Comparison and Sensibility Analysis of Warning Parameters for Rotating Stall Detection in an Axial Compressor


Abstract
1. Introduction
2. Materials and Methods
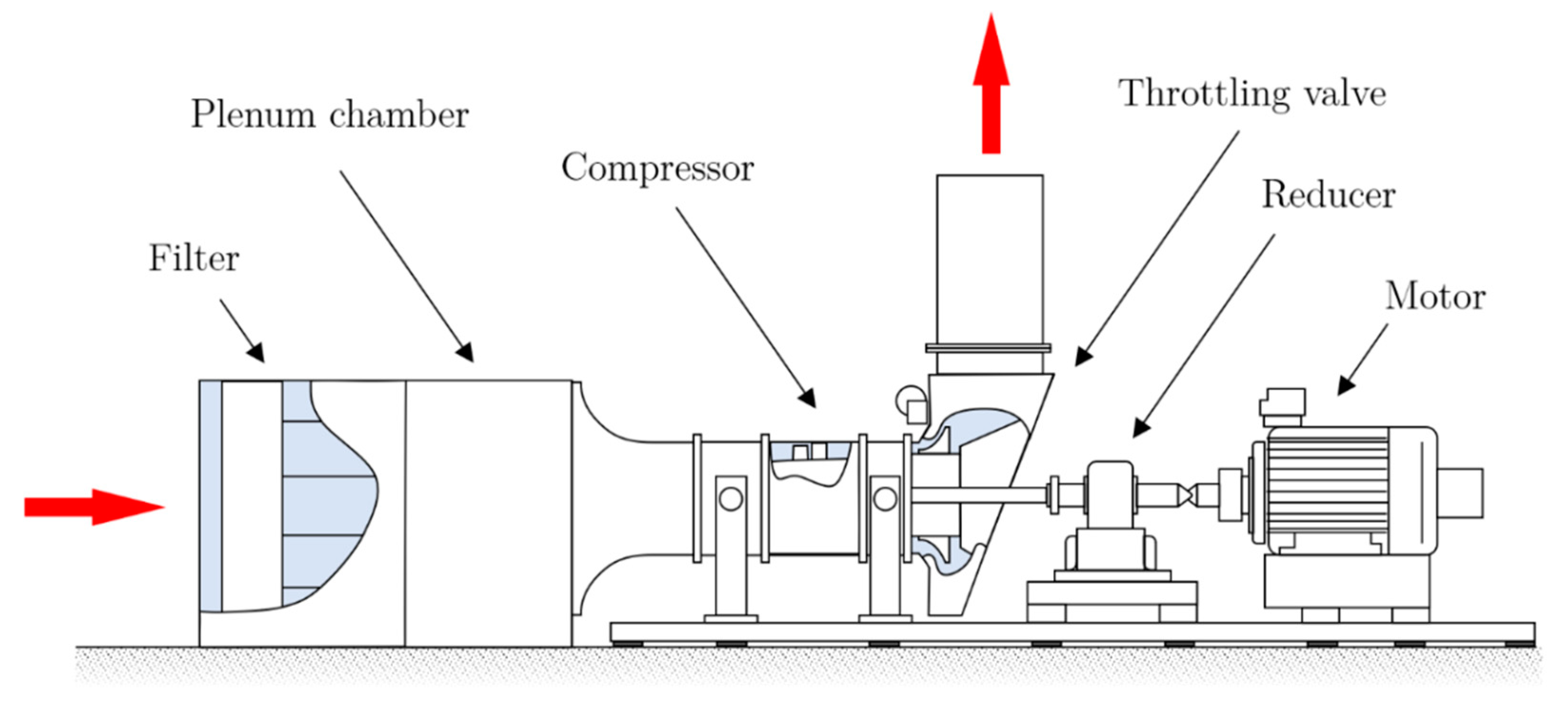
2.1. Experimental Setup
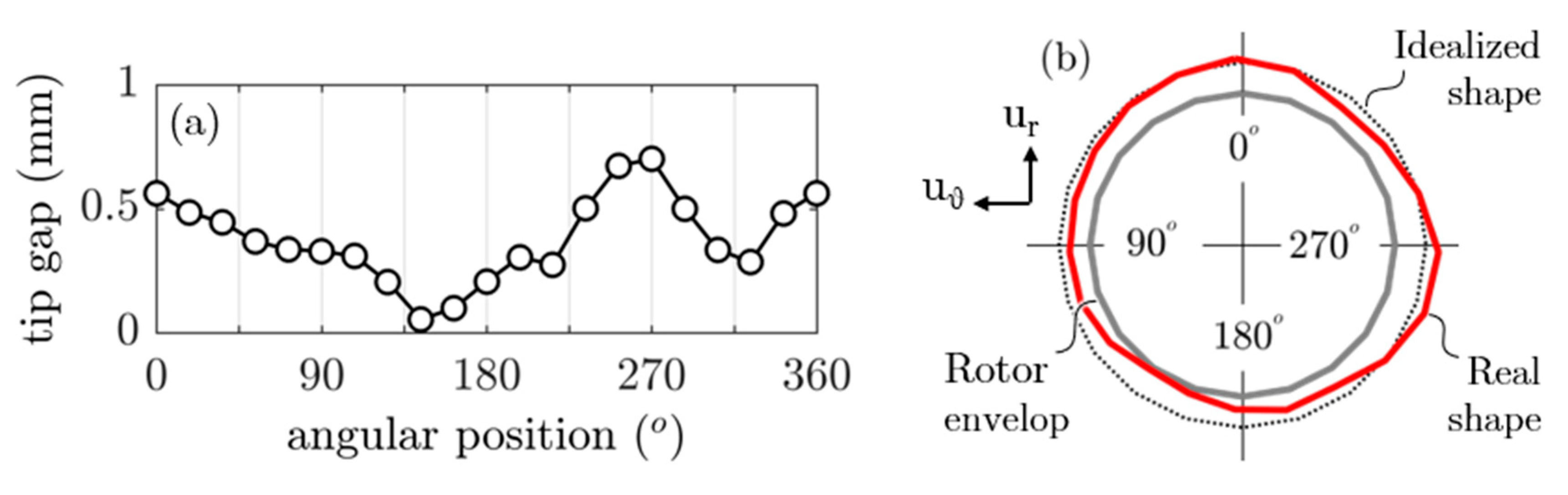
- For the first one, 20 transducers were non-evenly distributed at the same axial position (x/Cx = −0.06) to refine the sensor ring, and thus to have access to a more precise monitoring of the perturbations, in different regions, but also to take into account geometrical disparities (eccentricity, casing surface defect, etc.). Each location is represented by a red dot on Figure 3a;
- For the second one, at four angular locations, 12 transducers were positioned over three axial positions [x/Cx = (−0.06; 0.55; 1.06)]. At a fifth angular position, eight more sensors were placed every 6 mm, to refine the discretization in the axial direction from just upstream of the leading edge (LE) to mid-chord. Each location is respectively represented by a blue diamond (12 sensors) and a green triangle (8 sensors) on Figure 3b.
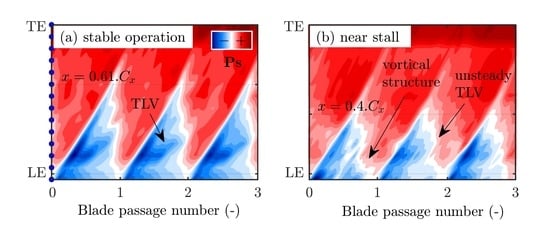
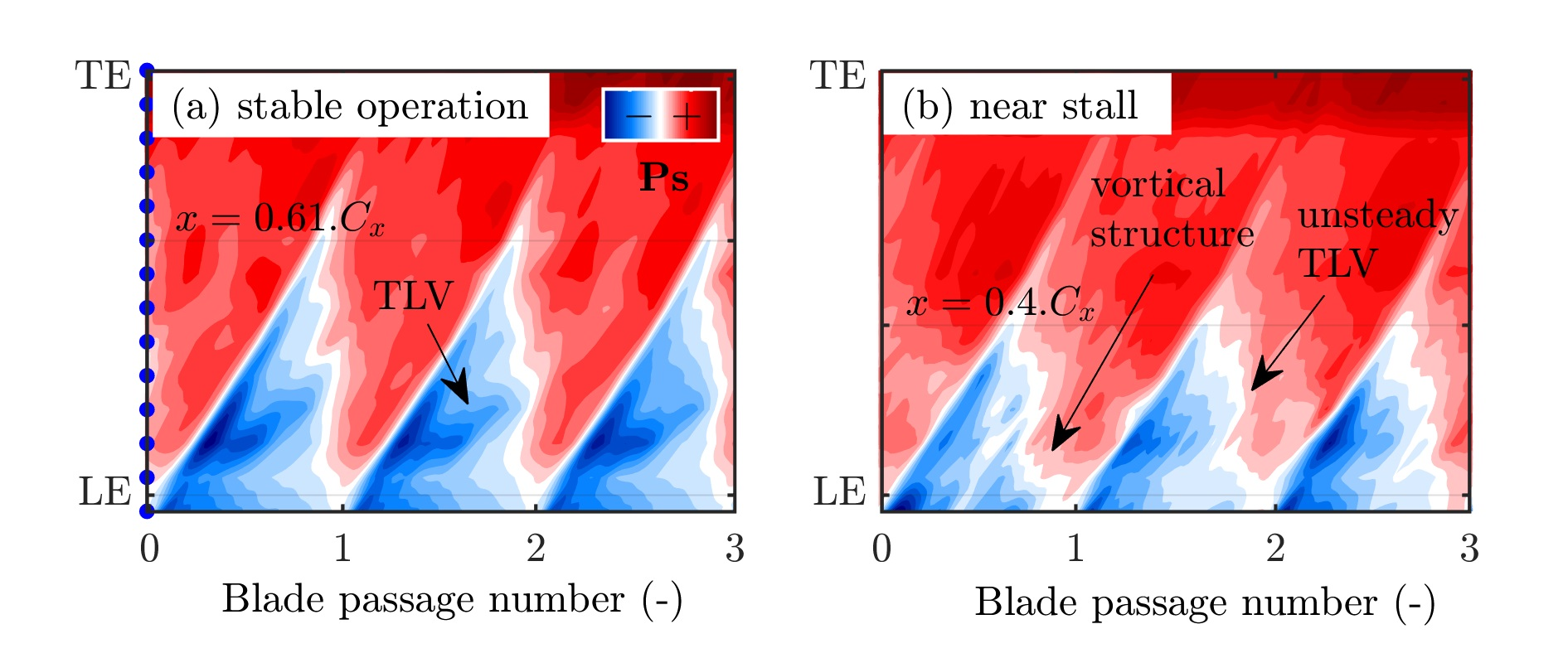
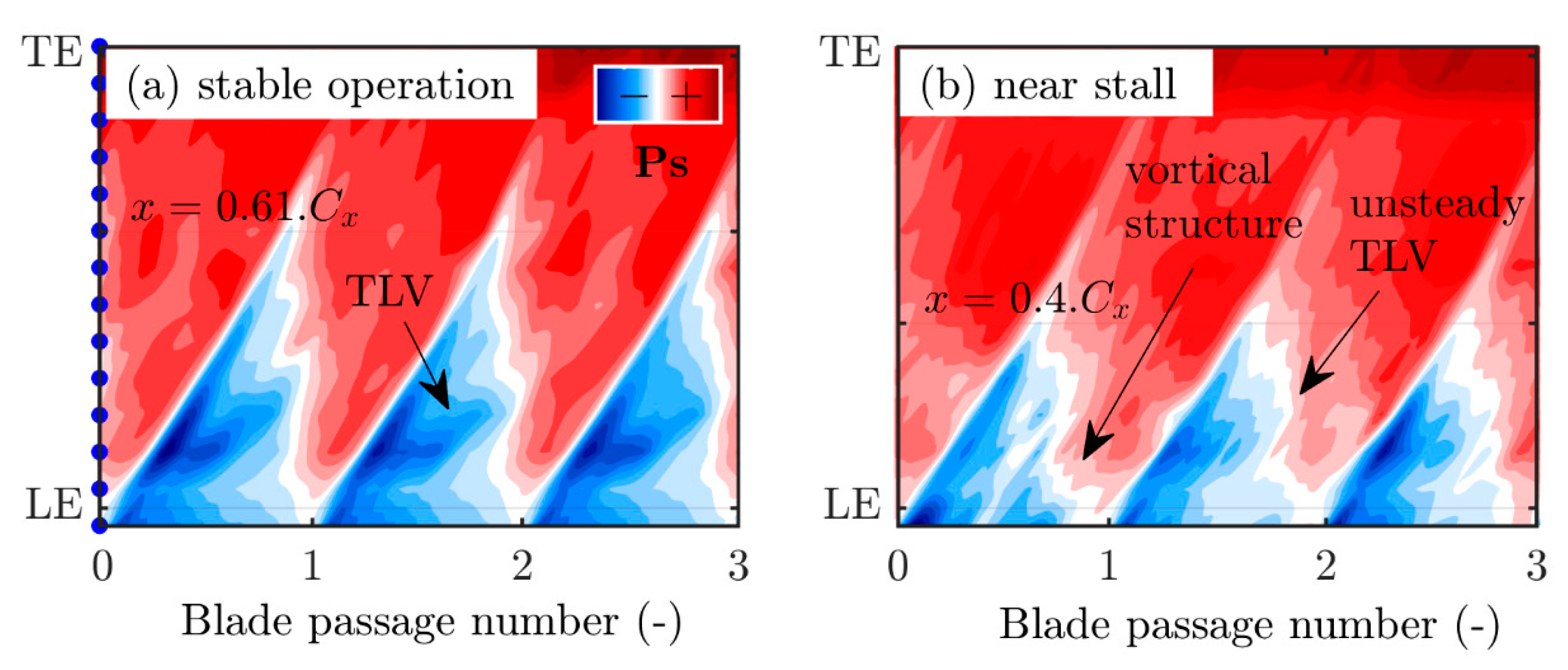
- The third one has been solely used to analyze pressure contours from leading edge to trailing edge with enough accuracy at different operating points. For that purpose, 14 sensors, 4 mm apart, have been used. Their location is depicted on Figure 3c.
2.2. Experimental Procedure
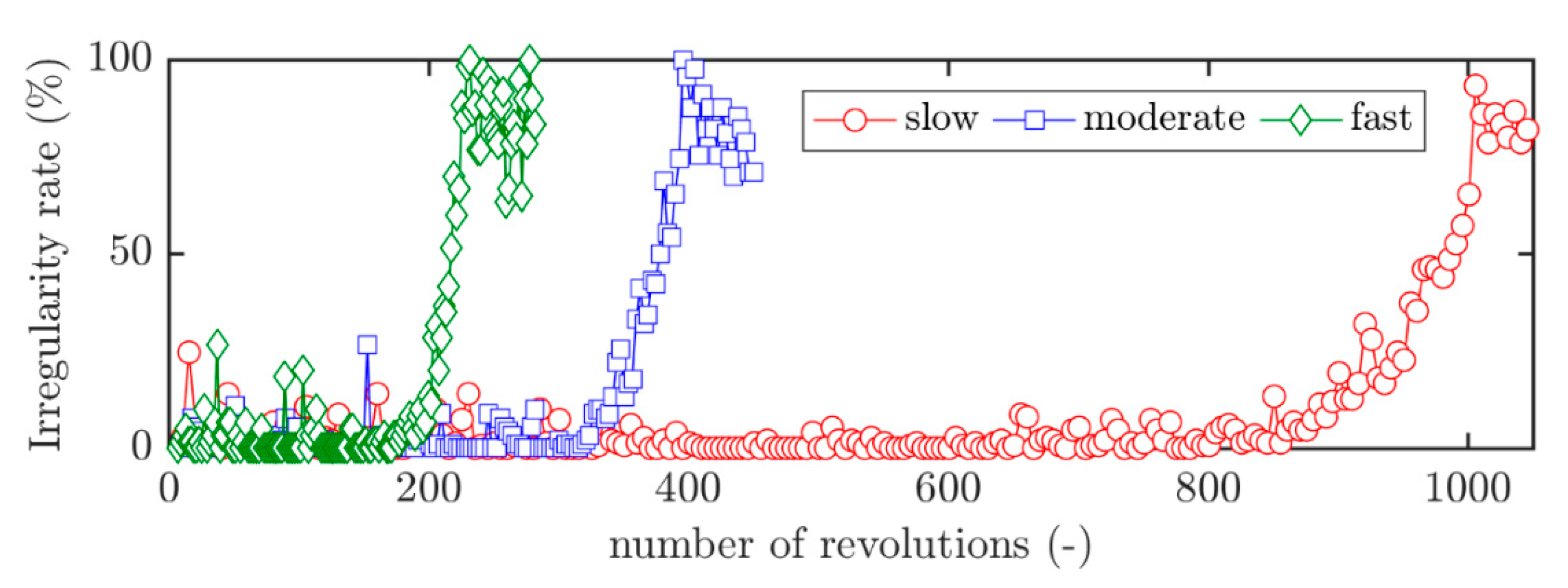
- The first one corresponds to a complete throttling. For this procedure, the mass flow rate is decreased continuously until the rotating stall appears (red circle “2”). Three rates of decrease have been investigated, respectively equal to 0.30, 0.17, and 0.06 kg·s−2, and labelled fast, moderate and slow throttling speed in the following. The decrease rate of the mass flow rate is depicted in a previous article (see [17]). In this case, the rotating stall onset is forced;
- The second one corresponds to partial throttling. In this case, the process is stopped just before the onset of the rotating stall, at the last stable operating point (red circle “1”), by a mechanical stop. The compressor continues to operate until it enters stall, or not. In this procedure, the rotating stall is spontaneous.
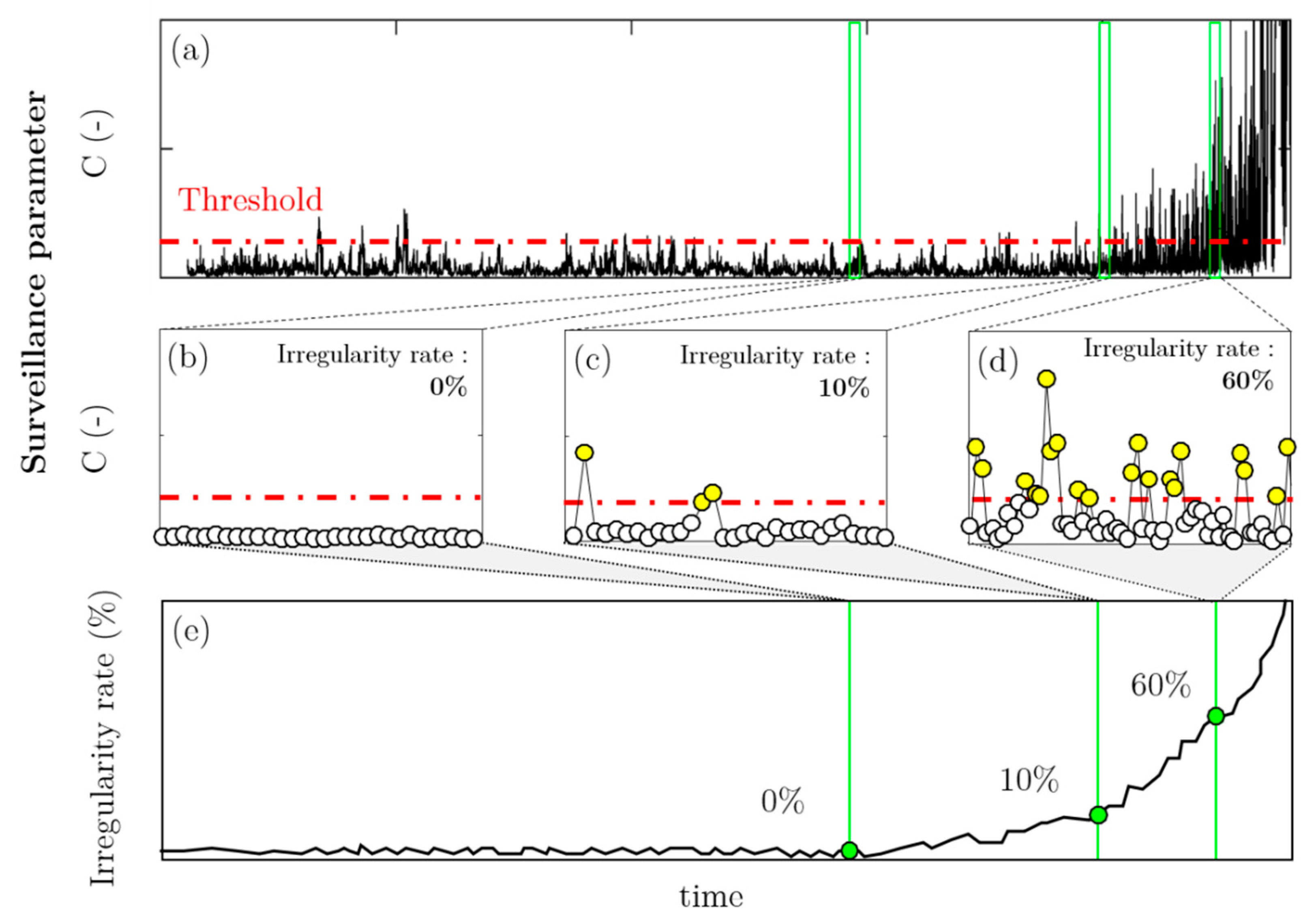
2.3. Stall Warning Parameters
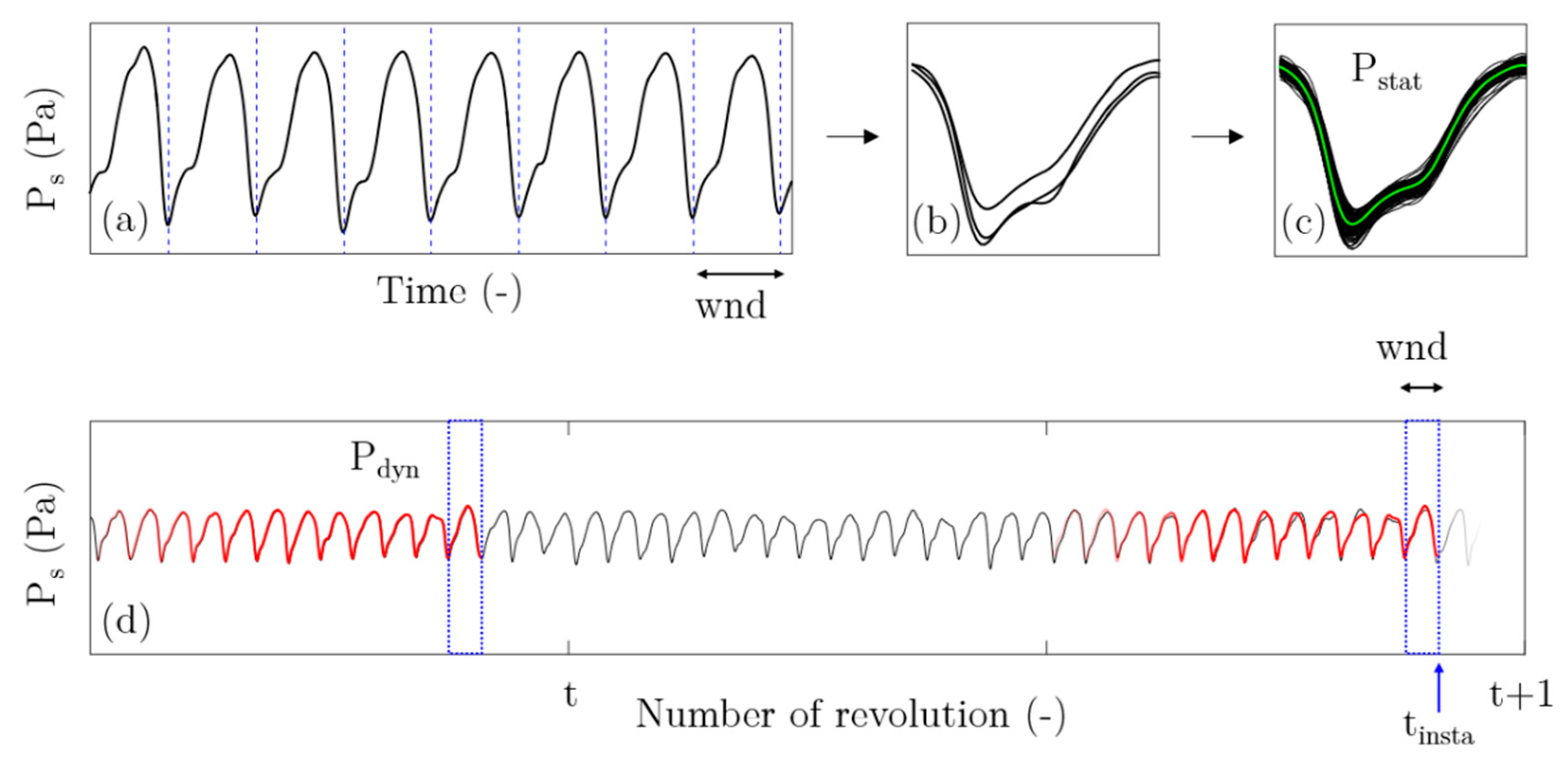
- The simplest one would be to choose a reference profile calculated by averaging several blade pressure signatures obtained from several revolutions (five, in the results presented in the paper) at a stable operating point. This reference profile will be referred to as Pstat, and is similar to the procedure used by Young et al. [13].
- The second one consists of a sliding reference profile, equal to a single passage, extracted one revolution before the one being evaluated. Unlike the latter, it is thus computed at each time step of the throttling process and evolves all along the test. This reference profile will be referred to as Pdyn and is similar to the procedure used by Christensen et al. [12] or Tahara et al. [14].
3. Results
3.1. Dynamic vs. Static Reference Profile
3.2. Comparison of Surveillance Parameters
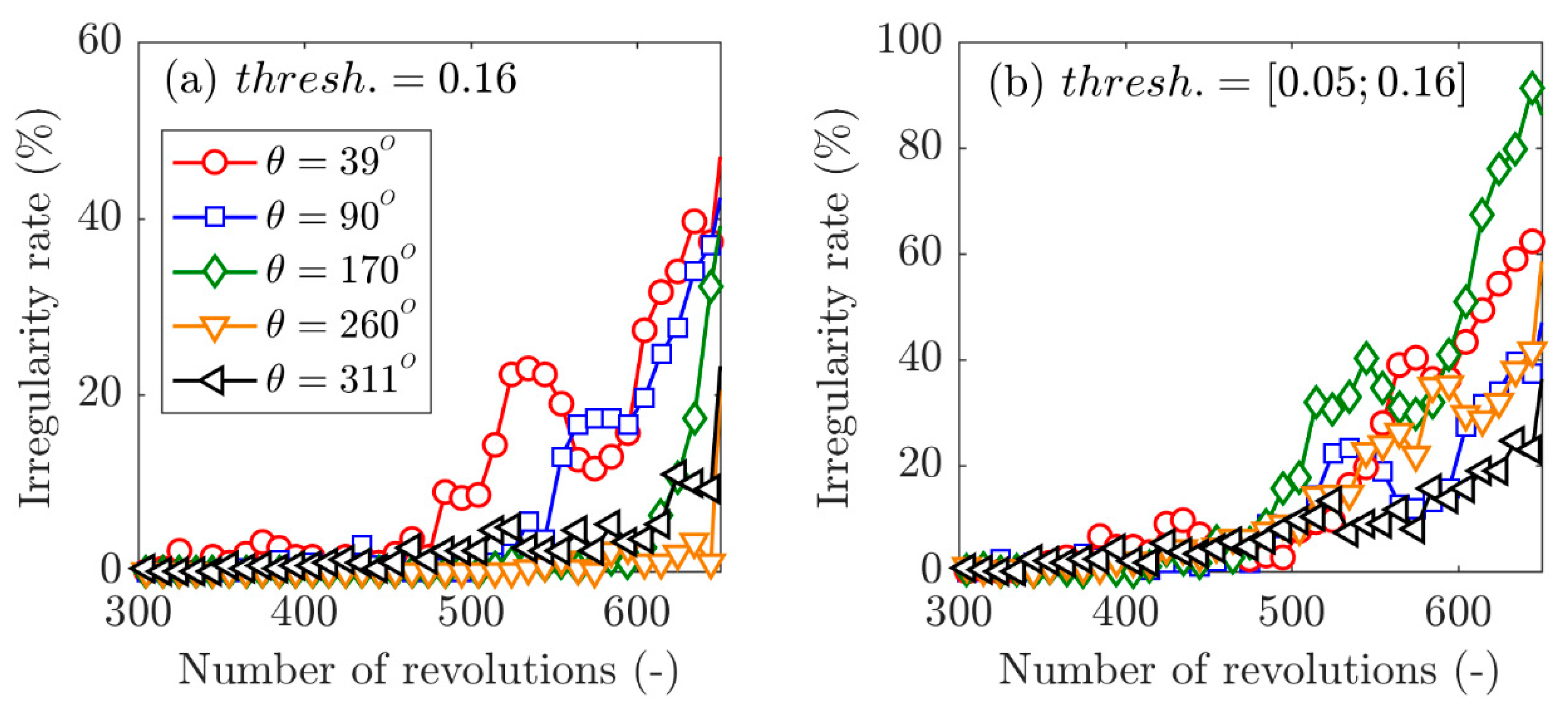
3.3. Influence of Sensor Location
3.4. Influence of the Throttling Process
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| C | Correlation |
| Cx | Blade axial chord (mm) |
| Fc | Cumulative distribution function of the Correlation |
| LE | Leading edge |
| Pdyn | Dynamic reference pressure profile |
| Pref | Reference pressure profile |
| Pstat | Static reference pressure profile |
| q | Mass flow rate (kg·s−1) |
| RMS | Root Mean Square Deviation |
| TLV | Tip Leakage Vortex |
| TRL | Technology Readiness Level |
| tthrottling | Characteristic time of the throttling process (s) |
| Umid | Mean rotor speed (m·s−1) |
| ur | Radial direction |
| ux | Axial direction |
| uθ | Tangential direction |
| Vx | Absolute axial velocity (m·s−1) |
| wnd | Analyzed temporal window duration |
| xc | Arbitrary value of the Correlation |
| Xt−s | Total-to-static quantity |
| ΔP | Pressure rise (Pa) |
| Δtalarm | Mean warning time (s) |
| ρ | Air density (kg·s−1) |
| Φ | Flow coefficient, Φ = Vx/Ut |
| Ψ | Pressure rise coefficient, Ψt−s = ΔPt−s/0.5ρUt2. |
| ω | Rotor rotational speed (r/min) |
References
- Nichelson, B.J. Early Jet Engines and the Transition from Centrifugal to Axial Compressors: A Case Study in Technological Change; University of Minnesota: Saint Paul, MN, USA, 1988. [Google Scholar]
- Day, I.J. Stall, Surge, and 75 Years of Research. J. Turbomach. 2015, 138, 011001. [Google Scholar] [CrossRef]
- Paduano, J.D.; Epstein, A.H.; Valavani, L.; Longley, J.P.; Greitzer, E.M.; Guenette, G.R. Active Control of Rotating Stall in a Low-Speed Axial Compressor. J. Turbomach. 1993, 115, 48–56. [Google Scholar] [CrossRef]
- Haynes, J.M.; Hendricks, G.J.; Epstein, A.H. Active Stabilization of Rotating Stall in a Three-Stage Axial Compressor. J. Turbomach. 1994, 116, 226–239. [Google Scholar] [CrossRef]
- Tryfonidis, M.; Etchevers, O.; Paduano, J.D.; Epstein, A.H.; Hendricks, G.J. Pre-Stall Behaviour of Several High-Speed Compressor. In Proceedings of the International Gas Turbine and Aeroengine Congress and Exposition, Orlando, FL, USA, 3–6 July 1994. [Google Scholar]
- Dhingra, M.; Neumeier, Y.; Prasad, J.V.R.; Breeze-Stringfellow, A.; Shin, H.-W.; Szucs, P.N. A Stochastic Model for a Compressor Stability Measure. J. Eng. Gas Turbines Power 2006, 129, 730–737. [Google Scholar] [CrossRef]
- Höss, B.; Leinhos, D.; Fottner, L. Stall Inception in the Compressor System of a Turbofan Engine. J. Turbomach. 2000, 122, 32–44. [Google Scholar] [CrossRef]
- Inoue, M.; Kuroumaru, M.; Iwamoto, T.; Ando, Y. Detection of a Rotating Stall Precursor in Isolated Axial Flow Compressor Rotors. J. Turbomach. 1991, 113, 281–287. [Google Scholar] [CrossRef]
- Tahara, N.; Nakajima, T.; Kurosaki, M.; Ohta, Y.; Outa, E.; Nisikawa, T. Active stall control with practicable stall prediction system using auto-correlation coefficient. In Proceedings of the 37th Joint Propulsion Conference and Exhibit, Salt Lake City, UT, USA, 8–11 July 2001; American Institute of Aeronautics and Astronautics: Salt Lake City, UT, USA, 2001. [Google Scholar]
- Dhingra, M.; Neumeier, Y.; Prasad, J.V.R.; Shin, H.-W. Stall and Surge Precursors in Axial Compressors. In Proceedings of the 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, AL, USA, 20–23 July 2003; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2003. [Google Scholar]
- Dhingra, M.; Armor, J.; Neumeier, Y.; Prasad, J.V.R. Compressor Surge: A Limit Detection and Avoidance Problem. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 5–8 August 2005; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005. [Google Scholar]
- Christensen, D.; Cantin, P.; Gutz, D.; Szucs, P.N.; Wadia, A.R.; Armor, J.; Dhingra, M.; Neumeier, Y.; Prasad, J.V.R. Development and Demonstration of a Stability Management System for Gas Turbine Engines. J. Turbomach. 2008, 130, 031011. [Google Scholar] [CrossRef]
- Young, A.M.; Day, I.J.; Pullan, G. Stall Warning by Blade Pressure Signature Analysis. J. Turbomach. 2012, 135, 011033. [Google Scholar] [CrossRef]
- Tahara, N.; Kurosaki, M.; Ohta, Y.; Outa, E.; Nakajima, T.; Nakakita, T. Early Stall Warning Technique for Axial-Flow Compressors. J. Turbomach. 2007, 129, 448. [Google Scholar] [CrossRef]
- Camp, T.R.; Day, I.J. A Study of Spike and Modal Stall Phenomena in a Low-Speed Axial Compressor. In Volume 1: Aircraft Engine; Marine; Turbomachinery; Microturbines and Small Turbomachinery; ASME: Orlando, FL, USA, 1997; Volume 120, p. V001T03A109. [Google Scholar]
- Veglio, M.; Dazin, A.; Bois, G.; Roussette, O. Pressure Measurements in an Axial Compressor: From Design Operating Conditions to Rotating Stall Inception. In Proceedings of the 49th Symposium of Applied Aerodynamics, Lille, France, 24–26 March 2014. [Google Scholar]
- Margalida, G.; Dazin, A.; Joseph, P.; Roussette, O. Detailed Pressure Measurements During the Transition to Rotating Stall in an Axial Compressor: Influence of the Throttling Process. In Proceedings of the ASME 2018 5th Joint US-European Fluids Engineering Division Summer Meeting, Montreal, QC, Canada, 15–19 July 2018; p. V001T01A001. [Google Scholar]
- Graf, M.B.; Wong, T.S.; Greitzer, E.M.; Marble, F.E.; Tan, C.S.; Shin, H.-W.; Wisler, D.C. Effects of Nonaxisymmetric Tip Clearance on Axial Compressor Performance and Stability. J. Turbomach. 1998, 120, 648. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical Parameters | Non-Dimensional Operating Parameters | ||
|---|---|---|---|
| Tip diameter | 549 mm | Inlet axial Mach number | 0.12 |
| Hub–tip ratio, LE | 0.75 | Flow coefficient, Φ | 0.44 |
| Theoretical rotor tip gap | 0.5 mm | Total-to-static pressure rise coefficient | 0.45 |
| Rotor chord | 84 mm | ||
| Rotor tip stagger angle | 54° | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY-NC-ND) license (http://creativecommons.org/licenses/by-nc-nd/4.0/).
Share and Cite
Margalida, G.; Joseph, P.; Roussette, O.; Dazin, A. Comparison and Sensibility Analysis of Warning Parameters for Rotating Stall Detection in an Axial Compressor. Int. J. Turbomach. Propuls. Power 2020, 5, 16. https://doi.org/10.3390/ijtpp5030016
Margalida G, Joseph P, Roussette O, Dazin A. Comparison and Sensibility Analysis of Warning Parameters for Rotating Stall Detection in an Axial Compressor. International Journal of Turbomachinery, Propulsion and Power. 2020; 5(3):16. https://doi.org/10.3390/ijtpp5030016
Chicago/Turabian StyleMargalida, Gabriel, Pierric Joseph, Olivier Roussette, and Antoine Dazin. 2020. "Comparison and Sensibility Analysis of Warning Parameters for Rotating Stall Detection in an Axial Compressor" International Journal of Turbomachinery, Propulsion and Power 5, no. 3: 16. https://doi.org/10.3390/ijtpp5030016
APA StyleMargalida, G., Joseph, P., Roussette, O., & Dazin, A. (2020). Comparison and Sensibility Analysis of Warning Parameters for Rotating Stall Detection in an Axial Compressor. International Journal of Turbomachinery, Propulsion and Power, 5(3), 16. https://doi.org/10.3390/ijtpp5030016