The orbit of
is defined as
. A point
is a fixed point of
R if
, and it is called strange fixed point when it is not a root of
. The stability of the fixed points is characterized by Robinson [
20]. He states the character of a k-periodic point
depending on the eigenvalues of
,
. It is repelling if all
,
, unstable or saddle if at least one
exists such that
and attracting if all
,
. In addition, a fixed point is called hyperbolic if
satisfies
, for all
j.
Proof. In order to calculate the fixed points of
, we solve
,
for
. Then,
are components of the fixed points and also are (
,
), being
.
Depending on
, at most two roots of
are real. The, the eigenvalues of
can be expressed as
for
. By evaluating these eigenvalues in each fixed point, its stability is deduced. Then, it is clear that the roots of
are superattracting, as all the eigenvalues are null at these fixed points. Moreover, when we analyze the absolute value of the eigenvalue
evaluated in a strange fixed point whose
jth component coincides with
or
, we find out that they are greater than one when
or
.
Therefore, combinations among
give rise to strange fixed points, that are repelling. Moreover, all points whose components are
combined with
, are saddle (see
Figure 1). Let us remark that all the strange fixed points hold the same behavior in each interval, so we have plotted only the performance of
. □
Now, we need to study if it is possible the existence of attracting orbits or strange attractors. This is made by analyzing the asymptotic behavior of the free critical points, when they exist.
Bifurcation Diagrams and Critical Points
Firstly, we analyze the critical points of . A critical point is a values of z that makes zero all the eigenvalues of . When it is not also a solution of , then it is named free critical point.
Theorem 3. Let, , be the roots of polynomialthat can be real, for some values of γ, being different from zero. Then, the components of the free critical points of, are eitheror(but not all),. Specifically,
- (a)
If, or, then there not exist free critical points. That is, the only critical points are those corresponding to the roots of the polynomial system.
- (b)
Ifor, then there arefree critical points.
Proof. The proof is straightforward as critical points are, by definition, those satisfying
□
Let us remark that there are wide sets of values of
where there is no free critical point. The relevance of this information yields in (see [
21]) the existence of a critical point in the basin of attraction of each attracting point. So, the absence of free critical points proofs that the only possible behavior is convergence to the roots. We plot the dynamical planes of
for different values of
where this situation happens, see
Figure 2.
Plots appearing in
Figure 2 have been obtained by using the programs appearing in [
22] as follows: a maximum number of 80 iterations, a mesh of
points and the vicinity of the roots is used as an stopping criterium with tolerance of
. We have painted each point with a color depending on the root it tends to. The color is darker when the amount of iterations needed is higher; finally, it is black when it reaches 80 iterations without satisfying the stopping criterium.
In
Figure 2a,b we see only one connected component for each basin of attraction without divergent behavior; they correspond to
, being
a bifurcation value, where the performance of the rational function changes. They have the same stable behavior as Newton’s scheme, doubling its order of convergence (see [
16]). On the contrary,
Figure 2c,d correspond to values of
in
and
, respectively; let us notice that the basins of the roots have not a finite amount of connected components.
On the other hand, the orbits of critical points give us qualitative information about the iterative method involved. In
Figure 3 we present two real parametric lines constructed from these orbits (see Theorem 3) for
. We use a free critical point
as seed, where
or
and a mesh of
points is made. For better visualization, we also fatten the interval where
is defined. Finally, each value of
is colored following this pattern: red if
converges to one of the roots of the system, blue if
diverges and black otherwise. Moreover, 200 is the maximum number of iterations considered and the tolerance in the convergence to the roots is
.
In each interval, all the free critical points have the same performance, so we present only
in
Figure 3 (for the bidimensional case). The parameter line is plotted for
and
as outside these intervals the free critical points have complex components. Let us remark that there is convergence to the roots elsewhere, except a black small region around
and a narrower one around
.
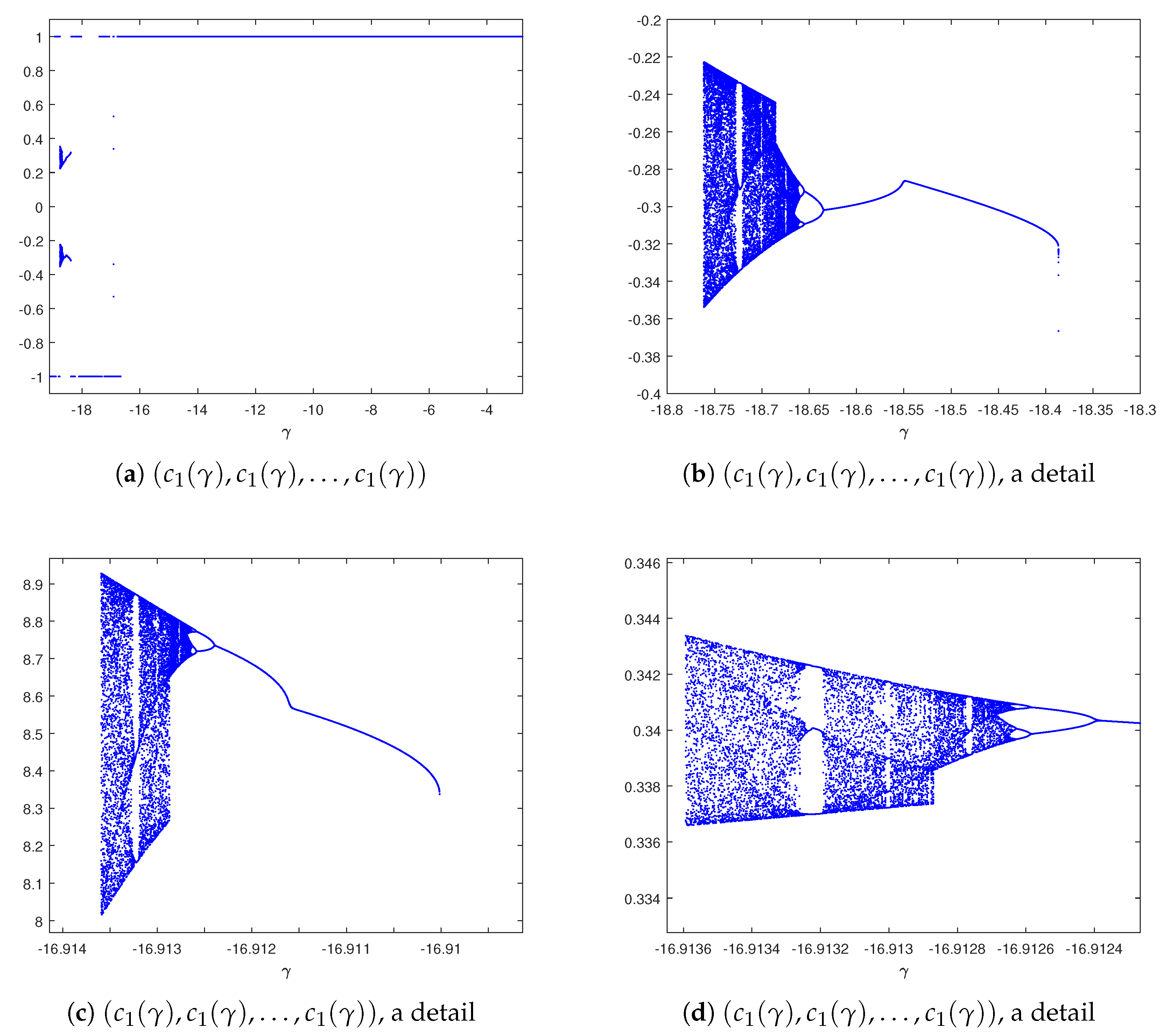
At this stage, bifurcation diagrams are employed to analyze the changes of performance for different ranges of . When acts on a critical point, different performances are found after 500 iterations of the method, for each divided in a mesh of 3000 points. It results in convergence to periodic orbits or to chaotic attractors.
In
Figure 4 we see the bifurcation diagrams corresponding to the black region of the parameter line if
(
Figure 3a). In
Figure 4a, convergence to one root is seen, but also some period-doubling cascades appear in a small interval around
, including chaotic behavior (blue regions). There, strange attractors can be found.
To represent these strange attractors, we plot in the
-space the orbit of
by
, for several close values of
laying in the blue area of
Figure 4b. For each
, 2500 different starting guesses have been used and, their first 400 iterates are not plotted, the following 500 appear in blue color and the last ones are magenta. In
Figure 5 it is observed as a parabolic strange fixed point, that bifurcates into periodic orbits of doubling periods, becomes chaotic while its orbits are dense in small regions of
-space.
This can be checked in the associated dynamical planes. Unstable performance is limited to values of
in the black regions of
Figure 3. In
Figure 6b an strange attractor is found for
, that was plotted in
Figure 5b,c. Finally, in
Figure 6c,d, the phase space for
and
respectively are represented. In them, 4-period orbits appear in yellow (the elements of the orbit are linked by yellow lines). In all cases, there exist more attracting orbits with symmetric coordinates.
We conclude that members of PM4 class are very stable. There not exist attractive strange fixed points and only in very narrow intervals of there exists unstable performance.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}