A Neural Network Propagation Model for LoRaWAN and Critical Analysis with Real-World Measurements




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
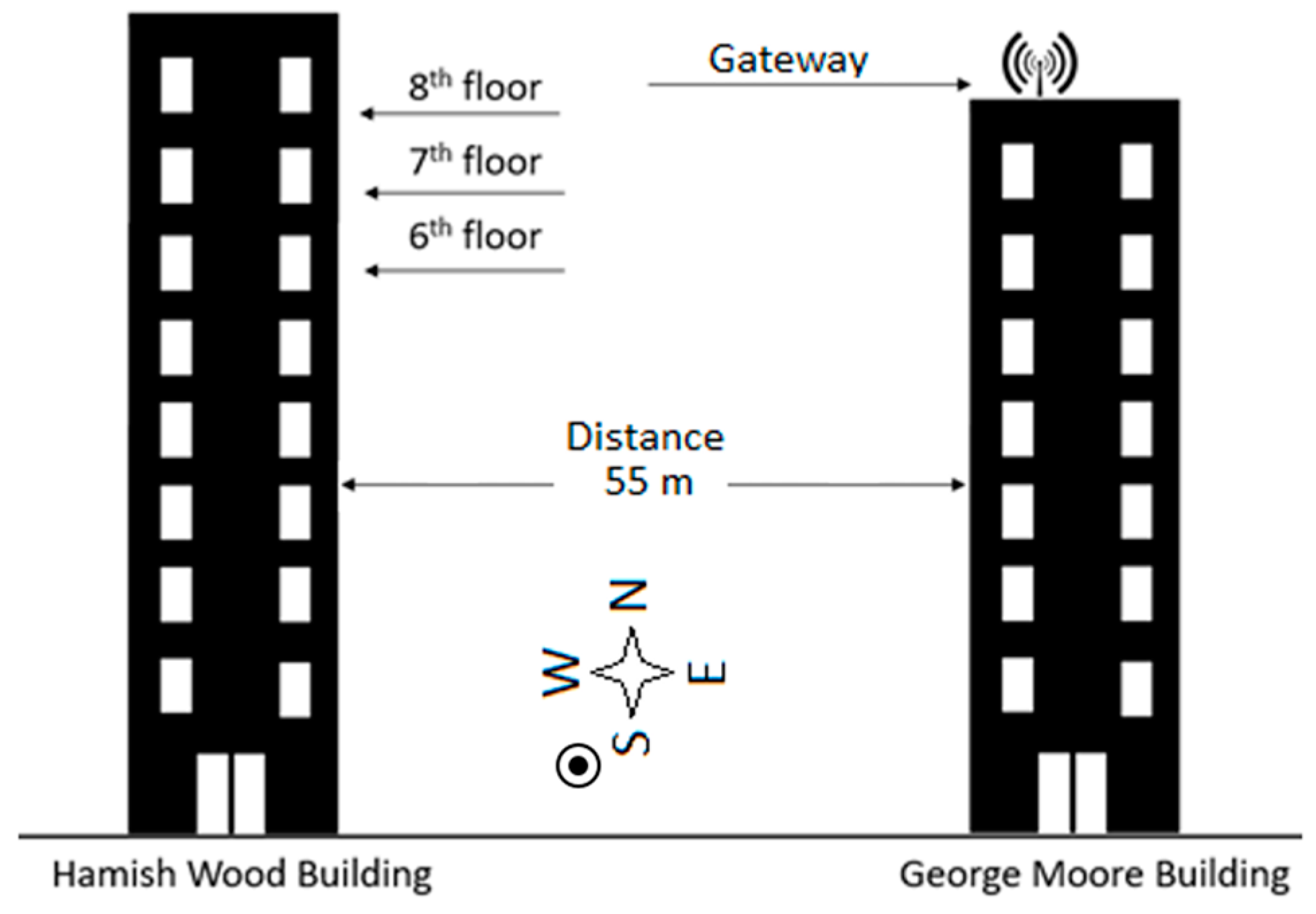
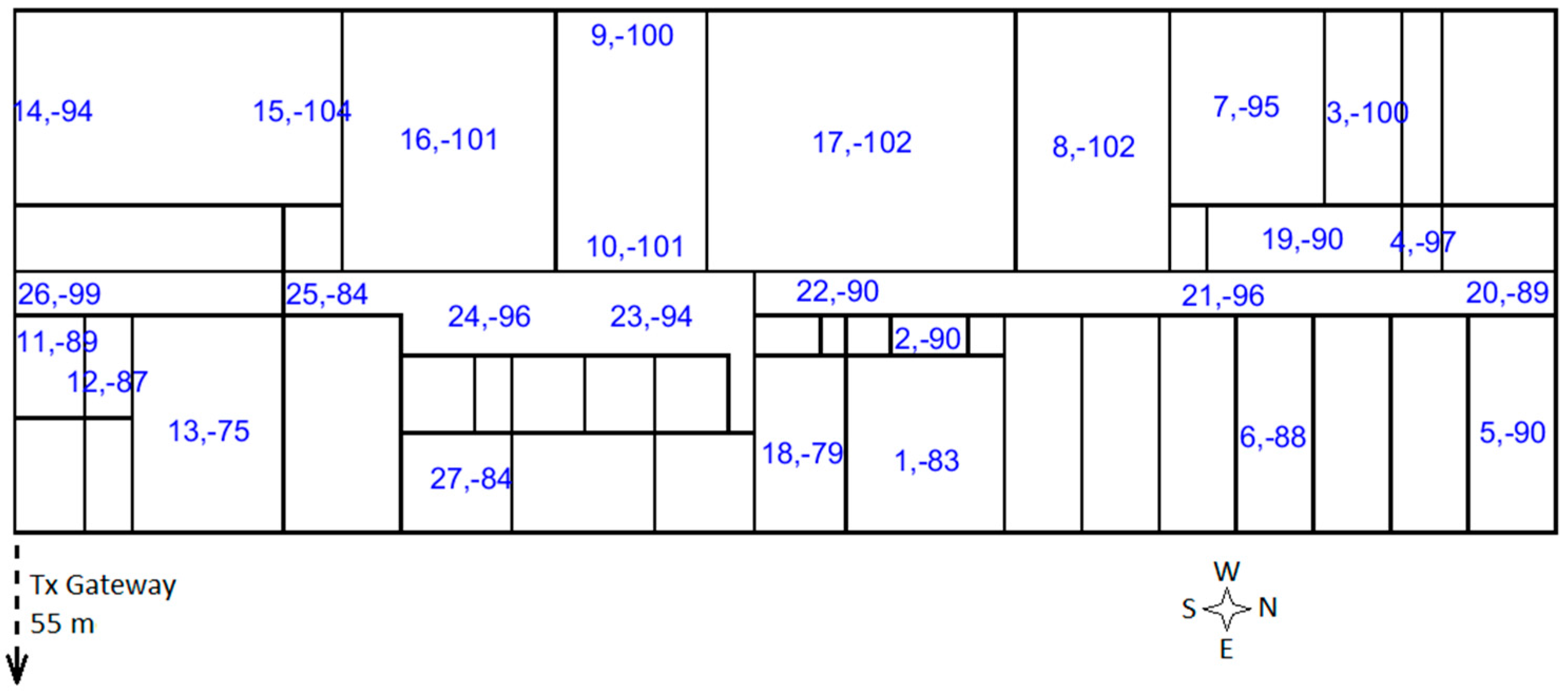
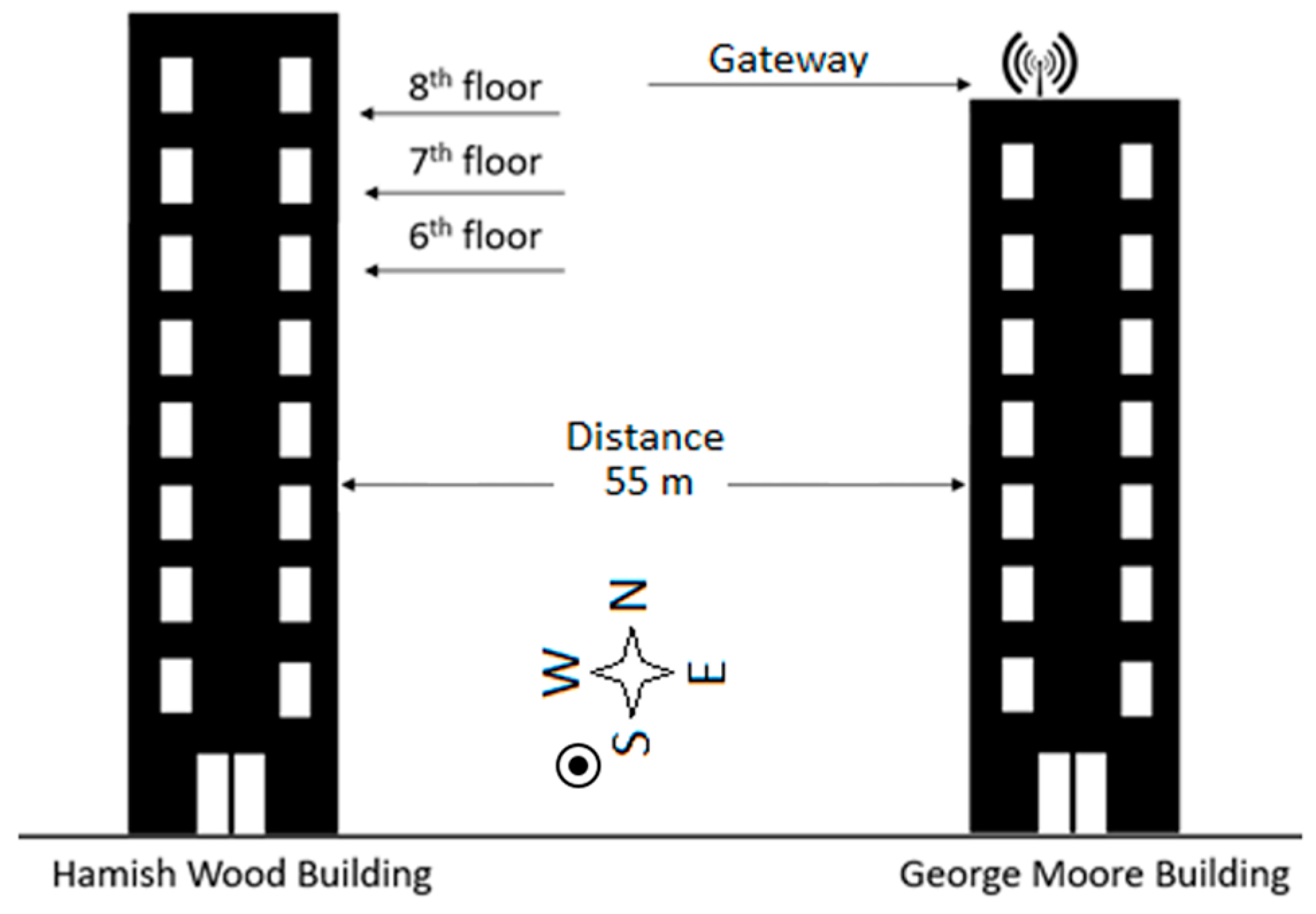
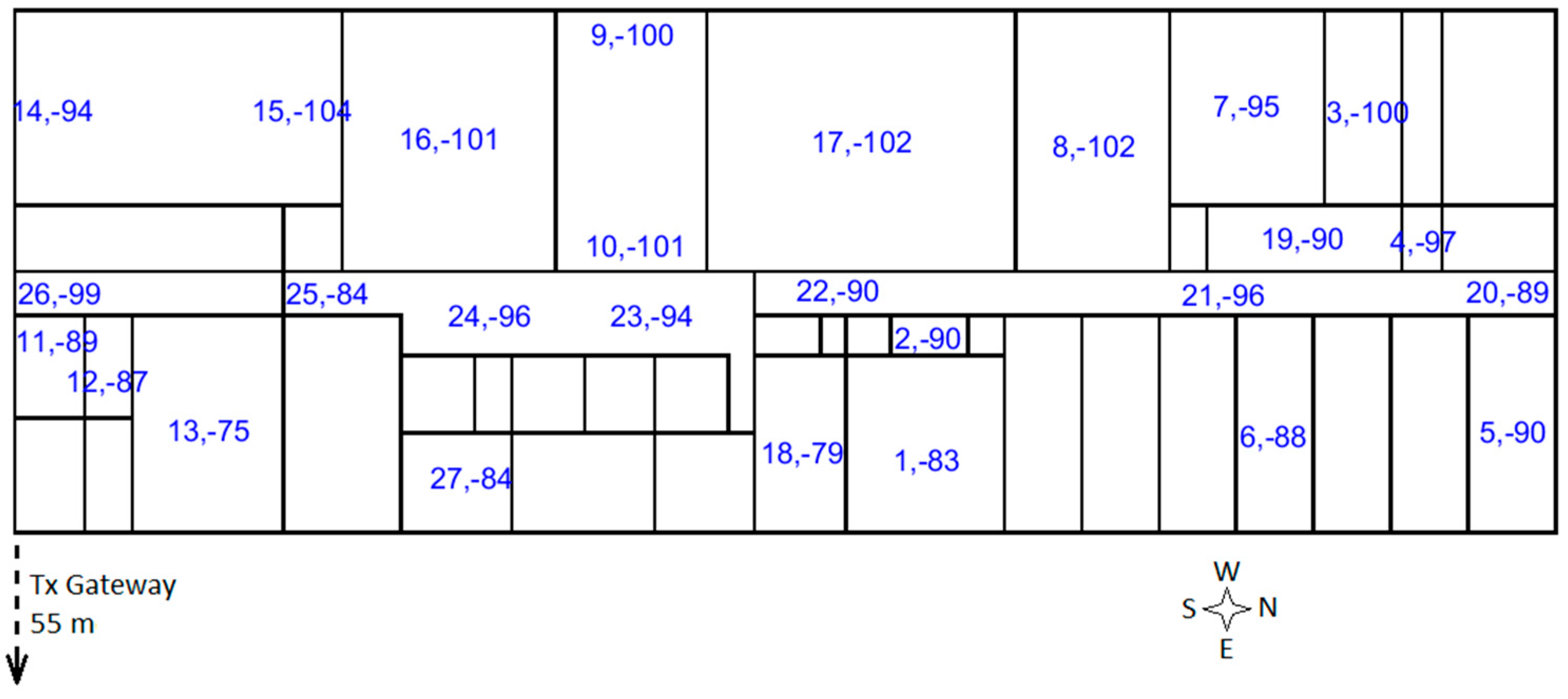
2. Data Collection Setup
3. Propagation Modeling
3.1. Log Distance
3.2. COST231
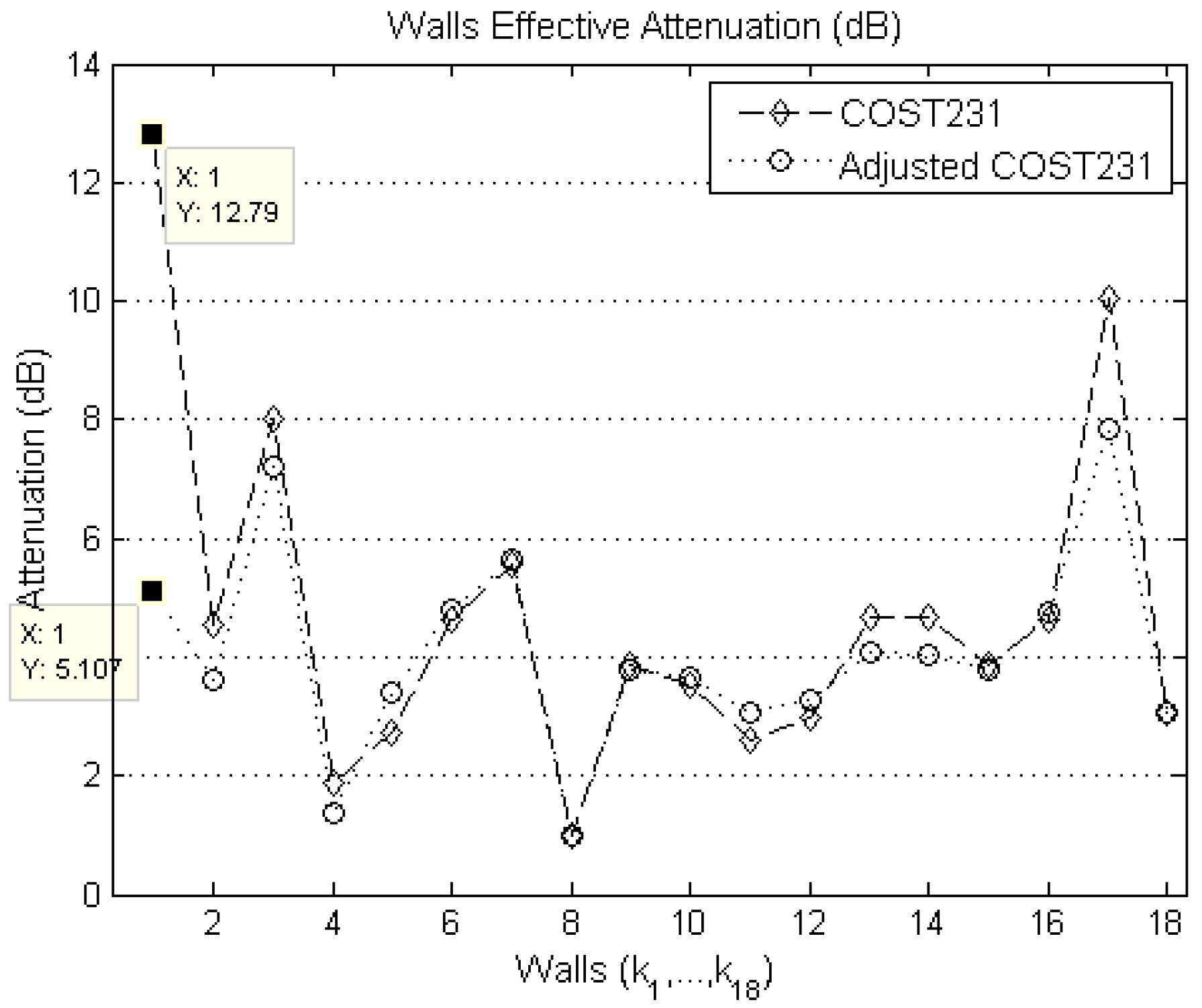
3.3. Adjusted COST231
3.4. Optimization
3.5. Artificial Neural Network
- Total number of walls blocking the LoS ()
- Total attenuation caused by the blocking walls ()
- Attenuation caused by distance and loss exponents ()
- Set of () coordinates to specify the measurement location inside the building
4. Data Analysis Result
4.1. Log-Distance
4.2. COST231
4.3. Adjusted COST231
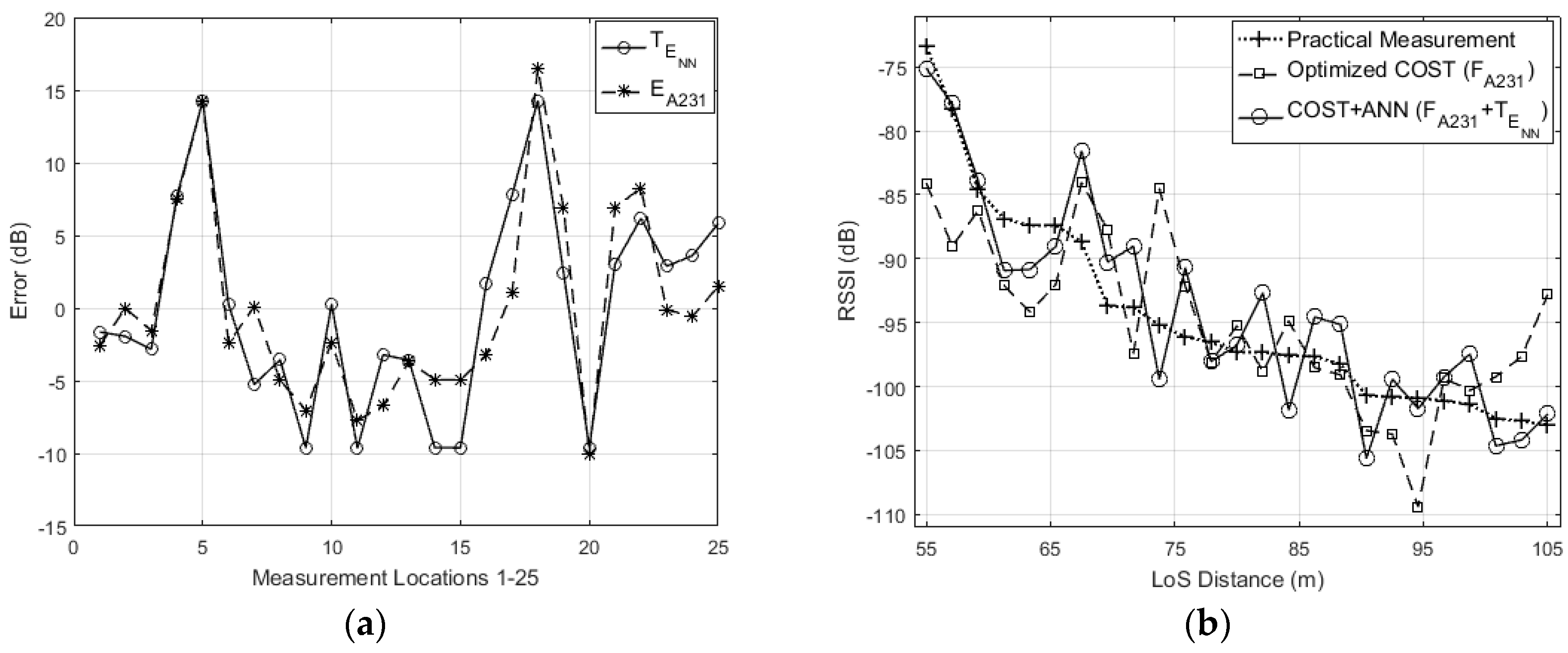
4.4. Hybrid Model
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Interference Impact on Coverage and Capacity for Low Power Wide Area IoT Networks. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Thielemans, S.; Bezunartea, M.; Steenhaut, K. Establishing transparent IPv6 communication on LoRa based low power wide area networks (LPWANS). In Proceedings of the 2017 Wireless Telecommunications Symposium (WTS), Chicago, IL, USA, 26–28 April 2017. [Google Scholar]
- Petäjäjärvi, J.; Mikhaylov, K.; Yasmin, R.; Hämäläinen, M.; Iinatti, J. Evaluation of LoRa LPWAN technology for indoor remote health and wellbeing monitoring. Int. J. Wirel. Inform. Netw. 2017, 24, 153–165. [Google Scholar] [CrossRef]
- Weber, P.; Jäckle, D.; Rahusen, D.; Sikora, A. IPv6 over LoRaWANTM. In Proceedings of the 2016 3rd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Offenburg, Germany, 26–27 September 2016. [Google Scholar]
- Nolan, K.E.; Guibene, W.; Kelly, M.Y. An evaluation of low power wide area network technologies for the Internet of Things. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Cyprus, Paphos, 5–9 September 2016. [Google Scholar]
- Robert, J.; Heuberger, A. LPWAN downlink using broadcast transmitters. In Proceedings of the 2017 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Caligari, Italy, 7–9 June 2017. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Wixted, A.J.; Kinnaird, P.; Larijani, H.; Tait, A.; Ahmadinia, A.; Strachan, N. Evaluation of LoRa and LoRaWAN for wireless sensor networks. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- Wixted, A. Surveying the Operating Range of LoRa Wireless in Glasgow CBD. 2016. Available online: http://www.stream-technologies.com/whitepapers/lora-range-survey/ (accessed on 12 December 2017).
- Wixted, A. Stream Technologies LoRaWAN Networking Study. 2016. Available online: http://www.stream-technologies.com/whitepapers/lorawan-networking-study/ (accessed on 12 December 2017).
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015. [Google Scholar]
- Lukas; Tanumihardja, W.A.; Gunawan, E. On the application of IoT: Monitoring of troughs water level using WSN. In Proceedings of the 2015 IEEE Conference on Wireless Sensors (ICWiSe), Melaka, Malaysia, 24–26 August 2015. [Google Scholar]
- Aref, M.; Sikora, A. Free space range measurements with Semtech LoRaTM technology. In Proceedings of the 2014 2nd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS-SWS), Offenburg, Germany, 11–12 September 2014. [Google Scholar]
- Hosseinzadeh, S.; Larijani, H.; Wixted, A.; Curtis, K.; Amini, A. Empirical propagation performance evaluation of LoRa for indoor environment. In Proceedings of the 2017 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017. [Google Scholar]
- Semthec. Whats LoRa? 2017. Available online: http://www.semtech.com/wireless-rf/internet-of-things/what-is-lora/ (accessed on 9 May 2017).
- Neumann, P.; Montavont, J.; Noël, T. Indoor deployment of low-power wide area networks (LPWAN): A LoRaWAN case study. In Proceedings of the 2016 IEEE 12th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), New York, NY, USA, 17–19 October 2016. [Google Scholar]
- Mikhaylov, K.; Petaejaejaervi, J.; Haenninen, T. Analysis of capacity and scalability of the LoRa low power wide area network technology. In Proceedings of the 22rd European Wireless Conference on European Wireless, Oulu, Finland, 18–20 May 2016. [Google Scholar]
- Qiu, L.; Jiang, D.; Hanlen, L. Neural network prediction of radio propagation. In Proceedings of the 6th Australian Communications Theory Workshop, Brisbane, Australia, 2–4 February 2005. [Google Scholar]
- Neskovic, A.; Neskovic, N.; Paunovic, D. Indoor electric field level prediction model based on the artificial neural networks. IEEE Commun. Lett. 2000, 4, 190–192. [Google Scholar] [CrossRef]
- Wolfle, G.; Landstorfer, F.M. Field strength prediction in indoor environments with neural networks. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference, Phoenix, AZ, USA, 4–7 May 1997. [Google Scholar]
- Popescu, I.; Nafornita, I.; Gavriloaia, G.; Constantinou, P.; Gordan, C. Field strength prediction in indoor environment with a neural model. In Proceedings of the TELSIKS 2001 5th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Service, Nis, Yugoslavia, 19–21 September 2001. [Google Scholar]
- Wolfle, G.; Landstorfer, F.M. Dominant paths for the field strength prediction. In Proceedings of the 1998 48th IEEE Vehicular Technology Conference, Ottawa, ON, Canada, 21 May 1998. [Google Scholar]
- Popescu, I.; Nikitopoulos, D.; Nafornita, I.; Constantinou, P. ANN prediction models for indoor environment. In Proceedings of the 2006 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Montreal, QC, Canada, 19–21 June 2006. [Google Scholar]
- Zhou, H.; Wang, F.; Yang, C. Application of artificial neural networks to the prediction of field strength in indoor environment for wireless LAN. In Proceedings of the 2005 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–26 September 2005. [Google Scholar]
- Neskovic, A.; Neskovic, N. Microcell electric field strength prediction model based upon artificial neural networks. AEU Int. J. Electron. Commun. 2010, 64, 733–738. [Google Scholar] [CrossRef]
- Multitech. MultiConnect mDot Long Range RF Modules (MTDOT Series). 2016. Available online: https://www.multitech.com/brands/multiconnect-mdot (accessed on 12 December 2017).
- Kerlink. LoRa IoT Station. 2017. Available online: www.kerlink.fr/images/Kerlink/fiches_produit/LoRa-IoT-Station.pdf (accessed on 12 December 2017).
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007. [Google Scholar]
- Final Report for COST Action 231, Chapter 4. European Cooperation in Science and Technology. Available online: http://www.lx.it.pt/cost231/final_report.htm (accessed on 12 December 2017).
- Hosseinzadeh, S. Multi-wall Signal Propagation Model. 2016. Available online: http://www.mathworks.com/matlabcentral/fileexchange/61340-multi-wall--cost231----free-space-signal-propagation-models (accessed on 12 December 2017).
- Hosseinzadeh, S.; Larijani, H.; Curtis, K. An enhanced modified multi wall propagation model. In Proceedings of the 2017 Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017. [Google Scholar]
- Alhamoud, A.; Kreger, M.; Afifi, H.; Gottron, C.; Burgstahler, D.; Englert, F.; Böhnstedt, D.; Steinmetz, R. Empirical investigation of the effect of the doorś state on received signal strength in indoor environments at 2.4 GHz. In Proceedings of the 39th Annual IEEE Conference on Local Computer Networks Workshops (LCN Workshops), Edmonton, AB, Canada, 8–11 September 2014. [Google Scholar]
- Hassoun, M.H. Fundamentals of Artificial Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- International Telecommunication Union. Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz; ITU Recommendation P.2040-1; International Telecommunication Union: Geneva, Switzerland, 2015. [Google Scholar]
- Rudd, R.; Craig, K.; Ganley, M.; Hartless, R. Building Material and Propagation Final Report; Ofcom: London, UK, 2014. [Google Scholar]
- Molkdar, D. Review on radio propagation into and within buildings. IEE Proc. H Microw. Antennas Propag. 1991, 138, 61–73. [Google Scholar] [CrossRef]
- Angskog, P.; Backstrom, M.; Vallhagen, B. Measurement of radio signal propagation through window panes and energy saving windows. In Proceedings of the 2015 IEEE International Symposium on Electromagnetic Compatibility (EMC), Dresden, Germany, 16–22 August 2015. [Google Scholar]
- Rodriguez, I.; Nguyen, H.C.; Jorgensen, N.T.K.; Sorensen, T.B.; Mogensen, P. Radio Propagation into Modern Buildings: Attenuation Measurements in the Range from 800 MHz to 18 GHz. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC Fall), Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar]
- Gustafsson, M.; Karlsson, A.; Rebelo, A.P.P.; Widenberg, B. Design of frequency selective windows for improved indoor outdoor communication. IEEE Antennas Propag. Trans. 2006, 54, 1897–1900. [Google Scholar] [CrossRef]
- Okamoto, H.; Kitao, K.; Ichitsubo, S. Outdoor-to-Indoor Propagation Loss Prediction in 800-MHz to 8-GHz Band for an Urban Area. IEEE Trans. Veh. Technol. 2009, 58, 1059–1067. [Google Scholar] [CrossRef]




© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hosseinzadeh, S.; Almoathen, M.; Larijani, H.; Curtis, K. A Neural Network Propagation Model for LoRaWAN and Critical Analysis with Real-World Measurements. Big Data Cogn. Comput. 2017, 1, 7. https://doi.org/10.3390/bdcc1010007
Hosseinzadeh S, Almoathen M, Larijani H, Curtis K. A Neural Network Propagation Model for LoRaWAN and Critical Analysis with Real-World Measurements. Big Data and Cognitive Computing. 2017; 1(1):7. https://doi.org/10.3390/bdcc1010007
Chicago/Turabian StyleHosseinzadeh, Salaheddin, Mahmood Almoathen, Hadi Larijani, and Krystyna Curtis. 2017. "A Neural Network Propagation Model for LoRaWAN and Critical Analysis with Real-World Measurements" Big Data and Cognitive Computing 1, no. 1: 7. https://doi.org/10.3390/bdcc1010007
APA StyleHosseinzadeh, S., Almoathen, M., Larijani, H., & Curtis, K. (2017). A Neural Network Propagation Model for LoRaWAN and Critical Analysis with Real-World Measurements. Big Data and Cognitive Computing, 1(1), 7. https://doi.org/10.3390/bdcc1010007