153. [Google Scholar] [CrossRef]
- Krishna, B.T. Studies on Fractional Order Differentiators and Integrators: A Survey. Signal Process. 2011, 91, 386–426. [Google Scholar] [CrossRef]
- Matignon, D. Stability Properties for Generalized Fractional Differential Systems. ESIAM Proc. Fract. Differ. Syst. Model. Methods Appl. 1998, 5, 145–158. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Generalized Functions for Fractional Calculus; NASA Technical Report—1999-209424/Rev1; NASA: Cleveland, OH, USA, 1999.
- Grosdidier, P.; Morari, M. Interaction Measures under Decentralized Control. Automatica 1986, 22, 309–319. [Google Scholar] [CrossRef]
- Lee, J.; Edgar, T.F. Phase Conditions for Stability of Multi-loop Control Systems. Comput. Chem. Eng. 2000, 23, 1623–1630. [Google Scholar] [CrossRef]
- Gorenflo, R.; Kilbas, A.; Mainardi, F.; Rogosin, S. Mittag-Leffler Functions, Related Topics and Applications; Springer Mongraphs in Mathematics; Springer: New York, NY, USA, 2014. [Google Scholar]
- Bagley, R.; Torvik, P. Fractional Calculus—A Different Approach to the Analysis of Viscoelastically Damped Structures. AIAA J. 1983, 21, 5741–5748. [Google Scholar] [CrossRef]
- Chen, Y.-Q. Ubiquitous Fractional Order Controls? IFAC Proc. Vol. 2006, 39, 481–492. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.-Q.; Hossein Nia, S.H. Linear Fractional Order Controllers; A Survey in the Frequency Domain. Annu. Rev. Control. 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Lizorkin, P. Fractional Integration and Differentiation. In Encyclopedia of Mathematics; Kluwer Academic Publishers: New York, NY, USA, 2001. [Google Scholar]
- Benedetto, J. The Laplace Transform of Generalized Functions. Can. J. Math. 2018, 18, 357–374. [Google Scholar] [CrossRef]
- Daou, R.A.Z.; Francis, C.; Moreau, X. Synthesis and Implementation of Non-Integer Integrators using RLC Devices. Int. J. Electron. 2009, 96, 1207–1223. [Google Scholar] [CrossRef]
- Dimeas, I.; Tsirimokou, G.; Psychalinos, C.; Elwakil, A. Realization of Fractional-Order Capacitor and Inductor Emulators Using Current Feedback Operational Amplifiers. In Proceedings of the International Symposium on Nonlinear Theory and Applications, Kowloon, Hong Kong, China, 1–4 December 2015. [Google Scholar]
- Petras, I.; Chen, Y.; Coopmans, C. Fractional-Order Memristive Systems. In Proceedings of the IEEE Conference on Emerging Technologies and Factory Automation, Mallorca, Spain, 22–25 September 2009. [Google Scholar]
- Krishna, B.; Reddy, K. Active and Passive Realization of Fractance Device of Order ½; Hindawi Publishing (Active and Passive Electronic Components): London, UK, 2008. [Google Scholar] [CrossRef]
- Gonzalez, E.; Dorcak, L.; Monje, C.; Valsa, J.; Caluyo, F.; Petras, I. Conceptual Design of a Selectable Fractional-Order Differentiator for Industrial Applications. Fract. Calc. Appl. Anal. 2014, 17, 697–716. [Google Scholar] [CrossRef]
- Oppenheim, A. Digital Signal Processing; OpenCourseWare; Massachusetts Institute of Technology MIT: Cambridge, MA, USA, 2011; Available online: https://ocw.mit.edu (accessed on 21 October 2022).
- Callier, F.M.; Desoer, C.A. Linear Systems Theory; Springer: New York, NY, USA, 1991. [Google Scholar]
- Bryson, J.A.E.; Ho, Y.-C. Applied Optimal Control; Taylor & Francis: New York, NY, USA, 1975. [Google Scholar]
- Zhou, K.; Doyle, J. Essentials of Robust Control; Prentice Hall: New York, NY, USA, 1998. [Google Scholar]
- Narendra, K.S.; Annaswamy, A.M. Stable Adaptive Systems; Prentice-Hall: New York, NY, USA, 1989. [Google Scholar]
- Ross, B. The Development of Fractional Calculus 1695–1900. Hist. Math. 1977, 4, 75–89. [Google Scholar] [CrossRef]
- Caputo, M. Linear Model of Dissipation whose Q is almost Frequency Independent. Geophys. J. Int. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Sabatier, J. Non-Singular Kernels for Modelling Power Law Type Long Memory Behaviours and Beyond. Cybern. Syst. 2020, 51, 383–401. [Google Scholar] [CrossRef]
- Reimann, B. Versuch einer allgemeinen Auffassung der Integration und Differentiation; Cambridge University Press: Cambridge, UK, 1876. [Google Scholar]
- Mainardi, F. An Historical Perspective on Fractional Calculus in Linear Viscoelasticity. Fract. Calc. Appl. Anal. 2012, 15, 712–717. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F. Fractional Calculus and Special Functions; Lecture Notes on Mathematical Physics; University of Bologna: Bologna, Italy, 2007. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 2009. [Google Scholar]
- Jumarie, G. On the Representation of Fractional Brownian Motion as an integral with respect to (dt)^Alpha. Appl. Math. Lett. 2005, 18, 739–748. [Google Scholar] [CrossRef]
- Jumarie, G. Modified Riemann-Liouville Derivative and Fractional Taylor Series of Nondifferentiable Functions: Further Results. Comput. Math. 2006, 51, 1367–1376. [Google Scholar] [CrossRef]
- Erdelyi, A.; Magnus, W.; Oberhettinger, F.; Tricomi, F. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1955; Volume 3, pp. 206–212. [Google Scholar]
- Mainardi, F. On Some Properties of the Mittag-Leffler Function E_alpha(-t^alpha), Completely Monotone for t > 0 with 0 < alpha < 1. Discret. Contin. Dyn. Syst. Ser. B 2014, 19, 2267–2278. [Google Scholar]
- Luchko, Y.; Gorenflo, R. An Operational Method for Solving Fractional Differential Equations with the Caputo Derivatives. Acta Math. Vietnam 1999, 24, 207–233. [Google Scholar]
- Mikusinski, J. Operational Calculus; Pergamon Press: New York, NY, USA, 1959. [Google Scholar]
















































Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).