
Finite Element Formulation of Fractional Constitutive Laws Using the Reformulated Infinite State Representation


Abstract
:1. Introduction
2. Fractional Calculus and the Reformulated Infinite State Representation
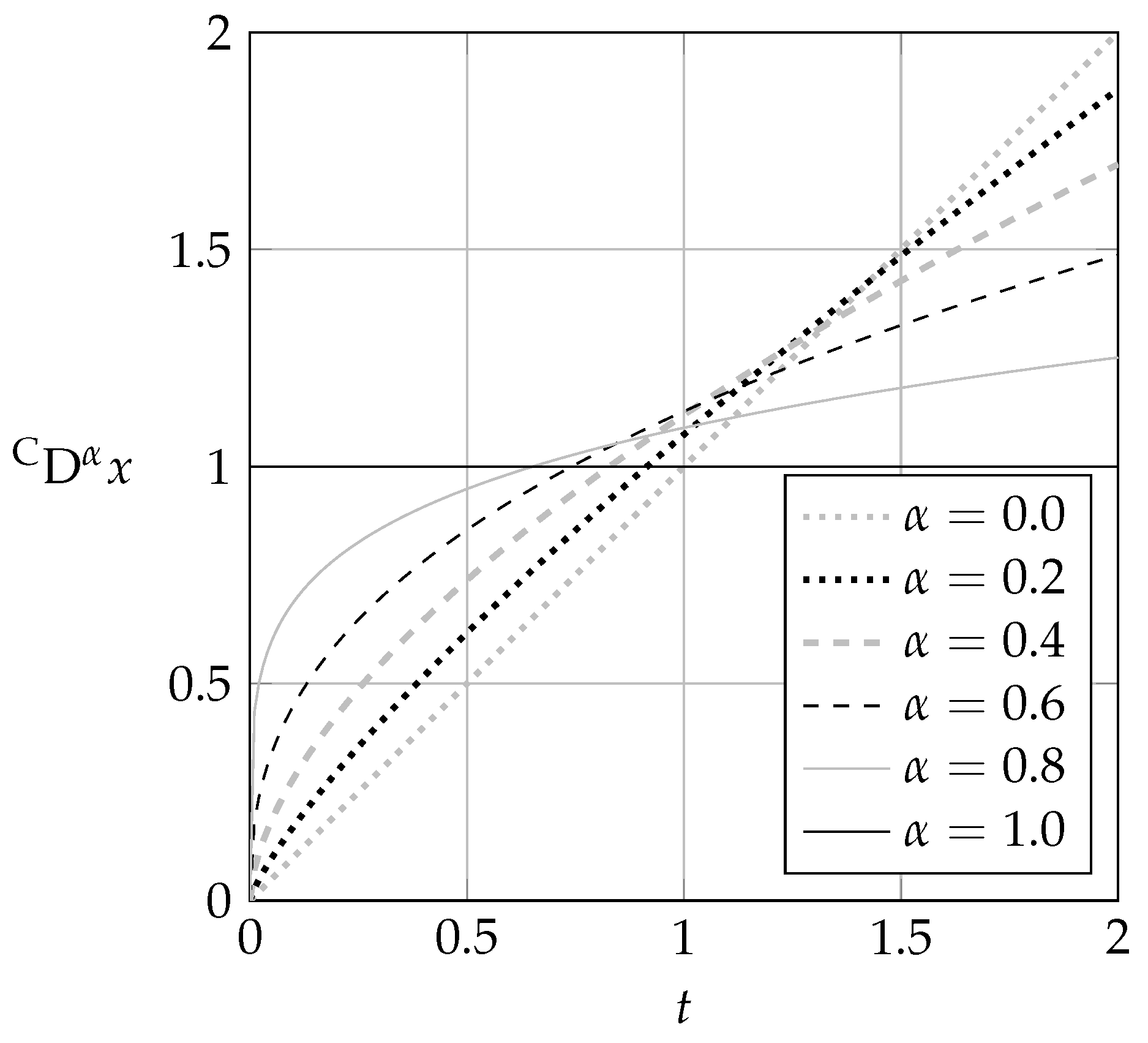
2.1. Definitions and Properties
2.2. Infinite State Representation
2.3. Reformulated Infinite State Representation
2.4. Reformulated Infinite State Scheme
3. Fractional Viscoelasticity
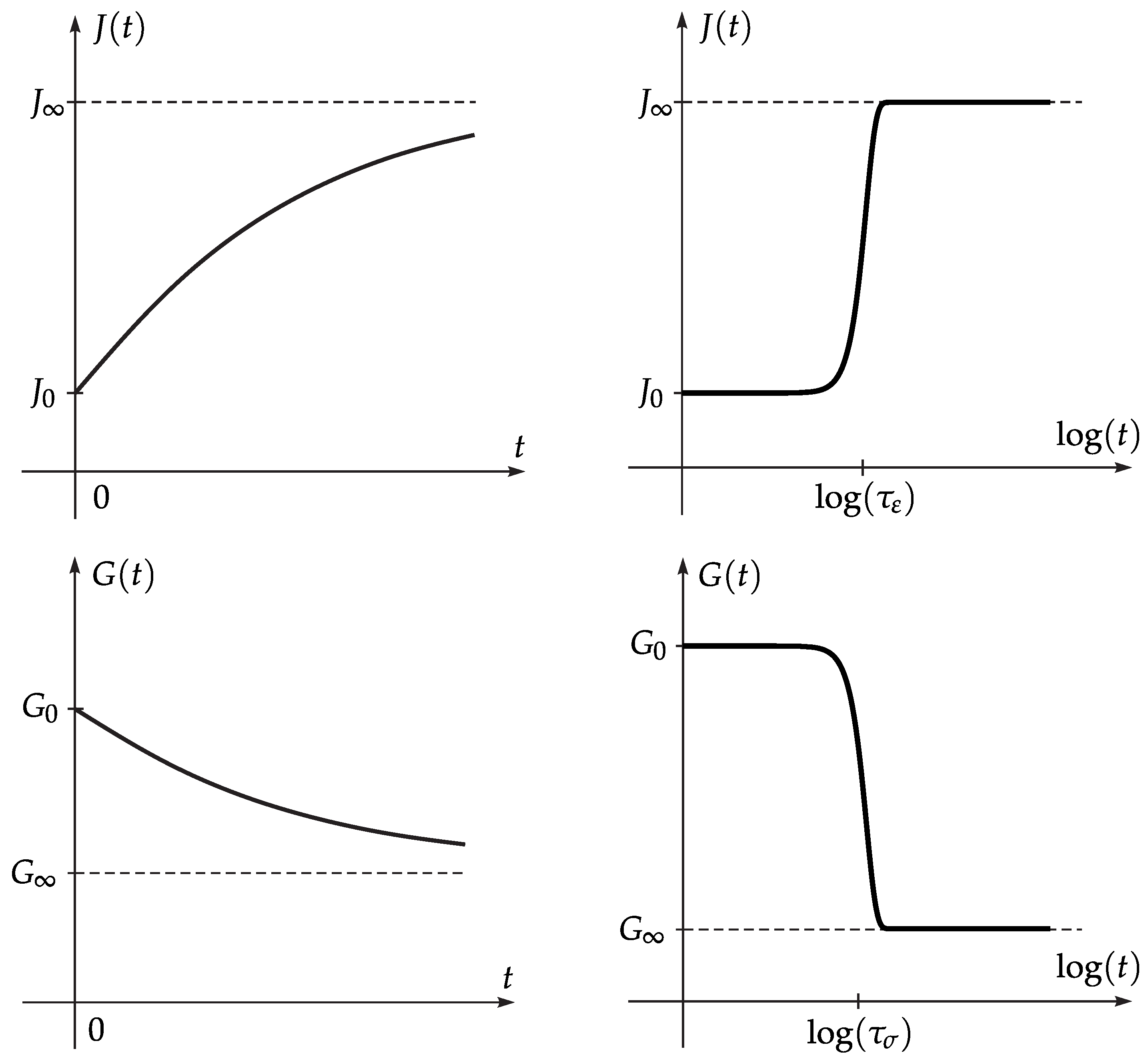
3.1. Introduction to Linear Viscoelasticity
- causality (no future stress resp. strain state can affect the current strain resp. stress state),
- linearity (the principle of superposition holds) and
- non-aging (the material behavior is independent of shifts in time).
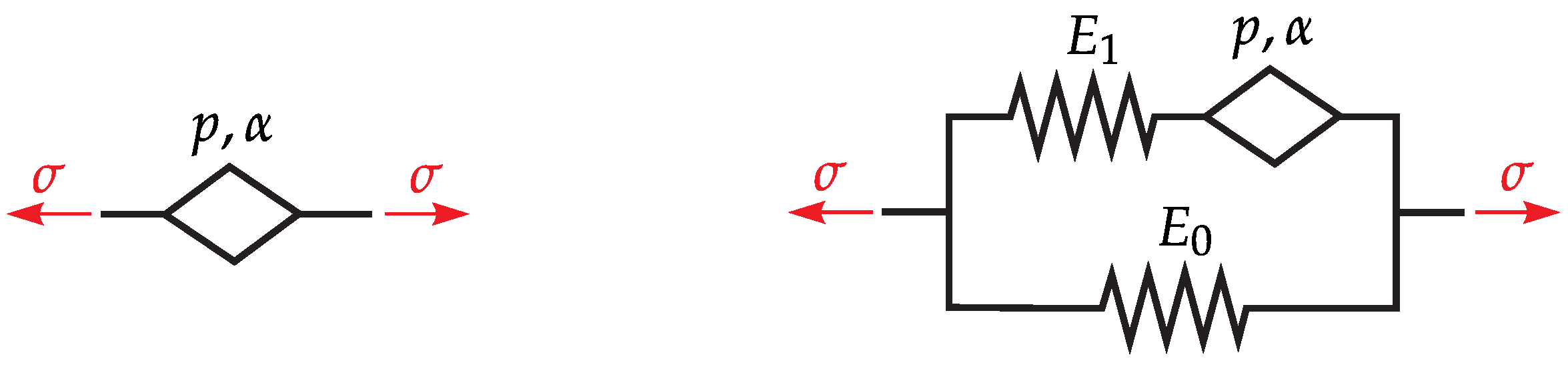
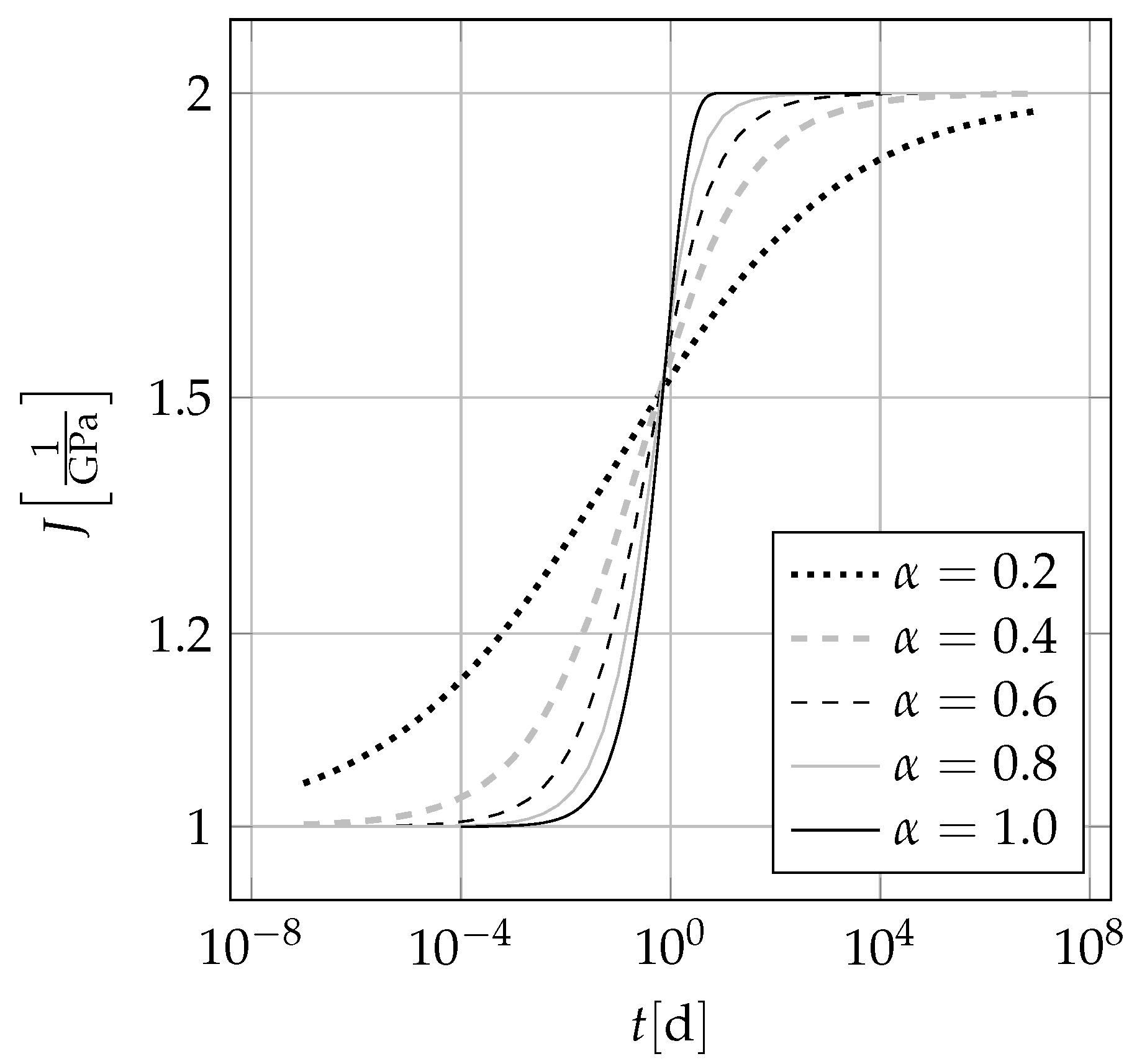
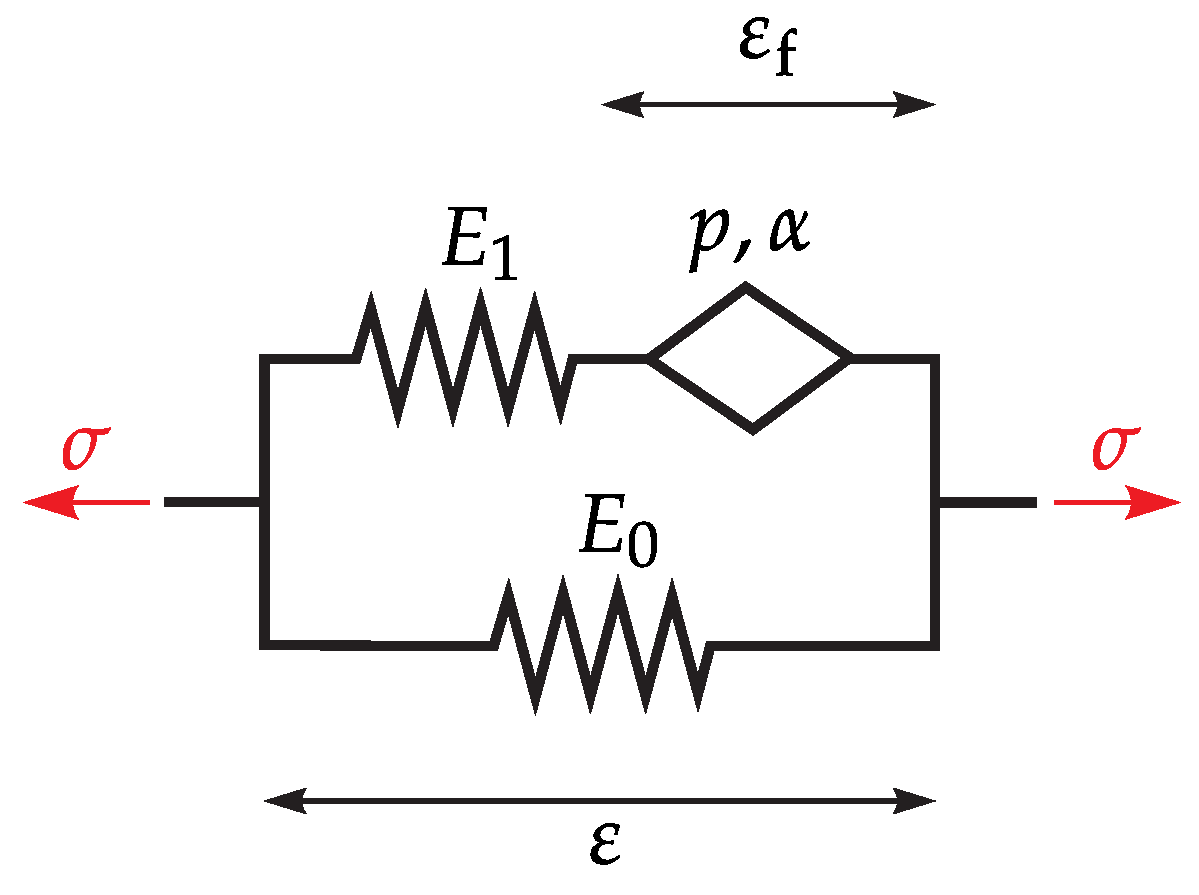
3.2. Fractional Zener Model
4. Finite Element Method
4.1. Formulation of the Fractional Zener Model for a 3D Continuum
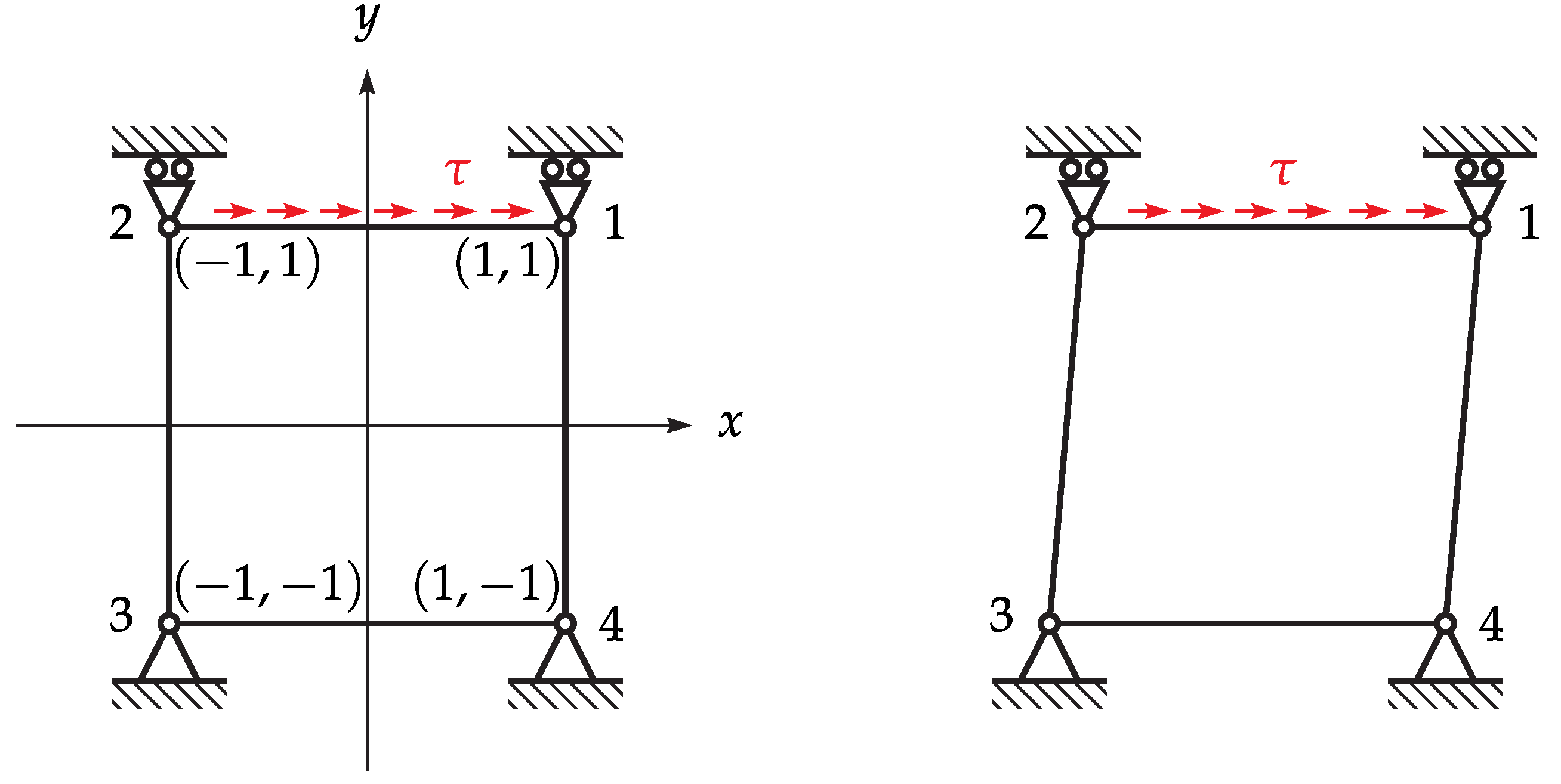
4.2. FEM Formulation
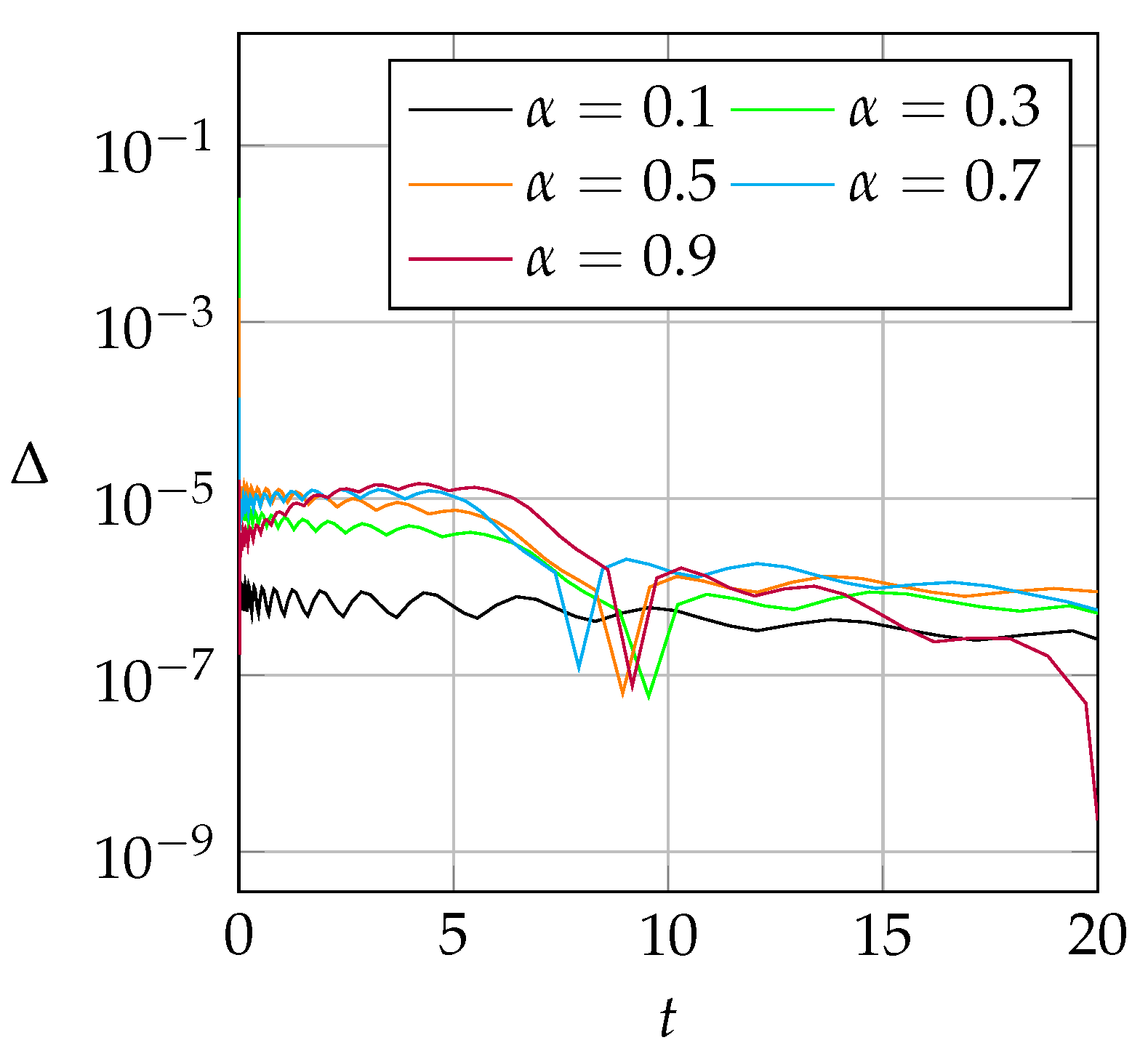
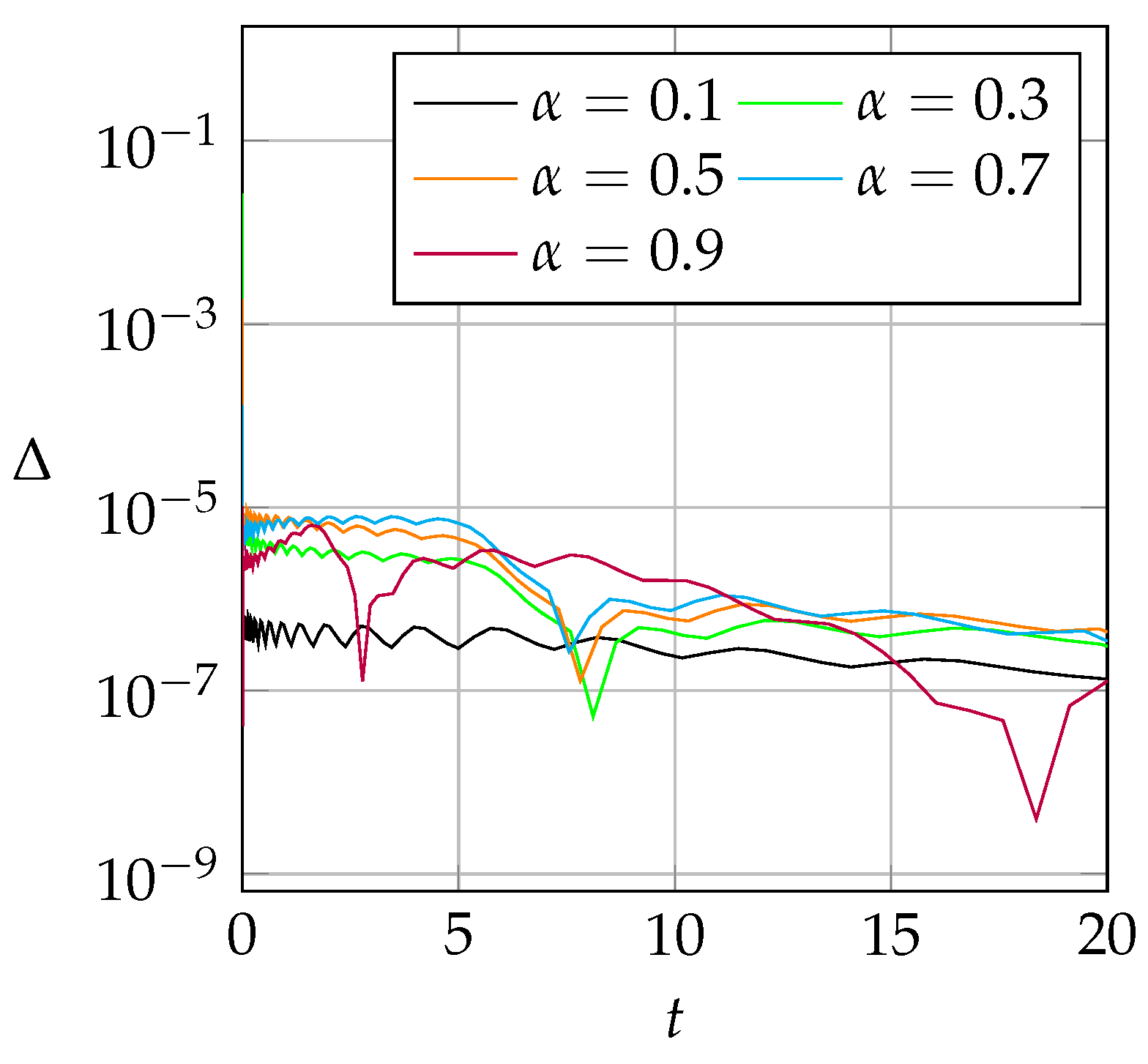
4.3. Numerical Implementation
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bagley, R.L.; Torvik, P.J. Fractional calculus in the transient analysis of viscoelastically damped structures. AIAA J. 1985, 23, 918–925. [Google Scholar] [CrossRef]
- Schmidt, A.; Gaul, L. Finite element formulation of viscoelastic constitutive equations using fractional time derivatives. Nonlinear Dyn. 2002, 29, 37–55. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Lecture Notes in Mathematics; Springer: Berlin, Germany, 2010; Volume 2004. [Google Scholar]
- Podlubny, I. Fractional Differential Equations. An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1999; Volume 198. [Google Scholar]
- Oldham, K.; Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order; Academic Press: New York, NY, USA; London, UK, 1974. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Gemant, A. A method of analyzing experimental results obtained from elasto-viscous bodies. Physics 1936, 7, 311–317. [Google Scholar] [CrossRef]
- Scott Blair, G.W. The role of psychophysics in rheology. J. Colloid Sci. 1947, 2, 21–32. [Google Scholar] [CrossRef]
- Gerasimov, A. A generalization of linear laws of deformation and its application to problems of internal friction. Prikl. Mat. I Mekhanika 1948, 12, 251–260. [Google Scholar]
- Rabotnov, Y.N. Equilibrium of an elastic medium with after effect. Prikl. Mat. I Mekhanika 1948, 12, 81–91. [Google Scholar] [CrossRef]
- Nolle, A.W. Dynamic mechanical properties of rubberlike materials. J. Polym. Sci. 1950, 5, 1–54. [Google Scholar] [CrossRef]
- Caputo, M.; Mainardi, F. Linear models of dissipation in anelastic solids. Rivista del Nuovo Cimento 1971, 1, 161–198. [Google Scholar] [CrossRef]
- Koeller, R.C. Applications of Fractional Calculus to the Theory of Viscoelasticity. J. Appl. Mech. 1984, 51, 299–307. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the fractional calculus model of viscoelastic behavior. J. Rheol. 1986, 30, 133–155. [Google Scholar] [CrossRef]
- Lion, A. Thermomechanically consistent formulations of the standard linear solid using fractional derivatives. Arch. Mech. 2001, 53, 253–273. [Google Scholar]
- Celauro, C.; Fecarotti, C.; Pirrotta, A.; Collop, A.C. Experimental validation of a fractional model for creep/recovery testing of asphalt mixtures. Constr. Build. Mater. 2012, 36, 458–466. [Google Scholar] [CrossRef]
- di Paola, M.; Granata, M.F. Fractional model of concrete hereditary viscoelastic behaviour. Arch. Appl. Mech. 2016, 87, 335–348. [Google Scholar] [CrossRef]
- Su, X.; Chen, W.; Xu, W.; Liang, Y. Non-local structural derivative Maxwell model for characterizing ultra-slow rheology in concrete. Constr. Build. Mater. 2018, 190, 342–348. [Google Scholar] [CrossRef]
- Matignon, D. Stability properties for generalized fractional differential systems. ESAIM Proc. 1998, 5, 145–158. [Google Scholar] [CrossRef] [Green Version]
- Montseny, G. Diffusive representation of pseudo-differential time-operators. ESAIM Proc. 1998, 5, 159–175. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. State variables and transients of fractional order differential systems. Comput. Math. Appl. 2012, 64, 3117–3140. [Google Scholar] [CrossRef] [Green Version]
- Trigeassou, J.C.; Maamri, N.; Oustaloup, A. Lyapunov stability of commensurate fractional order systems: A physical interpretation. J. Comput. Nonlinear Dyn. 2016, 11, 051007. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differential equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. Transients of fractional-order integrator and derivatives. Signal Image Video Process. 2012, 6, 359–372. [Google Scholar] [CrossRef]
- Yuan, L.; Agrawal, O.P. A numerical scheme for dynamic systems containing fractional derivatives. J. Vib. Acoust. 2002, 124, 321–324. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.J.; Chatterjee, A. Galerkin projections and finite elements for fractional order derivatives. Nonlinear Dyn. 2006, 45, 183–206. [Google Scholar] [CrossRef]
- Li, J.R. A fast time stepping method for evaluating fractional integrals. SIAM J. Sci. Comput. 2010, 31, 4696–4714. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Zhang, J.; Zhang, Q.; Zhang, Z. Fast evaluation of the Caputo fractional derivative and its applications to fractional diffusion equations. Commun. Comput. Phys. 2017, 21, 650–678. [Google Scholar] [CrossRef]
- Baffet, D. A Gauss-Jacobi kernel compression scheme for fractional differential equations. J. Sci. Comput. 2019, 79, 227–248. [Google Scholar] [CrossRef] [Green Version]
- Bagley, R.L.; Torvik, P.J. Fractional calculus—A different approach to the analysis of viscoelastically damped structures. AIAA J. 1983, 21, 741–748. [Google Scholar] [CrossRef]
- Bagley, R.L.; Calico, R.A. Fractional order state equations for the control of viscoelastically damped structures. J. Guid. Control. Dyn. 1991, 14, 304–311. [Google Scholar] [CrossRef]
- Fenander, A. Modal synthesis when modeling damping by use of fractional derivatives. AIAA J. 1996, 34, 1051–1058. [Google Scholar] [CrossRef]
- Enelund, M.; Josefson, B.L. Time-domain finite element analysis of viscoelastic structures with fractional derivatives constitutive relations. AIAA J. 1997, 35, 1630–1637. [Google Scholar] [CrossRef]
- Enelund, M.; Mähler, L.; Runesson, K.; Josefson, B.L. Formulation and integration of the standard linear viscoelastic solid with fractional order rate laws. Int. J. Solids Struct. 1999, 36, 2417–2442. [Google Scholar] [CrossRef]
- Simo, J.C.; Hughes, T.J.R. Computational Inelasticity; Interdisciplinary Applied Mathematics; Springer: New York, NY, USA, 1998. [Google Scholar]
- Padovan, J. Computational algorithms for FE formulations involving fractional operators. Comput. Mech. 1987, 2, 271–287. [Google Scholar] [CrossRef]
- Adolfsson, K.; Enelund, M. Fractional derivative viscoelasticity at large deformations. Nonlinear Dyn. 2003, 33, 301–321. [Google Scholar] [CrossRef]
- Zopf, C.; Hoque, S.E.; Kaliske, M. Comparison of approaches to model viscoelasticity based on fractional time derivatives. Comput. Mater. Sci. 2015, 98, 287–296. [Google Scholar] [CrossRef]
- Zhang, W.; Capilnasiu, A.; Sommer, G.; Holzapfel, G.A.; Nordsletten, D.A. An efficient and accurate method for modeling nonlinear fractional viscoelastic biomaterials. Comput. Methods Appl. Mech. Eng. 2020, 362, 112834. [Google Scholar] [CrossRef] [Green Version]
- Birk, C.; Song, C. An improved non-classical method for the solution of fractional differential equations. Comput. Mech. 2010, 46, 721–734. [Google Scholar] [CrossRef]
- Hinze, M.; Schmidt, A.; Leine, R.I. Numerical solution of fractional-order ordinary differential equations using the reformulated infinite state representation. Fract. Calc. Appl. Anal. 2019, 22, 1321–1350. [Google Scholar] [CrossRef]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College Press: London, UK, 2010. [Google Scholar]
- Gorenflo, R.; Kilbas, A.A.; Mainardi, F.; Rogosin, S.V. Mittag-Leffler Functions, Related Topics and Applications; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Erdélyi, A. (Ed.) Higher Transcendental Functions; McGraw-Hill Book Co.: New York, NY, USA, 1953; Volume 1, pp. XXVI, 302. [Google Scholar]
- Hinze, M.; Schmidt, A.; Leine, R.I. Lyapunov stability of a fractionally damped oscillator with linear (anti-)damping. Int. J. Nonlinear Sci. Numer. Simul. 2020, 21, 425–442. [Google Scholar] [CrossRef] [Green Version]
- Hinze, M.; Schmidt, A.; Leine, R.I. The direct method of Lyapunov for nolinear dynamical systems with fractional damping. Nonlinear Dyn. 2020, 102, 2017–2037. [Google Scholar] [CrossRef]
- Gurtin, M.E. An Introduction to Continuum Mechanics; Academic Press: Boston, MA, USA, 1981. [Google Scholar]
- Christensen, R.M. Theory of Viscoelasticity, 2nd ed.; Dover Publications: Mineola, NY, USA, 2013. [Google Scholar]
- Creus, G.J. Viscoelasticity—Basic Theory and Applications to Concrete Structures; Lecture Notes in Engineering; Springer: Berlin, Germany, 1986; Volume 16. [Google Scholar]
- Lakes, R.S. Viscoelastic Solids; CRC Mechanical Engineering Series; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Gurtin, M.E.; Sternberg, E. On the linear theory of viscoelasticity. Arch. Ration. Mech. Anal. 1962, 11, 291–356. [Google Scholar] [CrossRef]
- Zener, C. Elasticity and Anelasticity of Metals; University of Chicago Press: Chicago, IL, USA, 1948. [Google Scholar]
- Gross, B. Mathematical Structure of the Theories of Viscoelasticity; Actualités scientifiques et industrielles; Hermann: Paris, France, 1953; Volume 1190. [Google Scholar]
- Doetsch, G.; Nader, W. Introduction to the Theory and Application of the Laplace Transformation; Springer: Berlin/Heidelberg, Germany, 1974. [Google Scholar]
- Marques, S.P.C.; Creus, G.J. Computational Viscoelasticity; SpringerBriefs in Computational Mechanics; Springer: Heidelberg, Germany, 2012. [Google Scholar]
- Garrappa, R. The Mittag-Leffler Function. MATLAB Central File Exchange. File ID: 48154. 2014. Available online: https://www.mathworks.com/matlabcentral/fileexchange/48154-the-mittag-leffler-function (accessed on 1 April 2020).
- Garrappa, R. Numerical evaluation of two and three parameter Mittag-Leffler functions. SIAM J. Numer. Anal. 2015, 53, 1350–1369. [Google Scholar] [CrossRef] [Green Version]
- Garrappa, R.; Popolizio, M. Computing the matrix Mittag-Leffler function with applications to fractional calculus. J. Sci. Comput. 2018, 77, 129–153. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hinze, M.; Schmidt, A.; Leine, R.I. Finite Element Formulation of Fractional Constitutive Laws Using the Reformulated Infinite State Representation. Fractal Fract. 2021, 5, 132. https://doi.org/10.3390/fractalfract5030132
Hinze M, Schmidt A, Leine RI. Finite Element Formulation of Fractional Constitutive Laws Using the Reformulated Infinite State Representation. Fractal and Fractional. 2021; 5(3):132. https://doi.org/10.3390/fractalfract5030132
Chicago/Turabian StyleHinze, Matthias, André Schmidt, and Remco I. Leine. 2021. "Finite Element Formulation of Fractional Constitutive Laws Using the Reformulated Infinite State Representation" Fractal and Fractional 5, no. 3: 132. https://doi.org/10.3390/fractalfract5030132
APA StyleHinze, M., Schmidt, A., & Leine, R. I. (2021). Finite Element Formulation of Fractional Constitutive Laws Using the Reformulated Infinite State Representation. Fractal and Fractional, 5(3), 132. https://doi.org/10.3390/fractalfract5030132