1. Introduction
Although the study of human–robot interaction (HRI) is steadily increasing, methods and approaches to HRI rarely utilize a participatory approach. Further, researchers and designers who are working with vulnerable populations need to be increasingly aware of the unique needs of their population and place ethical design (in terms of both the robot design and the research design) at the forefront of their approach. The choice of method informs the rigor of the process, but the application of the method should include meaningful engagement for participants. Many HRI studies are conducted in a laboratory setting, thus reducing their contextual validity [
1]. According to Lee et al. [
2], it is important to evaluate and develop robots in social settings due to their distinct contexts and “the design challenge is to develop procedures for creating diverse and multiple appropriate social environments” (p. 244). Thus, conducting lab-based studies greatly limits the contextual validity of the research and future robot designs.
Given the scarcity of participatory design and the limited exploration of robot design and research in the wild, it is no surprise that we continue to see an increasing number of social robots failing to meet expectations in the real world [
3,
4,
5]. In this article, we provide an overview and rationale for using a participatory approach when working with vulnerable populations in their natural settings. To do so, we present three method cases as examples of this contextually appropriate approach. Based on these cases, we also present a set of research principles for designing with vulnerable populations. We believe that, by using such methods, researchers can create a mutually beneficial relationship with participants as co-designers to create appropriate and valuable robot designs, while simultaneously maintaining an ethical and meaningful stance with the population they intend to serve.
2. Background
2.1. Teens and Stress
Adolescents are a unique and vulnerable population, negatively affected by stress and mental health issues [
6,
7,
8,
9]. Stress affects teens at school with 83 percent of teens reporting that school is a significant source of stress, and 34 percent predicting that the next school year will be even more stressful than the last [
6]. Increased stress has been shown to negatively impact learning and memory [
10]. Chronic stress is a known risk factor for numerous physical (cardiovascular, immune) and mental health (anxiety, depression) problems [
11]. The fragility of the developing brain makes adolescents especially vulnerable to chronic stress compared to adults [
9]. Currently, public schools are struggling to find ways to manage increasing stress experienced by students [
12]. Many North American teens are immersed in technology from the time they were born and are most likely to have long-lasting relationships with robotic technologies in their future work, education, and home settings. Therefore, using technology to support improvements in teen mental health seems timely and potentially impactful.
2.2. Benefits of Social Robots
Socially assistive robots present potential benefits to current society, not to replace the roles of humans, but rather to assist humans by fulfilling unmet needs [
13]. The use of social robots has been suggested as a tool to assist in both therapeutic and assessment aspects of mental health in order to address the current, unmet needs of a variety of populations [
14] including vulnerable populations [
15]. Several social robots have been developed to support emotional wellness in both children and adults. For example, Therabot [
16] is an animated dog designed to support trauma survivors by helping them to manage feelings of being overwhelmed. Paro [
17] is a plush stuffed seal specifically designed to reduce stress and stimulate interaction in seniors. Both robots have been shown to therapeutically affect emotional and physiologic responses in humans. In addition, simple robots such as Pleo (a stuffed dinosaur) [
18] and Keepon (a small birdlike robot) [
19] have been shown to have a therapeutic effect in children with autism [
15]. Therefore, the design of a mental health robot specifically for teens has the potential for great benefit and is a timely expansion of social robot technology. Project EMAR (Ecological Momentary Assessment Robot) is our interdisciplinary, human-centered design project to develop a social robot that captures stress and mood data from teens, while providing a micro-intervention in a school setting. See Björling [
20] for more detail.
2.3. Human–Robot Interaction Methods
Although a great deal of research has been conducted in the field of human–robot interaction (HRI) among children [
15,
21,
22,
23], adults [
24,
25] and seniors [
26,
27], very little is known about the relationship between teens and robots. Project EMAR is the design and development of a social robot specifically to gather stress and mood data from adolescents in the wild (within high schools) [
20]. Within the increasing number of studies of human–robot interaction (HRI), there has been a great deal of focus on physical safety [
28], teleoperation of robots [
29,
30,
31], the quality of HRI [
32], collaboration [
33,
34] and navigation [
35,
36,
37]. More recently, in relation to social robots, there has been an increasing focus on empathy [
38,
39,
40] and trust [
41,
42,
43,
44], important factors in developing a social robot. However, increasing our understanding of these important factors as they relate to HRI requires appropriate and contextually valid methods to inform research findings and robotic design.
Trust has been identified as an important component in HRI [
45], and yet common HRI research methods often include participant deception. For example, many of the implementations of the Wizard of Oz (WoZ) method [
46,
47,
48] often involve a hidden wizard who is controlling the robot for the purpose of the illusion of robot autonomy. Another common method of deception is the use of confederates [
49,
50,
51]. Although the ethical applications of robots in society is an active discussion [
52,
53,
54], the discussion of ethical methods for engaging participants in research, let alone a vulnerable population, has been minimally explored. Wundland et al. [
55] raised the issue of deception in relation to HRI studies with children suggesting that disclosure of the WoZ scenario should be disclosed after the interaction. Given the importance of trust in a social robot, we argue that the methodological approach and research methods implemented, must maintain ecological validity and transparency to ensure valid data and maintain trust when working with vulnerable populations.
2.4. Studies in the Wild: Capturing Contextual Validity
Due to our intent to help teens in real world, school settings it is imperative that we gather contextually valid data from within these environments. Therefore, all of our studies are conducted in the wild—meaning in the natural setting in which these interactions will eventually occur. In the wild studies are greatly needed in HRI in order to better understand the contextual behaviors of HRI, as these studies allow for in situ observations [
56] as well as more naturalistic interactions [
57]. In addition, HRI studies in the wild provide important findings that are so often occluded in decontextualized lab interactions [
58] and explorations of human to human interactions resulting from social robot deployment [
59]. Finally, by conducting studies in the wild, our research maintains contextual validity, and thus represents ecological validity in our data, facilitating real world generalizations.
2.5. Human-Centered Design and Participatory Design
In this section, we provide an overview of the methodology informing this project. The overall methodology for this project is human-centered design (HCD), a process to developing technologies and information [
60], and defined by ISO 9241-210:2010(E) as
“an approach to interactive systems development that aims to make systems usable and useful by focusing on the users, their needs and requirements, and by applying human factors/ergonomics, usability knowledge, and techniques. This approach enhances effectiveness and efficiency, improves human well-being, user satisfaction, accessibility and sustainability; and counteracts possible adverse effects of use on human health, safety and performance.”
Further, human-centered design is distinct from user-centered design [
61,
62] and has a philosophical commitment to upholding human dignity and human rights [
63,
64]. HCD using a participatory approach is an appropriate way to engage vulnerable or marginalized populations [
61] and often methods need to be modified or adjusted to account for the needs of these populations [
65].
While HCD is still rare in the design and development of robots, it is a successful methodology for working with teens [
66,
67,
68]. A key component of HCD is that it engages people throughout the design process. However, how people are engaged in the design process can vary [
62]. In this project, we used a participatory design (PD) approach because the people who are “destined to use the system play a critical role in designing it” (p.xi) [
69]. PD is an appropriate approach for designing social robots with teens due to its political commitments and meaningful engagement of people in the design process. In PD, the goal is not to just understand people and their knowledge to build systems for them, but rather to design co-operative and collaborative design relationships that can empower users and make practical or political improvements in people lives [
70]. According to Spinuzzi, methods used in participatory design are “always used to iteratively construct the emerging design, which itself simultaneously constitutes and elicits the research results as co-interpreted by the designer-researchers and the participants who will use the design” [
70].
Other projects using PD to consider social robots emphasize its ability to imagine and develop a solution from the ground up by starting with a community or specific group’s needs and concerns rather than examining existing robots and gathering feedback [
71]. Further, PD invites participants to reflect upon and communicate about “their lifeworlds through their design” [
71,
72]. Further, participatory design can facilitate, what DiSalvo et al. referred to as “critical engagements”, where people can reveal or question existing beliefs about technology, and “creative expressions of issues”, which are new and imaginative ways to think about a problem or solution [
72].
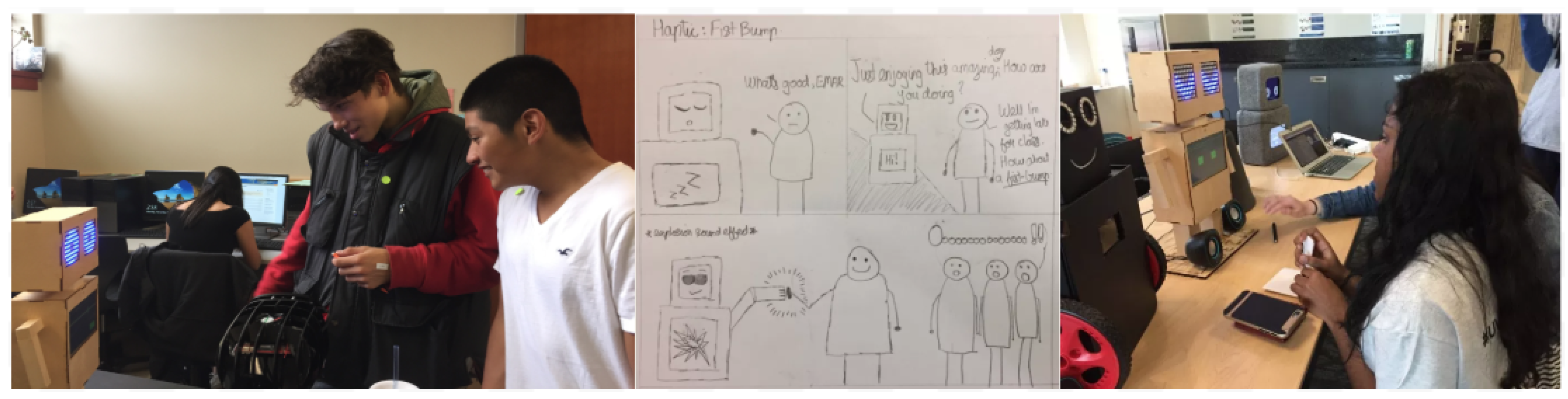
In our design process, we invited teen participants to take part in all of our research activities where they provided ideas on how the robot should look, behave, interact, and move (see
Figure 1). Teens even participated by designing their own prototypes and features. They also participated by taking the role of researcher, gathering data from their peers, writing study scripts, manipulating robots during sessions, and discussing their ideas and opinions. In doing so, we leveraged their unique creative abilities and centered their engagement in the process of everything we do. Successful design of a social robot specifically for teens requires not only an intentional and contextually appropriate design, but also appropriate and transparent methods by which to engage teens in the process.
3. Participatory Method Cases
The following method cases illustrate our use of participatory design in the wild. Within our methods, we carried out our research to ensure ethical, meaningful, and rigorous interactions. Methods were constructed with the contextual environment in mind, and thus allowed for flexibility to “iterate on the fly” when necessary in the field. Our methods were also focused on keeping teens central to the process. This does not just mean capturing data as teens engage as participants in the research, but also engaging teens as actors and operators in conducting the method itself. Whenever possible, researchers took the role of instigator and facilitator, but allowed teens to play all roles during interaction, as is illustrated below. Through the development and implementation of this research, a set of research principles emerged that now guide our work.
3.1. Methods Case 1: Design Sessions with Teens—Envisioning Robots
Unlike other robot projects that begin with working prototypes or existing robots, our approach (similar to [
71]) was to start from the very beginning and ask teens to envision their idea of what a social robot to address teen stress would look like. Therefore, we engaged teens in a series of design sessions to envision robots through sketching, storyboarding, and scenario writing in the ideation stage.
3.1.1. Ideation and Iteration
To explore possible ideas for a robot design, we engaged participants in a drawing activity that acted as a modified form of the future workshop [
73] from participatory design. The goal of the activity was to have students envision what a robot, which was designed specifically for their school, might look like. Participants were given a blank piece of paper and asked to draw an image of a robot. After drawing the image, participants were then asked to share their drawing with the rest of a group of teens and describe their robot. The drawings and articulated rationale for the design were then collected and analyzed to inform the robot EMAR’s design requirements, principles, and rationale. For example, almost all teens’ robot designs illustrated the robot as a helper, supporting students at school and in ways students felt were appropriate.
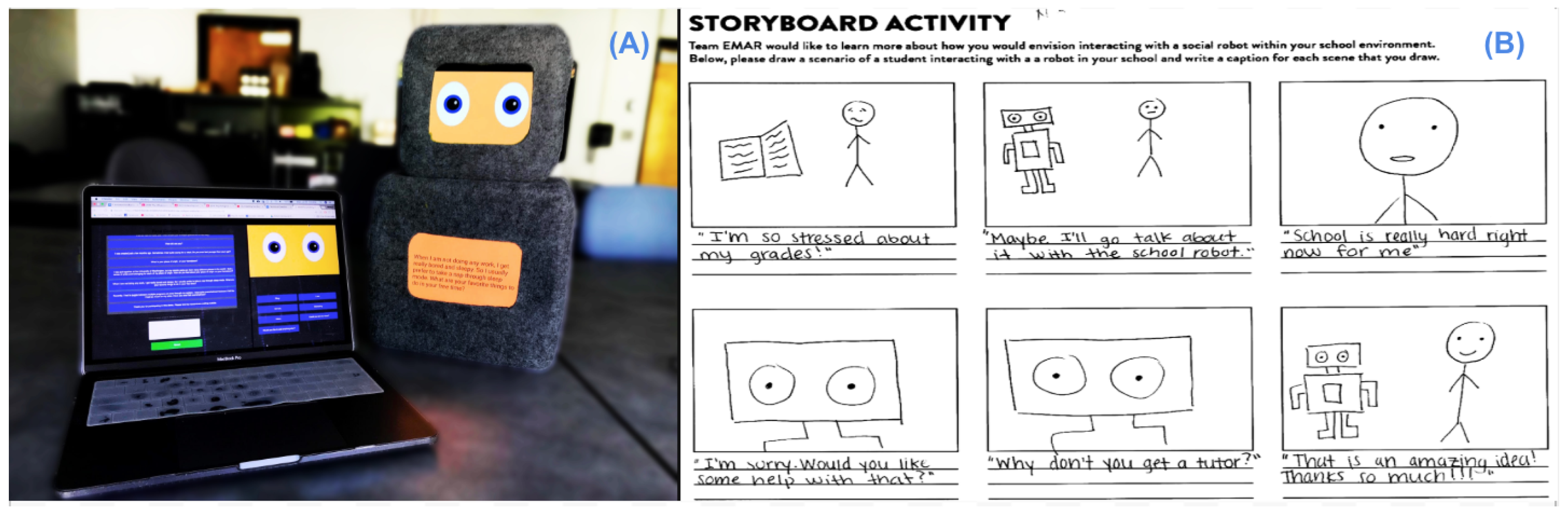
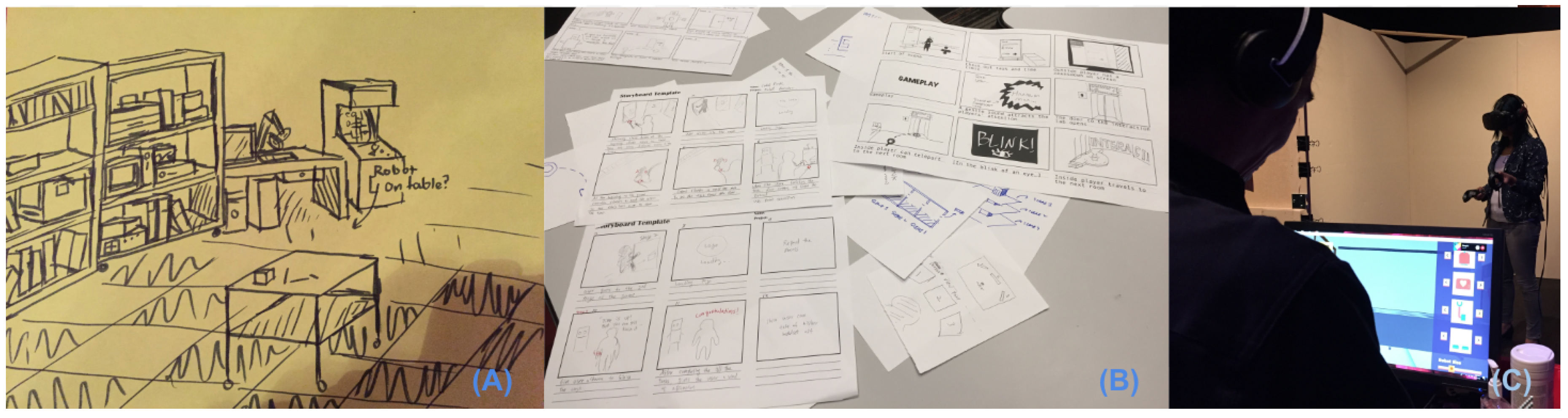
Beyond these early sessions, each subsequent interaction with groups of teens have included some form of ideation. After a prototype was developed, teens helped to ideate and iterate on a rendered robot face. In an effort to give teens control over the robot appearance, we developed an easy to use, web-based face editor, that allowed teens to customize a face given a particular context or role. See
Figure 2A for an example. Later in the project, as we began to develop the functionality of EMAR, we engaged teens in ideation and iteration of the user-interface (UI) design to ensure teens felt the navigation and interaction was feasible.
3.1.2. Collaborative Storyboarding
To further understand appropriate behaviors of a social robot for teens, we asked pairs of teens to storyboard a scenario in which a robot is interacting with a student in their school. In user experience design, professionals use a variety of visual tools and techniques for storytelling [
74] including sketching and using storyboards [
75] and comics [
76]. These techniques are ways to envision and communicate designs and ideas for a broader audience. After participants completed their drawings, they were asked to articulate to the larger group what the robot was doing and why. This exercise was designed to invite teens to consider the specific context and constraints of their own schools and how an imagined robot might exist in this specific environment. By making it a collaborative method, we increased engagement by adding a social component. In addition, the collaboration allowed for interesting discussion during design, and thereby rich qualitative data. For example, during storyboarding, teens often discussed the roles of their robots, the acceptable robot behaviors, as well as ways in which they felt the robots could be helpful to teens. Some teens even began the process of problem-solving real world barriers, such as how the robot could navigate crowded hallways and manage communication during group interactions. During storyboarding, all conversations among pairs were captured as data in addition to the storyboard data itself.
3.1.3. Outcomes
The methods for design sessions with teens maintain our participatory research principles of keeping teens central to the process, maintaining contextual validity in both content and environment, and by creating activities that are engaging and active for teens. The rich data that emerged during these activities are often qualitative in nature and extremely valuable to inform the design of the robot.
3.2. Methods Case 2: Social Robot Design Challenge
Within human-centered design, it is common to include people in design through research methods and evaluation of products [
77]. In a participatory approach, end users are engaged meaningfully throughout the design process by having a metaphorical seat at the design table and working closely on the initial ideas and vision for a product or system. To engage teens as meaningful collaborators in the design process, we developed a novel approach for engaging them in a participatory way in the form of a Social Robot Design Challenge.
3.2.1. The Robot Competition, a Familiar Genre
Robot competition, where robotics teams work on a mechanical prototype and then present the prototypes in a competition designed to highlight their mechanical properties and functionality, are common in the United States at the university [
78] and high school levels [
79]. Participating in such a robotics challenge has a variety of benefits including increasing learning about robotics and positive attitudes toward robotics and engineering [
80] as well as toward science in general [
81]. Given these benefits and the familiar genre, we created a similar design challenge. Ours was unique because it focused on the use case of a social robot to help teens with stress. Engaging teens in the process of designing the robots informed the design requirements for Project EMAR. Further, because school is the place where teens spend a considerable amount of their time and is often a main source of stress, having teens working on design ideas while at school helped inform that their designs were ecologically sound, informed by their environment, and take into account the unique constraints of each school environment.
3.2.2. Participatory Design at Scale
A limitation of participatory design is that is it can be time intensive and often only involve a small group of people in the design process [
60]. From previous research [
82], we knew that each school environment and community is unique and therefore may have different requirements for a social robot. To strive for a variety of schools in our region, we recruited broadly and partnered with seven urban high schools spanning two cities. We recruited schools to gain a range of representation based on demographics, location, and interests. Each school hosted our research team for multiple visits where we mentored teens in the human-centered design process. Our protocol for working with teens was designed to be flexible to accommodate each school’s interests and availability. In some schools, we visited classes and worked directly with teachers and their students. In others, we engaged with teens after school with extra-curricular clubs.
3.2.3. Providing a Foundation of Human-Centered Design
Visits to each school were structured around the five stages of human-centered design: research, ideation, prototyping, testing and iteration. During each stage, we presented short explanatory videos about human-centered design [
83] that had been specifically designed for teens [
84] and a series of relevant exercises to scaffold the material. While the information in each lesson was similar, the content was geared and adapted for the individual group based on collaboration with teachers and advisers and the teens themselves.
In the research stage, teens were asked to gain a better understanding about teens and stress through a variety of activities in the human-centered design process. Different groups of teens chose to enact different research methods, including interviewing their peers, conducting surveys of their peers either on paper or online, or interviewing experts at their schools such as advisers or counselors. Some groups collected feedback from peers by posting a board where teens could contribute their ideas anonymously about what calmed them and what stressed them out.
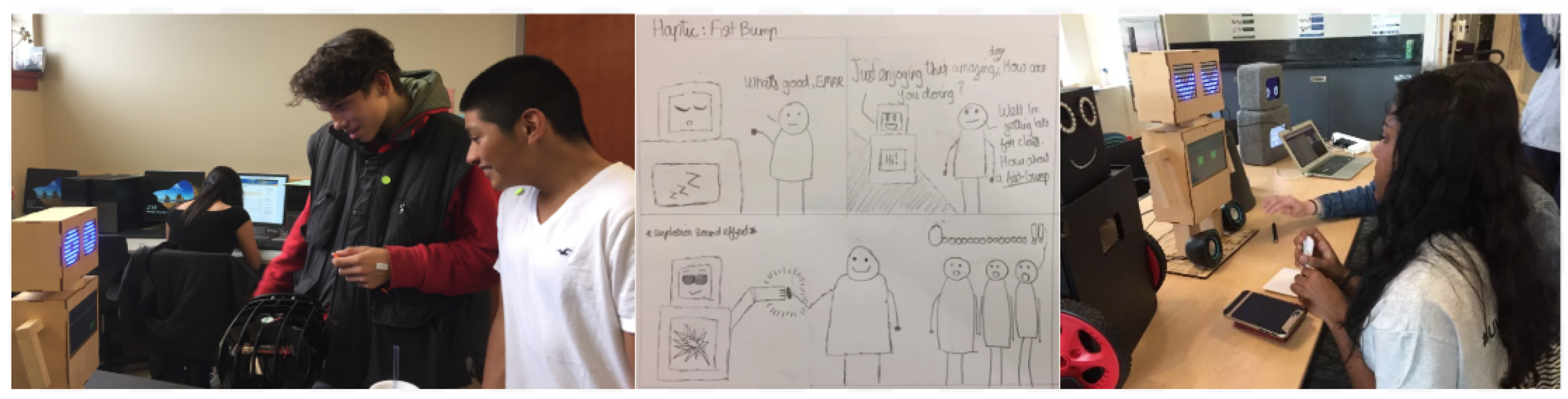
During the ideation stage, teens brought back ideas from the research and in conversation with their own personal reflections on stress, brainstormed different ideas for what a social robot would do, what features it would have, what some of the constraints are related to robots in their particular school. To capture their ideas, they created sketches, storyboards, and scenarios. See
Figure 3.
In the prototyping stage, teens spent time creating physical prototypes from a variety of materials including cardboard, soft materials, hardware, paper, and so on. In this phase, teens worked to approximate both the design and the functionality of their robot ideas. They discussed interfaces, how the robot would received information and communicate. They approximated mobility through the use of wheels, created mock ups of interfaces including using white boards for screens.
During testing, teens invited their peers to interact with their robots. To explore the robot functionality, the teens controlled their robotic prototypes by using Wizard of Oz methods [
46,
47,
48], and informal usability testing [
85,
86], and also solicited feedback and opinions form their peers through group discussion. As a result, the groups of teens iterated on their designs based on the feedback from peers, at times modifying ideas and others adding new features.
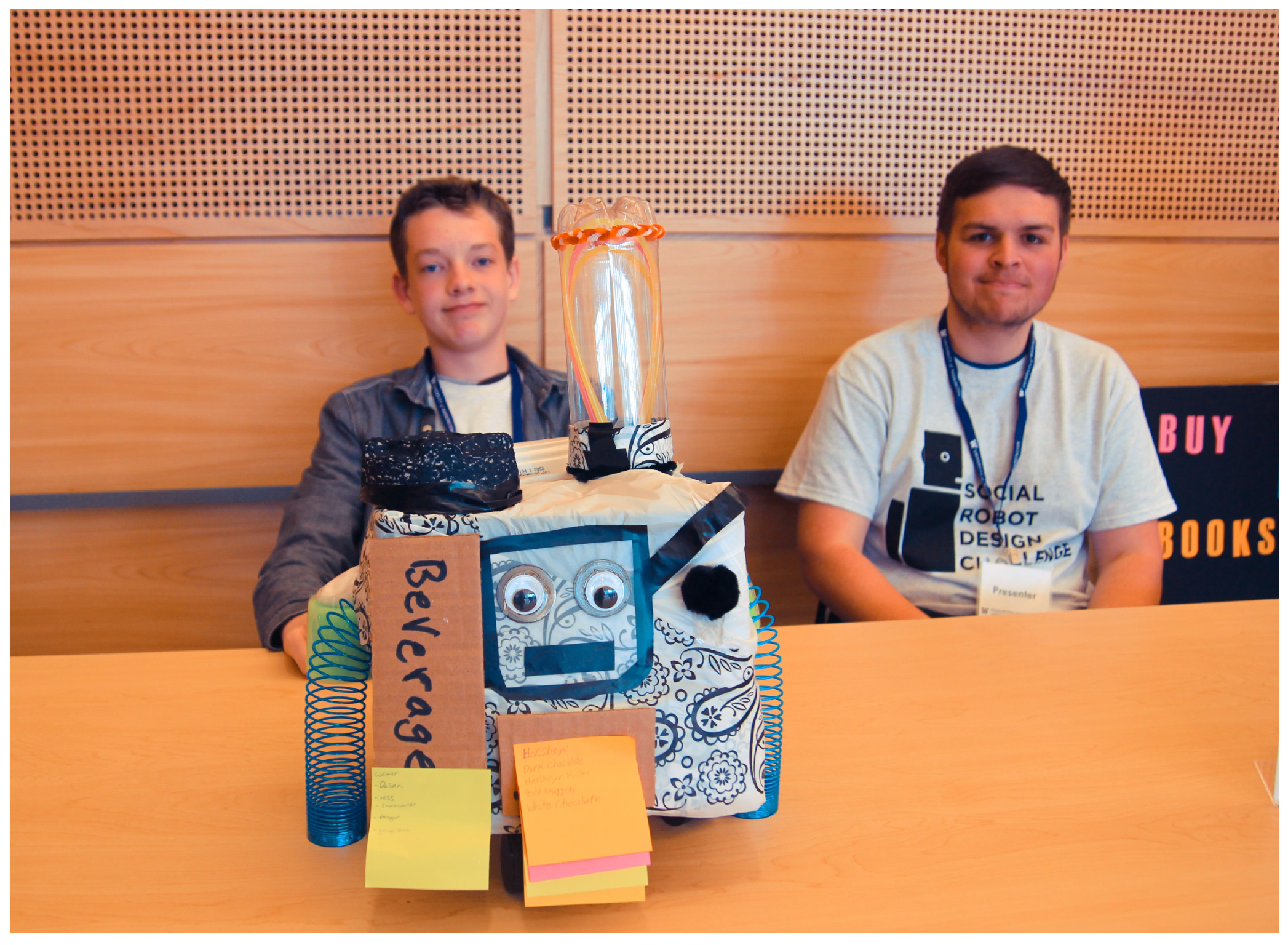
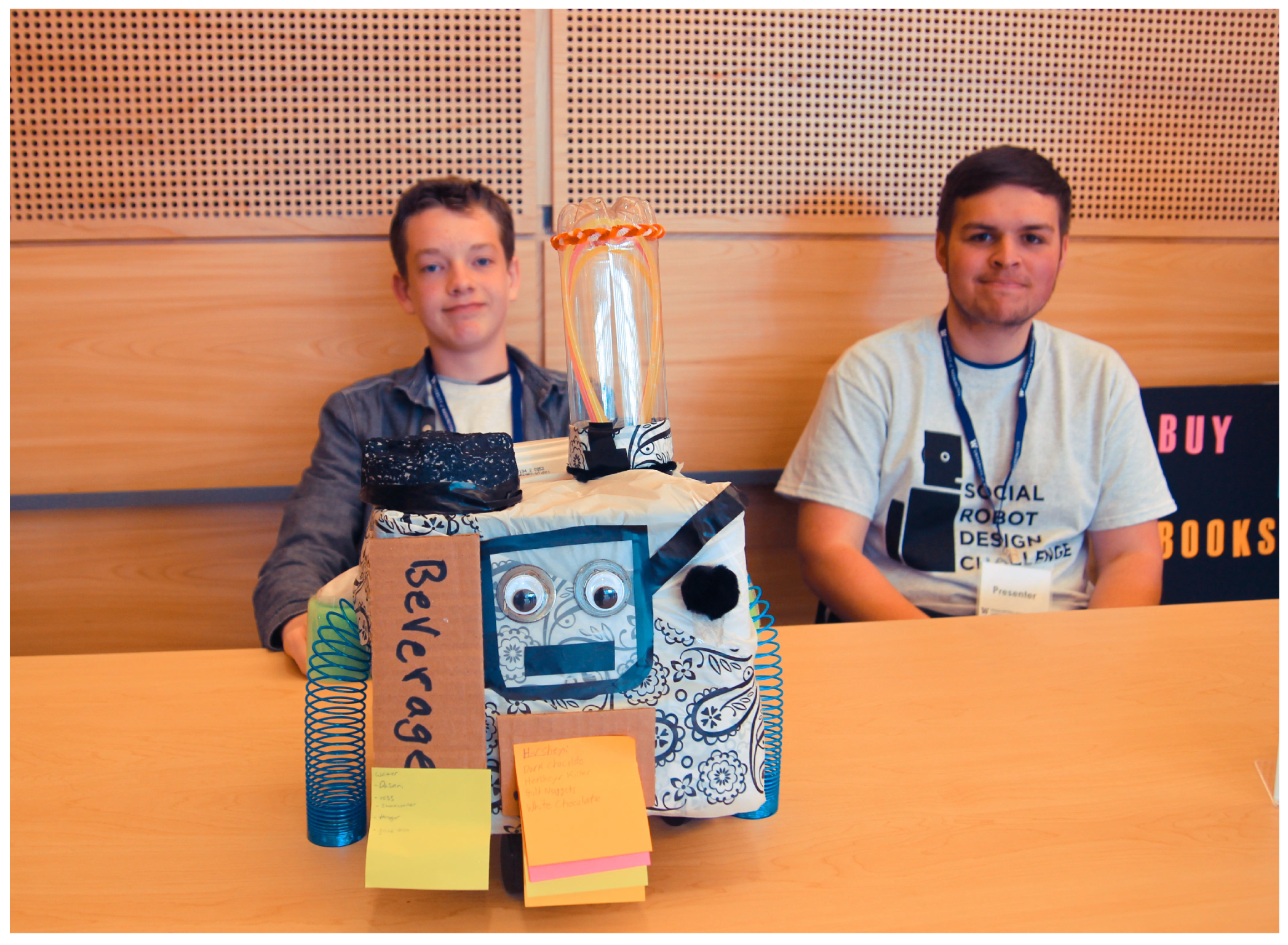
3.2.4. Showcasing the Teen’s Prototypes
As a culminating event for the social robot design challenge, we invited the schools who had created robots to attend a Social Robot Design Challenge Showcase, which was hosted on our university’s campus and was open to the public. Six of the seven participating schools attended and each team presented their robot designs to a team of experts in social robotics, including researchers from academia and industry. Each team presented their design that included a description of the features of their robots and a rationale for why they designed the robot the way they did (
Figure 4). They also prepared and screened a presentation video that documented their design and rationale. Each team answered questions from the expert judges, other teens, and the general public.
3.2.5. Outcomes
The goal of The Social Robot Design Challenge was to invite teens to be the designers and co-creators of social robots. This method case had positive outcomes for both the participants and our research project. The schools, teens, and teachers who participated in the challenge mentioned that, overall, it had been a positive learning experience for the students who participated. Each school voiced interest in being engaged in future challenges. For our research team, the designs that the teens created and their rationale for their design decisions continue to be a significant source of information for our project informing key features of Project EMAR. For example, a theme that crossed all the robots designed by teens was the concept of reciprocity, meaning that teens expected the robot to provide support, comfort, or distraction during an interaction. The prototypes created by teens provided insight into how they anticipate the robot to look, act, and even feel.
The success of the Social Robot Design Challenge and the richness of the data collected can be attributed to several of our decisions in how to implement the method. First, creating actual designs placed the teens in the role of key contributors and designers. While we as researchers provided support to teens to teach them about human-centered designs, they ultimately decided what features to incorporate, how the robots should look and act, and how to make iterations and changes based on feedback from their peers. Respecting teens’ perspectives and honoring their expertise about their lives ensures the designs are an authentic interpretation of teens’ needs, rather than assumptions from adult designers. Second, conducting this research within the school environment, rather than in a lab or at our University, provided contextual validity in which teens took into account the constraints and the experience around them, rather for designing in the abstract. Third, conducting this research across seven different school settings, required us to bring a flexible approach to the design challenge. We gave teens similar tools, experiences, and instruction, but encouraged each school and group of teens to participate in a way that would encourage their unique perspectives and contexts to inform the design experience. In this way, we were able to provide similar materials to each school, but in a way that was flexible and adaptable to enable each team to follow their own path and develop a design that was suitable for their community.
3.3. Methods Case 3: Wizards, Witnesses and Collaborators
Beliefs and speculation about robots do not always inform behavior. In addition, studies utilizing simple images or videos of robots capture the significant effect of robot embodied presence that occurs when interacting with a physically present robot [
87,
88,
89]. Therefore, interaction studies, with physically embodied, and present robots, are ideal to capture valid teen-robot interactions. In our interaction studies, we also utilize the social nature of teens in order to increase engagement. The use of theatrical role play as a participatory method has been shown successful even with vulnerable teens [
90,
91]. Therefore, to make a teen–robot interaction study more realistic, we crafted a role play scenario [
92] in which teens would tell their story of stress to the robot.
3.4. Script Writing
Wanting to keep our role-play scenario realistic, but reduce the pressure on teens to perform or share personal data in front of their peers, we gave them the option to read a stress story script, which we crafted based upon qualitative data from teens about their stressors. However, the first time we presented this script, a few teens immediately commented in writing on the script that they found this script was “insulting” and “fake.” Although based in teen data, our script did not meet the teens’ need for an authentic story during role play and interaction. This sparked the idea to have teens craft the scripts themselves in order to create an more authentic interaction with the robot. We asked teens in groups of two, to craft a story of stress that they or a friend had experienced. We invited them to to write the story as they would to share with someone else. The teens (n = 39) crafted their stories and we chose three diverse options (one about a physical injury, one about applying to colleges, and one about a problem with a teacher) to use in future interaction studies. Given that trust is an important principle in participatory research, we responded immediately to iterate upon our original scripts, to ensure teens felt the interaction was more authentic and true to their experience.
3.4.1. Teleoperation of Robotic Devices
Teleoperation is commonly done by researchers during HRI [
93,
94,
95]. The deception of participants is also common [
46,
47,
48], in the Wizard of Oz technique (e.g. [
46]) which involves controlling a robotic device from behind a screen or barrier to create the illusion of autonomous robot functions and capabilities. When working with teens, authenticity is important and a key component to trust, therefore we did not use deception in any capacity. Instead, we exposed all of the workings of our robot prototypes to teens as part of our introduction to the project. This educational outreach ideally builds robotics literacy while inviting trust and transparency with our participants. After understanding the devices and how they are operated, we then engaged in the teens in our HRI studies, often including the operation of the robot.
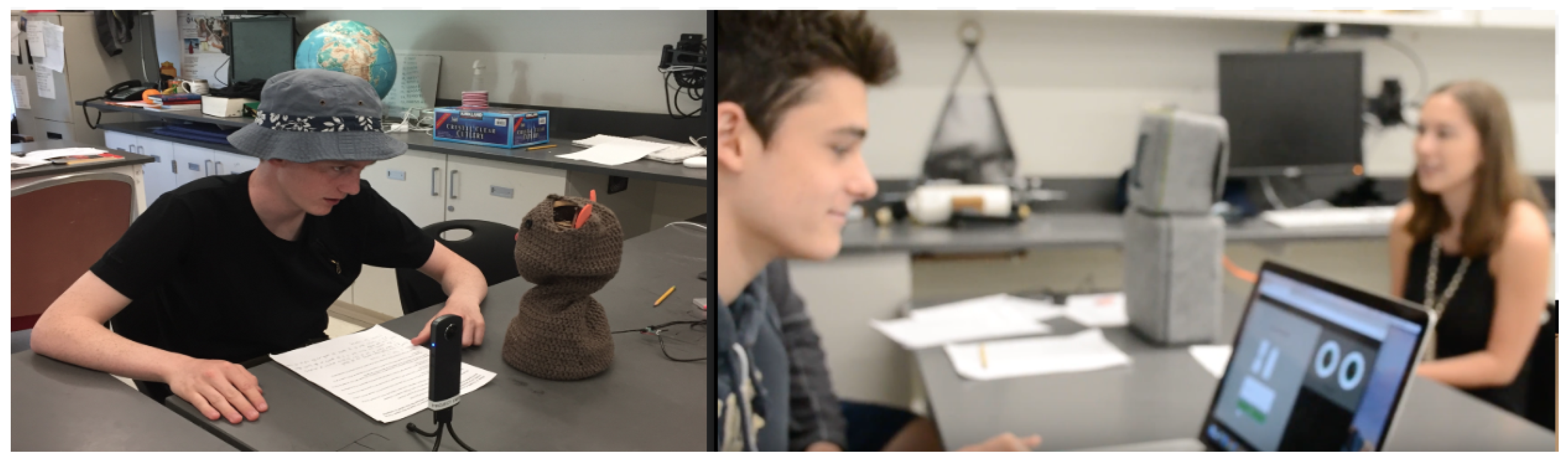
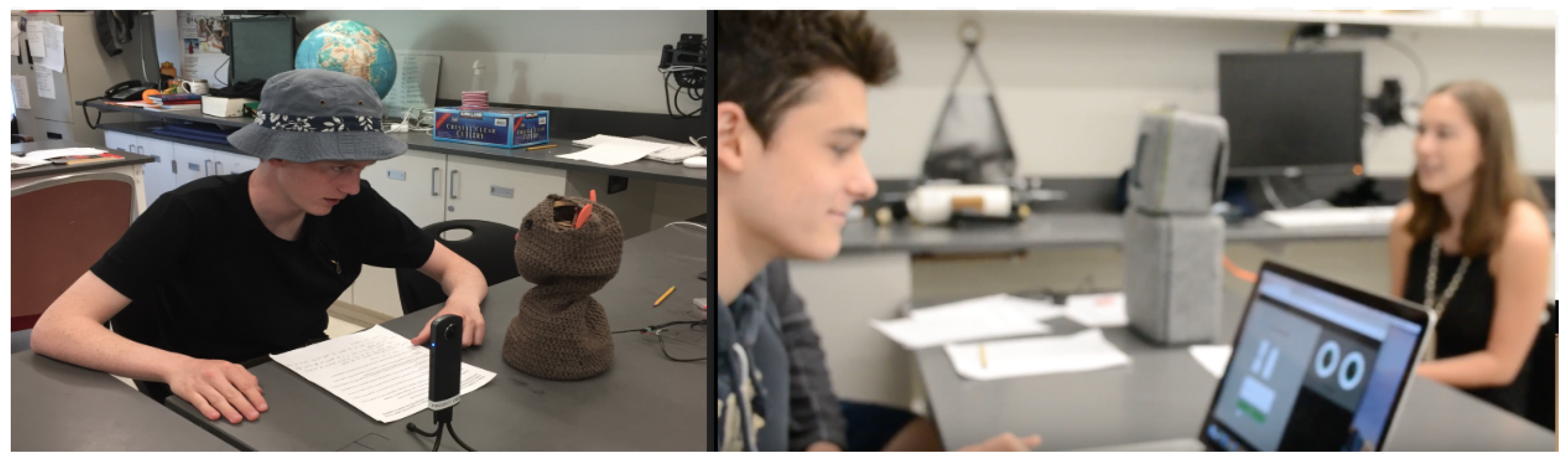
For example, in order to better understand the importance of movement and voice in teen–robot interactions, we conducted a study of two distinct robot prototypes. One was Blossom, a soft bodied, flexible robot with a crocheted outer shell [
96] (
Figure 5, left). Blossom was teleoperated using a smartphone as a gyroscope by a teen. The second prototype was Teen-Health-Bot [pseudonym] Version 4, a soft, but boxy robot with a rendered face on a tablet and a belly tablet displaying text (
Figure 5, right). V4 also uses a robotic voice to communicate. Teens operated each devices in response to a prompt to express empathy toward a teen sharing a stressful experience. Using the stress story scripts written previously by teens, one teen read the script, while the operator (using only movement, or typing a verbal response) responded. In addition to the script reader and the teleoperator, two other teens acted as witnesses to the interaction. All teens then responded to a brief survey about how they rated the robot’s response to the teen and how they felt operating the robotic device.
In addition to the script reader and the teleoperator, the teen witnesses in the process are important in two ways. First, they add the social context that will inevitably be part of the environment in which the robot will eventually live. Teens will be interacting with the robot while other teens are nearby, in a public space such as a hallway, or lunchroom. Thus, piloting this more social interaction early on in the robot design is important. Second, as witnesses, the teens can observe the full interaction, not being caught up in the script reading activity or the teleoperation, and therefore can focus on the interaction itself and provide valuable, observational input. In addition to the survey information, after engaging in the activity, teens also debriefed in a group interview about how they felt about the robot and this type of interaction. This qualitative, contextual data, post-interaction has provided valuable input informing our design of EMAR, but also insights into how teens feel about robot interaction.
3.4.2. Teleoperation and Collaboration in Virtual Reality
Exploring robot interactions in the wild can be cumbersome and costly. In addition, exploring design embodiment and a wide range of interaction behaviors is greatly limited by real world materials and expense. Therefore, we found that, as a platform, virtual reality (VR) provides a solution to rapid, collaborative prototyping not only for robot form factors and behaviors, but to pilot human–robot interactions as well, all while maintaining contextual validity through an immersive “school” environment. VR also provides a unique opportunity to immerse teens into what feel like contextually appropriate settings for teen–robot interactions (classroom, lunchroom, and hallways), thereby avoiding the pitfalls of a lab setting studies. In addition, by designing a virtual reality platform to elicit collaboration and conversation, our pilot HRI studies in VR allow for easy and natural conversation, and, thus, data collection.
Our exploration of VR began during discussions of appropriate robot size and behavior related to teen preference and in terms of durability for a public high school setting. VR allowed us to begin exploring size and behavior prototypes, prior to costly building in the physical world. However, as we began to design a collaborative VR game for teens, we quickly recognized the huge potential for VR to provide: (1) rich research data through conversation; (2) unconstrained co-design sessions; and (3) unique opportunities for teens to explore HRI.
In user research, often the think-aloud protocol [
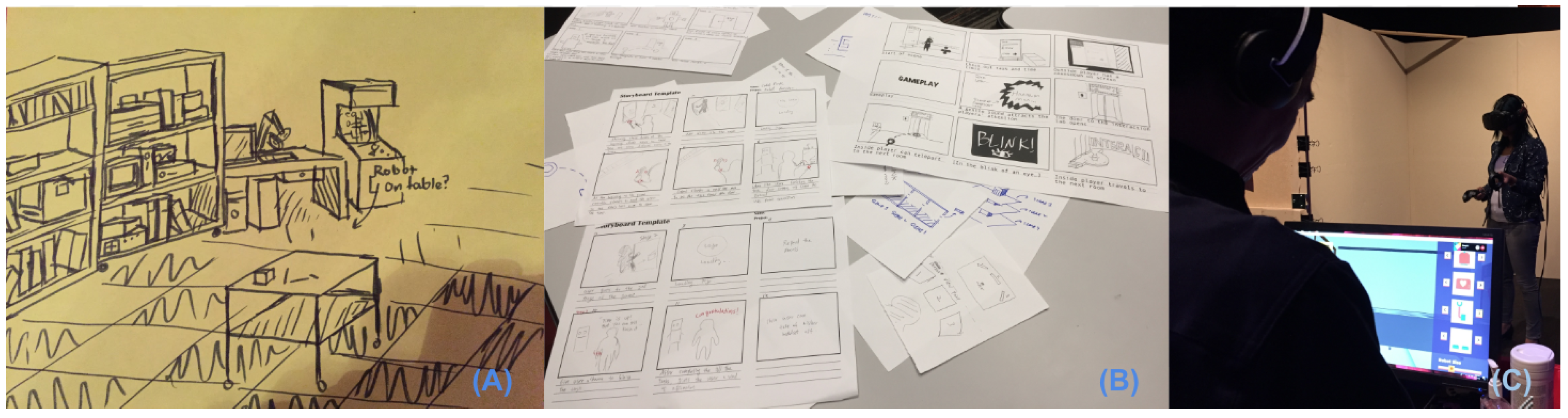
97] is a technique to understand a the experience of a user as they go about a task. We wanted to understand choice and decision-making as teens selected and assembled robots, knowing that talking aloud is not comfortable for teens (from previous field work). Therefore, we created a collaborative game that required talking between teens in order to succeed. To do this, we developed an asymmetric VR game design [
98], meaning one player is outside of VR, operating a computer with a headset and microphone, allowing them to connect to the other player who is inside immersive VR. Together, the teens collaborated (each had different abilities) to agree upon and assemble a robot together. Once assembled, the teens were invited to engage in an interaction with the newly developed robot. The outside player could teleoperate the robot while interacting with the in-VR teen, providing rich interaction data. Like all of our interaction studies, We conducted these VR robot interaction sessions at school by setting up VR equipment in libraries and classrooms. Teens engaged easily and eagerly with the VR platform and reported that they found both the internal and external roles fun. Most importantly, we were able to capture valuable data, through gameplay recordings about how teens collaborate as well as insights into the teens’ perceptions of robot roles and behaviors. See
Figure 6 for examples of the teen’s sketches and gameplay.
3.4.3. Outcomes
From the use of methods designed to engage teens as actors, including teleoperators, in human–robot interaction, we maintained our participatory research principle of engagement, keeping teens central to the process. By designing the VR environment in a school setting and by conducting the VR interaction at a school, allowed us to maintain the contextual validity in both content and environment. The rich data that emerged during these activities are often qualitative in nature, but extremely valuable to inform the design of the robot EMAR, not to mention to better understand the needs and beliefs of our population of teens.
4. Discussion
Utilizing participatory methods in the wild to engage teens in the co-design of a social robot has been both productive for the project and imperative for creating meaningful long term relationships with our teen participants. By conducting studies in the wild, we captured interaction data that were contextually appropriate and valid to further inform the design of the the robot EMAR. In addition, by being fully transparent in our methods, we worked to maintain trust and engagement with our vulnerable and often skeptical users—teens. By engaging in these methods over time, we established trust with our participants and their communities. Based on the three methods cases described in the previous section, we reflected on our approach to develop a set of research principles that guide our efforts to engage vulnerable populations in the participatory design of social robots. While these principles specifically guided our approach, we believe they may be applicable to other design projects and research domains.
4.1. Participatory Research Principles
The following participatory research principles were developed based on reflection of our past three years of working with teens. These principles are evident in the three methods cases presented and continue to guide our work with teens.
Contextual Validity: All research and design is conducted in the wild where the eventual robot will reside.
Participant-Centered: All of our methods allow for teens to be the experts in their own lives, and the voices to articulate their own needs. The research teams preferences, or personal experience, never overrides the data we gather from teens.
Collaboration: Engaging teens in collaborative tasks by working in pairs or groups leads to rich and powerful data, while supporting their desire to be social. Whenever possible, we invite teens to work in pairs or groups rather than individually.
Engaging and Active: All of our methods are engaging and allow for teens to be active participants. Teens are the actors as well as participants in the research, and, when possible, they are the only actors engaging in the process.
Researcher Flexibility: Given that research takes place in the wild, methods must be flexible to accommodate the many unexpected variables and situations that occur in the school environment.
Trust and Transparency: Each research or design activity is constructed in such a way that researchers are fully transparent about the agenda, research questions, and goals. Deception is never used in design or research activities. The use of confederates (actors posing as participants) or typical Wizard of Oz methods (the illusion of an autonomous robot that is actually being operated in real time) are never used with teens.
4.2. Designing for Trust
As mentioned in the Introduction, many of the common research methods in human-robot interaction include deception. However, working with a vulnerable population requires trust and authenticity in order to maintain community relationships. Therefore, deception could be destructive in participatory research. Fortunately, the methodology behind participatory research encompasses the necessity of trust [
99,
100]. Although there are important ethical discussions regarding the use of deception in social robotics research [
101] even in studies of children [
55], it is necessary to move from discussion to application. For this reason, we believe utilizing a participatory approach, along with specific research principles guided by creating trust, is essential to not only ethical engagement, but also rich, contextual data from participants.
5. Challenges and Limitations
While the methods employed in this project have helped our team develop and articulate these guiding principles that are providing benefits for the project and our research participants, these methods and associated principles have challenges and limitation associated with them. First, as is often true in participatory research, the process of creating relationships with stakeholders and users can be time consuming. Second, conducting studies in the wild provides huge benefits for contextual validity, but also allows for an unlimited number of uncontrollable situations. Maintaining flexibility within design can be helpful, but even then there is still potential for studies to fail in the wild. Finally, although often much appreciated, communicating and disseminating new, participatory iterations of commonly used methods to an engineering community can be difficult and time intensive.
6. Conclusions
As interest in human–robot interactions increases, paying attention to how and why researchers are choosing methods is integral to determining the validity of that data. The choice of methods informs the rigor of the process, but the application of these methods must include meaningful and ethical engagement for participants. Thoughtful attention to methods is especially crucial for work with teens who are a unique and vulnerable population.
Developing and articulating these participatory research principles benefits our research project and also our participants. The principles have emerged over three years of research and now guide our decisions and directions in ongoing efforts. Having the principles clearly articulated helps communicate to new research team members and our stakeholders how and why we conduct our participatory research in the way that we do. It also acts as a guideline for developing new research activities or engaging new partners. Further, having a clear set of guidelines helps our team articulate our approach and its rationale to participants to more fully engage them in the reasons and purpose of our research.
These guidelines provide our team with confidence that we are engaging teens in a thoughtful, ethical, and appropriate way. The approaches help gather data that are useful, meaningful and valid given the contextual validity inherent in these participatory methods. Given the vastness of potential human–robot interaction studies, we advocate that participatory methods be used, especially with vulnerable populations. In addition, we recommend that research teams may benefit from the development of their own set of participatory research principles that maintain consistency within their research and provide an ethical and transparent rationale for the research.
Author Contributions
This paper was conceptualized by the first author and all other work, methodology, investigation, organization, and writing was done equally by both authors.
Funding
This research was funded in part by the National Science Foundation’s National Robotics Initiative grant No. NRI:INT 1734100.
Acknowledgments
We would like to acknowledge the very important work of our teen collaborators and their schools. This work would not be possible without teens engaging in co-design and helping us to envision our future robot.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jung, M.; Hinds, P. Robots in the Wild: A Time for More Robust Theories of Human-Robot Interaction. ACM Trans. Hum.-Robot Interact. (THRI) 2018, 7, 2. [Google Scholar]
- Lee, H.R.; Šabanović, S.; Chang, W.L.; Nagata, S.; Piatt, J.; Bennett, C.; Hakken, D. Steps toward participatory design of social robots: mutual learning with older adults with depression. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 244–253. [Google Scholar]
- Jibo Social Robot: Where Things Went Wrong. Available online: https://www.therobotreport.com/jibo-social-robot-analyzing-what-went-wrong/ (accessed on 13 December 2018).
- The Adorable Kuri Robot Has Been Canceled—The Verge. Available online: https://www.theverge.com/circuitbreaker/2018/7/25/17613240/kuri-robot-pause-refund-mayfield-robotics (accessed on 13 December 2018).
- Sony Halts Support for Aibo, Still One of the Best Robot Toys Ever—IEEE Spectrum. Available online: https://spectrum.ieee.org/automaton/robotics/home-robots/sony-halts-support-for-aibo-still-one-of-the-best-robot-toys-ever (accessed on 13 December 2018).
- American Psychological Association. Stress in America 2013 Highlights: Are Teens Adopting Adults’ Stress Habits. Available online: https://www.apa.org/news/press/releases/stress/2013/highlights.aspx (accessed on 13 December 2018).
- Hamilton, J.L.; Stange, J.P.; Abramson, L.Y.; Alloy, L.B. Stress and the development of cognitive vulnerabilities to depression explain sex differences in depressive symptoms during adolescence. Clin. Psychol. Sci. 2015, 3, 702–714. [Google Scholar] [CrossRef] [PubMed]
- Leonard, N.R.; Gwadz, M.V.; Ritchie, A.; Linick, J.L.; Cleland, C.M.; Elliott, L.; Grethel, M. A multi-method exploratory study of stress, coping, and substance use among high school youth in private schools. Front. Psychol. 2015, 6, 1028. [Google Scholar] [CrossRef] [PubMed]
- Eiland, L.; Romeo, R.D. Stress and the developing adolescent brain. Neuroscience 2013, 249, 162–171. [Google Scholar] [CrossRef] [PubMed]
- Vogel, S.; Schwabe, L. Learning and memory under stress: Implications for the classroom. NPJ Sci. Learn. 2016, 1, 16011. [Google Scholar] [CrossRef] [PubMed]
- Snyder, H.R.; Young, J.F.; Hankin, B.L. Chronic stress exposure and generation are related to the p-factor and externalizing specific psychopathology in youth. J. Clin. Child Adolesc. Psychol. 2017, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Langley, A.K.; Nadeem, E.; Kataoka, S.H.; Stein, B.D.; Jaycox, L.H. Evidence-based mental health programs in schools: Barriers and facilitators of successful implementation. Sch. Ment. Health 2010, 2, 105–113. [Google Scholar] [CrossRef] [PubMed]
- Feil-Seifer, D.; Mataric, M.J. Defining socially assistive robotics. Rehabilitation Robotics, 2005. In Proceedings of the IEEE Conference on 9th International (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; pp. 465–468. [Google Scholar]
- Breazeal, C. Social robots for health applications. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 5368–5371. [Google Scholar]
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social robots as embedded reinforcers of social behavior in children with autism. J. Autism Dev. Disord. 2013, 43, 1038–1049. [Google Scholar] [CrossRef] [PubMed]
- Duckworth, D.; Henkel, Z.; Wuisan, S.; Cogley, B.; Collins, C.; Bethel, C.L. Therabot: The Initial Design of a Robotic Therapy Support System. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, Portland, OR, USA, 2–5 March 2015; pp. 13–14. [Google Scholar]
- Wada, K.; Shibata, T.; Saito, T.; Sakamoto, K.; Tanie, K. Psychological and social effects of one year robot assisted activity on elderly people at a health service facility for the aged. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2005), Barcelona, Spain, 18–22 April 2005; pp. 2785–2790. [Google Scholar]
- Fernaeus, Y.; Håkansson, M.; Jacobsson, M.; Ljungblad, S. How do you play with a robotic toy animal?: A long-term study of pleo. In Proceedings of the 9th International Conference on Interaction Design and Children, Barcelona, Spain, 9–12 June 2010; pp. 39–48. [Google Scholar]
- Kozima, H.; Michalowski, M.P.; Nakagawa, C. Keepon. Int. J. Soc. Robot. 2009, 1, 3–18. [Google Scholar] [CrossRef]
- Björling, E.A.; Rose, E.; Ren, R. Teen-Robot Interaction: A Pilot Study of Engagement with a Low-fidelity Prototype. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 69–70. [Google Scholar]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive robots as social partners and peer tutors for children: A field trial. Hum.–Comput. Interact. 2004, 19, 61–84. [Google Scholar]
- Kanda, T.; Sato, R.; Saiwaki, N.; Ishiguro, H. A two-month field trial in an elementary school for long-term human—Robot interaction. IEEE Trans. Robot. 2007, 23, 962–971. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K.; Te Boekhorst, R.; Billard, A. Robotic assistants in therapy and education of children with autism: can a small humanoid robot help encourage social interaction skills? Univ. Access Inf. Soc. 2005, 4, 105–120. [Google Scholar] [CrossRef]
- Severinson-Eklundh, K.; Green, A.; Hüttenrauch, H. Social and collaborative aspects of interaction with a service robot. Robot. Auton. Syst. 2003, 42, 223–234. [Google Scholar] [CrossRef]
- Collins, C.; Duckworth, D.; Henkel, Z.; Wuisan, S.; Bethel, C.L. Therabot™: A Robot Therapy Support System in Action. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, Portland, OR, USA, 2–5 March 2015; p. 307. [Google Scholar]
- Sabelli, A.M.; Kanda, T.; Hagita, N. A conversational robot in an elderly care center: An ethnographic study. In Proceedings of the 2011 6th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Lausanne, Switzerland, 6–9 March 2011; pp. 37–44. [Google Scholar]
- Wada, K.; Shibata, T. Living with seal robots—Its sociopsychological and physiological influences on the elderly at a care house. IEEE Trans. Robot. 2007, 23, 972–980. [Google Scholar] [CrossRef]
- Lasota, P.A.; Fong, T.; Shah, J.A. A survey of methods for safe human-robot interaction. Found. Trends Robot. 2017, 5, 261–349. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Crandall, J.W.; Barakova, E. Teleoperation and beyond for assistive humanoid robots. Rev. Hum. Factors Ergon. 2013, 9, 175–226. [Google Scholar] [CrossRef]
- Bailly, G.; Elisei, F. Demonstrating and Learning Multimodal Socio-communicative Behaviors for HRI: Building Interactive Models from Immersive Teleoperation Data. In Proceedings of the FAIM/ISCA Workshop on Artificial Intelligence for Multimodal Human Robot Interaction, Stockholm, Sweden, 14–15 July 2018; pp. 39–43. [Google Scholar]
- Adamides, G.; Christou, G.; Katsanos, C.; Xenos, M.; Hadzilacos, T. Usability guidelines for the design of robot teleoperation: A taxonomy. IEEE Trans. Hum.-Mach. Syst. 2015, 45, 256–262. [Google Scholar] [CrossRef]
- Rosen, P.H.; Sommer, S.; Wischniwski, S. Evaluation of Human-Robot Interaction Quality: A Toolkit for Workplace Design. In Congress of the International Ergonomics Association; Springer: Berlin, Germany, 2018; pp. 1649–1662. [Google Scholar]
- Nikolaidis, S.; Hsu, D.; Srinivasa, S. Human-robot mutual adaptation in collaborative tasks: Models and experiments. Int. J. Robot. Res. 2017, 36, 618–634. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Crosnier, A.; Lasnier, A.; Fraisse, P. Collaborative manufacturing with physical human–robot interaction. Robot. Comput.-Integr. Manuf. 2016, 40, 1–13. [Google Scholar] [CrossRef]
- Trautman, P.; Ma, J.; Murray, R.M.; Krause, A. Robot navigation in dense human crowds: Statistical models and experimental studies of human—Robot cooperation. Int. J. Robot. Res. 2015, 34, 335–356. [Google Scholar] [CrossRef]
- Mead, R.; Matarić, M.J. Autonomous human–robot proxemics: Socially aware navigation based on interaction potential. Auton. Robot. 2017, 41, 1189–1201. [Google Scholar] [CrossRef]
- Unhelkar, V.V.; Pérez-D’Arpino, C.; Stirling, L.; Shah, J.A. Human-robot co-navigation using anticipatory indicators of human walking motion. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6183–6190. [Google Scholar]
- Darling, K.; Nandy, P.; Breazeal, C. Empathic concern and the effect of stories in human-robot interaction. In Proceedings of the 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, 31 August–4 September 2015; pp. 770–775. [Google Scholar]
- Cameron, D.; Aitken, J.; Collins, E.; Boorman, L.; Chua, A.; Fernando, S.; McAree, O.; Martinez Hernandez, U.; Law, J. Framing factors: The importance of context and the individual in understanding trust in human-robot interaction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2015, Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Fung, P.; Bertero, D.; Wan, Y.; Dey, A.; Chan, R.H.Y.; Siddique, F.B.; Yang, Y.; Wu, C.S.; Lin, R. Towards empathetic human-robot interactions. In International Conference on Intelligent Text Processing and Computational Linguistics; Springer: Berlin, Germany, 2016; pp. 173–193. [Google Scholar]
- Salem, M.; Lakatos, G.; Amirabdollahian, F.; Dautenhahn, K. Would you trust a (faulty) robot?: Effects of error, task type and personality on human-robot cooperation and trust. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 141–148. [Google Scholar]
- Walker, T. Establishing Trust in Human-Robot Interaction The Significance of Social and Personal Distance. 2016. Available online: https://commons.erau.edu/hfap/hfap-2015/posters/37/ (accessed on 20 December 2018).
- Kessler, T.T.; Larios, C.; Walker, T.; Yerdon, V.; Hancock, P. A Comparison of Trust Measures in Human–Robot Interaction Scenarios. In Advances in Human Factors in Robots and Unmanned Systems; Springer: Berlin, Germany, 2017; pp. 353–364. [Google Scholar]
- Lewis, M.; Sycara, K.; Walker, P. The role of trust in human-robot interaction. In Foundations of Trusted Autonomy; Springer: Berlin, Germany, 2018; pp. 135–159. [Google Scholar]
- Wagner, A.R. The Role of Trust and Relationships in Human-Robot Social Interaction. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2009. [Google Scholar]
- Bonial, C.; Marge, M.; Foots, A.; Gervits, F.; Hayes, C.J.; Henry, C.; Hill, S.G.; Leuski, A.; Lukin, S.M.; Moolchandani, P.; et al. Laying Down the Yellow Brick Road: Development of a Wizard-of-Oz Interface for Collecting Human-Robot Dialogue. arXiv 2017, arXiv:1710.06406. [Google Scholar]
- Hoffman, G. Openwoz: A runtime-configurable wizard-of-oz framework for human-robot interaction. In Proceedings of the AAAI Spring Symposium on Enabling Computing Research in Socially Intelligent Human-Robot Interaction, Palo Alto, CA, USA, 26–28 March 2018. [Google Scholar]
- Knox, W.B.; Spaulding, S.; Breazeal, C. Learning from the Wizard: Programming Social Interaction through Teleoperated Demonstrations. Available online: https://pdfs.semanticscholar.org/2f04/4effc6b80c8da00fe5aaf1a9ddfaf86e9e16.pdf (accessed on 20 December 2018).
- Mutlu, B.; Yamaoka, F.; Kanda, T.; Ishiguro, H.; Hagita, N. Nonverbal leakage in robots: Communication of intentions through seemingly unintentional behavior. In Proceedings of the 4th ACM/IEEE international conference on Human Robot Interaction, La Jolla, CA, USA, 9–13 March 2009; pp. 69–76. [Google Scholar]
- Riether, N.; Hegel, F.; Wrede, B.; Horstmann, G. Social facilitation with social robots? In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 41–48. [Google Scholar]
- Hessels, R.S.; Holleman, G.A.; Kingstone, A.; Hooge, I.T.; Kemner, C. Gaze allocation in face-to-face communication is affected primarily by task structure and social context, not stimulus-driven factors. Cognition 2019, 184, 28–43. [Google Scholar] [CrossRef] [PubMed]
- Riek, L.; Howard, D. A code of ethics for the human-robot interaction profession. In Proceedings of the We Robot, Stanford, CA, USA, 12–14 April 2014. [Google Scholar]
- Riek, L.D.; Hartzog, W.; Howard, D.A.; Moon, A.; Calo, R. The Emerging Policy and Ethics of Human Robot Interaction. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, Portland, OR, USA, 2–5 March 2015; pp. 247–248. [Google Scholar]
- de Graaf, M.M. An ethical evaluation of human–robot relationships. Int. J. Soc. Robot. 2016, 8, 589–598. [Google Scholar] [CrossRef]
- Westlund, J.K.; Breazeal, C.; Story, A. Deception, Secrets, Children, and Robots: What’s Acceptable. Available online: https://www.media.mit.edu/publications/deception-secrets-children-and-robots-what-s-acceptable/ (accessed on 20 December 2018).
- Sabanovic, S.; Michalowski, M.P.; Simmons, R. Robots in the wild: Observing human-robot social interaction outside the lab. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 596–601. [Google Scholar]
- Salter, T.; Werry, I.; Michaud, F. Going into the wild in child–robot interaction studies: Issues in social robotic development. Intell. Serv. Robot. 2008, 1, 93–108. [Google Scholar] [CrossRef]
- Ros, R.; Nalin, M.; Wood, R.; Baxter, P.; Looije, R.; Demiris, Y.; Belpaeme, T.; Giusti, A.; Pozzi, C. Child-robot interaction in the wild: Advice to the aspiring experimenter. In Proceedings of the 13th International Conference on Multimodal Interfaces, Alicante, Spain, 14–18 November 2011; pp. 335–342. [Google Scholar]
- Bohus, D.; Saw, C.W.; Horvitz, E. Directions robot: In-the-wild experiences and lessons learned. In Proceedings of the 2014 International Conference on Autonomous Agents and Multi-Agent Systems, Paris, France, 5–9 May 2014; pp. 637–644. [Google Scholar]
- Cooley, M. Human-Centered Design. In Information Design; Jacobson, R.E., Ed.; MIT Press: Cambridge, UK, 2000; Chapter 10; pp. 59–81. [Google Scholar]
- Rose, E.J. Design as advocacy: Using a human-centered approach to investigate the needs of vulnerable populations. J. Tech. Writ. Commun. 2016, 46, 427–445. [Google Scholar] [CrossRef]
- Steen, M. Tensions in human-centred design. CoDesign 2011, 7, 45–60. [Google Scholar] [CrossRef]
- Buchanan, R. Human dignity and human rights: Thoughts on the principles of human-centered design. Des. Issues 2001, 17, 35–39. [Google Scholar] [CrossRef]
- Walton, R. Supporting human dignity and human rights: A call to adopt the first principle of human-centered design. J. Tech. Writ. Commun. 2016, 46, 402–426. [Google Scholar] [CrossRef]
- Putnam, C.; Rose, E.; Johnson, E.J.; Kolko, B. Adapting user-centered design methods to design for diverse populations. Inf. Technol. Int. Dev. 2009, 5. [Google Scholar]
- Bell, A.; Davis, K. Learning through Participatory Design: Designing Digital Badges for and with Teens. In Proceedings of the 15th International Conference on Interaction Design and Children, Manchester, UK, 21–24 June 2016; pp. 218–229. [Google Scholar]
- Fitton, D.; Bell, B.T.; Little, L.; Horton, M.; Read, J.C.; Rouse, M.; Toth, N. Working with teenagers in HCI research: A reflection on techniques used in the Taking on the Teenagers project. In Perspectives on HCI Research with Teenagers; Springer: Berlin, Germany, 2016; pp. 237–267. [Google Scholar]
- Fisher, K.E.; Bishop, A.P.; Magassa, L.; Fawcett, P. Action!: Codesigning interactive technology with immigrant teens. In Proceedings of the 2014 Conference on Interaction Design And Children, Aarhus, Denmark, 17–20 June 2014; pp. 345–348. [Google Scholar]
- Schuler, D.; Namioka, A. Participatory Design: Principles and Practices; CRC Press: Abingdon, UK, 1993. [Google Scholar]
- The Methodology of Participatory Design. Tech. Commun. 2005, 52, 163–174.
- Rodil, K.; Rehm, M.; Krummheuer, A.L. Co-designing Social Robots with Cognitively Impaired Citizens. In Proceedings of the 10th Nordic Conference on Human-Computer Interaction (NordiCHI ’18), Oslo, Norway, 29 September–3 October 2018; ACM: New York, NY, USA, 2018; pp. 686–690. [Google Scholar]
- DiSalvo, C.; Nourbakhsh, I.; Holstius, D.; Akin, A.; Louw, M. The Neighborhood Networks project: A case study of critical engagement and creative expression through participatory design. In Proceedings of the Tenth Anniversary Conference on Participatory Design 2008, Indiana University, Bloomington, Indiana, 1–4 October 2008; pp. 41–50. [Google Scholar]
- Vavoula, G.N.; Sharples, M.; Rudman, P.D. Developing the ‘future technology workshop’method. In Proceedings of the International Workshop on Interaction Design and Children, Eindhoven, The Netherlands, 28–29 August 2002; pp. 28–29. [Google Scholar]
- Quesenbery, W.; Brooks, K. Storytelling for User Experience: Crafting Stories for Better Design; Rosenfeld Media: Brooklyn, NY, USA, 2010. [Google Scholar]
- Buxton, B. Sketching User Experiences: Getting the Design Right and the Right Design; Morgan Kaufmann: Burlington, MA, USA, 2010. [Google Scholar]
- Moraveji, N.; Li, J.; Ding, J.; O’Kelley, P.; Woolf, S. Comicboarding: Using comics as proxies for participatory design with children. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 30 April–3 May2007; pp. 1371–1374. [Google Scholar]
- Giacomin, J. What Is Human Centred Design? Des. J. 2014, 17, 606–623. [Google Scholar] [CrossRef]
- Ackerman, E.; Guizzo, E. Darpa robotics challenge: Amazing moments, lessons learned, and what’s next. IEEE Spectr. 2015, 3. [Google Scholar]
- Kamen, D. Inspiring Future Generations in Stem Field through Robotics Competition: A College Student Mentoring Approach. Mech. Eng. Mag. Sel. Artic. 2018, 140, S13–S17. [Google Scholar]
- Verner, I.M.; Ahlgren, D.J.; Mendelssohn, J.E. Fire-Fighting Robot Competitions and Learning Outcomes: A Quantitative Assessment. Age 2000, 5, 1. [Google Scholar]
- Welch, A.G. Using the TOSRA to Assess High School Students’ Attitudes toward Science after Competing in the FIRST Robotics Competition: An Exploratory Study. Eurasia J. Math. Sci. Technol. Educ. 2010, 6, 187–197. [Google Scholar] [CrossRef]
- Rose, E.J.; Björling, E.A. Designing for engagement: Using participatory design to develop a social robot to measure teen stress. In Proceedings of the 35th ACM International Conference on the Design of Communication, Halifax, NS, Canada, 11–13 August 2017; p. 7. [Google Scholar]
- Human Centered Design Tutorials; Design Me: Washington, DC, USA, 2018.
- Rose, E.J.; Björling, E.A.; Kim, A.; Alvarez, N.Y. Usability Testing with Teens: Adapting Human-centered Design and UX Methods. In Proceedings of the 36th ACM International Conference on the Design of Communication (SIGDOC ’18), Milwaukee, WI, USA, 3–5 August 2018; ACM: New York, NY, USA, 2018; pp. 19:1–19:6. [Google Scholar] [CrossRef]
- Krug, S. Don’t Make Me Think!: A Common Sense Approach to Web Usability; Pearson: London, UK, 2000. [Google Scholar]
- Barnum, C.M. Usability Testing Essentials: Ready, Set... Test! Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Powers, A.; Kiesler, S.; Fussell, S.; Fussell, S.; Torrey, C. Comparing a computer agent with a humanoid robot. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Arlington, VA, USA, 9–11 March 2007; pp. 145–152. [Google Scholar]
- Seo, S.H.; Geiskkovitch, D.; Nakane, M.; King, C.; Young, J.E. Poor Thing! Would You Feel Sorry for a Simulated Robot?: A comparison of empathy toward a physical and a simulated robot. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 125–132. [Google Scholar]
- Wainer, J.; Feil-Seifer, D.J.; Shell, D.A.; Mataric, M.J. The role of physical embodiment in human-robot interaction. In Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 117–122. [Google Scholar]
- Conrad, D. Exploring risky youth experiences: Popular theatre as a participatory, performative research method. Int. J. Qual. Methods 2004, 3, 12–25. [Google Scholar] [CrossRef]
- Ponzetti, J.J., Jr.; Selman, J.; Munro, B.; Esmail, S.; Adams, G. The effectiveness of participatory theatre with early adolescents in school-based sexuality education. Sex Educ. 2009, 9, 93–103. [Google Scholar] [CrossRef]
- Newell, A.F.; Carmichael, A.; Morgan, M.; Dickinson, A. The use of theatre in requirements gathering and usability studies. Interact. Comput. 2006, 18, 996–1011. [Google Scholar] [CrossRef]
- Nishio, S.; Ishiguro, H.; Hagita, N. Can a Teleoperated Android Represent Personal Presence?—A Case Study with Children. Psychologia 2018, 50, 189–203. [Google Scholar]
- Ishiguro, H.; Dalla Libera, F. Geminoid Studies: Science and Technologies for Humanlike Teleoperated Androids; Springer: Berlin, Germany, 2018. [Google Scholar]
- Butler, D.J.; Huang, J.; Roesner, F.; Cakmak, M. The privacy-utility tradeoff for remotely teleoperated robots. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 27–34. [Google Scholar]
- Suguitan, M.; Hoffman, G. Blossom: A Tensile Social Robot Design with a Handcrafted Shell. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; p. 383. [Google Scholar]
- Nielsen, J.; Clemmensen, T.; Yssing, C. Getting access to what goes on in people’s heads?: Reflections on the think-aloud technique. In Proceedings of the Second Nordic Conference on Human-Computer Interaction, Aarhus, Denmark, 19–23 October 2002; pp. 101–110. [Google Scholar]
- Feng, Y.; Preston, J.A.; Skelton, J. Asymmetric game design and player location: An empirical study on mobile play experiences. In Proceedings of the 2013 18th International Conference on Computer Games: AI, Animation, Mobile, Interactive Multimedia, Educational & Serious Games (CGAMES), Louisville, KY, USA, 30 July–1 August 2013; pp. 127–131. [Google Scholar]
- Jagosh, J.; Bush, P.L.; Salsberg, J.; Macaulay, A.C.; Greenhalgh, T.; Wong, G.; Cargo, M.; Green, L.W.; Herbert, C.P.; Pluye, P. A realist evaluation of community-based participatory research: Partnership synergy, trust building and related ripple effects. BMC Public Health 2015, 15, 725. [Google Scholar] [CrossRef] [PubMed]
- Christopher, S.; Watts, V.; McCormick, A.K.H.G.; Young, S. Building and maintaining trust in a community-based participatory research partnership. Am. J. Public Health 2008, 98, 1398–1406. [Google Scholar] [CrossRef] [PubMed]
- Zawieska, K. Deception and manipulation in social robotics. In Proceedings of the Workshop on the Emerging Policy and Ethic of Human-Robot Interaction at the 10th ACM/IEEE International Conference on Human-Robot Interaction (HRI2015), Portland, OR, USA, 2–5 March 2015. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}