Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The use of fractional differentiation in the pseudo-state space description is not mandatory and only fractional integration is needed [16];
- Exact observability cannot be reached as all the system past must be known to predict its future [18];
- In modeling, several mathematical and interpretation problems can invalidate the models obtained [21].
2. A Class of Time Delay Systems That Exhibits a Power Law Long Memory Behavior
- Parameter affects the order of the power law behaviors;
- Parameter chosen such that controls the frequency band on which the power law behavior exists.
3. Power Law Long Memory Behavior Without Singular Kernel
4. Application
- -
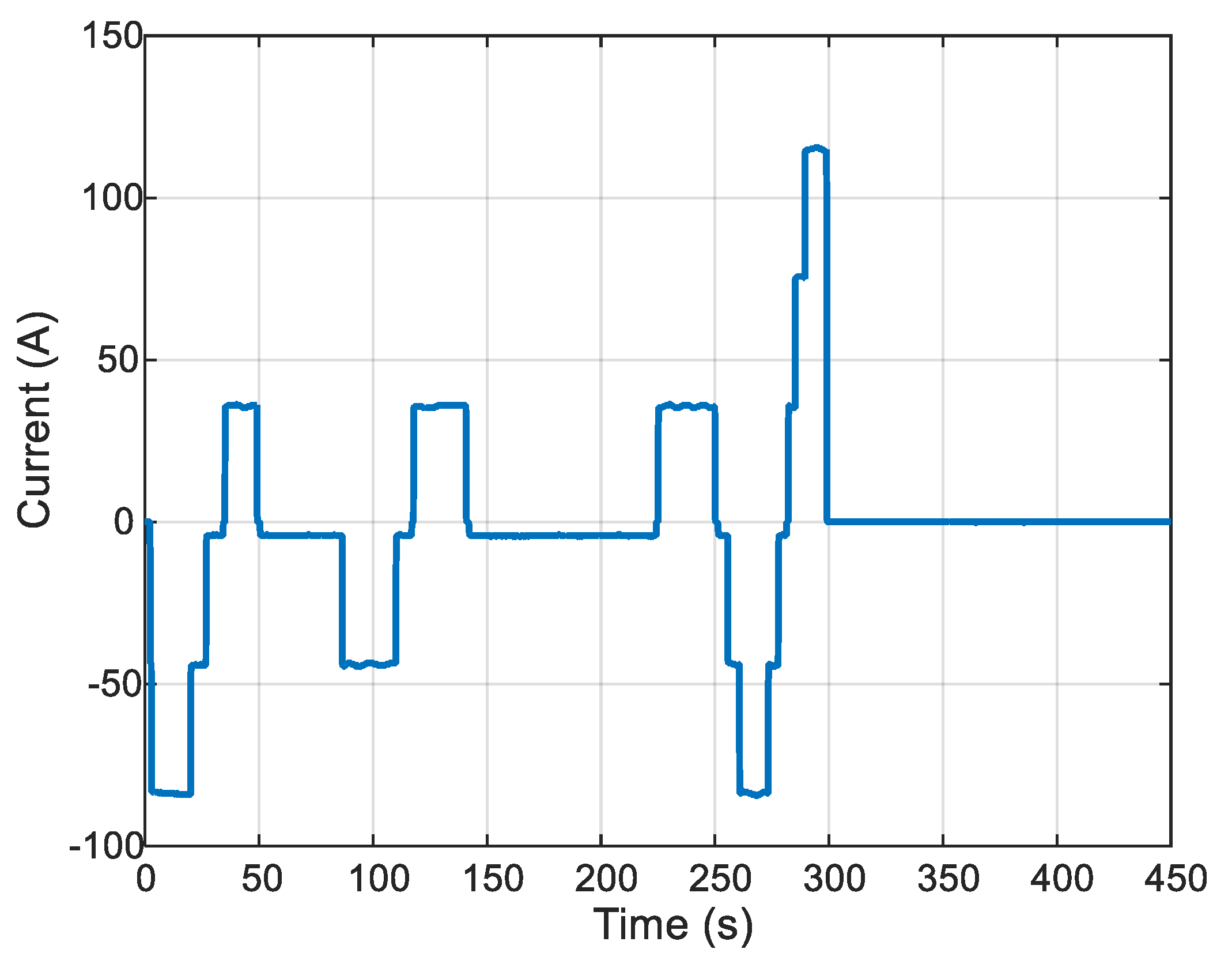
- A system Sd models the diffusion of lithium in the spherical particle and links the current to the concentration of lithium at the surface of the spherical particle;
- -
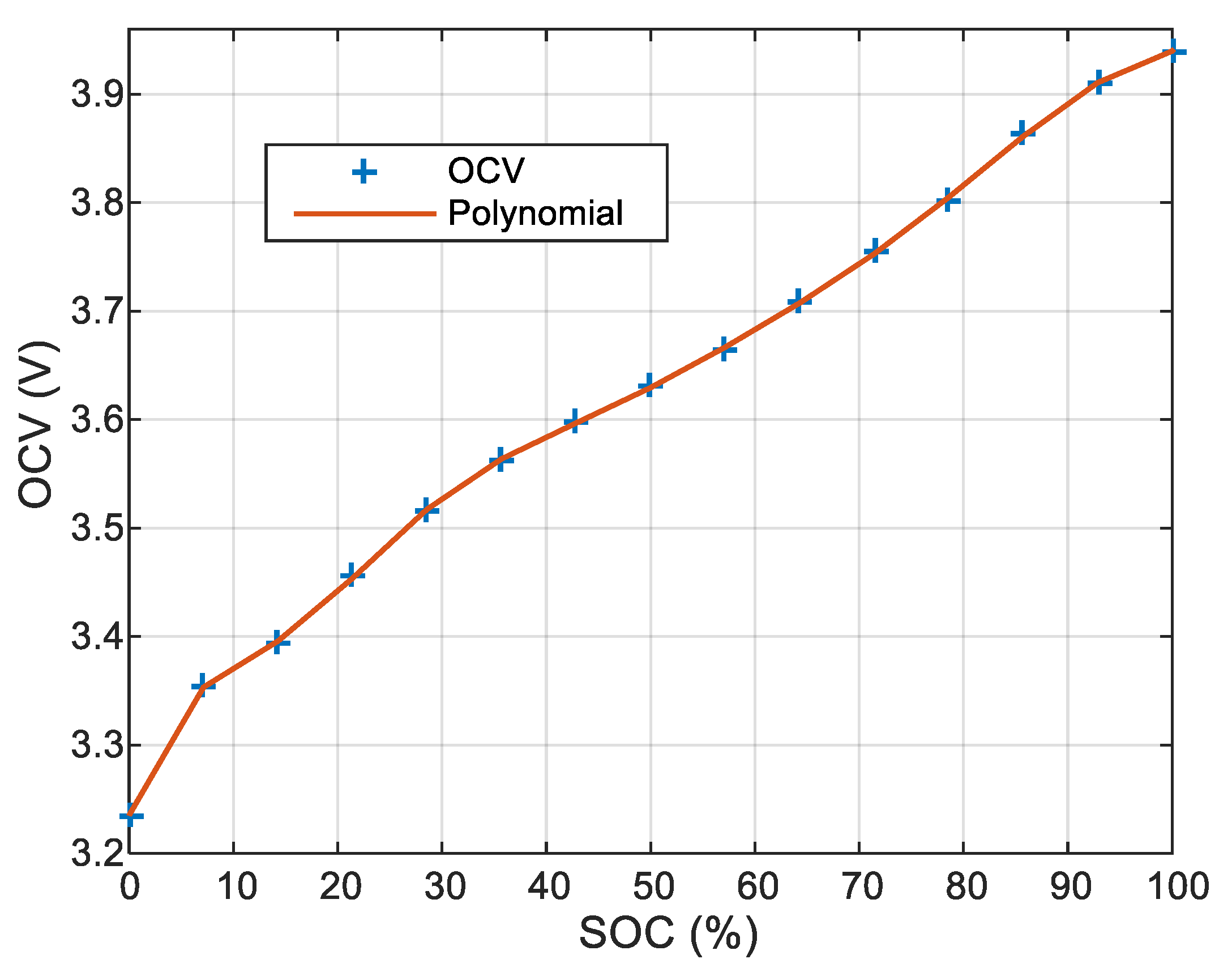
- A nonlinear function links the concentration of lithium at the surface of the spherical particle to the open circuit voltage ;
- -
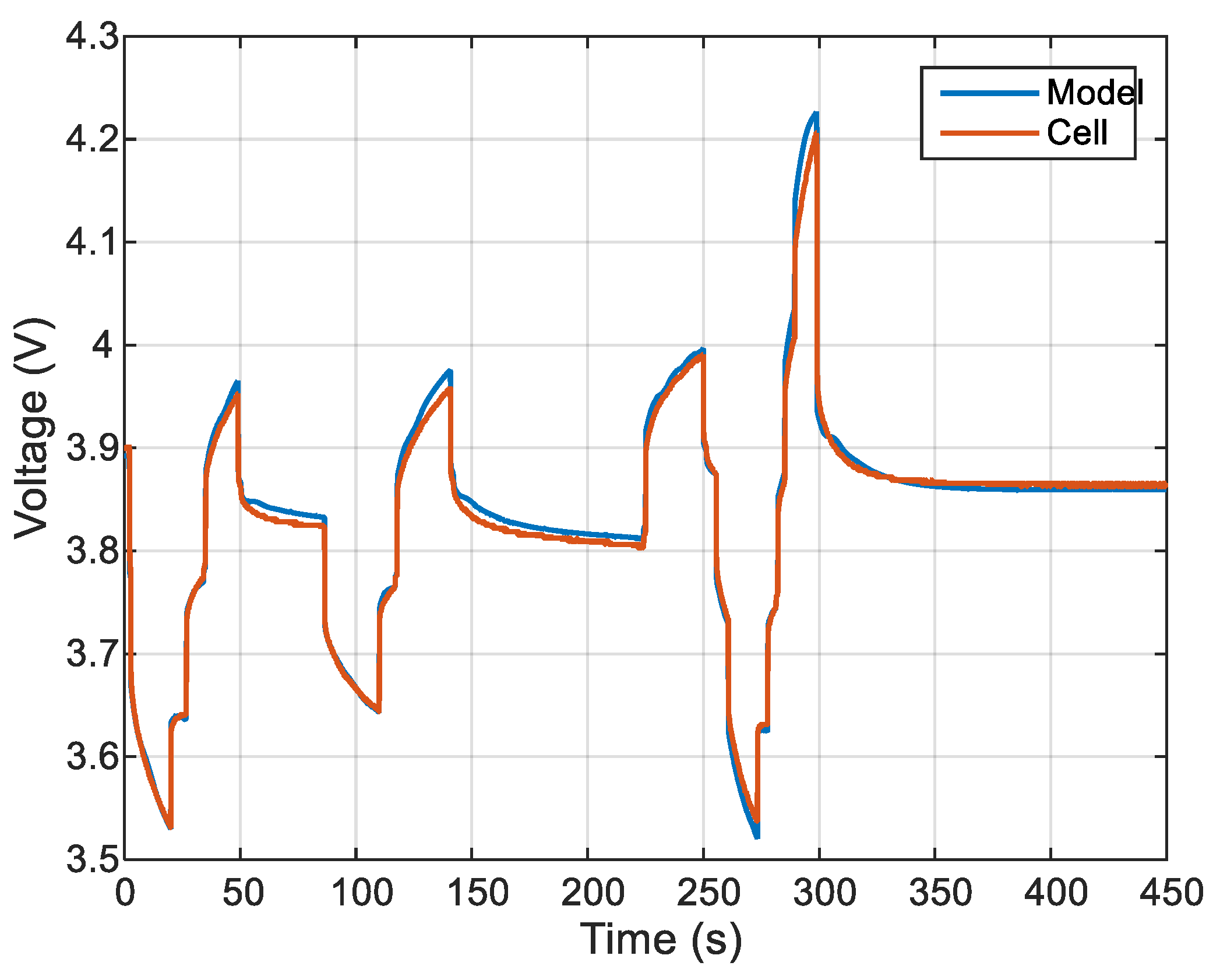
- A resistor R is used to model the cell internal resistance and contact resistance.
5. What Does the Proposed Approach Solve?
- In Equation (3), the variable can be viewed as a real state and a physical meaning can be associated to it;
- There is no longer any ambiguity in the operator used for the definition of Equation (3) (in Equation (2), the Caputo, Riemann–Liouville, or other operators [12] can be chosen);
- The memory of Model (3) is of finite length;
- Initialization the Model (3) requires the knowledge of its state on a finite length and is well defined.
6. Conclusions
Conflicts of Interest
Appendix A
References
- Rodrigues, S.; Munichandraiah, N.; Shukla, A.K. A review of state-of-charge indication of batteries by means of a.c. impedance measurements. J. Power Sources 2000, 87, 12–20. [Google Scholar] [CrossRef]
- Sabatier, J.; Aoun, M.; Oustaloup, A.; Gregoire, G.; Ragot, F.; Roy, P. Fractional system identification for lead acid battery state charge estimation. Signal Process. 2006, 86, 2645–2657. [Google Scholar] [CrossRef]
- Cugnet, M.; Laruelle, S.; Grugeon, S.; Sahut, B.; Sabatier, J.; Tarascon, J.M.; Oustaloup, A. A mathematical model for the simulation of new and aged automotive lead-acid batteries. J. Electrochem. Soc. 2009, 156, A974–A985. [Google Scholar] [CrossRef]
- Sabatier, J.; Merveillaut, M.; Francisco, J.M.; Guillemard, F.; Porcelatto, D. Lithium-ion batteries modeling involving fractional differentiation. J. Power Sources 2014, 262, 36–43. [Google Scholar] [CrossRef]
- Battaglia, J.L.; Cois, O.; Puigsegur, L.; Oustaloup, A. Solving an inverse heat conduction problem using a noninteger identified model. Int. J. Heat Mass Transf. 2001, 44, 2671–2680. [Google Scholar] [CrossRef]
- Malti, R.; Sabatier, J.; Akçay, H. Thermal modeling and identification of an aluminum rod using fractional calculus. IFAC Proc. 2009, 15, 958–963. [Google Scholar] [CrossRef]
- Magin, R.L. Fractional Calculus in Bioengineering; Begell House Publishers Inc.: Danbury, CT, USA, 2006. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College Press: London, UK, 2010. [Google Scholar]
- Matignon, D.; d’Andrea-Novel, B.; Depalle, P.; Oustaloup, A. Viscothermal losses in wind instruments: A non-integer model. In Systems and Networks: Mathematical Theory and Applications; Akademie Verlag: Regensburg, Germany, 1994. [Google Scholar]
- Enacheanu, O. Modélisation Fractale des Réseaux Électriques. Ph.D. Thesis, Université Joseph Fourier—Grenoble I, Grenoble, France, October 2008. Available online: http://www.theses.fr/2008GRE10159 (accessed on 20 November 2019).
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: Philadelphia, PA, USA, 1993. [Google Scholar]
- De Oliveira, E.C.; Tenreiro Machado, J.A. A Review of Definitions for Fractional Derivatives and Integral. Math. Probl. Eng. 2014, 2014, 6. [Google Scholar] [CrossRef]
- Sabatier, J.; Merveillaut, M.; Malti, R.; Oustaloup, A. On a Representation of Fractional Order Systems: Interests for the Initial Condition Problem. In Proceedings of the 3rd IFAC Workshop on “Fractional Differentiation and its Applications” (FDA’08), Ankara, Turkey, 5–7 November 2008. [Google Scholar]
- Sabatier, J.; Merveillaut, M.; Malti, R.; Oustaloup, A. How to Impose Physically Coherent Initial Conditions to a Fractional System? Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1318–1326. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Coito, F.J. Initial conditions: What are we talking about? In Proceedings of the Third IFAC Workshop on Fractional Differentiation, Ankara, Turkey, 5–7 November 2008. [Google Scholar]
- Sabatier, J.; Farges, C.; Trigeassou, J.C. Fractional systems state space description: Some wrong ideas and proposed solutions. J. Vib. Control 2014, 20, 1076–1084. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C. Comments on the description and initialization of fractional partial differential equations using Riemann-Liouville’s and Caputo’s definitions. J. Comput. Appl. Math. 2018, 339, 30–39. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Merveillaut, M.; Feneteau, L. On observability and pseudo state estimation of fractional order systems. Eur. J. Control 2012, 3, 1–12. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. arXiv 2016, arXiv:1602.03408. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A New Definition of Fractional Derivative without Singular Kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Dokumetzzidis, A.R. Magin, A commentary on fractionalization of multi-compartmental models. J. Pharm. Pharm. 2010, 37, 203–207. [Google Scholar]
- Delfour, M.C.; Mitter, S.K. Controllability, observability and optimal feedback of affine hereditary systems. SIAM J. Control 1972, 10, 298–328. [Google Scholar]
- Sabatier, J.; Rodriguez Cadavid, S.; Farges, C. Advantages of limited frequency band fractional integration operator in fractional models definition. In Proceedings of the Conference on Control, Decision and Information Technologies, CoDIT 2019, Paris, France, 23–26 April 2019. [Google Scholar]
- Allagui, A.; Zhang, D.; Elwakil, A.S. Short-term memory in electric double-layer capacitors. Appl. Phys. Lett. 2018, 113, 253901. [Google Scholar] [CrossRef]
- Sabatier, J.; Francisco, J.; Guillemard, F.; Lavigne, L.; Moze, M.; Merveillaut, M. Lithium-ion batteries modelling: A simple fractional differentiation based model and its associated parameters estimation method. Signal Process. 2015, 107, 290–301. [Google Scholar] [CrossRef]
- Fridman, E. Introduction to Time-Delay Systems: Analysis and Control; Birkhauser Verlag: Basel, Switzerland, 2014. [Google Scholar]
- Driver, R.D. Existence and stability of solutions of a delay-differential system. Arch. Ration. Mech. Anal. 1962, 10, 401–426. [Google Scholar] [CrossRef]
- Grossman, S.I.; Miller, R.K. Perturbation theory for Volterra integrodifferential systems. J. Differ. Equ. 1970, 8, 457–474. [Google Scholar] [CrossRef]
- Burton, T.A. Stability theory for Volterra equations. J. Differ. Equ. 1979, 32, 101–118. [Google Scholar] [CrossRef][Green Version]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; Dover Publications Inc.: Mineola, NY, USA, 1965. [Google Scholar]










© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabatier, J. Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems. Fractal Fract. 2020, 4, 1. https://doi.org/10.3390/fractalfract4010001
Sabatier J. Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems. Fractal and Fractional. 2020; 4(1):1. https://doi.org/10.3390/fractalfract4010001
Chicago/Turabian StyleSabatier, Jocelyn. 2020. "Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems" Fractal and Fractional 4, no. 1: 1. https://doi.org/10.3390/fractalfract4010001
APA StyleSabatier, J. (2020). Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems. Fractal and Fractional, 4(1), 1. https://doi.org/10.3390/fractalfract4010001