
Iris Liveness Detection Using Multiple Deep Convolution Networks



Abstract
:1. Introduction
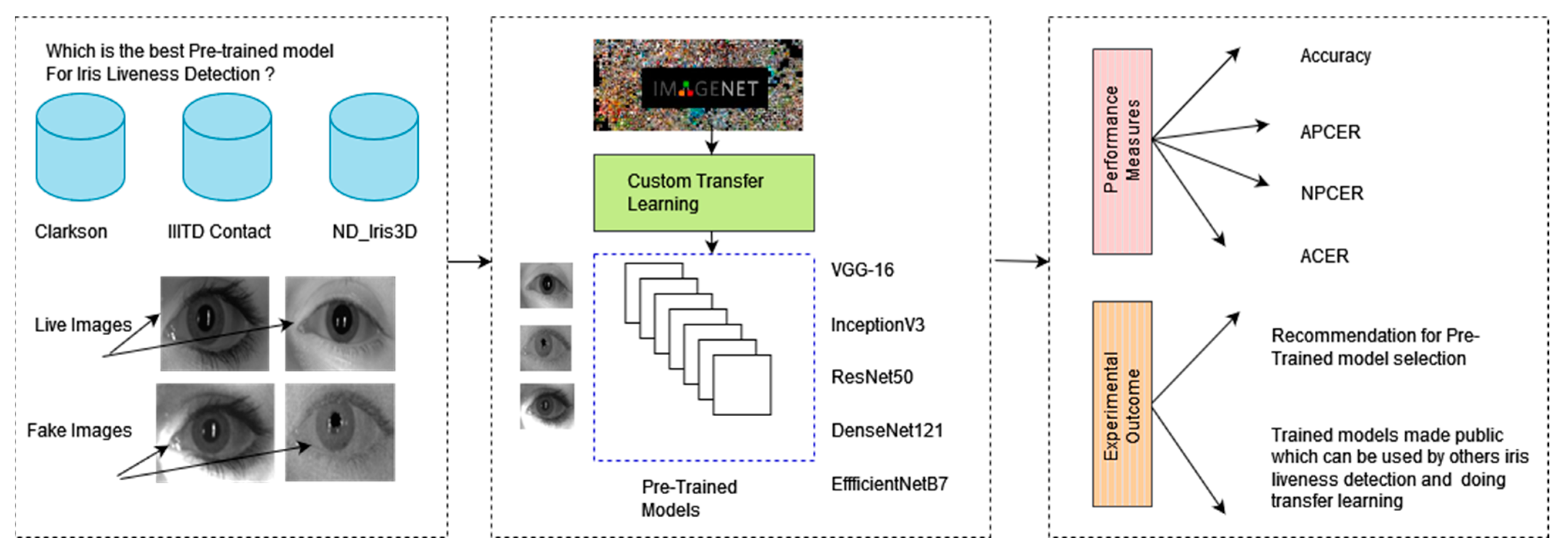
- To identify iris liveness through five pre-trained networks, namely, VGG-16, Inceptionv3, Resnet50, Densenet121, and EfficientNetB7;
- To conduct a performance comparison across all five models to decide which pre-trained model is better for Iris-PAD;
- To fine-tune all these models to achieve better performance.
2. Related Work
3. Proposed Iris Liveness Detection
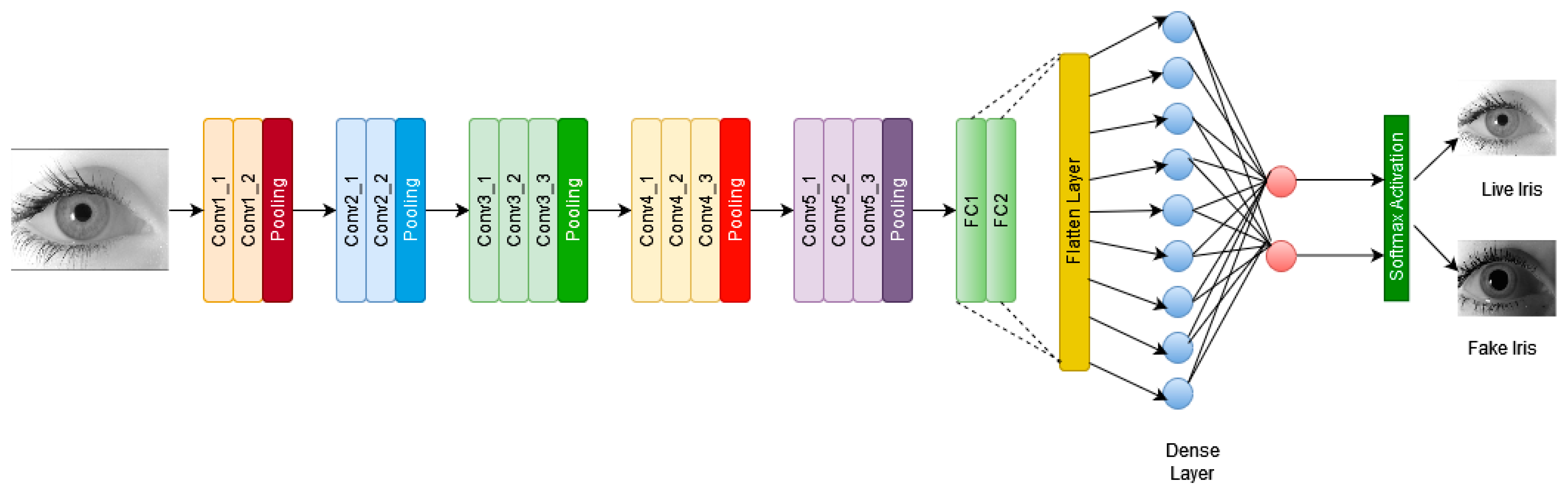
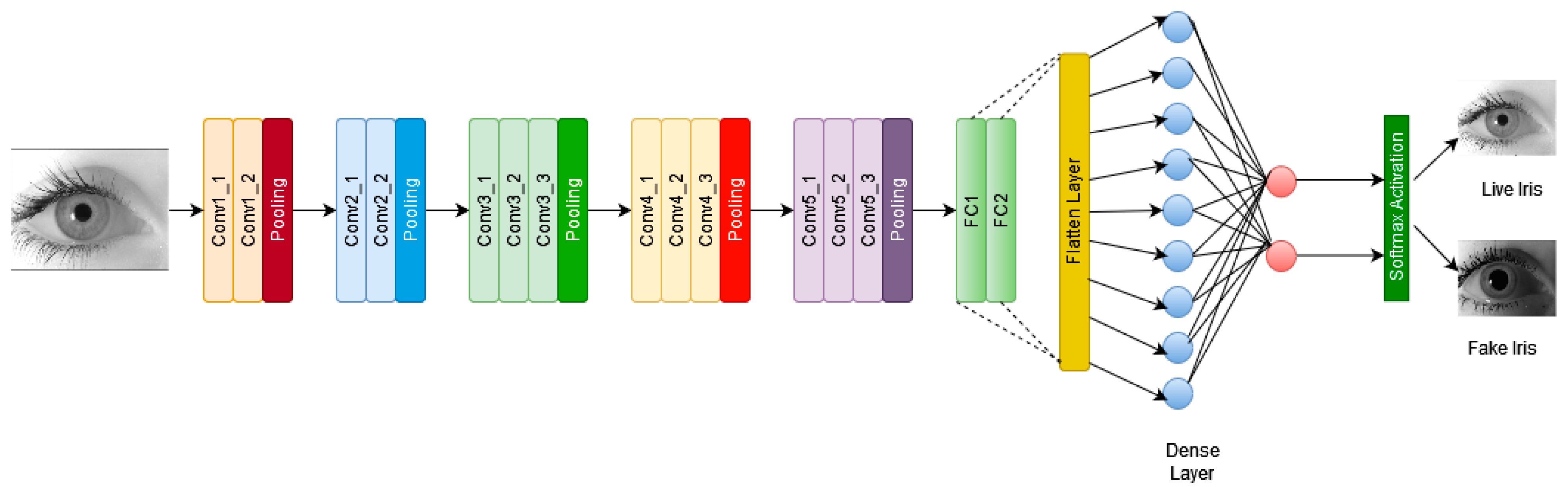
3.1. VGG-16
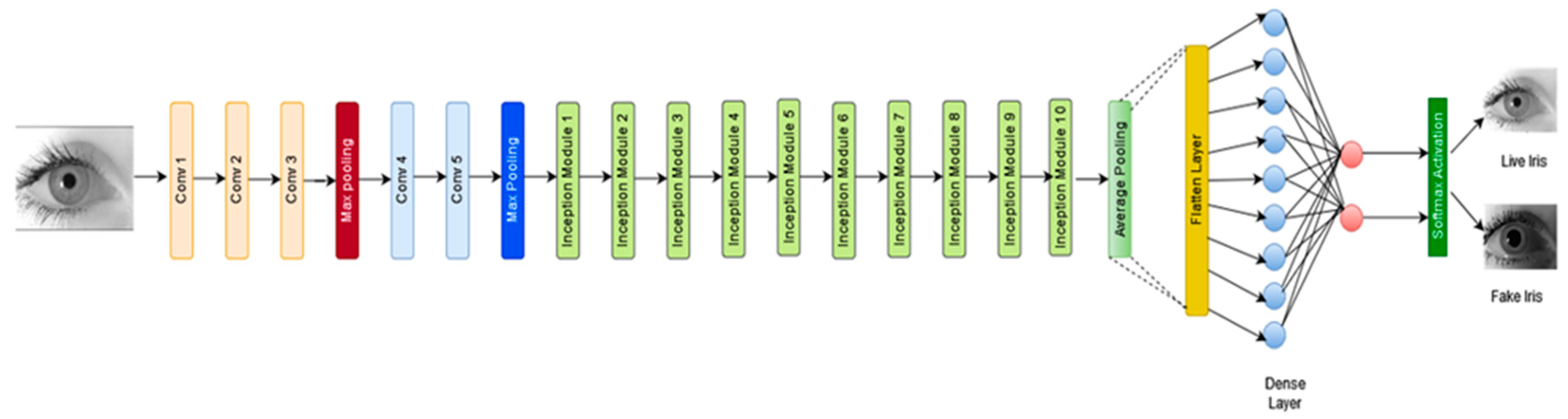
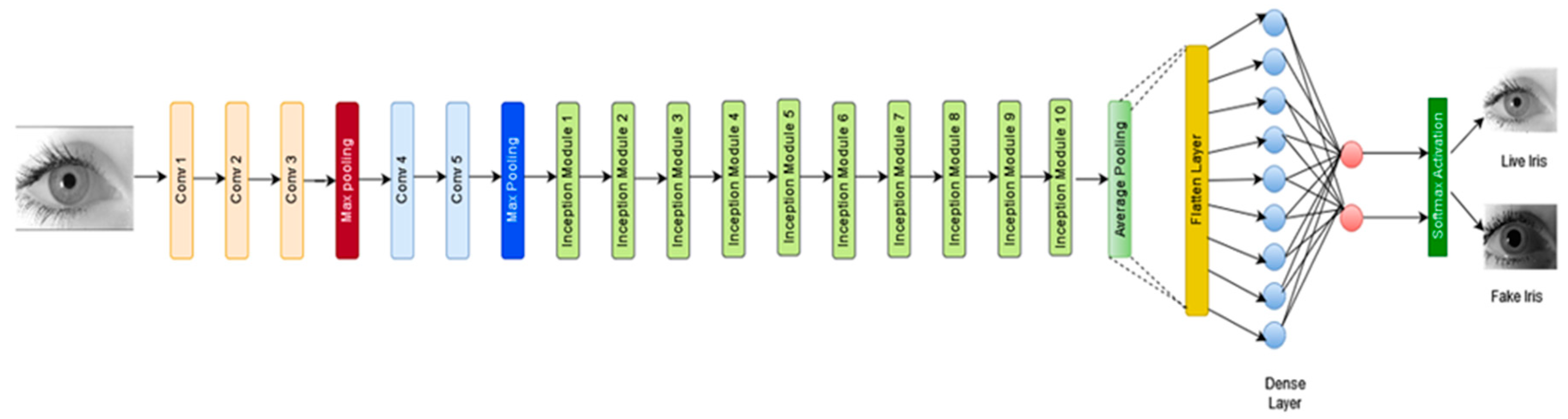
3.2. InceptionV3
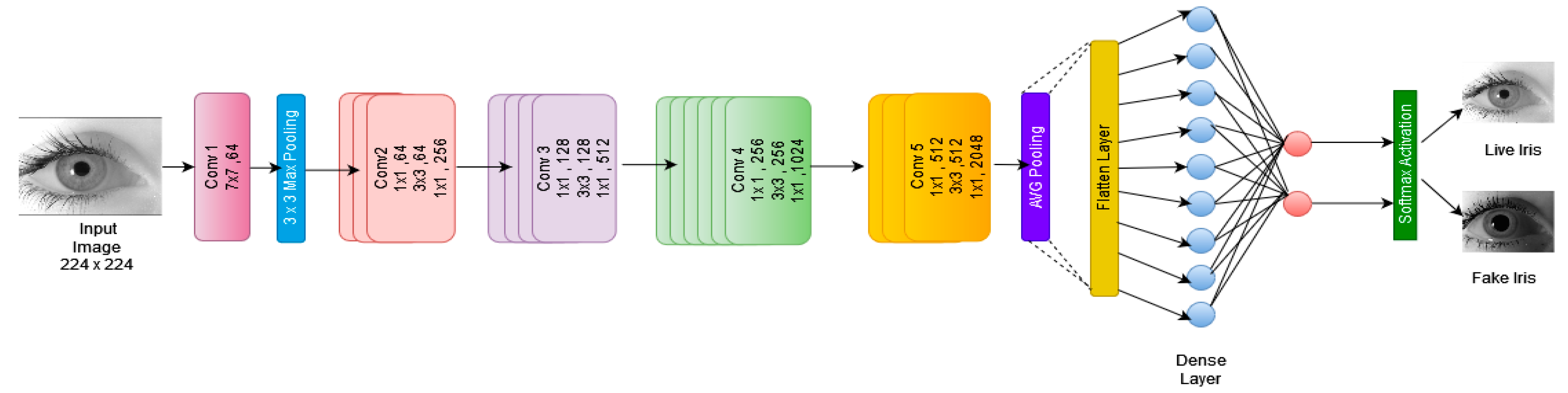
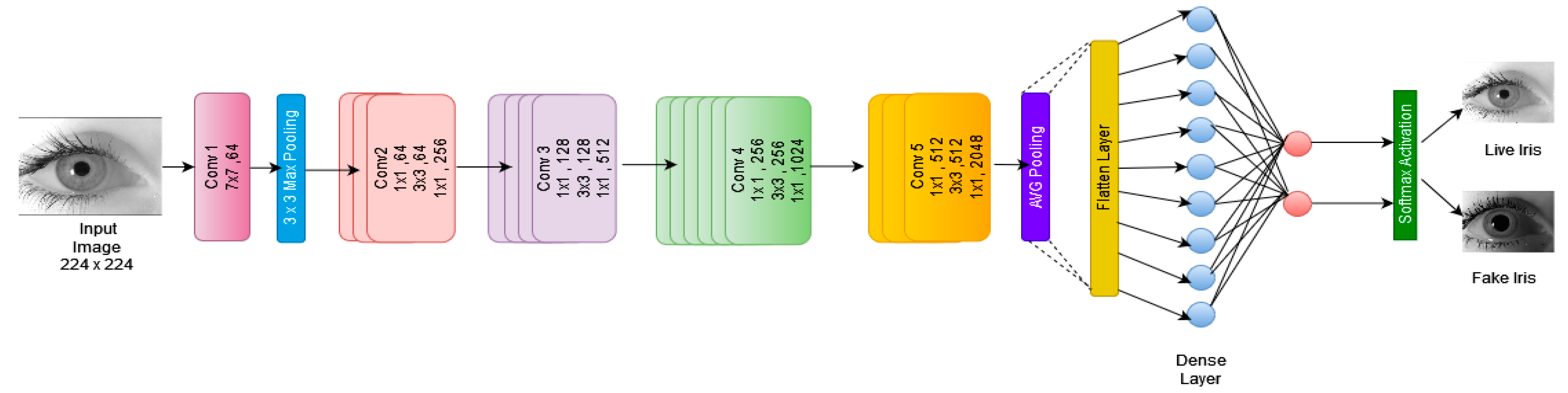
3.3. ResNet 50
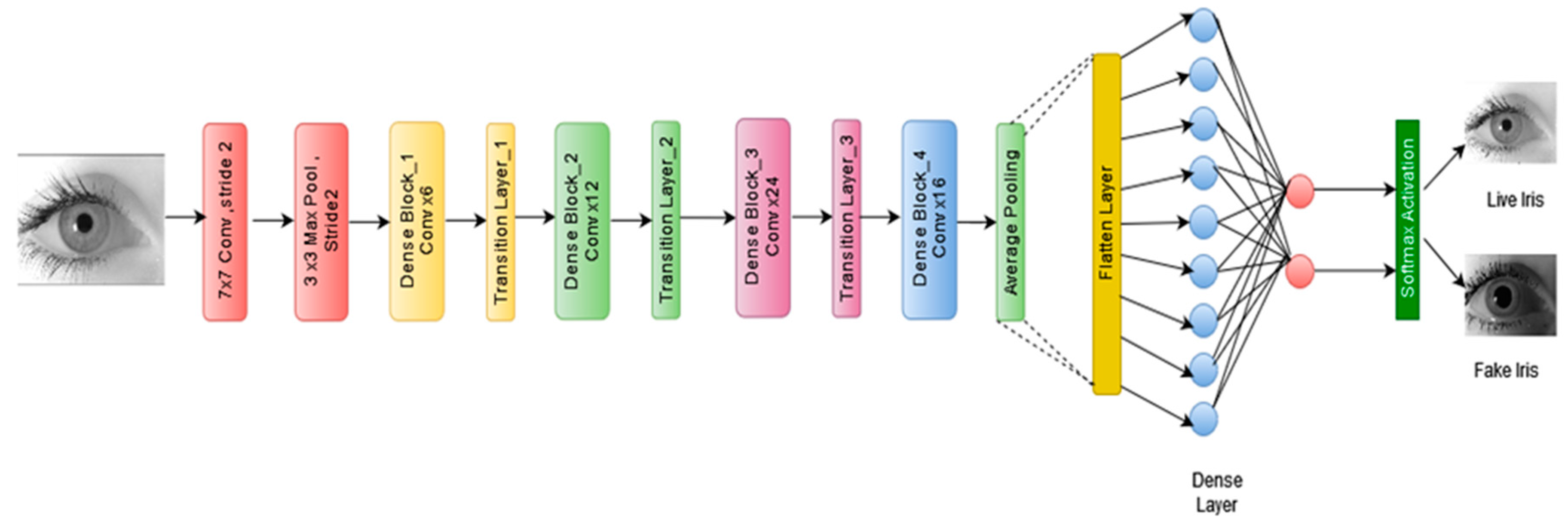
3.4. DenseNet121
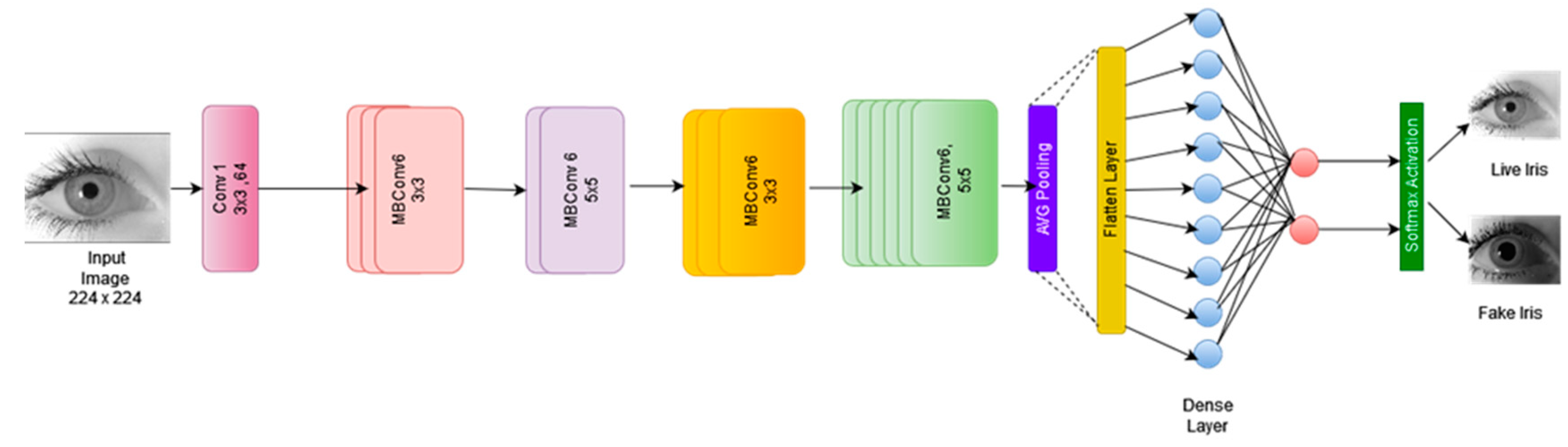
3.5. EfficientNetB7
4. Experimental Set-Up
4.1. Description of the Dataset
4.1.1. LivDet-Iris 2015: Clarkson Dataset
4.1.2. IIITD Contact Lens Iris (CLI Dataset)
4.1.3. ND_Iris3D_2020
4.2. Model Training
4.3. Performance Measures
5. Results
5.1. VGG-16
5.2. InceptionV3
5.3. ResNet50
5.4. DenseNet121
5.5. EfficientNetB7
6. Discussions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tapia, J.; Gonzalez, S.; Busch, C. Iris Liveness Detection using a Cascade of Dedicated Deep Learning Networks. IEEE Trans. Inf. Forensics Secur. 2021, 17, 42–52. [Google Scholar] [CrossRef]
- Khade, S.; Gite, S.; Thepade, S.D.; Pradhan, B.; Alamri, A. Detection of Iris Presentation Attacks Using Hybridization of Discrete Cosine Transform and Haar Transform with Machine Learning Classifiers and Ensembles. IEEE Access 2021, 9, 169231–169249. [Google Scholar] [CrossRef]
- Galbally, J.; Marcel, S.; Fierrez, J. Biometric Antispoofing Methods: A Survey in Face Recognition. IEEE Access 2014, 2, 1530–1552. [Google Scholar] [CrossRef]
- Khade, S.; Gite, S.; Thepade, S.D.; Pradhan, B.; Alamri, A. Detection of Iris Presentation Attacks Using Feature Fusion of Co-Occurrence Matrix Features. Sensors 2021, 21, 7408. [Google Scholar] [CrossRef] [PubMed]
- Das, P.; Mcfiratht, J.; Fang, Z.; Boyd, A.; Jang, G.; Mohammadi, A.; Purnapatra, S.; Yambay, D.; Marcel, S.; Trokielewicz, M.; et al. Iris Liveness Detection Competition (LivDet-Iris)—The 2020 Edition. In Proceedings of the 2020 IEEE International Joint Conference on Biometrics (IJCB), Houston, TX, USA, 28 September–1 October 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Shazia, A.; Xuan, T.Z.; Chuah, J.H.; Usman, J.; Qian, P.; Lai, K.W. A comparative study of multiple neural network for detection of COVID-19 on chest X-ray. EURASIP J. Adv. Signal Process. 2021, 2021, 50. [Google Scholar] [CrossRef] [PubMed]
- Kimura, G.Y.; Lucio, D.R.; Britto Jr, A.S.; Menotti, D. CNN Hyperparameter Tuning Applied to Iris Liveness Detection. arXiv 2020, arXiv:2003.00833. [Google Scholar]
- Boyd, A.; Czajka, A.; Bowyer, K. Deep Learning-Based Feature Extraction in Iris Recognition: Use Existing Models, Fine-tune or Train From Scratch? In Proceedings of the 2019 IEEE 10th International Conference on Biometrics Theory, Applications and Systems (BTAS), Tampa, FL, USA, 23–26 September 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Yadav, D.; Kohli, N.; Vatsa, M.; Singh, R.; Noore, A. Detecting Textured Contact Lens in Uncontrolled Environment Using DensePAD. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar] [CrossRef]
- Hsiao, C.-S.; Fan, C.-P. EfficientNet Based Iris Biometric Recognition Methods with Pupil Positioning by U-Net. In Proceedings of the 2021 3rd International Conference on Computer Communication and the Internet (ICCCI), Nagoya, Japan, 25–27 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Yadav, D.; Kohli, N.; Agarwal, A.; Vatsa, M.; Singh, R.; Noore, A. Fusion of Handcrafted and Deep Learning Features for Large-Scale Multiple Iris Presentation Attack Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 685–6857. [Google Scholar] [CrossRef]
- Khade, S.; Ahirrao, S.; Thepade, S. Bibliometric survey on biometric iris liveness detection. Libr. Philos. Pract. 2020, 1–29. [Google Scholar]
- Khade, S.; Ahirrao, S.; Phansalkar, S.; Kotecha, K.; Gite, S.; Thepade, S.D. Iris Liveness Detection for Biometric Authentication: A Systematic Literature Review and Future Directions. Inventions 2021, 6, 65. [Google Scholar] [CrossRef]
- Czajka, A. Pupil Dynamics for Iris Liveness Detection. IEEE Trans. Inf. Forensics Secur. 2015, 10, 726–735. [Google Scholar] [CrossRef]
- Fathy, W.S.-A.; Ali, H.S. Entropy with Local Binary Patterns for Efficient Iris Liveness Detection. Wirel. Pers. Commun. 2017, 102, 2331–2344. [Google Scholar] [CrossRef]
- Agarwal, R.; Jalal, A.S.; Arya, K.V. Local binary hexagonal extrema pattern (LBHXEP): A new feature descriptor for fake iris detection. Vis. Comput. 2020, 37, 1357–1368. [Google Scholar] [CrossRef]
- Thavalengal, S.; Nedelcu, T.; Bigioi, P.; Corcoran, P. Iris liveness detection for next generation smartphones. IEEE Trans. Consum. Electron. 2016, 62, 95–102. [Google Scholar] [CrossRef]
- Kuehlkamp, A.; Pinto, A.; Rocha, A.; Bowyer, K.W.; Czajka, A. Ensemble of Multi-View Learning Classifiers for Cross-Domain Iris Presentation Attack Detection. IEEE Trans. Inf. Forensics Secur. 2018, 14, 1419–1431. [Google Scholar] [CrossRef] [Green Version]
- Hoffman, S.; Sharma, R.; Ross, A. Iris + Ocular: Generalized Iris Presentation Attack Detection Using Multiple Convolutional Neural Networks. In Proceedings of the 2019 International Conference on Biometrics (ICB), Crete, Greece, 4–7 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Kumari, P.; Seeja, K. Periocular Biometrics for non-ideal images: With off-the-shelf Deep CNN & Transfer Learning approach. Procedia Comput. Sci. 2020, 167, 344–352. [Google Scholar] [CrossRef]
- Trokielewicz, M.; Czajka, A.; Maciejewicz, P. Presentation Attack Detection for Cadaver Iris. In Proceedings of the 2018 IEEE 9th International Conference on Biometrics Theory, Applications and Systems (BTAS), Redondo Beach, CA, USA, 22–25 October 2018; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Yambay, D.; Walczak, B.; Schuckers, S.; Czajka, A. LivDet-Iris 2015—Iris Liveness Detection Competition 2015. In Proceedings of the 2017 IEEE International Joint Conference on Biometrics (IJCB), Denver, CO, USA, 1–4 October 2017; pp. 733–741. [Google Scholar] [CrossRef]
- Yadav, D.; Kohli, N.; Doyle, J.S.; Singh, R.; Vatsa, M.; Bowyer, K. Unraveling the Effect of Textured Contact Lenses on Iris Recognition. IEEE Trans. Inf. Forensics Secur. 2014, 9, 851–862. [Google Scholar] [CrossRef]
- Kohli, N.; Yadav, D.; Vatsa, M.; Singh, R. Revisiting iris recognition with color cosmetic contact lenses. In Proceedings of the 2013 International Conference on Biometrics (ICB), Madrid, Spain, 4–7 June 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Marra, F.; Poggi, G.; Sansone, C.; Verdoliva, L. A deep learning approach for iris sensor model identification. Pattern Recognit. Lett. 2018, 113, 46–53. [Google Scholar] [CrossRef]
- Fang, Z.; Czajka, A.; Bowyer, K.W. Robust Iris Presentation Attack Detection Fusing 2D and 3D Information. IEEE Trans. Inf. Forensics Secur. 2020, 16, 510–520. [Google Scholar] [CrossRef]
- Umer, S.; Sardar, A.; Dhara, B.C.; Rout, R.K.; Pandey, H.M. Person identification using fusion of iris and periocular deep features. Neural Netw. 2019, 122, 407–419. [Google Scholar] [CrossRef] [PubMed]
- Arora, S.; Bhatia, M.P.S.; Kukreja, H. A Multimodal Biometric System for Secure User Identification Based on Deep Learning. Adv. Intell. Syst. Comput. 2021, 1183, 95–103. [Google Scholar] [CrossRef]
- Hsiao, C.S.; Fan, C.P.; Hwang, Y.T. Iris location and recognition by deep-learning networks based design for biometric authorization. In Proceedings of the 2021 IEEE 3rd Global Conference on Life Sciences and Technologies (LifeTech), Nara, Japan, 9–11 March 2021; pp. 144–145. [Google Scholar] [CrossRef]
- Hsiao, C.S.; Fan, C.P.; Hwang, Y.T. Design and Analysis of Deep-Learning Based Iris Recognition Technologies by Combination of U-Net and EfficientNet. In Proceedings of the 2021 9th International Conference on Information and Education Technology (ICIET), Okayama, Japan, 27–29 March 2021; pp. 433–437. [Google Scholar] [CrossRef]
- Chatterjee, P.; Yalchin, A.; Shelton, J.; Roy, K.; Yuan, X.; Edoh, K.D. Presentation Attack Detection Using Wavelet Transform and Deep Residual Neural Net. In International Conference on Security, Privacy and Anonymity in Computation, Communication and Storage; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets Features | Parameters |
|---|---|
| Total Instances | 3588 |
| Total Training Data | 1436 |
| Total Validation Data | 358 |
| Total Testing Data | 1794 |
| Number of classes | 2 |
| Live Iris Images |  |
| Fake Iris Images |  |
| Datasets Features | Parameters |
|---|---|
| Total Instance | 2000 |
| Total Training Data | 800 |
| Total Validation Data | 200 |
| Total Testing Data | 1000 |
| Number of classes | 2 |
| Live iris images |  |
| Fake iris images |  |
| Datasets Features | Parameters |
|---|---|
| Total Instance | 1640 |
| Total Training Data | 656 |
| Total Validation Data | 164 |
| Total Testing Data | 820 |
| Number of classes | 2 |
| Live Iris Images |  |
| Fake Iris Images |  |
| Dataset | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 |
|---|---|---|---|
| Validation accuracy (%) | 99.72 | 99.75 | 98.78 |
| Training accuracy (%) | 99.23 | 98.75 | 1 |
| Validation loss (%) | 0.62 | 3.05 | 11.74 |
| Training loss (%) | 3.11 | 6.23 | 0.000003 |
| Precision (%) | 100 | 85.00 | 100 |
| Recall (%) | 100 | 85.00 | 100 |
| F1-score (%) | 100 | 85.00 | 100 |
| APCER (%) | 0.14 | 0.136 | 0 |
| BPCER (%) | 0.49 | 0.158 | 0.2 |
| ACER (%) | 0.32 | 0.147 | 0.1 |
| Training time (s) | 2983 | 2938 | 1297 |
| Testing time (s) | 888 | 502 | 417 |
| Dataset | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 |
|---|---|---|---|
| Validation accuracy (%) | 99.44 | 71.5 | 94.5 |
| Training accuracy (%) | 99.79 | 59.13 | 98.37 |
| Validation loss (%) | 2.47 | 63.57 | 1.3255 |
| Training loss (%) | 0.69 | 10.15 | 3.902 |
| Precision (%) | 99.0 | 71.00 | 99.0 |
| Recall (%) | 99.0 | 70.00 | 99.0 |
| F1-score (%) | 99.0 | 70.00 | 99.0 |
| APCER (%) | 0 | 30.6 | 3.4375 |
| BPCER (%) | 2.9925 | 28.4 | 0 |
| ACER (%) | 1.4962 | 29.5 | 1.7187 |
| Training time (s) | 877 | 656 | 724 |
| Testing time (s) | 365 | 194 | 216 |
| Dataset | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 |
|---|---|---|---|
| Validation accuracy (%) | 99.72 | 91.5 | 99.39 |
| Training accuracy (%) | 99.79 | 99.75 | 100 |
| Validation loss (%) | 0.3 | 47.33 | 1.19 |
| Training loss (%) | 1.28 | 0.78 | 0.0086 |
| Precision (%) | 100 | 98.00 | 100 |
| Recall (%) | 100 | 98.00 | 100 |
| F1-score (%) | 100 | 98.00 | 100 |
| APCER (%) | 0 | 0 | 0 |
| BPCER (%) | 0.748 | 3.6 | 0.2 |
| ACER (%) | 0.374 | 1.8 | 0.1 |
| Training time (s) | 945 | 537 | 398 |
| Testing time (s) | 296 | 165 | 121 |
| Dataset | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 |
|---|---|---|---|
| Validation Accuracy (%) | 98.32 | 88 | 98.78 |
| Training Accuracy (%) | 98.26 | 89.88 | 99.54 |
| Validation Loss (%) | 03.96 | 40.64 | 03.59 |
| Training Loss (%) | 05.29 | 24.68 | 01.09 |
| Precision (%) | 99.00 | 93.00 | 100 |
| Recall (%) | 99.00 | 93.00 | 100 |
| F1-score (%) | 99.00 | 93.00 | 100 |
| APCER (%) | 0.3589 | 9.2 | 0.9375 |
| BPCER (%) | 2.7431 | 4.6 | 0 |
| ACER (%) | 1.551 | 6.9 | 0.4687 |
| Training Time (s) | 907 | 587 | 300 |
| Testing Time (s) | 256 | 162 | 87 |
| Dataset | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 |
|---|---|---|---|
| Validation accuracy (%) | 99.44 | 94.5 | 99.97 |
| Training accuracy (%) | 99.16 | 1 | 100 |
| Validation loss (%) | 04.28 | 21.41 | 00.47 |
| Training loss (%) | 0.42 | 00.25 | 00.11 |
| Precision (%) | 98.00 | 99.00 | 100 |
| Recall (%) | 98.00 | 99.00 | 100 |
| F1-score (%) | 98.00 | 99.00 | 100 |
| APCER (%) | 1.5793 | 0.2 | 0 |
| BPCER (%) | 5.2369 | 2 | 0 |
| ACER (%) | 3.4081 | 1.1 | 0 |
| Training time (s) | 2003 | 1092 | 1098 |
| Testing time (s) | 644 | 334 | 319 |
| Datasets | Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CNN Model | TP | TN | FP | FN | TP | TN | FP | FN | TP | TN | FP | FN |
| VGG-16 | 399 | 1391 | 2 | 2 | 421 | 432 | 68 | 79 | 499 | 500 | 0 | 1 |
| InceptionV3 | 389 | 1393 | 0 | 12 | 358 | 347 | 153 | 142 | 500 | 309 | 11 | 0 |
| ResNet50 | 389 | 1393 | 0 | 3 | 482 | 500 | 0 | 18 | 499 | 320 | 0 | 1 |
| DenseNet121 | 390 | 1388 | 5 | 11 | 477 | 454 | 46 | 23 | 500 | 317 | 3 | 0 |
| EfficientNetB7 | 380 | 1371 | 22 | 21 | 490 | 499 | 1 | 10 | 500 | 500 | 0 | 0 |
| Clarkson 2015 | IIITD_Contact | ND Iris3D_2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| CNN Model | Accuracy | ACER | Time/s | Accuracy | ACER | Time/s | Accuracy | ACER | Time/s |
| VGG-16 | 99.72 | 0.32 | 888 | 99.75 | 0.14 | 502 | 98.78 | 0.1 | 417 |
| InceptionV3 | 99.44 | 1.49 | 365 | 71.50 | 29.5 | 194 | 94.50 | 1.72 | 216 |
| ResNet50 | 99.44 | 1.49 | 296 | 91.50 | 1.8 | 165 | 99.39 | 0.1 | 121 |
| DenseNet121 | 98.32 | 1.55 | 256 | 88.00 | 6.9 | 162 | 98.78 | 0.46 | 87 |
| EfficientNetB7 | 99.44 | 3.40 | 644 | 94.50 | 1.1 | 334 | 99.97 | 0 | 319 |
| Paper ID | Year | Models | Datasets | Performance measures | Results (%) | |
|---|---|---|---|---|---|---|
| Comparison with the same datasets | [5] | 2021 | ND PAD, MSU PAD1, MSU PAD2 | WUT, ND, CU | APCER, BPCER, ACER | ACER = 2.61 ACER = 2.18 ACER = 28.96 |
| [28] | 2021 | VGGNet LeNet ConvNet | IIITD | Accuracy FAR | Accuracy = 97.98 Accuracy = 89.38 Accuracy = 98.99 | |
| Comparison with different datasets | [29] | 2021 | VGG16, YOLO | Self-made database | Accuracy FAR, FRR | Accuracy = 98 |
| [30] | 2021 | EfficientNet | CASIA v1 | Accuracy FAR, FRR | Accuracy = 98 | |
| [27] | 2020 | VGG16, ResNet50, Inception-v3 | UPOL, CASIA | CCR | CCR = 99.64 | |
| [31] | 2019 | ResNet | ATVS | Accuracy | Accuracy = 92.57 | |
| Suggested Analysis | VGG-16, Inceptionv3, Resnet50, Densenet121, and EfficientNetB7 | Clarkson 2015, IIITD Contact Lens, ND_Iris3D_2020 | Accuracy, Loss, APECR, NPCER, ACER | Accuracy = 99.97 ACER = 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khade, S.; Gite, S.; Pradhan, B. Iris Liveness Detection Using Multiple Deep Convolution Networks. Big Data Cogn. Comput. 2022, 6, 67. https://doi.org/10.3390/bdcc6020067
Khade S, Gite S, Pradhan B. Iris Liveness Detection Using Multiple Deep Convolution Networks. Big Data and Cognitive Computing. 2022; 6(2):67. https://doi.org/10.3390/bdcc6020067
Chicago/Turabian StyleKhade, Smita, Shilpa Gite, and Biswajeet Pradhan. 2022. "Iris Liveness Detection Using Multiple Deep Convolution Networks" Big Data and Cognitive Computing 6, no. 2: 67. https://doi.org/10.3390/bdcc6020067
APA StyleKhade, S., Gite, S., & Pradhan, B. (2022). Iris Liveness Detection Using Multiple Deep Convolution Networks. Big Data and Cognitive Computing, 6(2), 67. https://doi.org/10.3390/bdcc6020067