


Fractional Order Model Identification of a Person with Parkinson’s Disease for Wheelchair Control


Abstract
1. Introduction
- -
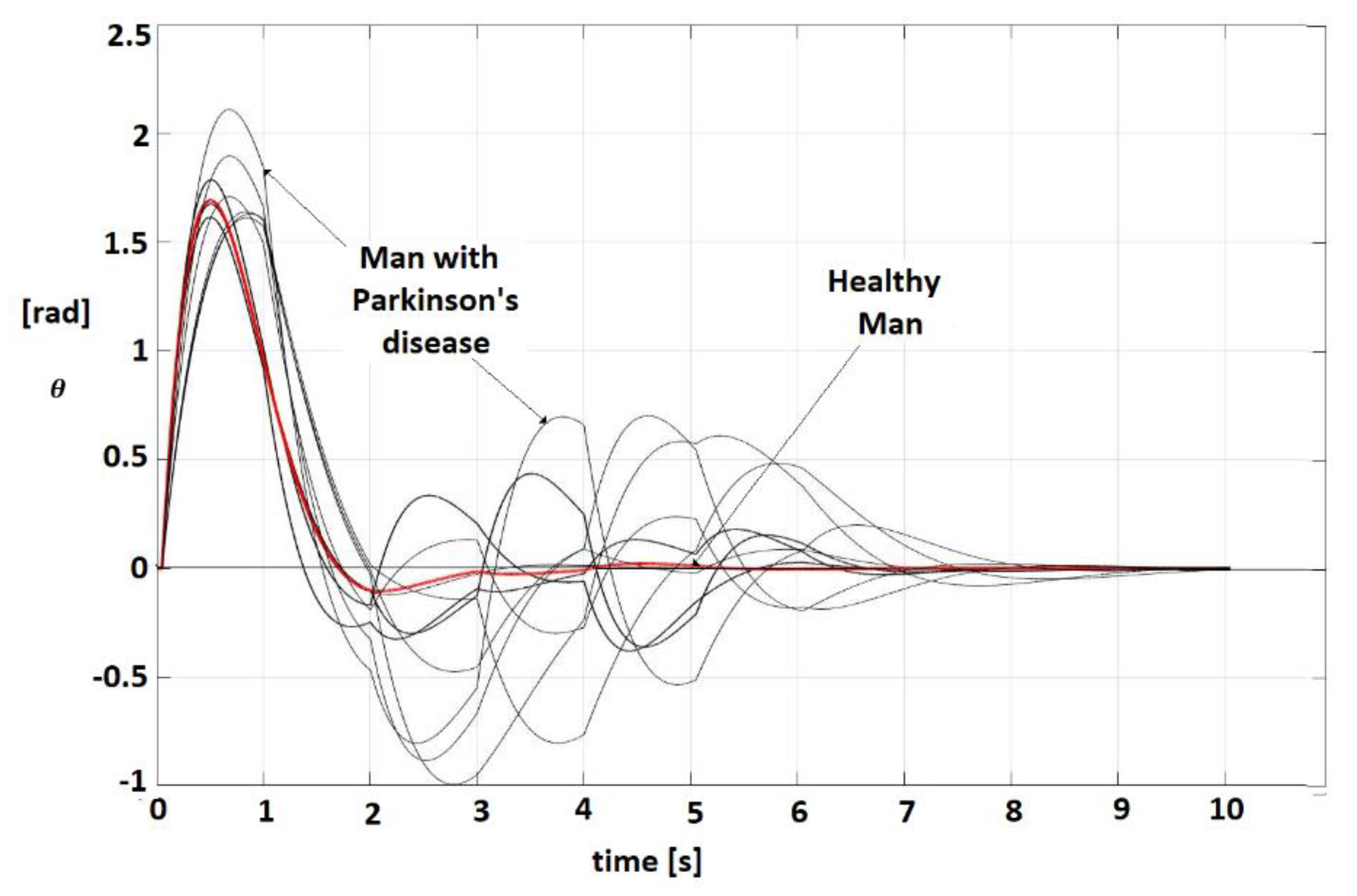
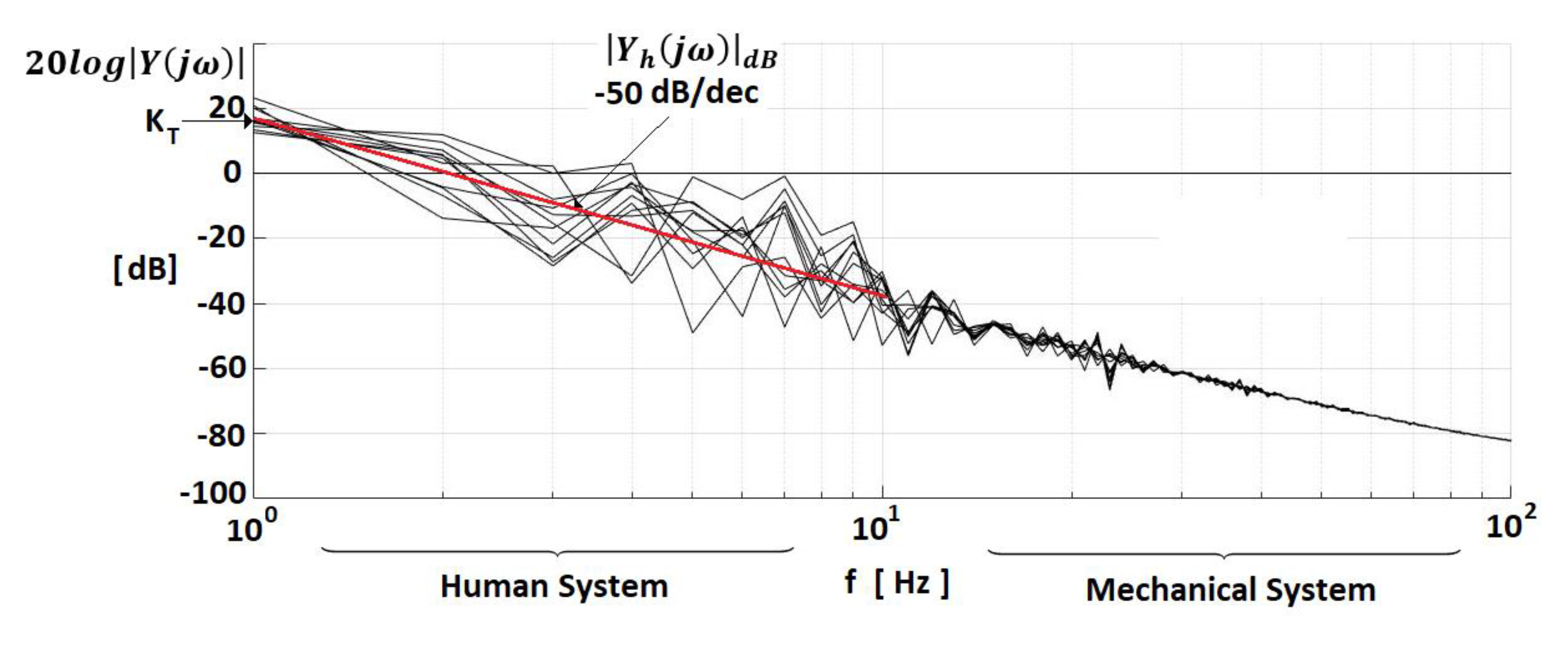
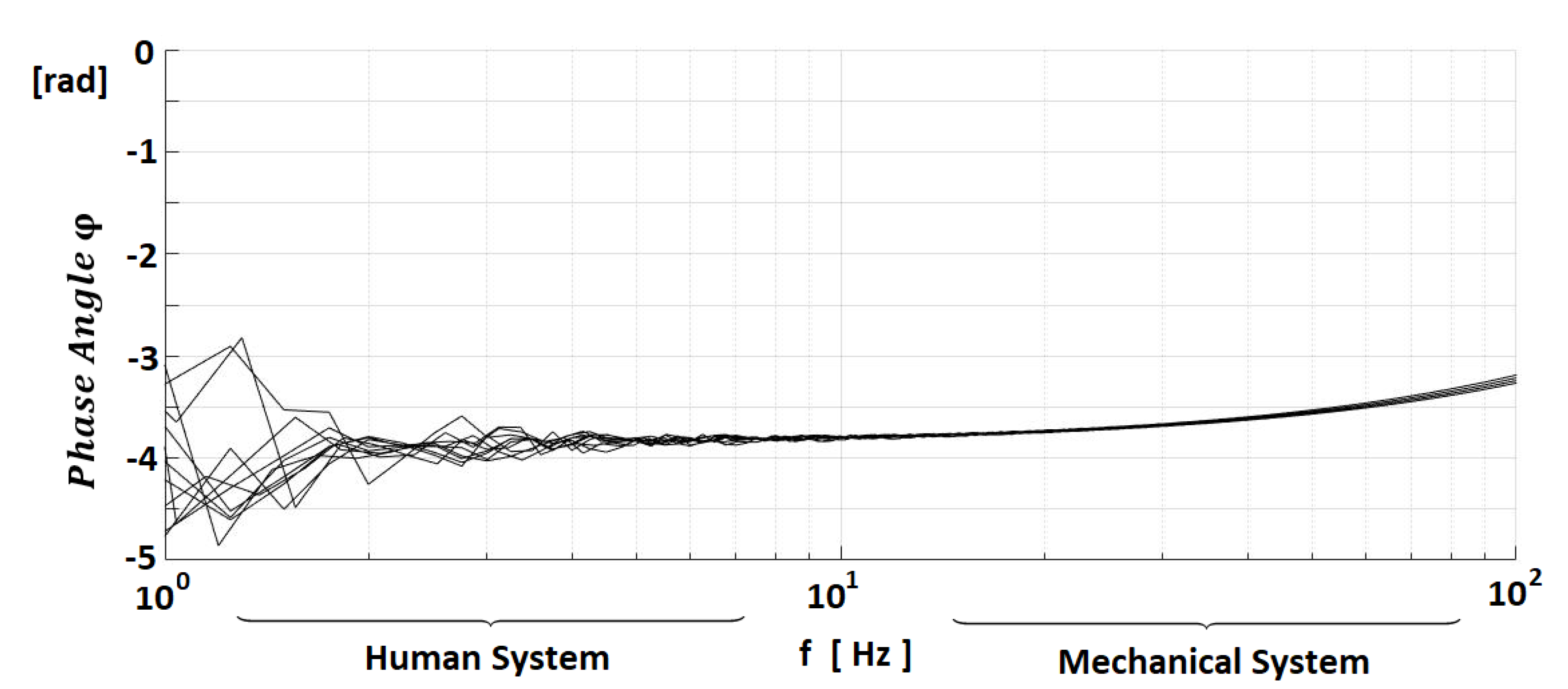
- The fractional order model that defines a Parkinson’s is investigated. An identification technique based on the analysis of the frequency behavior of the movement of a wheelchair driven by a person with Parkinson’s disease on the test trajectory is proposed. A fractional order exponent is inferred for people with this class of disability and a delay time crossover model is proposed.
- -
- The fractional dynamic model of the “disabled person-wheelchair” system is discussed.
- -
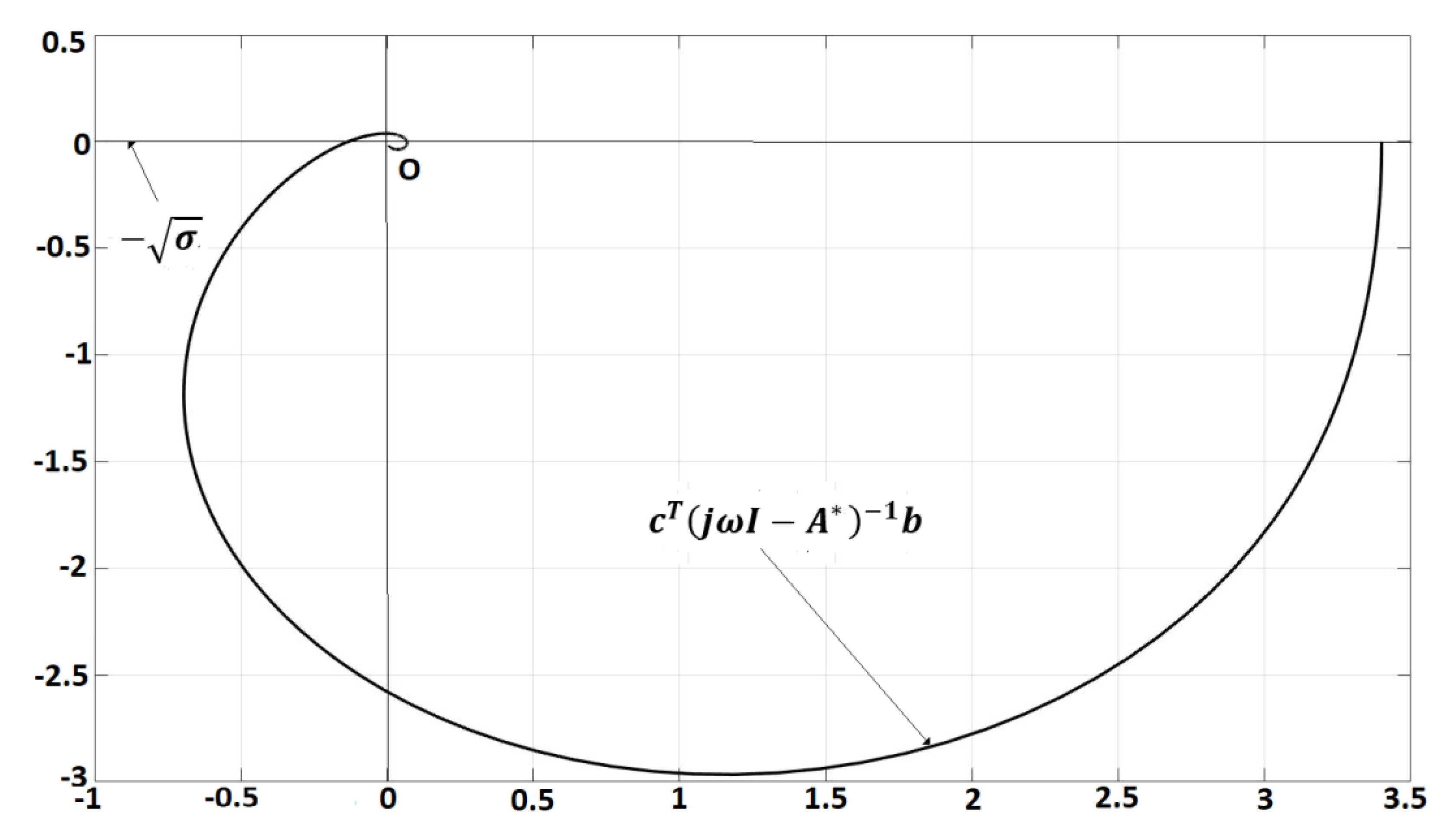
- An intelligent control system is proposed to compensate for the inability of the wheelchair driver. The stability of the control system is demonstrated by the Lyapunov techniques and frequency criteria derived from Yakubovici-Kalman-Popov Lemma.
- -
- An experimental technique for analyzing the movement performance is developed and a quality index is proposed to evaluate these experiments. The values of this index on the tests performed on Parkinson’s patients are analyzed and discussed.
2. Materials and Methods
2.1. Disabled Human Operator Identification
2.2. Disabled Man-Wheelchair Fractional Order Model
2.3. Control System
3. Results
3.1. Numerical Simulations
3.2. Experimental Tests
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Human gain coefficient kh (Patient 1) | |||||
| Experiment | 1 | 2 | 3 | 4 | 5 |
| kh | 15.84 | 12.04 | 6.80 | 7.01 | 13.01 |
| Experiment | 6 | 7 | 8 | 9 | 10 |
| kh | 6.29 | 7.82 | 8.01 | 9.24 | 8.73 |
| Human gain coefficient kh (Patient 2) | |||||
| Experiment | 1 | 2 | 3 | 4 | 5 |
| kh | 11.36 | 9.12 | 7.23 | 8.42 | 8.88 |
| Experiment | 6 | 7 | 8 | 9 | 10 |
| kh | 7.95 | 8.53 | 12.12 | 6.56 | 11.32 |
| Phase angle φ (Patient 1) | |||||
| Experiment | 1 | 2 | 3 | 4 | 5 |
| φ [rad] | 3.843 | 4.012 | 3.910 | 4.002 | 3.768 |
| Experiment | 6 | 7 | 8 | 9 | 10 |
| kh | 3.891 | 4.123 | 4.014 | 3.901 | 3.927 |
| Phase angle φ (Patient 2) | |||||
| Experiment | 1 | 2 | 3 | 4 | 5 |
| φ [rad] | 4.134 | 3.761 | 3.812 | 3.954 | 4.233 |
| Experiment | 6 | 7 | 8 | 9 | 10 |
| kh | 3.762 | 3.842 | 3.954 | 3.910 | 4.213 |
| Parameter. | Value | |
|---|---|---|
| J | Drive System Inertia | 0.270 kg·m2 |
| Ra | Armature resistance | 0.2957 |
| La | Armature inductance | 0.082 mH |
| Viscous friction coefficient | 0.1044 Nm s/rad | |
| ke | Speed constant | 1.685 rad/s/V |
| kt | Torque constant | 1.4882 Nm/A |
| m | Wheelchair mass | 98 kg |
Appendix B
| Experiment | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 |
| Parkinson’s Patient 1 (without controller) | 6.80 | 7.48 | 5.75 | 6.32 | 5.92 |
| Experiment | Test 6 | Test 7 | Test 8 | Test 9 | Test 10 |
| Parkinson’s Patient 1 (without controller) | 8.24 | 6.12 | 7.35 | 8.94 | 7.02 |
| Experiment | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 |
| Parkinson’s Patient 1 (with controller) | 3.92 | 3,58 | 4.13 | 4.02 | 3.72 |
| Experiment | Test 6 | Test 7 | Test 8 | Test 9 | Test 10 |
| Parkinson’s Patient 1 (with controller) | 3.84 | 4.03 | 3.82 | 3.72 | 3.64 |
Appendix C
Mathematical Preliminaries
References
- McRuer, D.T.; Jex, H.R. A Review of Quasi-Linear Pilot Models. IEEE Trans. Hum. Factors Electron. 1967, 3, 235–249. [Google Scholar] [CrossRef]
- Kleinman, D.I.; Baron, S.; Levison, W.H. An Optimal Control of Human Response. Automatica 1970, 6, 357–369. [Google Scholar] [CrossRef]
- Mabrok, M.A.; Mohamed, H.K.; Abdel-Aty, A.-H.; Alzahrani, A.S. Human models in human-in-the-loop control systems. J. Intell. Fuzzy Syst. 2020, 38, 2611–2622. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.; Li, H.; Shi, X. Fractional Order Modeling of Human Operator Behavior with Second Order Controlled Plant and Experiment Research. IEEE/CAA J. Autom. Sin. 2016, 30, 271–280. [Google Scholar]
- Martínez-García, M.; Gordon, T. Human control of systems with fractional order dynamics. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016. [Google Scholar]
- Garcia, M.M.; Gordon, T.; Shu, L. Extended Crossover Model for Human-Control of Fractional Order Plants. Fault Diagn. Control Cyber-Phys. Syst. 2017, 5, 27623–27634. [Google Scholar]
- Aydin, Y.; Tokatli, O.; Patoglu, V.; Basdogan, C. Stable Physical Human-Robot Interaction Using Fractional Order Admittance Control. IEEE Trans. Haptics 2017, 7, 2. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.G.; Seong, P.H. Information theoretic approach to man-machine interface complexity evaluation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2001, 31, 163–171. [Google Scholar] [CrossRef]
- Plöchl, M.; Edelmann, J. Driver models in automobile dynamics application. Veh. Syst. Dyn. 2007, 45, 699–741. [Google Scholar] [CrossRef]
- Kondo, M.; Ajimine, A. Driver’s sight point and dynamics of the 900 driver-vehicle-system related to it. SAE Tech. Pap. 1968, 680104, Corpus ID: 61990044. [Google Scholar] [CrossRef]
- Becedas, J. Brain–Machine Interfaces: Basis and Advances. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 825–836. [Google Scholar] [CrossRef]
- Prokop, G. Modeling Human Vehicle Driving by Model Predictive Online Optimization. Veh. Syst. Dyn. 2001, 35, 19–53. [Google Scholar] [CrossRef]
- Salvucci, D.D.; Gray, R. A two-point visual control model of steer-906 ing. Perception 2004, 33, 1233–1248. [Google Scholar] [CrossRef] [PubMed]
- Parasuraman, R.; Sheridan, T.; Wickens, C. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 286–297. [Google Scholar] [CrossRef] [PubMed]
- Hollingworth, A.; Williams, C.; Henderson, J. To see and remember: Visually specific information is retained in memory from previously attended objects in natural scenes. Psychon. Bull. Rev. 2001, 8, 761–768. [Google Scholar] [CrossRef] [PubMed]
- Schlick, C.; Winkelholz, C.; Motz, F.; Luczak, H. Self-generated complexity and human-machine interaction. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2005, 36, 220–232. [Google Scholar] [CrossRef]
- Mabrok, M.; Mohamed, H.; Abdel, A.H.; Alzahrani, A. Human models in human-in-the-loop control systems. J. Intell. Fuzzy Syst. 2019, 38, 2611–2612. [Google Scholar] [CrossRef]
- Liu, Y.K.; Zhang, Y.M. Control of human arm movement in machine-human cooperative welding process. Control Eng. Pract. 2014, 32, 161–171. [Google Scholar] [CrossRef]
- Tejado, I.; Valério, D.; Pires, P.; Martins, J. Fractional order human arm dynamics with variability analyses. Mechatronics 2013, 23, 805–812. [Google Scholar] [CrossRef]
- Gordon, T.J. Nonlinear crossover model of vehicle directional control. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 451–456. [Google Scholar]
- Hollingworth, A.; Richard, A.M.; Luck, S.J. Understanding the function of visual short-term memory: Transsaccadic memory, object correspondence, and gaze correction. J. Exp. Psychol. Gen. 2008, 137, 163. [Google Scholar] [CrossRef]
- Pew, R.W. Some History of Human Performance Modeling; Oxford University Press: Oxford, UK, 2007; pp. 29–44. [Google Scholar] [CrossRef]
- Li, W.; Sadigh, D.; Shankar Sastry, S.; Sanjit, S.A. Synthesis for Human-in-the-Loop Control Systems. In International Conference on Tools and Algorithms for the Construction and Analysis of Systems; Springer: New York, NY, USA, 2014; TACAS 2014; pp. 470–484, Lecture Notes in Computer Science, Book Series LNTCS; Volume 8413. [Google Scholar]
- Aidin, Y.; Tokatli, O.; Patoglu, V.; Basdogan, C. Fractional Order Admittance Control for Physical Human-Robot Interaction. In Proceedings of the 2017 IEEE World Haptics Conference (WHC), Munich, Germany, 6–8 June 2017. [Google Scholar]
- Laurense, V.; Pool, D.; Damveld, H.; Van Paassen, M.; Mulder, M. Effects of Controlled Element Dynamics on Feedforward Manual Control. IEEE Trans. 2015, 45, 253–265. [Google Scholar]
- Wolm, P. Dynamic Stability Control of Front Wheel Drive Wheelchair Using Solid State Accelerometer and Gyroscope. Ph.D. Thesis, University of Canterbury, Canterbury, New Zealand, 2009. [Google Scholar]
- Ivanescu, M.; Popescu, N.; Channa, A.; Poboroniuc, M. Exoskeleton Hand Control by Fractional Order Models. Sensors 2019, 19, 4608. [Google Scholar] [CrossRef] [PubMed]
- Petras, I. Fractional-Order Nonlinear Systems, Modeling, Analysis and Simulation; Higher Education Press: Beijing, China; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Naujoks, F.; Wiedemanna, K.; Schomiga, N.; Jaroschb, O.; Gold, C. Expert-based controllability assessment of control transitions from automated to manual driving. MethodsX 2018, 5, 579–592. [Google Scholar] [CrossRef] [PubMed]
- Aguila-Camacho, N.; Duarte-Mermoud, M.; Callegos, J. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- Argarwal, R.; Hristova, S.; O’Regan, D. Lyapunov functions and strict stability of Caputo fractional differential equations. Adv. Differ. Equ. 2015, 346, 2–20. [Google Scholar]
- Agarwal, R.; Hristova, S.; O’Reagan, D. Remarks on Lyapunov functions to Caputo fractional neural networks. Ann. Acad. Rom. Sci. 2018, 10, 169–176. [Google Scholar]
- Monje, C.; Chen, Y.Q.; Vinagre, B.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls, Fundamental and Applications; Springer: London, UK, 2010. [Google Scholar]
- Khalil, H. Nonlinear Systems; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Lyman Ott, R.; Longnecker, M.T. An Introduction to Statistical Methods and Data Analysis; Cengage Learning, Inc.: Boston, MA, USA, 2006; ISBN 978-1305269477. [Google Scholar]












| Paper | Healthy/ Disability Man | Man Model | Control Techniques | Controller |
|---|---|---|---|---|
| [1,2,8,18] | HP | Linear IOM | Classic Closed Loop Control | IOMC |
| [3,11] | HP | Linear IOM | Fuzzy Control | IOMC |
| [12,16,23] | HP | Linear FOM with time delays | Optimal control techniques | IOMC |
| [4,6] | HP | Linear FOM with time delays | Classic Closed Loop Control | FOMC |
| [13,14,17,21] | HP | Nonlinear FOM with time delays | Cyber-physical control | IOMC |
| [7,23,24] | HP | FOM | Admitance control | IOMC |
| [19] | HP | FOM | Frequency techniques | IOMC |
| [5,20] | HP | Nonlinear IOM with time delays | Algebraic criteria | IOMC |
| [9,10,25] | HP | Linear IOM with time delays | Classic Closed Loop Control | IOMC |
| Our paper | DP | Linear FOM with time delays | Lyapunov techniques and frequency criteria | FOMC or IOMC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanescu, M.; Dumitrache, I.; Popescu, N.; Popescu, D. Fractional Order Model Identification of a Person with Parkinson’s Disease for Wheelchair Control. Fractal Fract. 2023, 7, 23. https://doi.org/10.3390/fractalfract7010023
Ivanescu M, Dumitrache I, Popescu N, Popescu D. Fractional Order Model Identification of a Person with Parkinson’s Disease for Wheelchair Control. Fractal and Fractional. 2023; 7(1):23. https://doi.org/10.3390/fractalfract7010023
Chicago/Turabian StyleIvanescu, Mircea, Ioan Dumitrache, Nirvana Popescu, and Decebal Popescu. 2023. "Fractional Order Model Identification of a Person with Parkinson’s Disease for Wheelchair Control" Fractal and Fractional 7, no. 1: 23. https://doi.org/10.3390/fractalfract7010023
APA StyleIvanescu, M., Dumitrache, I., Popescu, N., & Popescu, D. (2023). Fractional Order Model Identification of a Person with Parkinson’s Disease for Wheelchair Control. Fractal and Fractional, 7(1), 23. https://doi.org/10.3390/fractalfract7010023