Use of Haptics to Promote Learning Outcomes in Serious Games


Abstract
:1. Introduction
- It appears that the haptic modality has been exploited mainly in order to reproduce real-life sensations.For example, Rodrigues et al. suggest that the incorporation of haptic systems in Serious Games allows one to augment the level of realism and to achieve a more efficient level of involvement [30]. Deng et al. concluded that haptics introduce one more dimension of sensory modality for a more immersive game experience [27]. In the same way, Hou et al. highlighted that haptics may be used to simulate an immersive and realistic virtual environment [29]. Beyond the incontestable advantages mentioned, noting that one of the main advantages of a SG is in its ability to exceed the limits of the real word, we argue that haptics can be relevant for the rendering of information that is not represented (or is under represented) in the real world. For example, in a Serious Game dedicated to the analysis of data resulting from Computational Fluid Dynamics (CFD) simulations, the haptic feedback may be useful to help the user to track a streamline [25].
- Haptics are not included at the core of the game design process; one talks about integrating the haptic into the game.In this view, the haptic interaction is seen as being a third party that would be added afterwards into the game. For example, Rodriguez et al. noticed that there is an important question about to how "to integrate haptic devices", to conform their limitations to a specific problem addressed in a Serious Game [30]. They also point out that the integration of the device should be realized without compromising the content of the SG [30]. However, considering the singularity of the haptic modality (being bidirectional), one cannot separate haptics from the content nor from the interaction with the game. On the contrary, we argue that haptic interactions have to be central to the design process.
2. Haptics
2.1. Added Value of a Visio-Haptic Interaction
- The haptic channel may be helpful to unload the visual channel.In contrast to a situation having a pure visual interaction, the haptic feedback offers an additional channel for the rendering of information. For example, the haptic feedback is used to convey physico-chemical forces of intermolecular bonds [32]. In this situation, the haptic interaction may be exploited to extend the communication bandwidth between the user and the virtual environment.
- The haptic rendering of information allows for strengthening information already presented in the visual channel.As in the case of a pleonasm, to reinforce information, although already visually rendered, it can also be presented via the haptic channel. In [33], the haptic feedback allows for reinforcing the rendering of various internal organs perceived throughout different hardness.
- The haptic rendering of information may be exploited to supplement the visual feedback.In this case, the haptic modality gives access to information that is hardly or not perceptible visually. For example, Menelas et al. have exploited tactons to convey a risk of fall while walking [34].
2.2. Psychophysical Characteristics of the Haptic Perception
- Haptics provide a bi-directional communication channel.The characteristic that is unique to the haptic modality is its bi-directionality. The perception of visual information is not much influenced by the action of the person. Furthermore, a scene presented visually is perceived as a coherent whole. In the haptic case, the process of integration is quite different because the haptic perception of information requires a specific type of movement named Exploration Procedure (EP) [35,36]. Therefore, the perception of any particular haptic information (weight, texture, hardness) requires for each one a specific movement. A weight requires different vertical movements, while lateral ones are better suited for the perception of a texture. Doing so, the haptic perception of information implies a two-way communication with the entity of interest.
- Haptics are very intimate and provide a strong connection.However, humans can express emotions through speech or writing as one says in intense emotional moments: there is no word to express the feelings. For such moments, only a touch, the physical contact, allows to convey what one feels as trusting someone [37,38]. This explains why touch is more intimate and creates a direct link between a person and the environment (ecological, digital). In the same way, a mother hugging her child will transmit the love and the feeling of security that the child needs for his well-being and for building his self-esteem [39]. Furthermore, the fact of feeling material properties such as temperature and texture strengthens the emotional dimension of other modalities [40]. For instance, touching a rough texture can lead to feeling more empathy [41], just as a temperature can affect people’s generosity or even influence their judgment [42]. That being said, touching may also become inappropriate and too invasive in some cases [43]. In some societies, touching someone can be seen as being a very impolite act, or even rude. McLean argues that some people are haptically challenged and do not generally find touching natural, informative or pleasant [44,45].
- Haptics allow high differentiation but are not adapted to memorization [44].By touching, one can differentiate several levels of texture or detect a damaged surface or a scratch. However, it is almost impossible to recall these levels. Unlike in the visual modality where any color gamut is associated with a shade; for the haptic case, it is completely different. One can identify only a few textures described with adjectives such as: sticky, rough, smooth. In fact, all the physical properties that define the microstructure of a surface (roughness, hardness and elasticity) are encompassed in the term “texture”.
- Haptics can be influenced by the visual.Welch noticed that vision dominates the other channels in spatial perception [46]. Therefore, visual information has a direct impact on the haptic perception as well as on limb position (hand) [47] and object size [48,49]. Koseleff has pointed out that subjects perceived differently the weight of an object through a lens [50]. The perceived weight increases whenever the size increases.
3. A new model to support learning outcomes in SGs
3.1. Respondent Conditioning: A Means for the Development of Technical or Motor Skills
3.2. Operant Conditioning: A Way to Engage the Player with the Content of the Game
3.3. Constructivism Approach: A Means to Support Cognitive Skills
3.4. Schematization of This Model
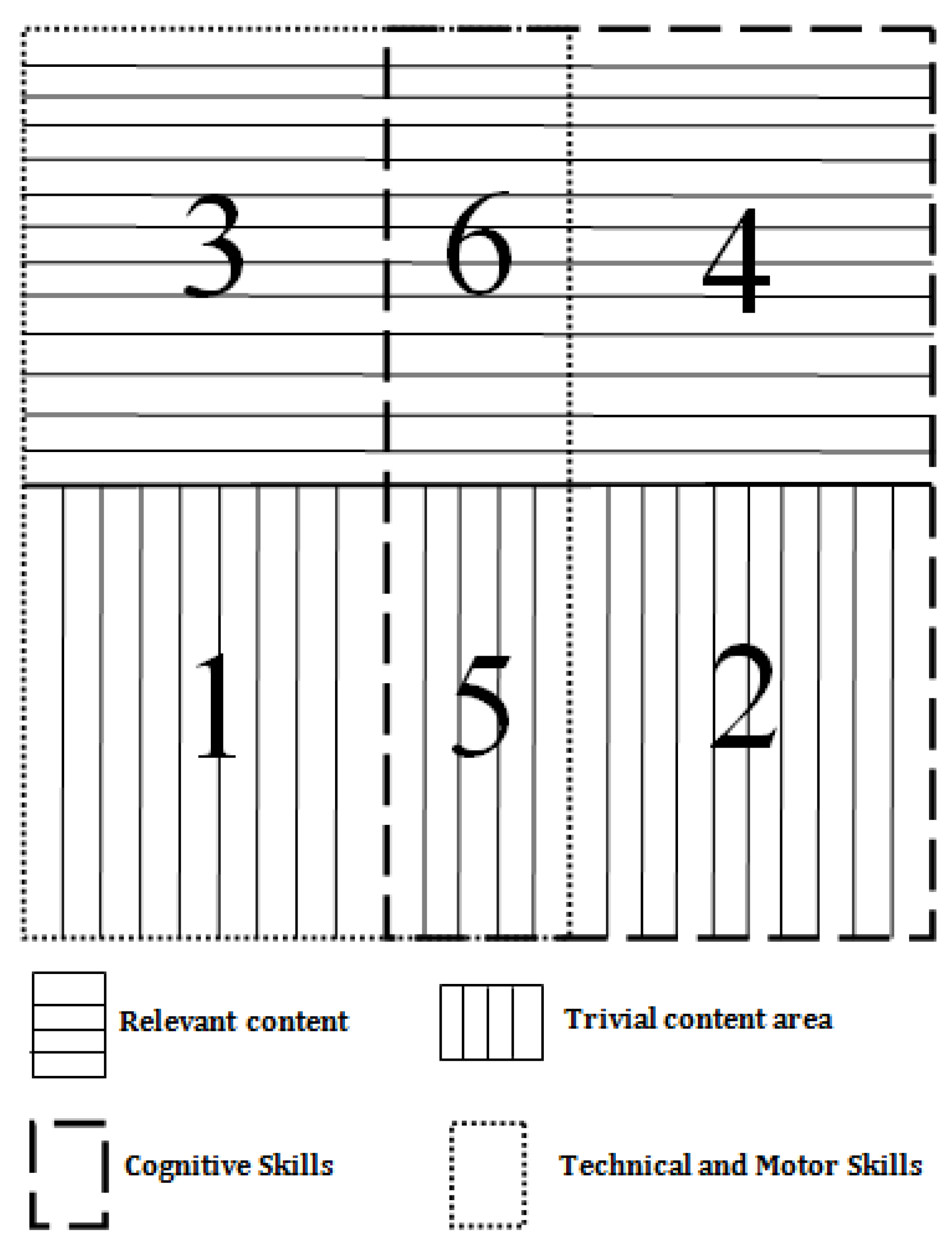
- In area 1, technical skills associated with trivial contents are considered. In a driving simulator, the auditory rendering of the engine of other cars is located in this area.
- In area 2, cognitive skills associated with trivial contents are considered. In a driving simulator, if the goal is to learn to maintain the steering wheel in a particular direction, interactions with the dashboard are situated in this area.
- In area 3, the technical skills associated with valuable content are represented. In the case of a simulation about the landing performance of an aircraft in turbulent conditions [77], the rendering of the turbulence is a relevant content that is associated with technical skills.
- In area 4, the cognitive skills associated with valuable content are represented. In a tornado analysis simulator [78], tools that allow one to draw or to follow elements of interest as “flowlines” are valuable contents associated with cognitive skills.
- In area 5, physico-cognitive activities with trivial information are considered. Let us consider a driving simulation where the objective is to avoid technical mistakes. Having a map that allows the user to search for the quickest route is a trivial content that requires physico-cognitive skills.
- In area 6, motor and cognitive skills are solicited with a relevant content. In the case of a surgical simulator, a scenario that would take us to this area would be the following: the practitioner has to make several realistic maneuvers to try to stabilize a patient. Every element of the simulator that informs about the state of the patient is relevant content.
4. Use of the Haptic Modality to Support Learning Outcomes
4.1. Haptics to Engage the Player with the Content of the Game
4.2. Use of Haptics for the Development of Technical or Motor Skills
4.3. Use of Haptics for the Development of Cognitive Skills
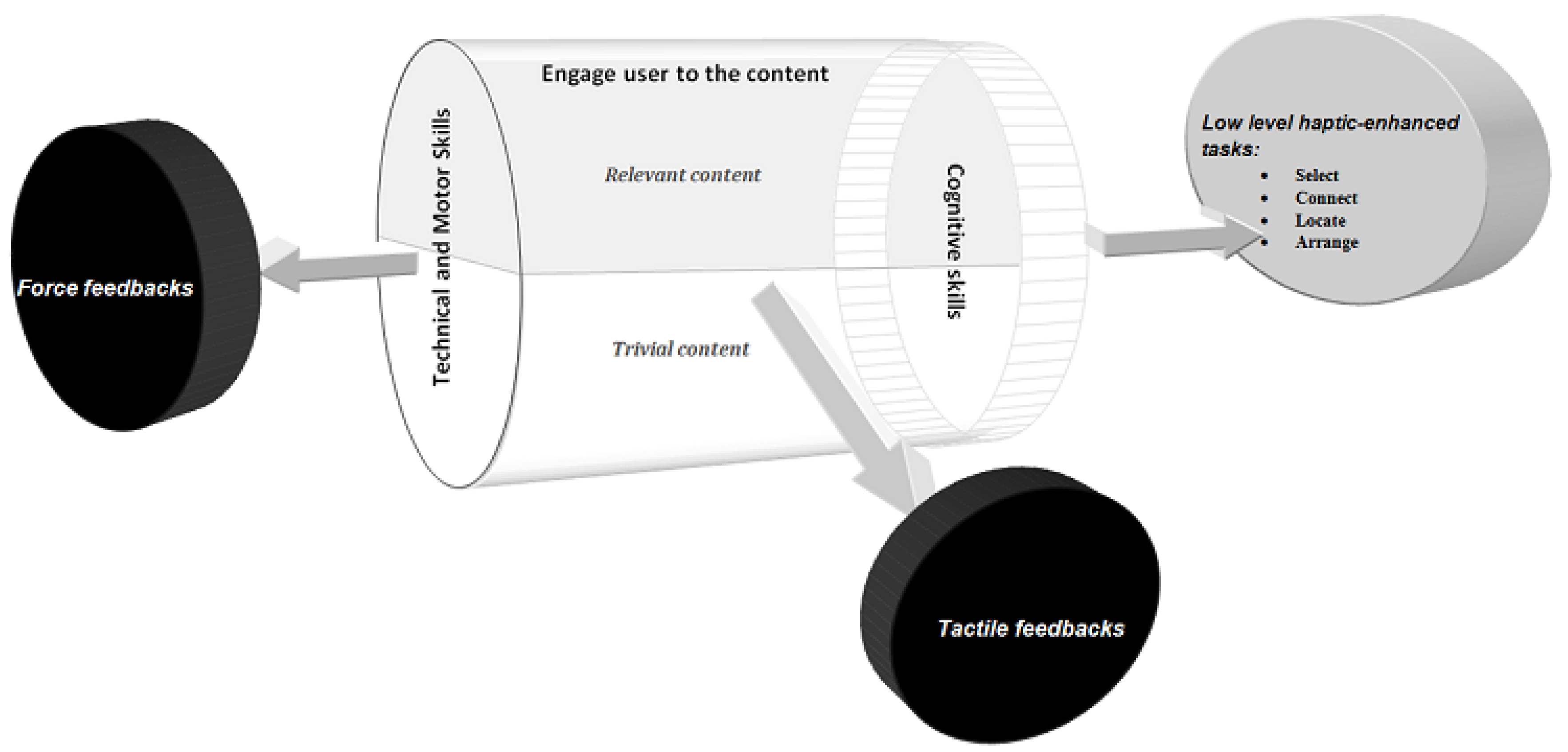
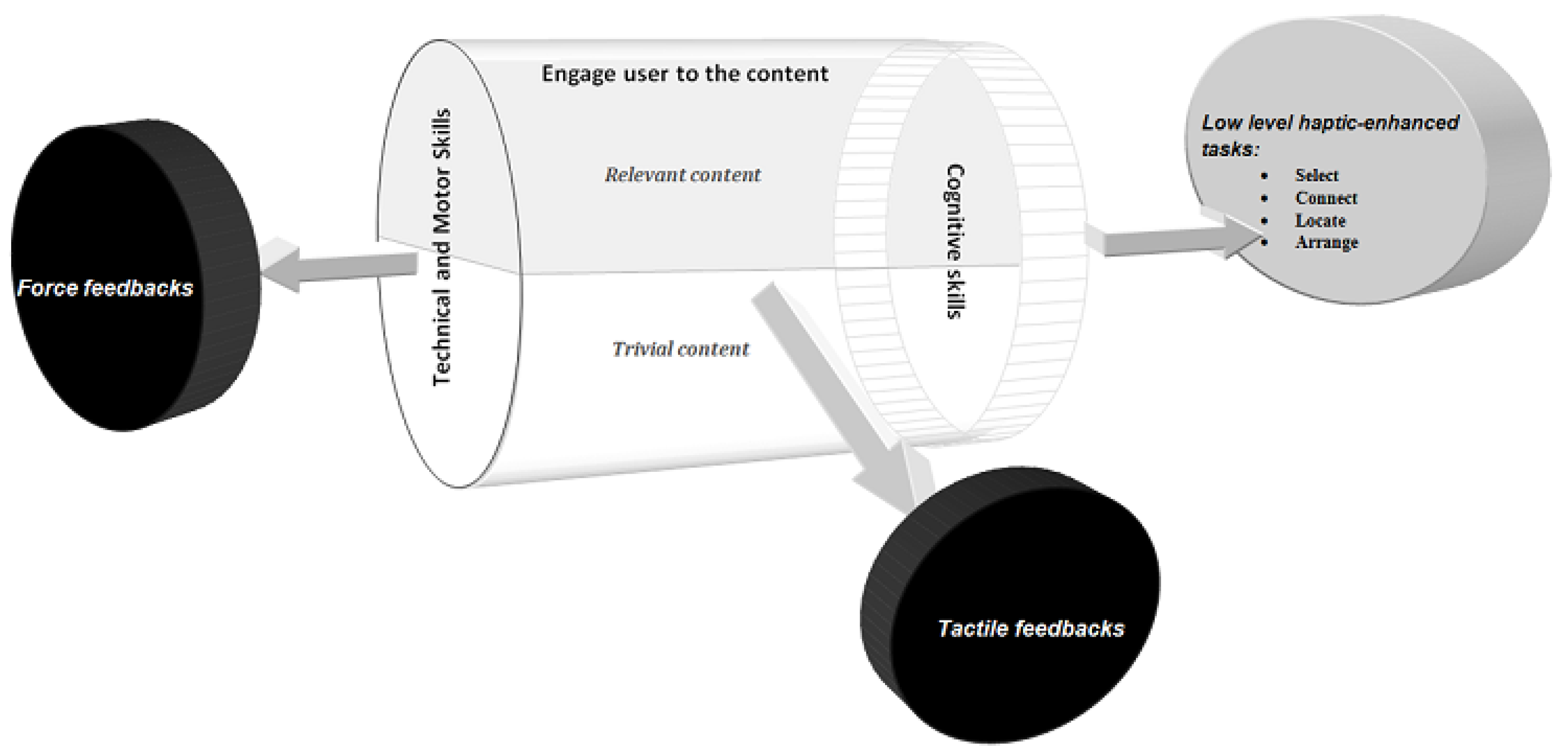
- Select: to choose or mark an entity of interest.In a selection, the haptic feedback is employed in order to assist users in picking up a point of interest. In haptic augmented selection, a pseudo-attractive force is usually simulated at the position of the entities of interest (also manned target). In situations where a single target is rendered, such haptic feedback allows one to improve the completion velocity as well as the accuracy of the task [89]. When there are multiple targets, for each target, an area of influence has to be defined in order to obtain the advantage of the haptic interaction [90,91].
- Locate: to spatially and temporally situate an entity of interest in the dataset.One of the first methods that has been proposed concerns the identification of regions containing high values with velocity mapping [92]. The field value is mapped to the velocity of the haptic device. This method slows down the hand of the user in regions having values of interest. In the analysis of an unsteady flow, critical points located in the immediate environment of the users are rendered visually by colored spheres and haptically through a sinusoidal vibration. Realized experiments show that vibration feedback reinforces the visual feedback and facilitate the construction of a mental map of the analyzed Computational Fluid Dynamics simulation.
- Connect: to join elements with common properties.This approach allows one to haptically track structures of interests. In doing so, local properties of this structure can be studied adequately. This also allows one to take advantage of multimodal analysis. With this approach, some methods relate to the haptic rendering of lines, others relate to the haptic rendering of iso-surfaces. For haptic rendering of lines, most of the methods have been proposed by Pao et al. in [92] and van Reimersdahl et al. in [93]. Haptic rendering of isosurfaces have been introduced by Mark et al. and Avila et al., respectively, in [94,95]. Subsequently, several researchers have proposed significant improvements [33,96,97,98].
- Arrange: to assist users in the spatial arrangement of analyzed elements.Here, some constraint rules may be employed in order to guide the gestures of the user based on some information contained within the dataset. Such methods have been successfully employed to overcome limitations of traditional docking algorithms. The haptic feedback allows one to translate physical and chemical properties of elements to the user involved into the docking process. By means of the haptic modality, a greater amount of information is transmitted to the user without risking the overload of the visual channel.
4.4. Discussion and Evaluation
- The descriptive power: the ability to describe a significant range of existing methods,
- The evaluative power: the ability to help assess multiple existing methods,
- The generative power: the ability to help in the design of new methods.
4.4.1. Descriptive power
4.4.2. Evaluative power
4.4.3. Generative power
- Engaging the player with the content of the game,
- The development of technical skills.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Manning, J. The Emblem; Reaktion Books: London, UK, 2004. [Google Scholar]
- Haidon, C.; Ecrepont, A.; Girard, B.; Menelas, B.A.J. A Driving Simulator Designed for the Care of Trucker Suffering from Post-Traumatic Stress Disorder. In Serious Games and Edutainment Applications; Springer: New York, NY, USA, 2017; pp. 411–431. [Google Scholar]
- Ecrepont, A.; Haidon, C.; Girard, B.; Menelas, B.A.J. A fully customizable truck-driving simulator for the care of people suffering from Post-Traumatic Stress Disorder. In Proceedings of the Serious Games and Applications for Health (SeGAH), 2016 IEEE International Conference, Orlando, FL, USA, 11–13 May 2016; pp. 1–8. [Google Scholar]
- Menelas, B.A.J.; Haidon, C.; Ecrepont, A.; Girard, B. Use of virtual reality technologies as an Action-Cue Exposure Therapy for truck drivers suffering from Post-Traumatic Stress Disorder. Entertain. Comput. 2018, 24, 1–9. [Google Scholar]
- Haidon, C.; Ecrepont, A.; Girard, B.; Menelas, B.A.J. Gamification of a truck-driving simulator for the care of people suffering from post-traumatic stress disorder. In Proceedings of the International Conference on Games and Learning Alliance, Rome, Italy, 9–11 December 2015; Springer: New York, NY, USA, 2015; pp. 312–322. [Google Scholar]
- Sawyer, B.; Smith, P. Serious games taxonomy. In Proceedings of the Slides from the Serious Games Summit at the Game Developers Conference, San Francisco, CA, USA, 18–19 February 2008. [Google Scholar]
- Iten, N.; Petko, D. Learning with serious games: Is fun playing the game a predictor of learning success? Br. J. Educ. Technol. 2016, 47, 151–163. [Google Scholar] [CrossRef]
- Norman, D. Things That Make Us Smart: Defending Human Attributes in the Age of the Machine; Basic Books: New York, NY, USA, 1993. [Google Scholar]
- Stapleton, A.J. Serious games: Serious opportunities. In Proceedings of the Australian Game Developers’ Conference, Melbourne, Australia, 1–3 December 2015; Academic Summit: Melbourne, Australia, 2004. [Google Scholar]
- O’Neil, H.F.; Wainess, R.; Baker, E.L. Classification of learning outcomes: Evidence from the computer games literature. Curric. J. 2005, 16, 455–474. [Google Scholar] [CrossRef]
- Boukhris, S.; Menelas, B.A.J. Towards the Use of a Serious Game to Learn to Identify the Location of a 3D Sound in the Virtual Environment. In Proceedings of the International Conference on Human-Computer Interaction, Vancouver, BC, Canada, 9–14 July 2017; Springer: New York, NY, USA, 2017; pp. 35–44. [Google Scholar]
- Yahyaoui, H.; Menelas, B.A.J. Towards the development of a serious game that targets psychological stressors of the workplace. In Proceedings of the Serious Games and Applications for Health (SeGAH), 2017 IEEE 5th International Conference, Perth, WA, Australia, 2–4 April 2017; pp. 1–6. [Google Scholar]
- Adam, S. Using learning outcomes. In Report for United Kingdom Bologna Seminar; Heriot-Watt University (Edinburgh Conference Centre): Edinburgh, UK, 2004; pp. 1–2. [Google Scholar]
- Mayer, R.E. The Cambridge Handbook of Multimedia Learning; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Johnson, C.I.; Bailey, S.K.; Van Buskirk, W.L. Designing Effective Feedback Messages in Serious Games and Simulations: A Research Review. In Instructional Techniques to Facilitate Learning and Motivation of Serious Games; Springer: New York, NY, USA, 2017; pp. 119–140. [Google Scholar]
- Bourgault, N.; Bouchard, B.; Menelas, B.A.J. Effect of ecological gestures on the immersion of the player in a serious game. In Proceedings of the International Conference on Serious Games Development and Applications, Berlin, Germany, 9–10 October 2014; Springer: New York, NY, USA, 2014; pp. 21–33. [Google Scholar]
- Bouchard, B.; Imbeault, F.; Bouzouane, A.; Menelas, B.A.J. Developing serious games specifically adapted to people suffering from Alzheimer. In Proceedings of the International Conference on Serious Games Development and Applications, Bremen, Germany, 26–29 September 2012; Springer: New York, NY, USA, 2012; pp. 243–254. [Google Scholar]
- Boukhris, S.; Menelas, B.A.J. Towards the Use of a Serious Game to Learn to Identify the Location of a 3D Sound in the Virtual Environment. In Proceedings of the International Conference on Human-Computer Interaction, Vancouver, BC, Canada, 9–14 July 2017; Springer: New York, NY, USA, 2017; pp. 35–44. [Google Scholar]
- Grill-Spector, K.; Kushnir, T.; Edelman, S.; Avidan, G.; Itzchak, Y.; Malach, R. Differential processing of objects under various viewing conditions in the human lateral occipital complex. Neuron 1999, 24, 187–203. [Google Scholar] [CrossRef]
- Downing, P.E.; Jiang, Y.; Shuman, M.; Kanwisher, N. A cortical area selective for visual processing of the human body. Science 2001, 293, 2470–2473. [Google Scholar] [CrossRef] [PubMed]
- Kanwisher, N.; McDermott, J.; Chun, M.M. The fusiform face area: A module in human extrastriate cortex specialized for face perception. J. Neurosci. 1997, 17, 4302–4311. [Google Scholar] [PubMed]
- Gauthier, I.; Tarr, M.J.; Anderson, A.W.; Skudlarski, P.; Gore, J.C. Activation of the middle fusiform’face area’increases with expertise in recognizing novel objects. Nat. Neurosci. 1999, 2, 568–573. [Google Scholar] [CrossRef] [PubMed]
- Freides, D. Human information processing and sensory modality: Cross-modal functions, information complexity, memory, and deficit. Psychol. Bull. 1974, 81, 284–310. [Google Scholar] [CrossRef] [PubMed]
- Nesbitt, K. Designing Multi-Sensory Displays for Abstract Data; University of Sydney: Sydney, Australia, 2003. [Google Scholar]
- Menelas, B.; Ammi, M.; Pastur, L.; Bourdot, P. Haptical exploration of an unsteady flow. In Proceedings of the World Haptics 2009—Third Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Salt Lake City, UT, USA, 18–20 March 2009; pp. 232–237. [Google Scholar]
- Menelas, B.A.J. Interactive analysis of cavity-flows in a virtual environment. In Proceedings of the 28th Spring Conference on Computer Graphics, Budmerice, Slovakia, 2–4 May 2012; ACM: New York, NY, USA, 2013; pp. 31–37. [Google Scholar]
- Deng, S.; Chang, J.; Zhang, J.J. A survey of haptics in serious gaming. In Proceedings of the International Conference on Games and Learning Alliance, Paris, France, 23–25 October 2013; Springer: New York, NY, USA, 2013; pp. 130–144. [Google Scholar]
- Laamarti, F.; Eid, M.; Saddik, A.E. An overview of serious games. Int. J. Comput. Games Technol. 2014, 2014, 358152. [Google Scholar] [CrossRef]
- Hou, X.; Sourina, O.; Klimenko, S. Haptic-Based Serious Games. In Proceedings of the Cyberworlds (CW), 2014 International Conference on IEEE, Santander, Spain, 6–8 October 2014; pp. 39–46. [Google Scholar]
- Rodrigues, H.F.; Machado, L.S.; Valença, A.M.G. Applying Haptic Systems in Serious Games: A Game for Adult’s Oral Hygiene Education. SBC 2014, 5, 16–25. [Google Scholar]
- Menelas, B.A.J. Virtual Reality Technologies (Visual, Haptics, and Audio) in Large Datasets Analysis. In Innovative Approaches of Data Visualization and Visual Analytics; Huang, M.L., Ed.; IGI Global: Hershey, PA, USA, 2014; pp. 111–132. [Google Scholar]
- Persson, P.B.; Cooper, M.D.; Tibell, L.A.; Ainsworth, S.; Ynnerman, A.; Jonsson, B.H. Designing and evaluating a haptic system for biomolecular education. In Proceedings of the IEEE Virtual Reality Conference (VR’07), Charlotte, NC, USA, 10–14 March 2007; pp. 171–178. [Google Scholar]
- Lundin, K.; Ynnerman, A.; Gudmundsson, B. Proxy-based haptic feedback from volumetric density data. In Proceedings of the Eurohaptic Conference, Edinburgh, UK, 8–10 July 2002; pp. 104–109. [Google Scholar]
- Menelas, B.A.J.; Otis, M.J.D. Design of a serious game for learning vibrotactile messages. In Proceedings of the Haptic Audio Visual Environments and Games (HAVE), 2012 IEEE International Workshop, Munich, Germany, 8–9 October 2012; pp. 124–129. [Google Scholar]
- Lederman, S.J.; Klatzky, R.L. Hand movements: A window into haptic object recognition. Cogn. Psychol. 1987, 19, 342–368. [Google Scholar] [CrossRef]
- Klatzky, R.L.; Lederman, S.J. Identifying objects from a haptic glance. Atten. Percept. Psychophys. 1995, 57, 1111–1123. [Google Scholar] [CrossRef]
- Crusco, A.H.; Wetzel, C.G. The Midas touch: The effects of interpersonal touch on restaurant tipping. Personal. Soc. Psychol. Bull. 1984, 10, 512–517. [Google Scholar] [CrossRef]
- Stephen, R.; Zweigenhaft, R.L. The effect on tipping of a waitress touching male and female customers. J. Soc. Psychol. 1986, 126, 141–142. [Google Scholar] [CrossRef]
- Koole, S.L.; Tjew A Sin, M.; Schneider, I.K. Embodied terror management: Interpersonal touch alleviates existential concerns among individuals with low self-esteem. Psychol. Sci. 2014, 25, 30–37. [Google Scholar] [CrossRef] [PubMed]
- Knapp, M.L.; Hall, J.A.; Horgan, T.G. Nonverbal Communication in Human Interaction; Cengage Learning: Boston, MA, USA, 2013. [Google Scholar]
- Wang, C.; Zhu, R.J.; Handy, T.C. Experiencing haptic roughness promotes empathy. J. Consum. Psychol. 2016, 26, 350–362. [Google Scholar]
- Williams, L.E.; Bargh, J.A. Experiencing physical warmth promotes interpersonal warmth. Science 2008, 322, 606–607. [Google Scholar] [CrossRef] [PubMed]
- Burgoon, J.K.; Walther, J.B. Nonverbal expectancies and the evaluative consequences of violations. Hum. Commun. Res. 1990, 17, 232–265. [Google Scholar] [CrossRef]
- MacLean, K.E. Designing with haptic feedback. In Proceedings of the IEEE Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 783–788. [Google Scholar]
- MacLean, K.E. Application-centered haptic interface design. In Human and Machine Haptics; Srinivasan, M., Cutkosky, M., Eds.; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Welch, R.B.; Warren, D.H. Immediate perceptual response to intersensory discrepancy. Psychol. Bull. 1980, 88, 638–667. [Google Scholar] [CrossRef] [PubMed]
- Pick, H.L.; Warren, D.H.; Hay, J.C. Sensory conflict in judgments of spatial direction. Atten. Percept. Psychophys. 1969, 6, 203–205. [Google Scholar]
- Rock, I.; Harris, C.S. Vision and touch. Sci. Am. 1967, 216, 96–107. [Google Scholar] [CrossRef] [PubMed]
- Kinney, J.A.S.; Luria, S.M. Conflicting visual and tactual-kinesthetic stimulation. Atten. Percept. Psychophys. 1970, 8, 189–192. [Google Scholar] [CrossRef]
- Koseleff, P. Studies in the perception of heaviness. I. 1.2: Some relevant facts concerning the size-weight-effect (SWE). Acta Psychol. 1957, 13, 242–252. [Google Scholar] [CrossRef]
- Gross, R. Psychology: The Science of Mind and Behaviour, 7th ed.; Hodder Education: London, UK, 2015. [Google Scholar]
- Schunk, D.H. Learning Theories: An Educational Perspective, 5th ed.; Pearson/Merrill Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Pavlov, I.P.; Anrep, G.V. Conditioned Reflexes; Courier Corporation: North Chelmsford, MA, USA, 2003. [Google Scholar]
- Skinner, B.F. Science and Human Behavior; Simon and Schuster: New York, NY, USA, 1953. [Google Scholar]
- Creed, R.S.; Denny-Brown, D.; Eccles, J.C.; Liddell, E.G.T.; Sherrington, C.S. Reflex Activity of the Spinal Cord; Clarendon Press: Oxford, UK, 1932. [Google Scholar]
- Seefeldt, V.; Reuschlein, S.; Vogel, P. Sequencing motor skills within the physical education curriculum. In Proceedings of the Meeting of American Association of Health, Physical Education and Recreation, Houston, TX, USA, April 1972. [Google Scholar]
- Kottke, F. From reflex to skill: The training of coordination. Arch. Phys. Med. Rehabil. 1980, 61, 551–561. [Google Scholar] [PubMed]
- Clark, J.E.; Metcalfe, J.S. The mountain of motor development: A metaphor. In Motor Development: Research and Reviews; Clark, J.E., Metcalfe, J., Eds.; NASPE Pulications: Reston, VA, USA, 2002. [Google Scholar]
- Bendtsen, L.; Jensen, R.; Jensen, N.; Olesen, J. Pressure-controlled palpation: A new technique which increases the reliability of manual palpation. Cephalalgia 1995, 15, 205–210. [Google Scholar] [CrossRef] [PubMed]
- Kvåle, A.; Ljunggren, A.E.; Johnsen, T.B. Palpation of muscle and skin. Is this a reliable and valid procedure in assessment of patients with long-lasting musculoskeletal pain? Adv. Physiother. 2003, 5, 122–136. [Google Scholar] [CrossRef]
- Lavoie, T.; Menelas, B.A.J. Design of a set of foot movements for a soccer game on a mobile phone. Comput. Games J. 2016, 5, 131–148. [Google Scholar] [CrossRef]
- Giuliani, M.; Lajolo, C.; Clemente, L.; Querqui, A.; Viotti, R.; Boari, A.; Miani, C. Is manual dexterity essential in the selection of dental students? Br. Dent. J. 2007, 203, 149–155. [Google Scholar] [CrossRef] [PubMed]
- Hommel, B.; Müsseler, J.; Aschersleben, G.; Prinz, W. The Theory of Event Coding (TEC): A framework for perception and action planning. Behav. Brain Sci. 2001, 24, 849–878. [Google Scholar] [CrossRef] [PubMed]
- Mechsner, F.; Kerzel, D.; Knoblich, G.; Prinz, W. Perceptual basis of bimanual coordination. Nature 2001, 414, 69. [Google Scholar] [CrossRef] [PubMed]
- Schack, T.; Mechsner, F. Representation of motor skills in human long-term memory. Neurosci. Lett. 2006, 391, 77–81. [Google Scholar] [CrossRef] [PubMed]
- Kraiger, K.; Ford, J.K.; Salas, E. Application of cognitive, skill-based, and affective theories of learning outcomes to new methods of training evaluation. J. Appl. Psychol. 1993, 78, 311–328. [Google Scholar] [CrossRef]
- Csikszentmihalyi, M. Flow: The Psychology of Optimal Performance; Harper Perennial: New York, NY, USA, 1990. [Google Scholar]
- Okan, Z. Edutainment: is learning at risk? Br. J. Educ. Technol. 2003, 34, 255–264. [Google Scholar] [CrossRef]
- Cheek, D.W. Thinking Constructively About Science, Technology, and Society Education: General Introduction and From the Creation to the Flood; Suny Press: Albany, NY, USA, 1992. [Google Scholar]
- Brooks, J.G. In Search of Understanding: The Case for Constructivist Classrooms; ASCD: Alexandria, VA, USA, 1999. [Google Scholar]
- Valera, F.; Thompson, E.; Rosch, E. The Embodied Mind: Cognitive Science and Human Experience; MIT Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Shneiderman, B. The eyes have it: A task by data type taxonomy for information visualizations. In Proceedings of the IEEE Symposium on Visual Languages, Boulder, CO, USA, 3–6 September 1996; pp. 336–343. [Google Scholar]
- Tory, M.; Moller, T. Rethinking Visualization: A High-Level Taxonomy. In Proceedings of the IEEE Symposium on Information Visualization, Austin, TX, USA, 10–12 October 2004; pp. 151–158. [Google Scholar]
- Amar, R.; Eagan, J.; Stasko, J. Low-level components of analytic activity in information visualization. In Proceedings of the IEEE Symposium on Information Visualization, Minneapolis, MN, USA, 23–25 October 2005; pp. 111–117. [Google Scholar]
- Yi, J.S.; ah Kang, Y.; Stasko, J.; Jacko, J. Toward a Deeper Understanding of the Role of Interaction in Information Visualization. IEEE Trans. Vis. Comput. Graph. 2007, 13, 1224–1231. [Google Scholar] [CrossRef] [PubMed]
- Nesbitt, K. Designing Multi-Sensory Displays for Abstract Data; University of Sydney, School of Information Technologies: Sydney, Australia, 2003. [Google Scholar]
- Repperger, D.; Gilkey, R.; Green, R.; LaFleur, T.; Haas, M. Effects of haptic feedback and turbulence on landing performance using an immersive cave automatic virtual environment (CAVE). Percept. Mot. Skills 2003, 97, 820–832. [Google Scholar] [CrossRef] [PubMed]
- Brederson, J.D.; Ikits, M.; Johnson, C.R.; Hansen, C.D.; Hollerbach, J. The visual haptic workbench. In Proceedings of the Fifth PHANToM Users Group Workshop, Aspen, CO, USA, 28–30 October 2000. [Google Scholar]
- Eid, M.A.; Al Osman, H. Affective haptics: Current research and future directions. IEEE Access 2016, 4, 26–40. [Google Scholar] [CrossRef]
- Basori, A.H.; Daman, D.; Bade, A.; Sunar, M.S.; Saari, N. The feasibility of human haptic emotion as a feature to enhance interactivity and immersiveness on virtual reality game. In Proceedings of the 7th ACM SIGGRAPH International Conference on Virtual-Reality Continuum and Its Applications in Industry, Singapore, 8–9 December 2008; ACM: New York, NY, USA, 2008; p. 37. [Google Scholar]
- Wilson, G.; Davidson, G.; Brewster, S.A. In the heat of the moment: Subjective interpretations of thermal feedback during interaction. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015; ACM: New York, NY, USA, 2015; pp. 2063–2072. [Google Scholar]
- Mclaughlin, M.; Cohen, I.; Desbrun, M.; Hovanessian, L.; Jordan-Marsh, M.; Narayanan, S.; Sukhatme, G.; Georgiou, P.; Ananthakrishnan, S.; Peng, W.; et al. Haptic Simulator for Training in Clinical Breast Examination; Annenberg School for Communication: Philadelphia, PA, USA, 2003. [Google Scholar]
- Marti, G.; Rouiller, P.; Grange, S.; Baur, C. Biopsy navigator: A smart haptic interface for interventional radiological gestures. Int. Congr. Ser. 2003, 1256, 788–793. [Google Scholar] [CrossRef]
- Esen, H.; Yano, K.; Buss, M. A virtual environment medical training system for bone drilling with 3 DOF force feedback. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004; Volume 4, pp. 3631–3636. [Google Scholar]
- Fager, P.J. The use of haptics in medical applications. Int. J. Med. Robot. Comput. Assist. Surg. 2004, 1, 36–42. [Google Scholar] [CrossRef] [PubMed]
- Tholey, G.; Desai, J.P.; Castellanos, A.E. Force feedback plays a significant role in minimally invasive surgery: Results and analysis. Ann. Surg. 2005, 241, 102–109. [Google Scholar] [PubMed]
- Feygin, D.; Keehner, M.; Tendick, R. Haptic guidance: Experimental evaluation of a haptic training method for a perceptual motor skill. In Proceedings of the 10th Symposium on IEEE Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS 2002), Orlando, FL, USA, 24–25 March 2002; pp. 40–47. [Google Scholar]
- Yi, J.S.; Ah Kang, Y.; Stasko, J. Toward a deeper understanding of the role of interaction in information visualization. IEEE Trans. Vis. Comput. Graph. 2007, 13, 1224–1231. [Google Scholar] [CrossRef] [PubMed]
- Hasser, C.J.; Goldenberg, A.S.; Martin, K.M.; Rosenberg, L.B. User performance in a GUI pointing task with a low-cost force-feedback computer mouse. In Proceedings of the ASME Dynamic Systems and Control Division, Anaheim, CA, USA, 15–20 November 1998; American Society of Mechanical Engineers: New York, NY, USA, 1998; Volume 121, pp. 151–156. [Google Scholar]
- Menelas, B.; Picinalli, L.; Katz, B.F.; Bourdot, P. Audio haptic feedbacks for an acquisition task in a multi-target context. In Proceedings of the 3D User Interfaces (3DUI), 2010 IEEE Symposium on IEEE, Waltham, MA, USA, 20–21 March 2010; pp. 51–54. [Google Scholar]
- Menelas, B.A.J.; Picinali, L.; Bourdot, P.; Katz, B.F. Non-visual identification, localization, and selection of entities of interest in a 3D environment. J. Multimodal User Interfaces 2014, 8, 243–256. [Google Scholar] [CrossRef]
- Pao, L.Y.; Lawrence, D.A. Synergistic visual/haptic computer interfaces. In Proceedings of the Japan/USA/Vietnam Workshop on Research and Education in Systems, Computation, and Control Engineering, Hanoi, Vietnam, May 1998; pp. 155–162. [Google Scholar]
- Van Reimersdahl, T.; Bley, F.; Kuhlen, T.; Bischof, C.H. Haptic rendering techniques for the interactive exploration of CFD datasets in virtual environments. In Proceedings of the Workshop on Virtual Environments, Zurich, Switzerland, 22–23 May 2003; ACM: New York, NY, USA, 2003; pp. 241–246. [Google Scholar]
- Mark, W.R.; Randolph, S.C.; Finch, M.; Van Verth, J.M.; Taylor, R.M., II. Adding force feedback to graphics systems: Issues and solutions. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, 4–9 August 1996; ACM: New York, NY, USA, 1996; pp. 447–452. [Google Scholar]
- Avila, R.S.; Sobierajski, L.M. A haptic interaction method for volume visualization. In Proceedings of the IEEE Visualization’96, San Francisco, CA, USA, 27 October–1 November 1996; pp. 197–204. [Google Scholar]
- Adachi, Y.; Kumano, T.; Ogino, K. Intermediate representation for stiff virtual objects. In Proceedings of the Virtual Reality Annual International Symposium, Research Triangle Park, NC, USA, 11–15 March 1995; pp. 203–210. [Google Scholar]
- Menelas, B.; Fauvet, N.; Ammi, M.; Bourdot, P. Direct haptic rendering for large data sets with high gradients. In Proceedings of the 2008 Ambi-Sys Workshop on Haptic User Interfaces in Ambient Media Systems, Quebec City, QC, Canada, 11–14 February 2008; ICST: South Portland, ME, USA, 2008; p. 2. [Google Scholar]
- Menelas, B.; Ammi, M.; Bourdot, P. A flexible method for haptic rendering of isosurface from volumetric data. In Proceedings of the Haptics: Perception, Devices and Scenarios, Madrid, Spain, 10–13 June 2008; pp. 687–693. [Google Scholar]
- Beaudouin-Lafon, M. Designing interaction, not interfaces. In Proceedings of the Working Conference on Advanced Visual Interfaces, Gallipoli, Italy, 25–28 May 2004; ACM: New York, NY, USA, 2004; pp. 15–22. [Google Scholar]

{kind=link}
{kind=link}
| The Soccer Ball | Technical Gestures |
|---|---|
| wet | kick |
| hard | juggle |
| rough | feint |
| smooth | back heel |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Menelas, B.-A.J.; Benaoudia, R.S. Use of Haptics to Promote Learning Outcomes in Serious Games. Multimodal Technol. Interact. 2017, 1, 31. https://doi.org/10.3390/mti1040031
Menelas B-AJ, Benaoudia RS. Use of Haptics to Promote Learning Outcomes in Serious Games. Multimodal Technologies and Interaction. 2017; 1(4):31. https://doi.org/10.3390/mti1040031
Chicago/Turabian StyleMenelas, Bob-Antoine J., and Rabah Syphax Benaoudia. 2017. "Use of Haptics to Promote Learning Outcomes in Serious Games" Multimodal Technologies and Interaction 1, no. 4: 31. https://doi.org/10.3390/mti1040031
APA StyleMenelas, B.-A. J., & Benaoudia, R. S. (2017). Use of Haptics to Promote Learning Outcomes in Serious Games. Multimodal Technologies and Interaction, 1(4), 31. https://doi.org/10.3390/mti1040031