Abstract
In this paper, we establish sufficient conditions to approve the existence and uniqueness of solutions of a nonlinear implicit -Hilfer fractional boundary value problem of the cantilever beam model with nonlinear boundary conditions. By using Banach’s fixed point theorem, the uniqueness result is proved. Meanwhile, the existence result is obtained by applying the fixed point theorem of Schaefer. Apart from this, we utilize the arguments related to the nonlinear functional analysis technique to analyze a variety of Ulam’s stability of the proposed problem. Finally, three numerical examples are presented to indicate the effectiveness of our results.
1. Introduction
During the last few decades, elastic beams () have been prominent in the realm of physical science and engineering problems. In particular, the construction of buildings and bridges requires careful computations of the elastic beam equations (s) to assure the safety of the structure. The equations of the problem have been created to represent real situations and their solutions have been provided by different mathematical techniques. s have attracted the interest of many researchers who formulate s in the form of fourth-order ordinary differential equations in various methods. For instance, in 1988, Gupta [1] discussed a fourth-order with two-point boundary conditions as follows:
The problem (1) represents an elastic beam model of length 1 that is restrained at the left end with zero displacement and bending moment, and is free to travel at the right end with a diminishing angular attitude and shear force. Using the Leray–Schauder continuation theorem and Wirtinger-type inequalities, the existence properties of the problem (1) were established. In 2017, Cianciaruso and co-workers [2] studied the fourth-order differential equation of the cantilever beam () model with three-point boundary conditions as follows:
where is a real constant. They proved the existence, non-existence, localization, and multiplicity of nontrivial solutions for problem (2) with their results by using topological methods. Further, the development of s with linear or nonlinear functions under a variety of boundary conditions is more varied and comprehensive. Many works in the literature deal with linear or nonlinear boundary value problems which consist of two or more points; for example, Zhong and co-workers [3] examined fourth-order nonlinear differential equations with the four-point boundary conditions:
where represents non-negative constants, , the points , with , and . By using Krasnoselskii’s fixed point theorem, the existence result is obtained. s with a variety of boundary conditions have been studied in recent years; see [4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25] and references cited therein.
Fractional calculus generalizes the ordinary differentiation and integration of arbitrary order, which may be non-integer order. It is widely utilized in several areas, including engineering and applied science. Different definitions of fractional derivative and integral operators, such as Riemann–Liouville, Caputo, Hilfer, Katugampola, and others, have been discovered. We refer to the thorough investigations in [26,27,28,29,30,31] for a detailed analysis of applications on fractional calculus. In recent years, several research papers have investigated fractional differential equations, the existence results of solutions, and analyzed system stability. One of the most fascinating aspects of differential equations is existence theory. In the previous several decades, a lot of research has been conducted in this field. Various techniques have been used in the current literature to demonstrate the existence and uniqueness of solutions to differential and integral equations. In addition, one of the most powerful techniques for stability analysis is Ulam’s stability, which includes Ulam–Hyers () stability, generalized Ulam–Hyers () stability, Ulam–Hyers–Rassias () stability, and generalized Ulam–Hyers–Rassias () stability. It is useful because the properties of Ulam’s stability guarantee the existence of solutions, and when the problem under consideration is Ulam’s stability, it ensures that a close exact solution exists; see [32,33,34,35,36,37,38,39,40,41,42] and references cited therein.
In response to the foregoing discussions, we study a class of nonlinear implicit -Hilfer fractional integro-differential equations with nonlinear boundary conditions describing the model of the form:
where denotes the -Hilfer fractional derivative operators of order , , , , , , , for , , and . denotes the -Riemann–Liouville fractional integral of order , , , and , .
The major goal of this paper is to use well-known fixed point theorems such as Banach’s and Schaefer’s to show the existence and uniqueness of the solution for the problem of (4). The different types of Ulam’s stability, such as stability, stability, stability, and stability, are used to investigate the stability of the solution for problem (4). Finally, we illustrate examples of various functions that are investigated to verify the theoretical results.
The rest of this paper is assembled as follows: In Section 2, we introduce some notations, definitions, lemmas, and essential results. The existence and uniqueness results are obtained by helping the fixed point theorems in Section 3. By using the nonlinear functional analysis technique, we analyzed a variety of Ulam’s stabilities for the proposed problem in Section 4. In Section 5, we present examples to guarantee the validity of the obtained results. The conclusion of this paper is presented at the end.
2. Preliminaries
We present a brief overview of the fundamental concepts of -Hilfer fractional calculus as well as essential key results that will be employed in this paper.
Let be the Banach space of continuous functions on equipped with the supnorm . Let be the space of n-times absolutely continuous functions where .
Definition 1
(The -Riemann–Liouville fractional integral operator [43]). Let be a finite or infinite interval of the half-axis . Let be an increasing function with for each . The ψ-Riemann–Liouville fractional integral of order α of a function f depending on the function ψ on is defined by
where represents the (Euler) Gamma function.
Definition 2
(The -Riemann–Liouville fractional derivative operator [43]). Let be define as in Definition 1 with . The ψ-Riemann–Liouville fractional derivative of a function f depending on the function ψ is defined as or
where and represents the integer part of .
Definition 3
(The -Hilfer fractional derivative operator [44]). Let , with , and be increasing with for each . Then, the ψ-Hilfer fractional derivative of type of a function f, depending on the function ψ, is defined as
where .
Lemma 1
(The semigroup property [43]). Let . Then , .
Proposition 1
([43,44]). Let and consider . Then, for and , the following properties:
- (i)
- ;
- (ii)
- ;
- (iii)
- .
Lemma 2
([44]). Let , , , and . Then,
for all , where .
Lemma 3
([36]). Let , , n, , , and . If , then .
Lemma 4.
Let , , , , (, ) with , and . Assume that . Then, is a solution of
if and only if x satisfies the integral equation
where
Proof.
Let be a solution of (5). Applying on both sides of (5) with Lemma 2 , we have
where for . Taking the operator into (9), we obtain
3. Existence and Uniqueness Results
For the sake of this paper, we set the notations and , where
with , for , . According to Lemma 4, we define and
Clearly, the -Hilfer fractional boundary value problem () describing the model (4) has solutions if and only if has fixed points. For the tightness of calculation in this manuscript, we set the constants
3.1. Uniqueness Result
In the first our criteria, we will analyze the uniqueness result of the solution for the -Hilfer describing the model (4) by applying Banach’s fixed point theorem (Lemma 5).
Lemma 5
(Banach’s fixed point theorem [45]). Let S be a non-empty closed subset of a Banach space . Then, any contraction mapping from into itself has a unique fixed point.
Theorem 1.
Let be continuous and
- There exist positive constants , , with , such thatfor any , , , and .
- There exist positive constants , such thatfor any , and .
Proof.
We transform the -Hilfer describing the model (4) into , where is defined by (12). Clearly, the fixed points of are the possible solutions of the -Hilfer describing the model (4). From Lemma 5, we will verify that has a unique fixed point, which means that the -Hilfer describing the model (4) has a unique solution.
Firstly, define a bounded, closed, convex and nonempty subset with
where for i, , and are given by (7), (8), (14) and (15), respectively.
Let , , . The process of proof will be divided in two steps:
Step I..
Let and . Then,
By applying Proposition 1 (i), we have
From (20) with Proposition 1 (i), we can compute that
Thus,
which implies that . Then, .
Step II. is a contraction.
Let x, and for any . Then, we have
3.2. Existence Result
The second result is proved by applying Schaefer’s fixed point theorem (Lemma 6).
Lemma 6.
(Schaefer’s fixed point theorem [45].) Let be a Banach space and is a completely continuous operator and the set is bounded. Then, has a fixed point in .
Theorem 2.
Let be continuous. Assume that:
- There exist non-negative continuous functions such thatwith , , and .
- There exist non-negative continuous functions , such thatwith and , .
Then, the ψ-Hilfer describing model (4) has at least one solution on .
Proof.
The process will be analyzed in four steps as follows.
Step I. is continuous.
Let be a sequence such that . Then, for any , we have
The continuity of f implies the continuity of . Then, , , as , Hence, is continuous.
Step II. maps bounded set into bounded set in .
For , there is such that, for each where , then .
For any and , we obtain
From –, it follows that
Inserting (29)–(31) in (28), we can compute that
which implies that
Then, maps bounded set into bounded set in .
Step III. maps bounded sets into equicontinuous sets of .
For and where as defined in Step II, by using the property that f is a bounded on the compact set , we estimate
By setting , , and , then
Note that the right hand-side of the above inequality is independent of the unknown variable x and tends to zero as . Hence, is equicontinuous. Then, is relatively compact on . We apply the Arzelá–Ascoli theorem, which implies that is completely continuous.
Step IV. The set is a bounded (a priori bounds).
Let , then for some . From –, for any , then
It follows from Step II, and for any , that . Then, is a bounded set.
Using Theorem 2, we find that there exists such that . Thanks to Lemma 6, has at least one fixed point, which is the corresponding solution of the -Hilfer describing the model (4). □
4. Ulam’s Stability Results
In this section, we analyze the stability, stability, stability, and stability of the solution to the -Hilfer describing the model (4).
Definition 4.
Definition 5.
Definition 6.
Definition 7.
Remark 1.
It is easy to see that Definition 4 ⇒ Definition 5; Definition 6 ⇒ Definition 7; Definition 6 for ⇒ Definition 4.
Remark 2.
A functionis a solution of (32) if and only if there exists a function (where v depends on solution z) such that: , ; , .
Remark 3.
A functionis a solution of (34) if and only if there exists a function (where w depends on solution z) such that: , ; , .
Remark 4.
There exists an increasing function and there exists a positive constant , such that, for each , we have the integral inequality
4.1. The and Stability Results
Firstly, we present an important lemma that will be used in the analyses of and stability of the -Hilfer describing the model (4).
Lemma 7.
Proof.
Let z be the solution of (32). Thanks to Remark 2 and Lemma 4, we obtain
Then, the solution of (42) can be written as
Remark 2 implies that
Lemma 7 is obtained. □
Now, we prove the and stability of solution to the -Hilfer describing the model (4).
Theorem 3.
Let be continuous, and let – be verified with
Then, the ψ-Hilfer describing the model (4) is and -stable in .
4.2. The and Stability Results
This lemma will be used in the proofs of and stability of our results.
Proof.
Let z be a solution of (34). Thanks to Remark 3 (ii) and Lemma 4, the solution of
can be written in the form:
By using Remark 3 with Remark 4, we obtain the following estimation:
Lemma 8 is obtained. □
Next, we establish the and stability of the solution to the -Hilfer describing the model (4).
Theorem 4.
Proof.
Let be the solution of (34) and x be a unique solution of (4). Thanks to Lemma 8, we obtain
where is given by (43). Similarly, if , , , , , and , then . Applying the triangle inequality with Lemma 8, for , we estimate
where is defined by (44). Then, with
Hence, this proves that the -Hilfer describing the model (4) is -stable. Moreover, if we set with , then the -Hilfer describing model (4) is -stable. □
5. Examples
This section contains several illustrated cases to highlight the relevance of our findings in this study.
Example 1.
Consider the following ψ-Hilfer fractional differential equation describing the model with nonlinear boundary conditions
Here,, , , , , , , , , , , , , , , , and . From the given information, we can approximate that, , , , and.
- (i)
- Consider the nonlinear functionand the nonlinear conditionsFor , , , , and , we can find thatandThe assumption–is satisfied with, , , and . For the given information, we have , , , , and . Hence,Since all the assumptions of Theorem 1 are fulfilled, the ψ-Hilferdescribing themodel (46) has a unique solution on with (47) and (48). Furthermore, we can also compute the positive constant . By the conclusions of Theorem 3, the ψ-Hilfer describing the model (46) is both - and also -stable on with (47) and (48). By setting and Proposition 1 (i), we have
- (ii)
- Consider the nonlinear functionFor u, v, , and , we can estimateandThe assumptions–is true with, , , , , and. Therefore, all the assumptions of Theorem 2 are satisfied, which leads to the conclusion that the ψ-Hilferdescribingmodel (46) has at least one solution on with (48) and (49). For , , , , and , we can find thatThe assumption–is satisfied with, , and. Hence,Since all the assumptions of Theorem 1 are fulfilled, the ψ-Hilferdescribingmodel (46) has a unique solution on with (48) and (49). Further, we can also compute that . By the conclusions of Theorem 3, the ψ-Hilfer model (46) is both - and also -stable on with (48) and (49). By setting and Proposition 1 (i), one has
- (iii)
- Consider the function, and the nonlinear conditions. By Lemma 4, the implicit solution of the ψ-Hilferdescribing themodel (46) is given by
- (1)
- (2)
- (3)
- (4)
A graph representing the solution of the ψ-Hilferdescribingmodel (46) with various values of , , , , , and involving a variety of functions , , , and , is shown in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8.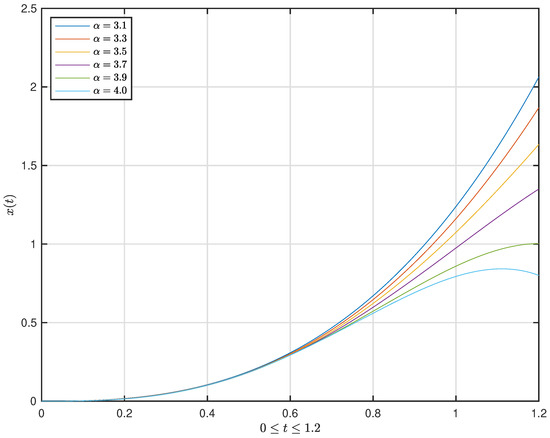 Figure 1. The graph of the solution with and .
Figure 1. The graph of the solution with and .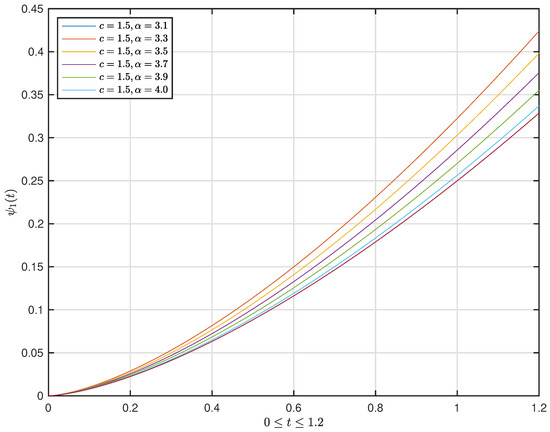 Figure 2. The graph of the function with .
Figure 2. The graph of the function with .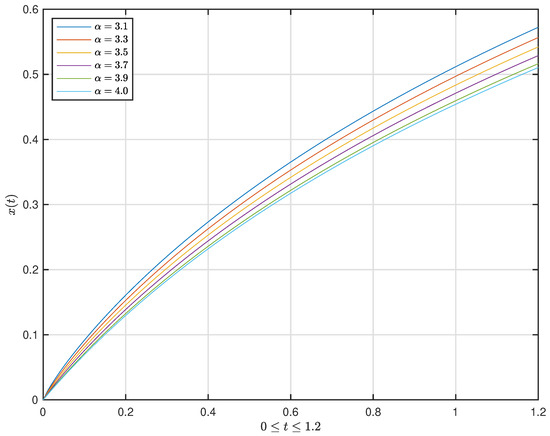 Figure 3. The graph of the solution with and .
Figure 3. The graph of the solution with and .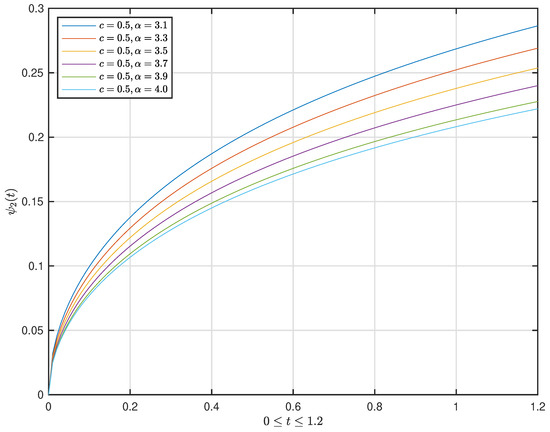 Figure 4. The graph of the function with .
Figure 4. The graph of the function with .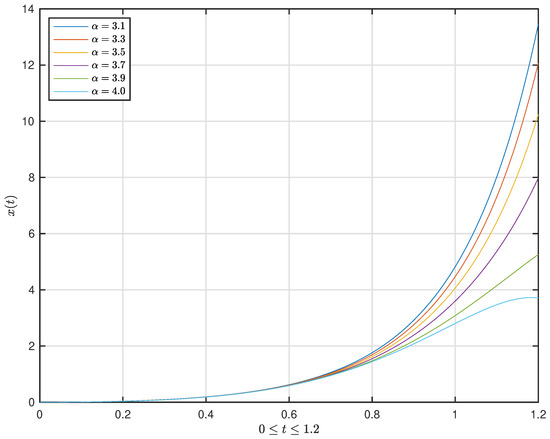 Figure 5. The graph of the solution with and .
Figure 5. The graph of the solution with and .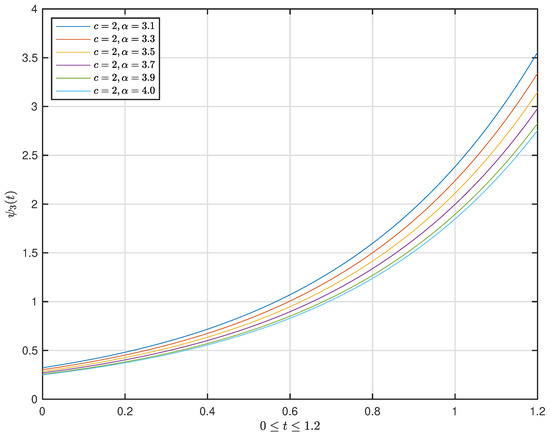 Figure 6. The graph of the function with .
Figure 6. The graph of the function with .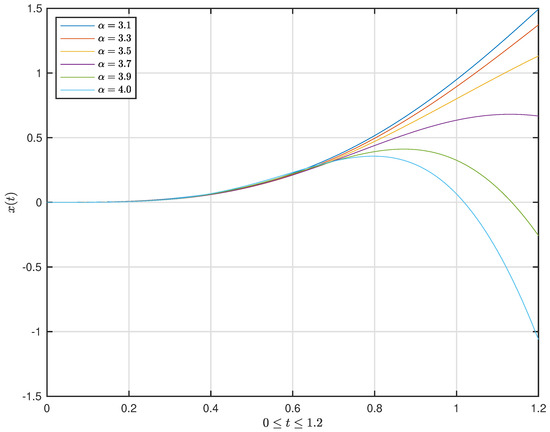 Figure 7. The graph of the solution with and .
Figure 7. The graph of the solution with and .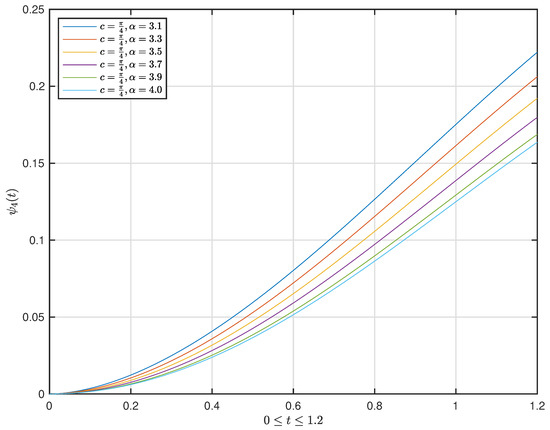 Figure 8. The graph of the function with .
Figure 8. The graph of the function with .
6. Conclusions
We analyzed the existence and uniqueness of solutions for a class of a nonlinear implicit -Hilfer fractional integro-differential equation subjected to nonlinear boundary conditions describing the model. The uniqueness result is established using Banach’s fixed point theorem, while the existence result is established using Schaefer’s fixed point theorem, both of which are well-known fixed point theorems. Ulam’s stability is also demonstrated in several ways, including stability, stability, stability, and stability. Finally, the numerical examples have been carefully selected to demonstrate how the results can be used. Moreover, the -Hilfer describing the model (4) not only includes the identified previously works about a variety of boundary value problems. As special cases for various values and , the considered problem does cover a large range of many problems as: the Riemann–Liouville-type problem for and , the Caputo-type problem for and , the -Riemann–Liouville-type problem for , the -Caputo-type problem for , the Hilfer-type problem for , the Hilfer–Hadamard-type problem for , and the Katugampola-type problem for .
As a result, the fixed point technique is a powerful tool to investigate different nonlinear problems, which is very important in various qualitative theories. The present work is innovative and attractive and significantly contributes to the body of knowledge on -Hilfer fractional differential equations and inclusions for researchers. In addition, our results are novel and intriguing for the elastic beam problem emerging from mathematical models of engineering and applied science.
Author Contributions
Conceptualization, K.K., W.S., C.T., J.K. and J.A.; methodology, K.K., W.S., C.T., J.K. and J.A.; software, K.K., W.S. and C.T.; validation, K.K., W.S., C.T., J.K. and J.A.; formal analysis, K.K., W.S. and J.A.; investigation, K.K., W.S., C.T., J.K. and J.A.; resources, K.K., W.S., C.T., J.K. and J.A.; data curation, K.K., W.S., C.T., J.K. and J.A.; writing—original draft preparation, K.K., W.S., C.T., J.K. and J.A.; writing—review and editing, W.S., C.T., J.K. and J.A.; visualization, K.K., W.S., C.T., J.K. and J.A.; supervision, W.S., C.T. and J.A.; project administration, K.K., W.S. and J.K.; funding acquisition, K.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing not applicable.
Acknowledgments
K. Kotsamran was partially supported by Kasetsart University, Chalermphrakiat Sakon Nakhon Province Campus. C. Thaiprayoon and J. Kongson would like to express thanks to Burapha University and the Center of Excellence in Mathematics (CEM), CHE, Sri Ayutthaya Rd., Bangkok, 10400, Thailand. J. Alzabut is thankful to Prince Sultan University and OSTİM Technical University for their support.
Conflicts of Interest
The authors declare that they have no competing interests.
References
- Gupta, C.P. Existence and uniqueness theorems for the bending of an elastic beam equation. Appl. Anal. 1988, 26, 289–304. [Google Scholar] [CrossRef]
- Cianciaruso, F.; Infante, G.; Pietramala, P. Solutions of perturbed hammerstein integral equations with applications. Nonlinear Anal. Real World Appl. 2017, 33, 317–347. [Google Scholar] [CrossRef]
- Zhong, Y.; Chen, S.; Wang, C. Existence results for a fourth-order ordinary differential equation with a four-point boundary condition. Appl. Math. Lett. 2008, 21, 465–470. [Google Scholar] [CrossRef]
- Ma, R.Y. Multiplicity of positive solutions for second-order three-point boundary value problems. Comput. Math. Appl. 2000, 40, 193–204. [Google Scholar] [CrossRef]
- Chen, S.; Ni, W.; Wang, C. Positive solution of order ordinary differential equation with four-point boundary conditions. Appl. Math. Lett. 2006, 19, 161–168. [Google Scholar] [CrossRef]
- Tuz, M. The Existence of symmetric positive solutions of fourth-order elastic beam equations. Symmetry 2019, 11, 121. [Google Scholar] [CrossRef]
- Sang, Y.; Ren, Y. Nonlinear sum operator equations and applications to elastic beam equation and fractional differential equation. Boun. Value Prob. 2019, 2019, 1–25. [Google Scholar] [CrossRef]
- Alzabut, J.; Selvam, A.G.M.; Dhineshbabu, R.; Kaabar, M.K.A. The existence, uniqueness, and stability analysis of the discrete fractional three-point boundary value problem for the elastic beam equation. Symmetry 2021, 13, 789. [Google Scholar] [CrossRef]
- Bonanno, G.; Chinnì, A.; Tersian, S.A. Existence results for a two point boundary value problem involving a fourth-order equation. Electron. J. Qual. Theory Differ. Equ. 2015, 33, 1–9. [Google Scholar] [CrossRef]
- Bouteraa, N.; Benaicha, S.; Djourdem, H.; Benattia, M.E. Positive solutions of nonlinear fourth-order two-point boundary value problem with a parameter. Rom. J. Math. Comput. Sci. 2018, 8, 17–30. [Google Scholar]
- Sun, J.P.; Wang, X.Y. Positive solution for fourth-order four-point Sturm-Liouville boundary value problem. J. Appl. Math. Inform. 2010, 28, 679–686. [Google Scholar]
- Aslami, M.; Akimov, P.A. Analytical solution for beams with multipoint boundary conditions on two-parameter elastic foundations. Arch. Civ. Mech. Eng. 2016, 16, 668–677. [Google Scholar] [CrossRef]
- Song, Y. A nonlinear boundary value problem for fourth-order elastic beam equations. Bound. Value Probl. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Li, Y. Existence of positive solutions for the cantilever beam equations with fully nonlinear terms. Nonlinear Anal. Real World Appl. 2016, 27, 221–237. [Google Scholar] [CrossRef]
- Li, S.; Zhai, C. New existence and uniqueness results for an elastic beam equation with nonlinear boundary conditions. Bound. Value Probl. 2015, 104, 1–12. [Google Scholar] [CrossRef]
- Faraji Oskouie, M.; Ansari, R.; Rouhi, H. Bending analysis of functionally graded nanobeams based on the fractional nonlocal continuum theory by the variational Legendre spectral collocation method. Meccanica 2018, 53, 1115–1130. [Google Scholar] [CrossRef]
- Sidhardh, S.; Patnaik, S.; Semperlotti, F. Fractional-order structural stability: Formulation and application to the critical load of nonlocal slender structures. Int. J. Mech. Sci. 2021, 201, 106443. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. On the fractional deformation of a linearly elastic bar. J. Mech. Behav. Mater. 2020, 29, 9–18. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. On fractional bending of beams. Arch. Appl. Mech. 2016, 86, 1133–1145. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G.; Zingales, M. Finite-Element Formulation of a Nonlocal Hereditary Fractional-Order Timoshenko Beam. J. Eng. Mech. 2015, 143, D4015001. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional Mechanics of Elastic Solids: Continuum Aspects. J. Eng. Mech. 2016, 143, D4016001. [Google Scholar] [CrossRef]
- Failla, G. Stationary Response of Beams and Frames with Fractional Dampers through Exact Frequency Response Functions. J. Eng. Mech. 2016, 143, D4016004. [Google Scholar] [CrossRef]
- Sumelka, W.; Blaszczyk, T.; Liebold, C. Fractional Euler-Bernoulli beams: Theory, numerical study and experimental validation. Eur. J. Mech.—A/Solids 2015, 54, 243–251. [Google Scholar] [CrossRef]
- Sidhardh, S.; Patnaik, S.; Semperlotti, F. Geometrically nonlinear response of a fractional-order nonlocal model of elasticity. Int. J. Non-Linear Mech. 2020, 125, 103529. [Google Scholar] [CrossRef]
- Stempin, P.; Sumelka, W. Space-Fractional Euler-Bernoulli beam model theory and identification for silver nanobeam bending. Int. J. Mech. Sci. 2020, 186, 105902. [Google Scholar] [CrossRef]
- Kumar, A.; Chauhan, H.V.S.; Ravichandran, C.; Nisar, K.S.; Baleanu, D. Existence of solutions of non-autonomous fractional differential equations with integral impulse condition. Adv. Differ. Equ. 2020, 434, 1–15. [Google Scholar] [CrossRef]
- Ismail, M.; Saeed, U.; Alzabut, J.; Rehman, M. Approximate solutions for fractional boundary value problems via green-cas wavelet method. Mathematics 2019, 7, 1164. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Katugampola, U.N. A new approach to generalized fractional derivatives. Bull. Math. Anal. Appl. 2014, 6, 1–15. [Google Scholar]
- Almeida, R. A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 2017, 44, 460–481. [Google Scholar] [CrossRef]
- Abdo, M.S.; Shah, K.; Panchal, S.K.; Wahash, H.A. Existence and Ulam stability results of a coupled system for terminal value problems involving ψ-Hilfer fractional operator. Adv. Differ. Equ. 2020, 2020, 316. [Google Scholar] [CrossRef]
- Asawasamrit, S.; Nithiarayaphaks, W.; Ntouyas, S.K.; Tariboon, J. Existence and stability analysis for fractional differential equations with mixed nonlocal conditions. Mathematics 2019, 7, 117. [Google Scholar] [CrossRef]
- Sousa, J.V.D.C.; de Oliveira, E.C. On the Ulam–Hyers–Rassias stability for nonlinear fractional differential equations using the ψ-Hilfer operator. J. Fixed Point Theory Appl. 2018, 20, 96. [Google Scholar] [CrossRef]
- Harikrishman, S.; Elsayed, E.; Kanagarajan, K. Existence and uniqueness results for fractional pantograph equations involving ψ-Hilfer fractional derivative. Dyn. Contin. Discrete Impuls. Syst. 2018, 25, 319–328. [Google Scholar]
- Ahmed, I.; Kuman, P.; Shah, K.; Borisut, P.; Sitthithakerngkiet, K.; Demba, M.A. Stability results for implicit fractional pantograph differential equations via ψ-Hilfer fractional derivative with a nonlocal Riemann–Liouville fractional integral condition. Mathematics 2020, 8, 94. [Google Scholar] [CrossRef]
- Thaiprayoon, C.; Sudsutad, W.; Alzabut, J.; Etemad, S.; Rezapour, S. On the qualitative analysis of the fractional boundary value problem describing thermostat control model via ψ-Hilfer fractional operator. Adv. Differ. Equ. 2021, 2021, 1–28. [Google Scholar] [CrossRef]
- Baitiche, Z.; Derbazi, C.; Alzabu, J.; Samei, M.E.; Kaabar, M.K.A.; Siri, Z. Monotone iterative method for ψ-Caputo fractional differential equation with nonlinear boundary conditions. Fractal Fract. 2021, 5, 81. [Google Scholar] [CrossRef]
- Seemab, A.; Rehman, M.U.; Alzabut, J.; Adjabi, Y.; Abdo, M.S. Langevin equation with nonlocal boundary conditions involving a ψ-Caputo fractional operators of different orders. AIMS Math. 2021, 6, 6749–6780. [Google Scholar] [CrossRef]
- Alzabut, J.; Adjabi, Y.; Sudsutad, W.; Rehman, M.U. New generalizations for Gronwall type inequalities involving a ψ-fractional operator and their applications. AIMS Math. 2021, 6, 5053–5077. [Google Scholar] [CrossRef]
- Sitho, S.; Ntouyas, S.K.; Samadi, A.; Tariboon, J. Boundary value problems for ψ-Hilfer type sequential fractional differential equations and inclusions with integral multi-point boundary conditions. Mathematics 2021, 9, 1001. [Google Scholar] [CrossRef]
- Rezapour, S.; Etemad, S.; Tellab, B.; Agarwal, P.; Guirao, J.L.G. Numerical solutions caused by DGJIM and ADM methods for multi-term fractional BVP involving the generalized ψ-RL-operators. Symmetry 2021, 13, 532. [Google Scholar] [CrossRef]
- Boutiara, A.; Etemad, S.; Hussain, A.; Rezapour, S. The generalized U-H and U-H stability and existence analysis of a coupled hybrid system of integro-differential IVPs involving ϕ-Caputo fractional operators. Adv. Differ. Equ. 2021, 95, 1–21. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and applications of the fractional differential equations. In North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Vanterler, J.; de Oliveira, E.C. On the ψ-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 72–91. [Google Scholar] [CrossRef]
- Granas, A.; Dugundji, J. Fixed Point Theory; Springer: New York, NY, USA, 2003. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).