1. Introduction
Non-linear and fractal physical phenomena are abundant in nature [
1,
2]. Examples of non-linear phenomena can be given by the continuous time random walks resulting in fractional diffusion equations [
3], fractional conservation of mass [
4] or non-linear viscoelasticity [
5,
6]. Such models exhibit global dependence through the action of the nonlinear convolution operator (i.e., differ-integral). Since this setting opposes the principle of locality there can be problems with the interpretation of the obtained results. In most circumstances such models can be treated as asymptotic as it has been demonstrated for the time-fractional continuous time random walk [
7]. The asymptotic character of these models leads to the realization that they describe
mesoscopic behavior of the concerned systems. The action of fractional differ-integrals on analytic functions results in Hölder functions representable by fractional power series (see for example [
8]).
Fractals are becoming essential components in the modeling and simulation of natural phenomena encompassing many temporal or spatial scales [
9]. The irregularity and self-similarity under scale changes are the main attributes of the morphologic complexity of cells and tissues [
10]. Fractal shapes are frequently built by iteration of function systems via recursion [
11,
12]. In a large number of cases, these systems leads to nowhere differentiable fractals of infinite length, which may be unrealistic. On the other hand fractal shapes observable in natural systems typically span only several recursion levels. This fact draws attention to one particular class of functions, called
singular, which are differentiable but for which at most points the derivative vanishes. There are fewer tools for the study of singular functions since one of the difficulties is that for them the Fundamental Theorem of calculus fails and hence they cannot be represented by a non-trivial differential equation.
Singular signals can be considered as toy-models for strongly-non linear phenomena, such as turbulence or asset price dynamics. In the beginning of 1970s, Mandelbrot proposed a model of random energy dissipation in intermittent turbulence [
13], which served as one of the early examples of multifractal formalism. This model, known as canonical Mandelbrot cascades, is related to the Richardson’s model of turbulence as noted in [
14,
15]. Mandelbrot’s cascade model and its variations try to mimic the way in which energy is dissipated, i.e., the splitting of eddies and the transfer of energy from large to small scales. There is an interesting link between multifractals and Brownian motion [
16]. One of the examples in the present paper can be related to the Mandelbrot model and the associated binomial measure.
Mathematical descriptions of strongly non-linear phenomena necessitate relaxation of the assumption of differentiability [
17]. While this can be achieved also by fractional differ-integrals, or by multi-scale approaches [
18], the present work focuses on local descriptions in terms of limits of difference quotients [
19] and non-linear scale-space transformations [
20]. The reason for this choice is that locality provides a direct way of physical interpretation of the obtained results. In the old literature, difference quotients of functions of fractional order have been considered at first by du Bois-Reymond [
21] and Faber [
22] in their studies of the point-wise differentiability of functions. While these initial developments followed from purely mathematical interest, later works were inspired from physical research questions. Cherbit [
19] and later on Ben Adda and Cresson [
23] introduced the notion of fractional velocity as the limit of the fractional difference quotient. Their main application was the study of fractal phenomena and physical processes for which the instantaneous velocity was not well defined [
19].
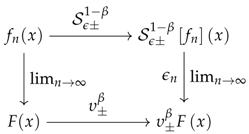
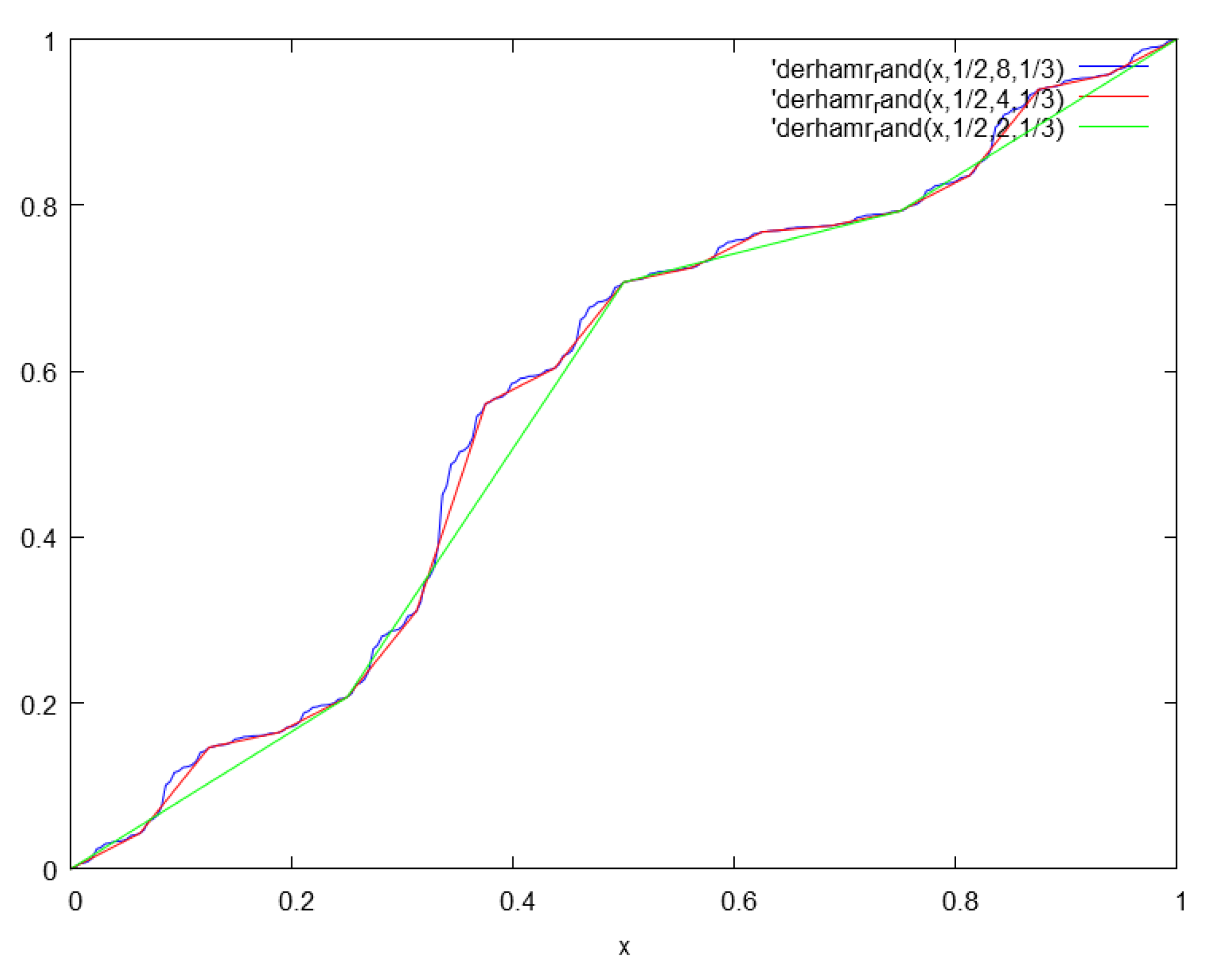
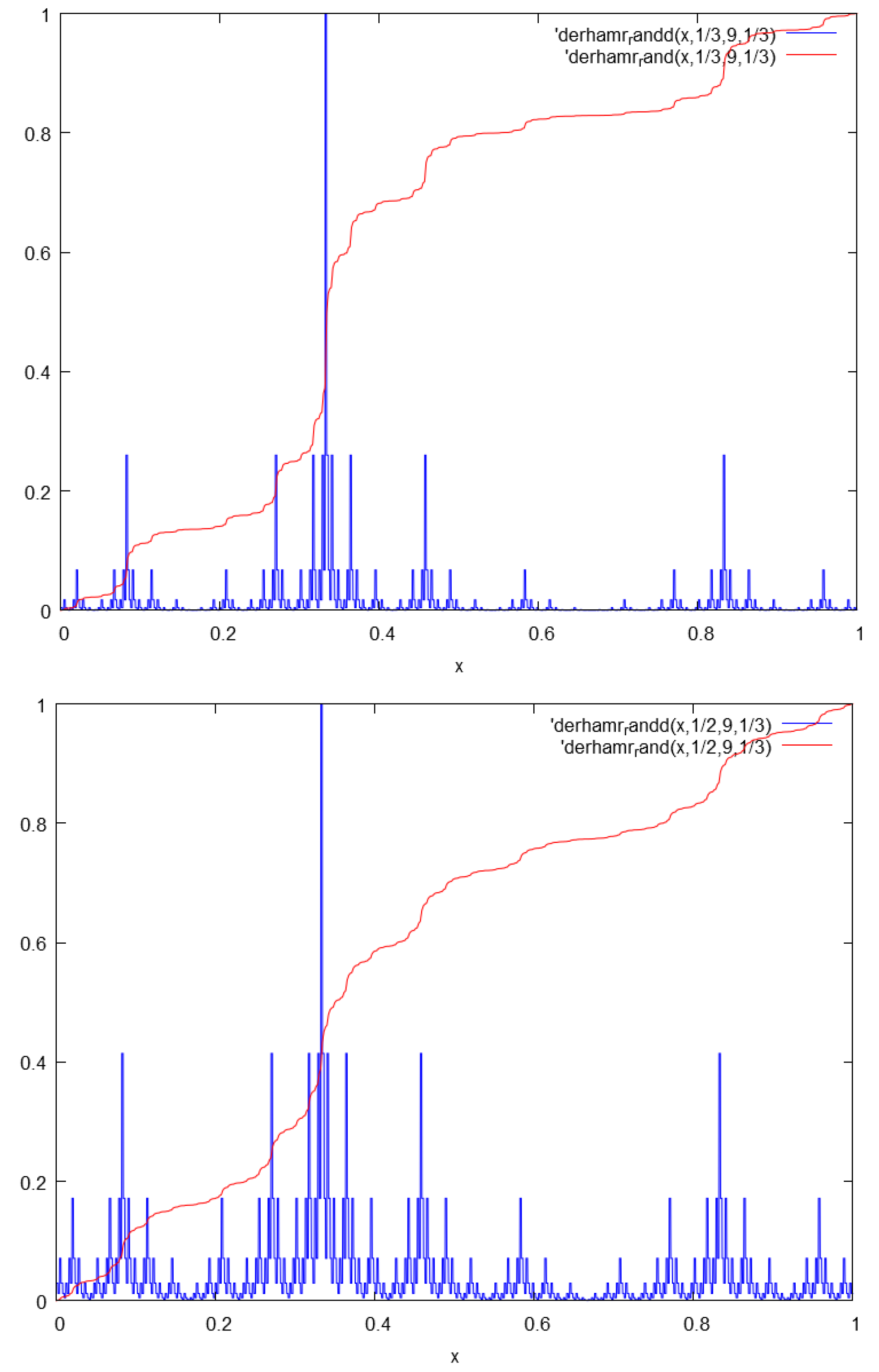
This work will further demonstrate applications to singular functions. Examples are given by the De Rham and Neidinger’s functions, represented by iterative function systems (IFS). The relationship with the Mandelbrot cascade and the associated Bernoulli-Mandelbrot binomial measure is also put into evidence. In addition, the form of the Langevin equation is examined for the requirements of path continuity. Finally, the relationship between fractional velocities and the localized versions of fractional derivatives in the sense of Kolwankar-Gangal will be demonstrated.
2. Fractional Variations and Fractional Velocities
The general definitions and notations are given in
Appendix A. This section introduces the concept of fractional variation and fractional velocities.
Definition 1. Define forward (backward) Fractional Variation operators of order asfor a positive ϵ. Definition 2 (Fractional order velocity)
. Define the fractional velocity of fractional order β as the limitA function for which at least one of exists finitely will be called β-differentiable at the point x.
The terms
-velocity and fractional velocity will be used interchangeably throughout the paper. In the above definition we do not require upfront equality of left and right
-velocities. This amounts to not demanding continuity of the
-velocities in advance. Instead, continuity is a property, which is fulfilled under certain conditions. It was further established that for fractional orders fractional velocity is continuous only if it is zero [
24].
Further, the following technical conditions are important for applications.
Condition 1 (Hölder growth condition)
. For given x and for some and . Condition 2 (Hölder oscillation condition)
. For given x, and The conditions for the existence of the fractional velocity were demonstrated in [
24]. The main result is repeated here for convenience.
Theorem 1 (Conditions for existence of
β-velocity)
. For each if exists (finitely), then f is right-Hölder continuous of order β at x and C1 holds, and the analogous result holds for and left-Hölder continuity.Conversely, if C2 holds then exists finitely. Moreover, C2 implies C1. The proof is given in [
24]. The essential algebraic properties of the fractional velocity are given in
Appendix B. Fractional velocities provide a local way of approximating the growth of Hölder functions in the following way.
Proposition 1 (Fractional Taylor-Lagrange property)
. The existence of for implies thatWhile ifuniformly in the interval for some Cauchy sequence and is constant in ϵ then = K. The proof is given in [
24].
Remark 1. The fractional Taylor-Lagrange property was assumed and applied to establish a fractional conservation of mass formula in ([4], Section 4) assuming the existence of a fractional Taylor expansion according to Odibat and Shawagfeh [25]. These authors derived fractional Taylor series development using repeated application of Caputo’s fractional derivative [25]. The Hölder growth property can be generalized further into the concept of F-analytic functions (see
Appendix A for definition). An F-analytic function can be characterized up to the leading fractional order in terms of its
-differentiability.
Proposition 2. Suppose that in the interval . Then exists finitely for .
Proof. The proof follows directly from Proposition 1 observing that
so that using the notation in Definition A4
☐
Remark 2. From the proof of the proposition one can also see the fundamental asymmetry between the forward and backward fractional velocities. A way to combine this is to define a complex mappingwhich is related to the approach taken by Nottale [17] by using complexified velocity operators. However, such unified treatment will not be pursued in this work. 4. Characterization of Kolwankar-Gangal Local Fractional Derivatives
The overlap of the definitions of the Cherebit’s fractional velocity and the Kolwankar-Gangal fractional derivative is not complete [
34]. Notably, Kolwankar-Gangal fractional derivatives are sensitive to the critical local Hölder exponents, while the fractional velocities are sensitive to the critical point-wise Hölder exponents and there is no complete equivalence between those quantities [
35]. In this section we will characterize the local fractional derivatives in the sense of Kolwankar and Gangal using the notion of fractional velocity.
4.1. Fractional Integrals and Derivatives
The left Riemann-Liouville differ-integral of order
is defined as
while the right integral is defined as
where
is the Euler’s Gamma function (Samko et al. [
36], p. 33). The left (resp. right) Riemann- Liouville (R-L) fractional derivatives are defined as the expressions (Samko et al. [
36], p. 35):
The left (resp. right) R-L derivative of a function
f exists for functions representable by fractional integrals of order
of some Lebesgue-integrable function. This is the spirit of the definition of Samko et al. ([
36], Definition 2.3, p. 43) for the appropriate functional spaces:
Here
denotes absolute continuity on an interval in the conventional sense. Samko et al. comment that the existence of a summable derivative
of a function
does not yet guarantee the restoration of
by the primitive in the sense of integration and go on to give references to singular functions for which the derivative vanishes almost everywhere and yet the function is not constant, such as for example, the De Rhams’s function [
37].
To ensure restoration of the primitive by fractional integration, based on Th. 2.3 Samko et al. introduce another space of summable fractional derivatives, for which the Fundamental Theorem of Fractional Calculus holds.
Definition 4. Define the functional spaces of summable fractional derivatives Samko et al. ([36], Definition 2.4, p. 44) as . In this sense
for
(Samko et al. [
36], Theorem 4, p. 44). While
for
.
So defined spaces do not coincide. The distinction can be seen from the following example:
Example 1. Definefor . Then for so that everywhere in . On the other hand,for and Therefore, the fundamental theorem fails. It is easy to demonstrate that is not on any interval involving 0.
Therefore, the there is an inclusion .
4.2. The Local(ized) Fractional Derivative
The definition of
local fractional derivative (LFD) introduced by Kolwankar and Gangal [
38] is based on the localization of Riemann-Liouville fractional derivatives towards a particular point of interest in a way similar to Caputo.
Definition 5. Define left LFD asand right LFD as Remark 4. The seminal publication defined only the left derivative. Note that the LFD is more restrictive than the R-L derivative because the latter may not have a limit as .
Ben Adda and Cresson [
23] and later Chen et al. [
26] claimed that the Kolwankar—Gangal definition of local fractional derivative is equivalent to Cherbit’s definition for certain classes of functions. On the other hand, some inaccuracies can be identified in these articles [
26,
34]. Since the results of Chen et al. [
26] and Ben Adda-Cresson [
34] are proven under different hypotheses and notations I feel that separate proofs of the equivalence results using the theory established so-far are in order.
Proposition 5 (LFD equivalence)
. Let be β-differentiable about x. Then exists and Proof. We will assume that
is non-decreasing in the interval
. Since
x will vary, for simplicity let’s assume that
. Then by Proposition 1 we have
Standard treatments of the fractional derivatives [
8] and the changes of variables
give the alternative Euler integral formulation
for
. Therefore, we can evaluate the fractional Riemann-Liouville integral as follows:
setting conveniently
. The last expression
I can be evaluated in parts as
The first expression is recognized as the Beta integral [
8]:
In order to evaluate the second expression we observe that by Proposition 1
for a positive
. Assuming without loss of generality that
is non decreasing in the interval we have
and
and the limit gives
by the
squeeze lemma and Proposition 1. Therefore,
. On the other hand, for
and
by the same reasoning
Then differentiation by
h gives
Therefore,
by monotonicity in
h. Therefore,
. Finally, for
the expression
A should be evaluated as the limit
due to divergence of the
function. The proof for the left LFD follows identical reasoning, observing the backward fractional Taylor expansion property.
Proposition 6. Suppose that exists finitely and the related R-L derivative is summable in the sense of Definition 4. Then f is β-differentiable about x and .
Proof. Suppose that
and let
. The existence of this limit implies the inequality
for
and a Cauchy sequence
.
Without loss of generality suppose that
is non-decreasing and
. We proceed by integrating the inequality:
Then by the Fundamental Theorem
and
which is Cauchy. Therefore, by Proposition 1
f is
-differentiable at
x and
. The last assertion comes from Proposition 5. The right case can be proven in a similar manner. ☐
The weaker condition of only point-wise Hölder continuity requires the additional hypothesis of summability as identified in [
34]. The following results can be stated.
Lemma 1. Suppose that exists finitely in the weak sense, i.e., implying only that . Then Condition C1 holds for f a.e. in the interval . Proof. The left R-L derivative can be evaluated as follows. Consider the fractional integral in the Liouville form
Without loss of generality assume that
f is non-decreasing in the interval
and set
and
. Then
for
. In a similar manner
Therefore, the quotient limit is bounded from both sides as
by the continuity of
f. In a similar way we establish
and
By the absolute continuity of the integral the quotient limit
exists as
for almost all
x. This also implies the existence of the other two limits. Therefore, the following bond holds
where
and
wherever these exist. Therefore, as
x approaches
a .
Finally, we establish the bounds of the limit
Therefore, Condition
C1 is necessary for the existing of the limit and hence for
. ☐
Based on this result, we can state a generic continuity result for LFD of fractional order.
Theorem 3 (Continuity of LFD). For if is continuous about x then .
Proof. We will prove the case for
. Suppose that LFD is continuous in the interval
and
. Then the conditions of Lemma 1 apply, that is
a.e. in
. Therefore, without loss of generality we can assume that
at
a. Further, we express the R-L derivative in Euler form setting
:
By the monotonicity of the power function (e.g., Hölder growth property):
where
and
. On the other hand, we can split the integrand in two expressions for an arbitrary intermediate value
. This gives
Therefore, by the Hölder growth property and monotonicity in
z
where
and
. Therefore,
However, by the assumption of continuity
as
and the non-strict inequalities become equalities so that
However, if we have contradiction since then or must hold and ceases to be arbitrary. Therefore, since is arbitrary must hold. The right case can be proven in a similar manner. ☐
Corollary 3 (Discontinuous LFD). Let . Then for is totally disconnected.
Remark 5. This result is related to Corollary 3 in [26] however here it is established in a more general way. 4.3. Equivalent Forms of LFD
LFD can be calculated in the following way. Starting from Formula (
5) for convenience we define the integral average
Then we apply L’Hôpital’s rule on the second term :
From this equation there are two conclusions that can be drawn.
First, for
by application of the definition of fractional velocity and L’Hôpital’s rule:
if the last limit exists. Therefore, LFD can be characterized in terms of fractional velocity. This can be formalized in the following proposition:
Proposition 7. Suppose that for (resp. ) for some small . If exists finitely thenwhere is given by Formula (6). From this we see that f may not be -differentiable at x. From this perspective LFD is a derived concept - it is the velocity of the integral average.
Second, for BV functions the order of integration and parametric derivation can be exchanged so that
where we demand the existence of
a.e in
, which follows from the Lebesgue differentiation theorem. This statement can be formalized as.
Proposition 8. Suppose that for some small . Then In the last two formulas we can also set by the reflection formula.
Therefore, in the conventional form for a BV function
5. Discussion
Kolwankar-Gangal local fractional derivative was introduced as tools for the study of the scaling of physical systems and systems exhibiting fractal behavior [
39]. The conditions for applicability of the K-G fractional derivative were not specified in the seminal paper, which leaves space for different interpretations and sometimes confusions. For example, recently Tarasov claimed that local fractional derivatives of fractional order vanish everywhere [
40]. In contrast, the results presented here demonstrate that local fractional derivatives vanish only if they are continuous. Moreover, they are non-zero on arbitrary dense sets of measure zero for
-differentiable functions as shown.
Another confusion is the initial claim presented in [
23] that K-G fractional derivative is equivalent to what is called here
-fractional velocity. This needed to be clarified in [
26] and restricted to the more limited functional space of summable fractional Riemann-Liouville derivatives [
34].
Presented results call for a careful inspection of the claims branded under the name of “local fractional calculus” using K-G fractional derivative. Specifically, in the implied conditions on image function’s regularity and arguments of continuity of resulting
local fractional derivative must be examined in all cases. For example, in another stream of literature fractional difference quotients are defined on fractal sets, such as the Cantor’s set [
41]. This is not to be confused with the original approach of Cherebit, Kolwankar and Gangal where the topology is of the real line and the set
is totally disconnected.


{kind=link}
{kind=link}