2.1. Development of Permeability Measure
For the purpose of this research, the frontage permeability is understood as the property of these frontiers that allows interpersonal interactions between the spaces delimited by them; namely the public space, that is, the street and the private space, that is, the plot. These interactions may be visual—people on the streets may or may not see what goes on inside the plot, and vice versa—as well as physical—people may or may not cross the border between public and private space defined by the frontage.
These interactions need to be understood bearing in mind that they have a certain inequality. The public space is, by definition, commonly open and accessible to all people, while the plot, often being privately owned, tends to have controlled visibility and access. The frontage partition, for example, may purposefully conceal the view from the street to the plot, but not the opposite way around. In the same way, doors and gates aim at controlling the access to the plot, rather than the exit to the public space. The study looks at the public–private interface from the public space perspective.
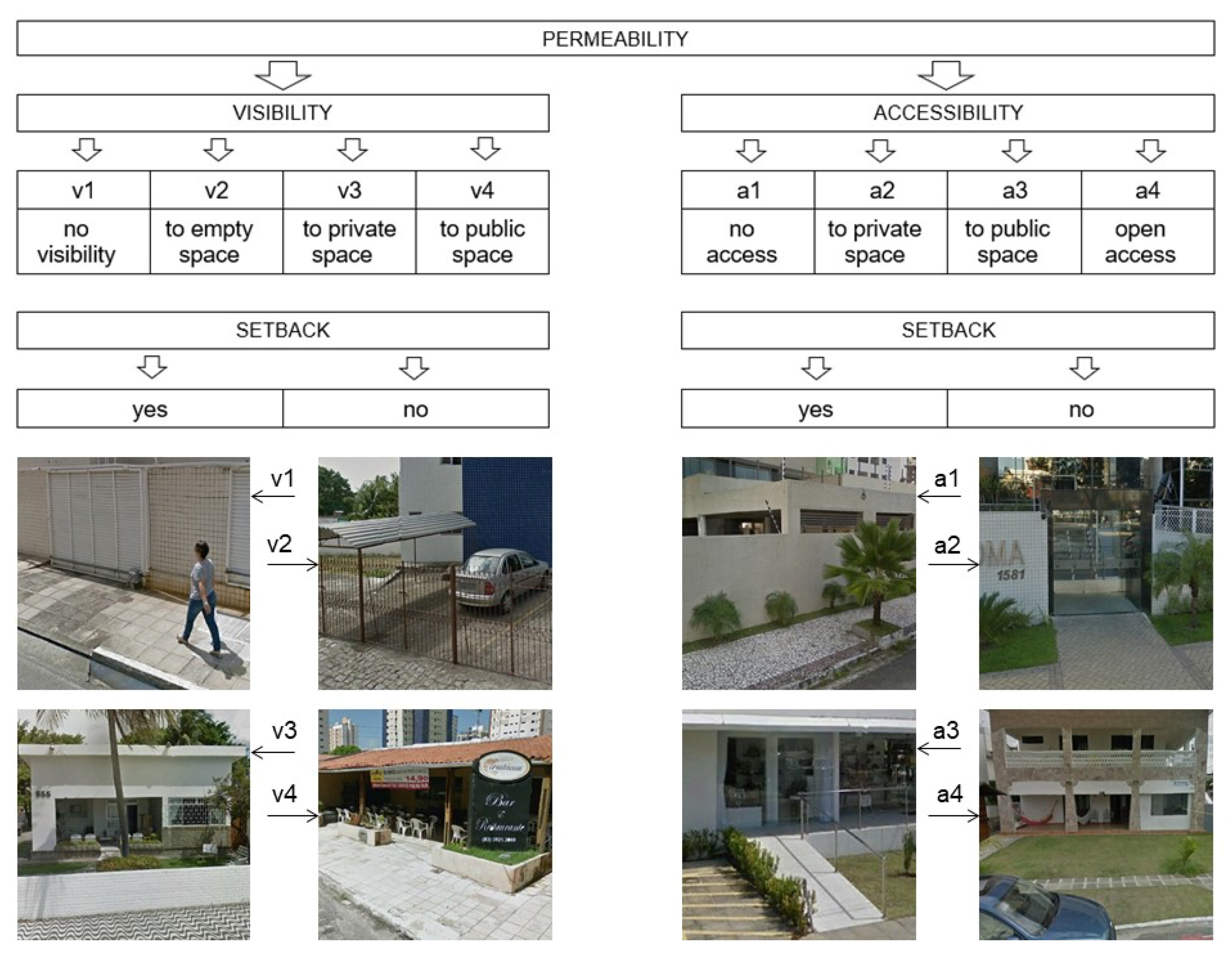
In the proposed method, the permeability measure was divided into two variables: (a) visibility—the frontage property that allows people to see through it; and (b) accessibility—the frontage property that allows people to pass through it. These variables are measured separately, as they are not necessarily correlated. For instance, a transparent frontage may not allow movement through it, as well as a high and opaque frontage can allow access to users, if it is a gate.
The visibility and accessibility measures were defined by combining a quantitative measure—the degree of how visually or physically permeable the frontage is—and a qualitative classification of the type of space that is visible or accessible. This type refers to a socio-spatial qualification according to the land use—if it is a public or private space, occupied, underutilized, or empty. This differentiation is important as land use may encourage or, conversely, discourage the interaction between street and lot, interfering in its contribution to urban vitality. The visibility to a vacant plot, for example, presumably does not contribute to the quality, safety, or vitality of the public space adjacent to it. Urban voids make the street environment more desolate, abandoned, and monotonous, thus less attractive and safe for people. Conversely, the visibility or access to a restaurant or to a store is a factor of people attraction.
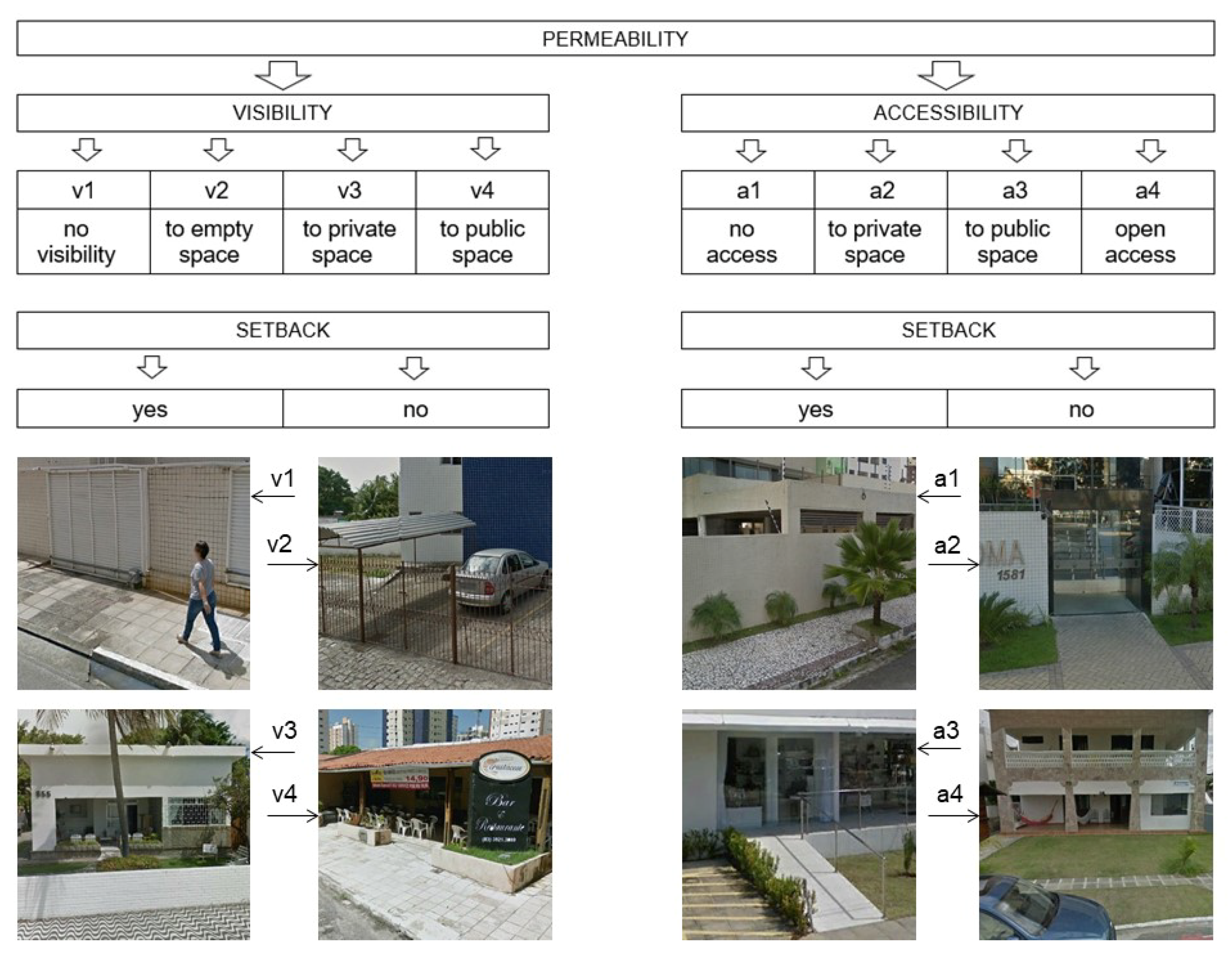
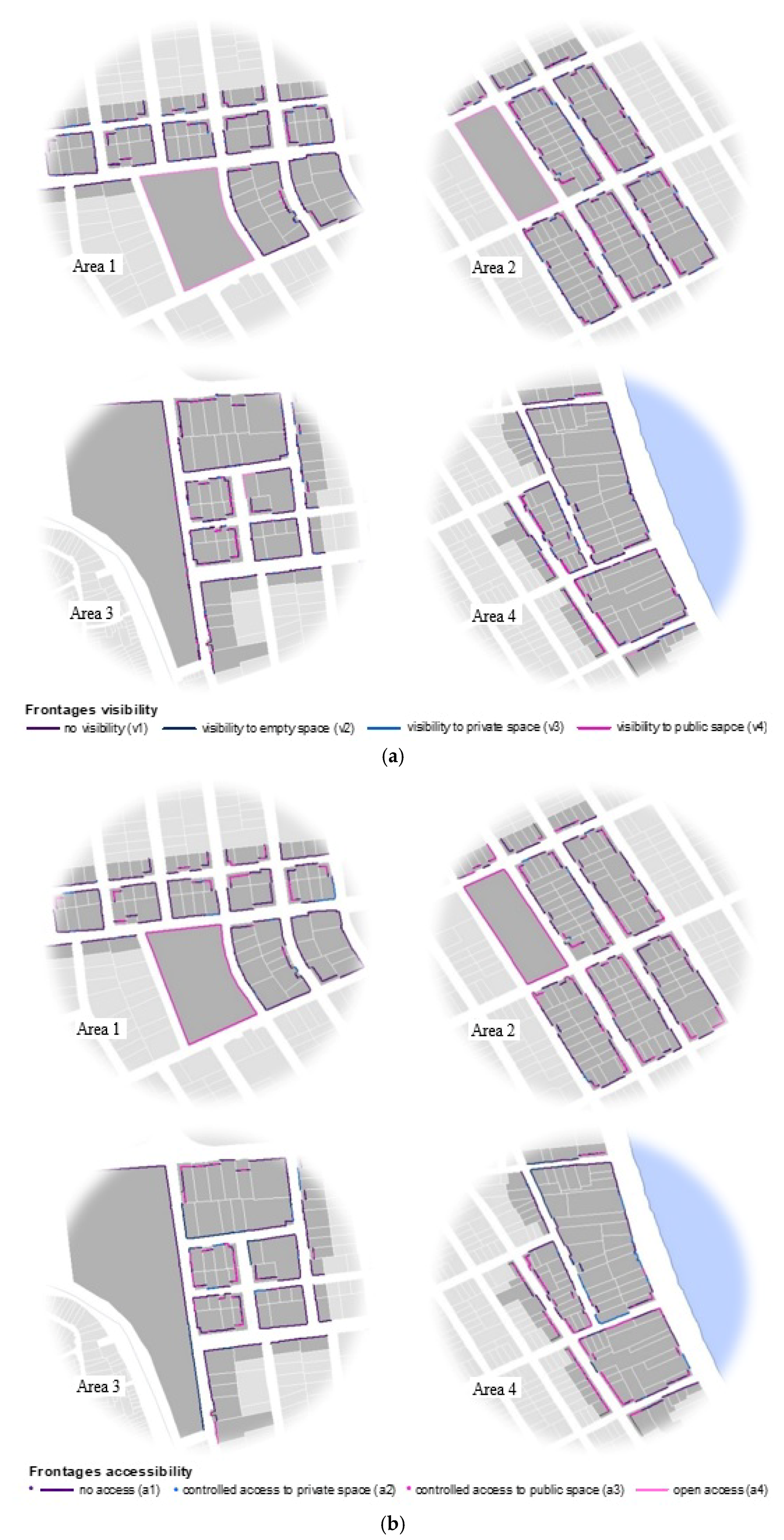
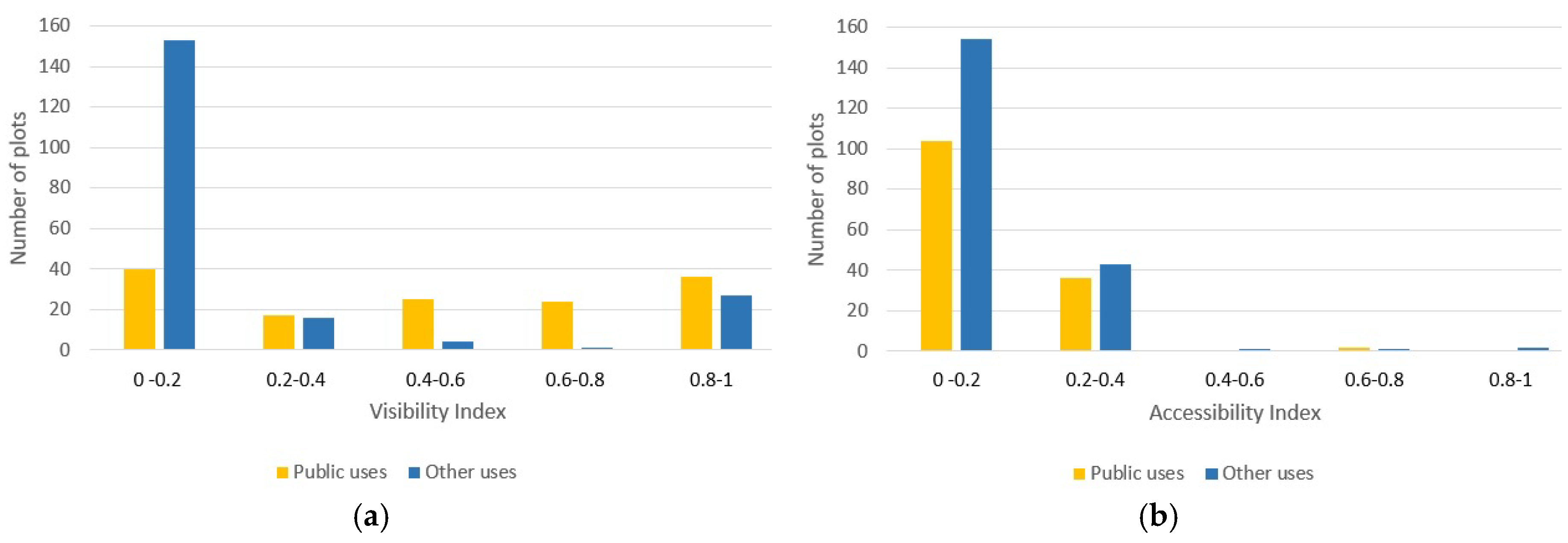
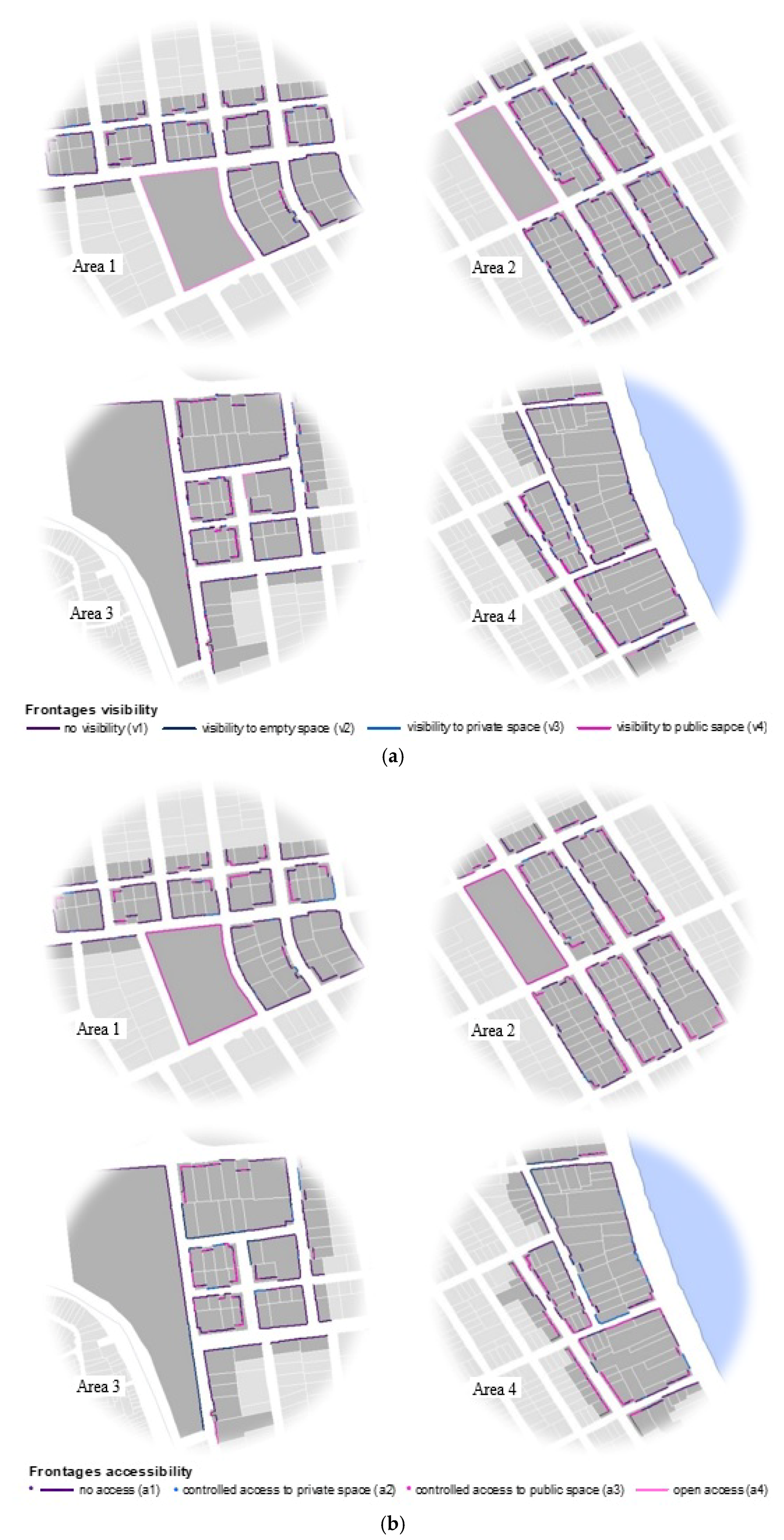
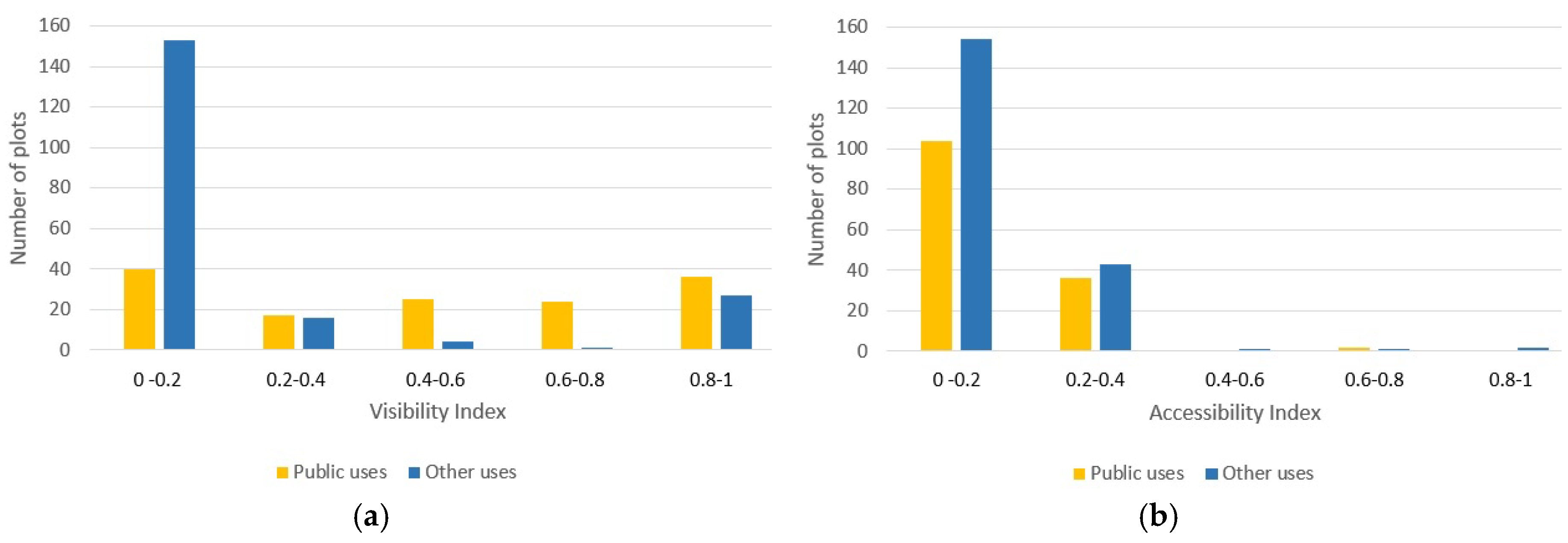
To measure the visibility variable, we defined four categories: (a) no visibility (v1); (b) visibility to an empty space (v2); (c) visibility to a private space (v3); and (d) visibility to a (semi-)public space (v4)—see
Scheme 1. The “empty space” class includes vacant plots, and residual and underutilized spaces, defined as follows: (a) vacant plots are the private plots without occupation and use; (b) residual spaces are small areas between buildings within plots, without defined function and idle; (c) underutilized spaces are those spaces whose uses are not proper for social interactions, such as closed or abandoned buildings, parking lots, and garages. The “private space” class comprises single-family and multifamily residential uses, while “(semi-)public space” encompasses all other public, semi-public, or collective uses: retail, services, and so on. This scale is based on the principle that the visibility to a (semi-)public space presents more potential to promote interaction between the street and the plot than that to a private space, which is usually more controlled and isolated. Likewise, visibility of a private space generates more potential interaction than visibility of an empty space, which in scale, only surpasses the no visibility condition.
The definition of land use, and the concepts and degrees of public–private are much more diffuse and complex than this categorization. However, we tried to avoid a model with too detailed categories—and thereby non-generic—or with too abstract ones—and thereby too broad. The developed method seems to be effective enough to differentiate the basic types of land use, and economic enough to not be too complicated.
The accessibility variable measure is also based on a four-category scale: (a) no access (a1); (b) controlled access to a private space (a2); (c) controlled access to a (semi-)public space (a3); and (d) open access (a4)—see
Scheme 1. It was opportune to differentiate the controlled access—that with doors or gates—from open access. It is not necessary to qualify the plot use when an open access is found. Prevailed its quality of being devoid of barriers, it does not matter if the open access is to a public or private space, or even to an empty one. An open access to a private or semi-public space works as an urban incubator that promotes the convergence between street and plot spaces. When it is directed to an empty space, it can promote space occupation, as commonly seen in Brazilian cities where squares are often lacking, as well as public equipment for leisure and sports. Open (with no walls) vacant plots are thus spontaneously converted by the population into football fields.
A “controlled access to empty space” category was not necessary. The entrances to closed buildings and the exclusive gates for cars were considered as part of the “no access” category (a1). In the first case (closed buildings), there is in fact no access. In the second case (parking lots and garages), there is a controlled access used only by vehicles, so it does not generate social interaction between public and private realms, that is, the street and the plot. The mixed-use gates, both for pedestrians and vehicles, were considered as controlled accesses, either in the a2 category (to a private use space) or in the a3 (to a (semi-)public space).
Another analyzed variable was the setback, observed when the barrier that delimits street and plot is recessed from the plot’s limit and a part of the private property is, so to speak, given to the public use. When a setback is present, depending on its use, it can have a positive effect by means of semi-public uses, generating gradations between public and private spaces, or a negative effect, by reinforcing the separation of these two realms with residual spaces. The following was verified: (a) the existence of the setback space; (b) its dimension; and (c) its eventual occupation. The setback dimension was considered as the average distance between the plot’s limit with the street and the barrier built inside the plot. When this distance was less than two meters, the setback was disregarded. It should be noted that the building with setbacks, that is, the building located in the center of the plot and surrounded by walls, is common in Brazilian cities. In these cases, the building does not define permeability, but rather the walls that surround it, which are the physical elements that delimit the public and private realms.
Once the variables and their categories of analysis were defined, frontage mapping was conducted in the chosen areas. Some measurement parameters were established. Visibility values were registered based on the average eye height of a pedestrian (about 1.60 m) that walks on the sidewalk level. Based on the possibility of visual interaction with the ground level of the plot, an opaque barrier of 1.70 m or higher was included in the “no visibility” category. In situations of discontinuous vision, because of, for instance, the presence of fences, interspersed posts, or hollow bricks, the visibility was considered existent.
In accessibility, the “open access” category was set for situations with no barriers higher than 40 cm from the sidewalk level. Forty centimeters is the average height of a seat and of an adult knee, so it is supposed to be easier to pass over an obstacle of that height. Obviously, a 50-cm high wall can also be crossed, but the height limit to “open access” was defined considering the intention of territory demarcation. Space accessibility is not only about being able to cross or enter, but also about permission to do so [
13].
The Google Street (with updated data from September 2017) and Google Earth tools were used for data gathering. Using the images on these online platforms, the different components of each plot frontage (e.g., wall, gate, fence) were verified. Their lengths were recorded in meters (recesses were considered irrelevant and thus not measured), as well as their different conditions of visibility, accessibility, and setback. This level of detail is relevant, as the frontage of a plot can be very heterogeneous along its length. In that case, assigning only one accessibility, visibility, or setback value to it would not express its actual condition.
The initial mapping of measurements was performed on AutoCAD 2017 software, using DWG files originating from georeferenced files. For the geometric representation of each frontage component, lines were used as entities with attributes according to
Scheme 1. This means that, besides a length value, each line has a visibility category (v1, v2, v3, or v4) and an accessibility one (a1, a2, a3, or a4), as well as, in case of a setback, its dimension and use. The DWG files were then exported as vector images to the ArcGIS 10.2 software, which was used for the final mapping, processing, and analysis of the data.
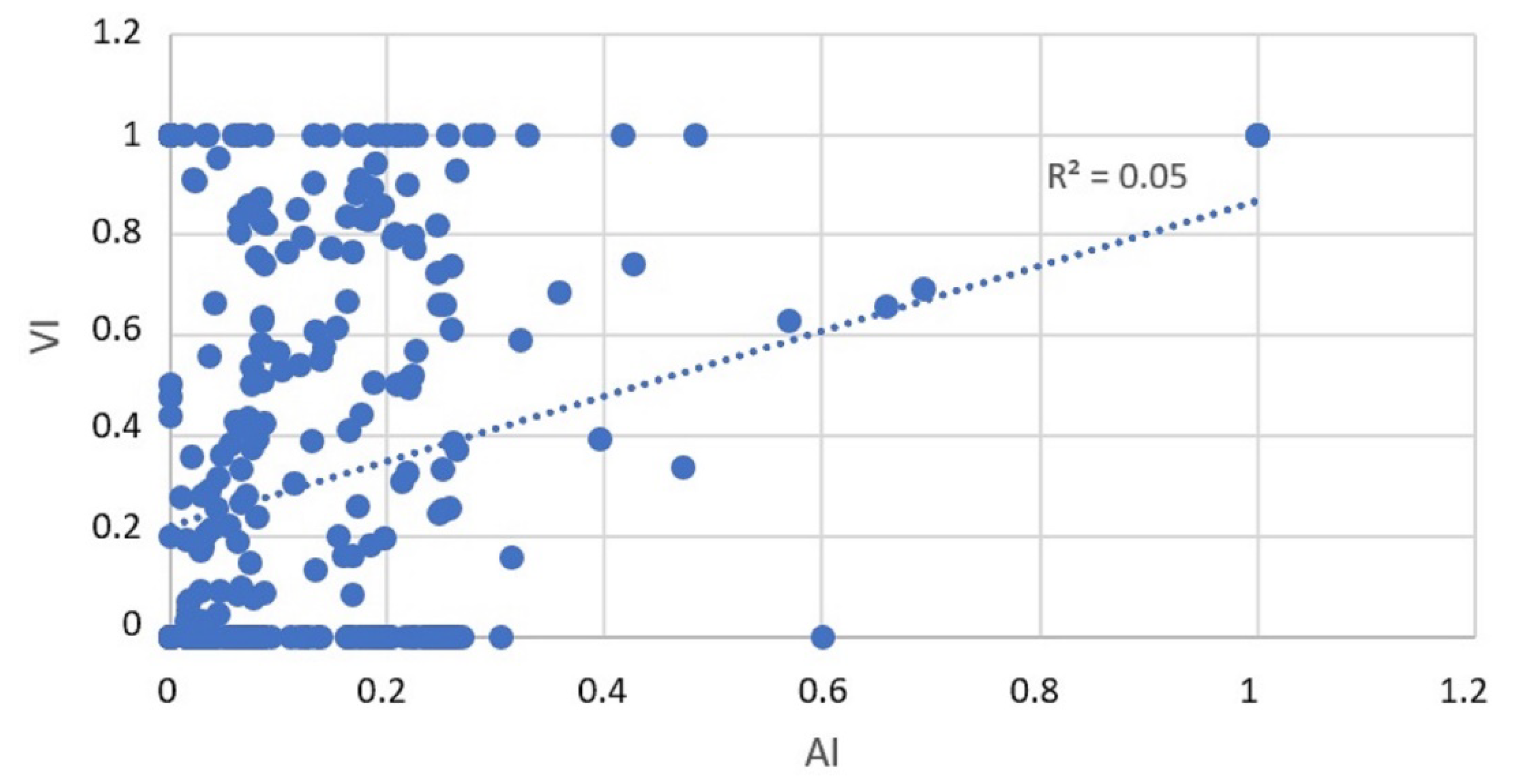
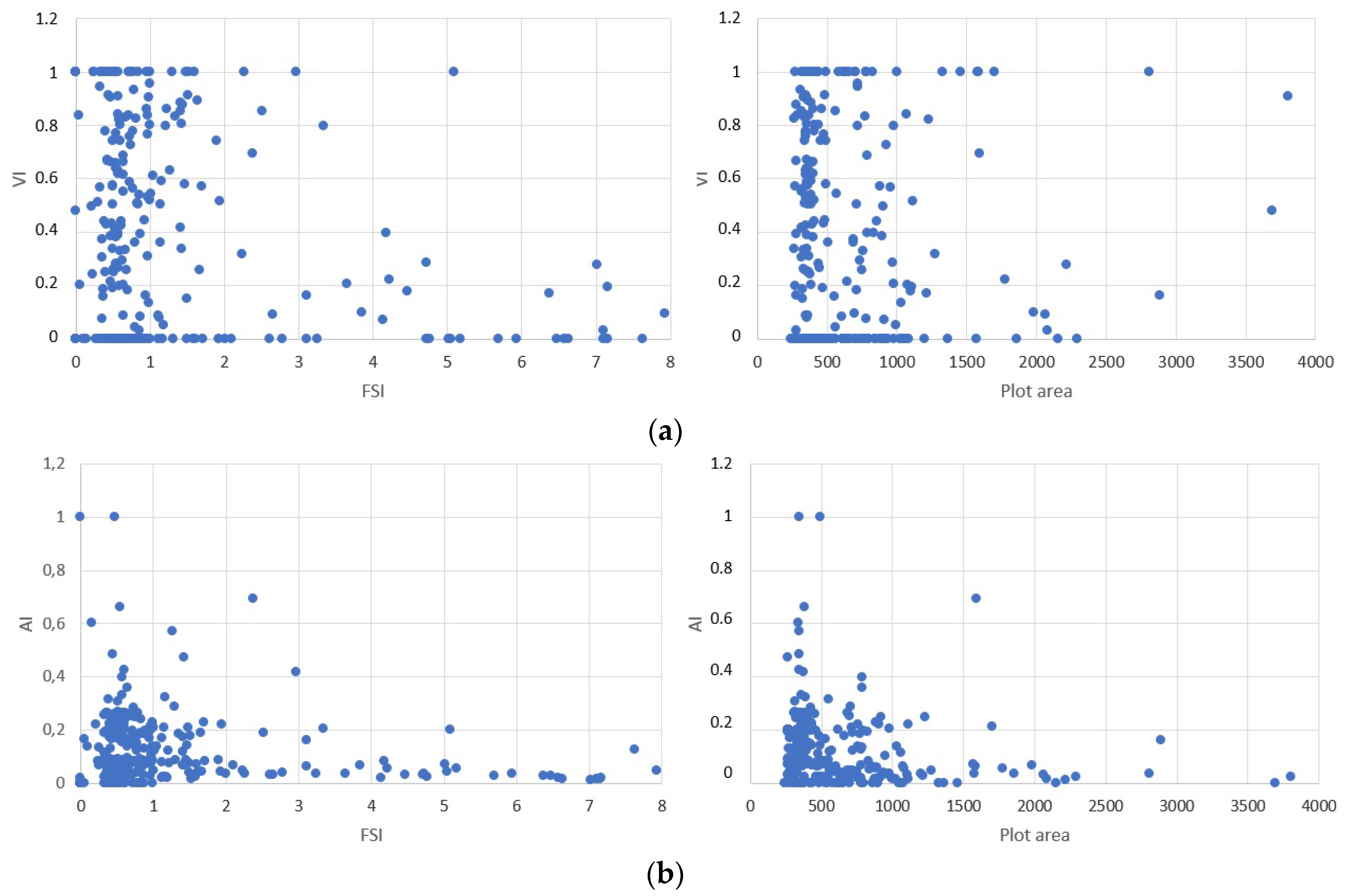
Various indexes expressing the frontage permeability were developed based on the total length of each visibility (v1, v2, v3, and v4) and accessibility category (a1, a2, a3, and a4) per plot. The indexes were calculated as follows:
where:
VI = Visibility Index;
v1 = frontage length with no visibility;
v2 = frontage length with visibility to empty space;
v3 = frontage length with visibility to private space;
v4 = frontage length with visibility to (semi-)public space;
AI = Accessibility Index;
a1 = frontage length with no access;
a2 = frontage length with controlled access to private space;
a3 = frontage length with controlled access to (semi-)public space;
a4 = frontage length with open access.
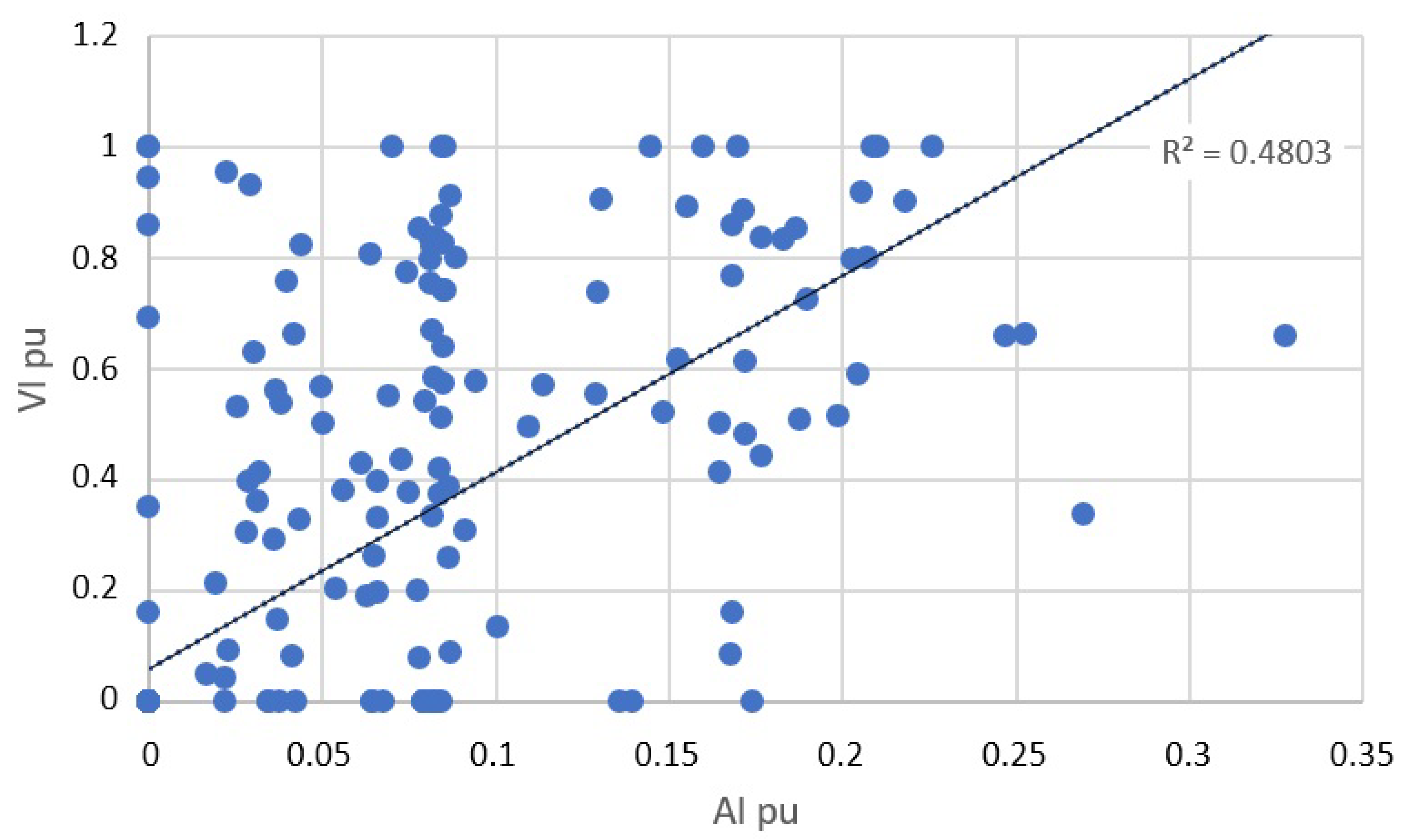
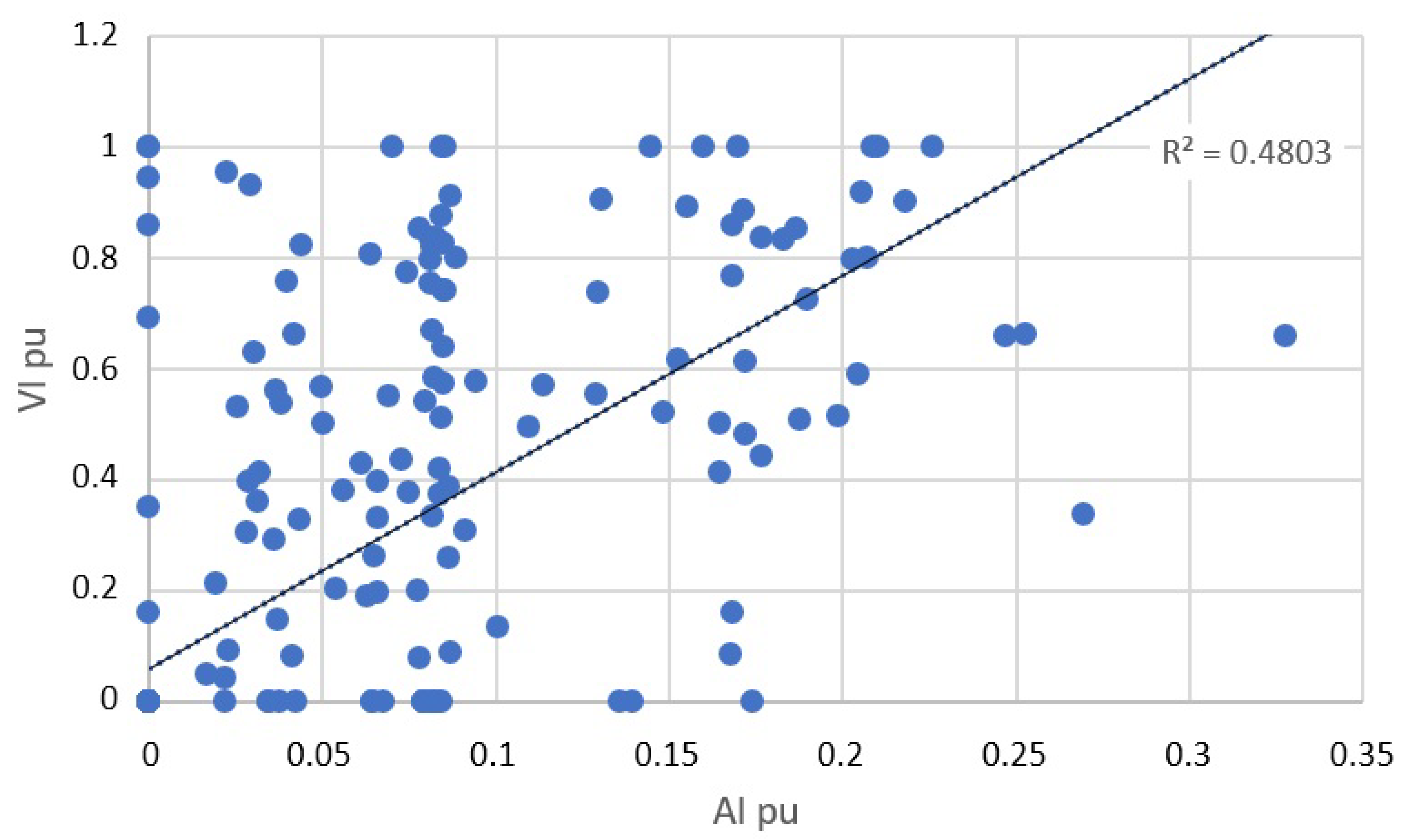
Besides these main indexes, some sub-indexes were developed based on certain categories of visibility and accessibility, so that they can be assessed separately. To calculate the permeability indexes to (semi-)public spaces, the following equations were used:
where:
VIpu = Visibility Index to (semi-)public space;
AIpu = Accessibility Index to (semi-)public space;
Na3 = number of controlled accesses to (semi-)public space.
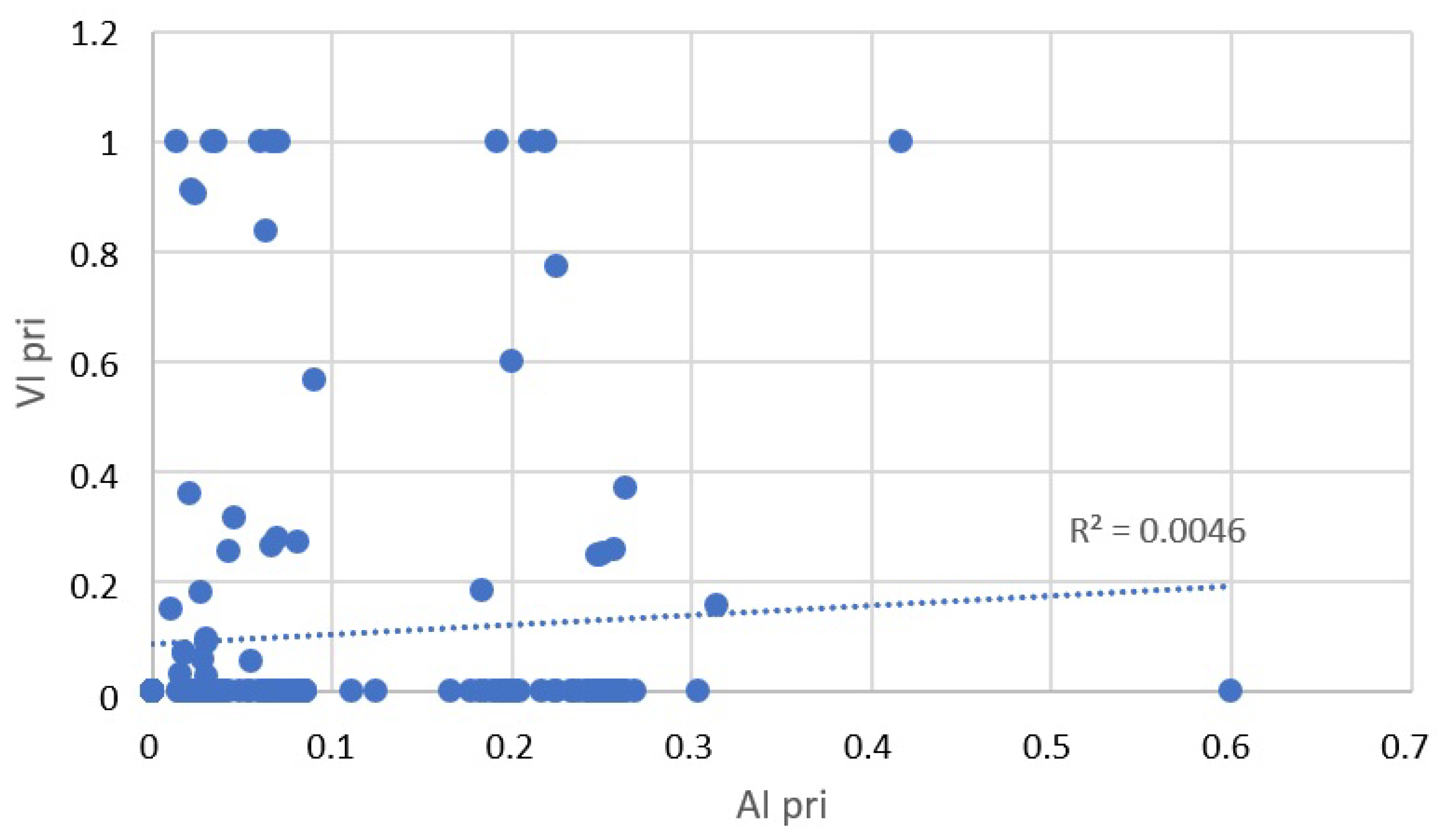
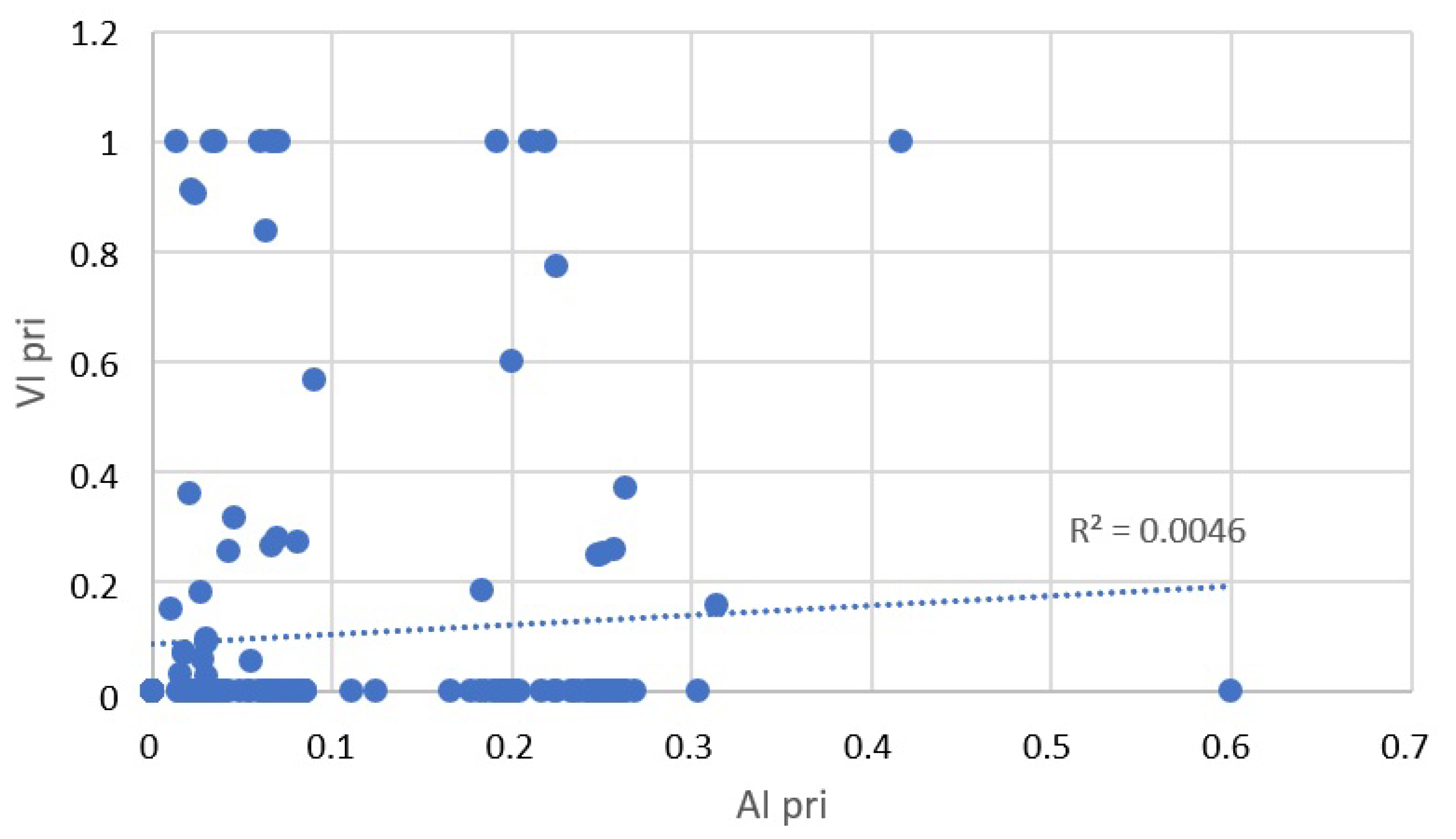
Indexes were also developed to measure permeability to both (semi-)public and private space, as well as an open access index, using the following equations:
where:
VIpri pu = Visibility Index to private and (semi-)public space;
AIpri pu = Accessibility Index to private and (semi-)public space;
Na2 = number of controlled accesses to private space;
AIop = Accessibility Index for open access.
In Equations (4) and (6), the numerator indicates the number of accesses, not length. The quantity of accesses seems to be more effective for the assessment of accessibility to specific spaces according to use (that is, (semi-)public and private spaces) than the entrances length.
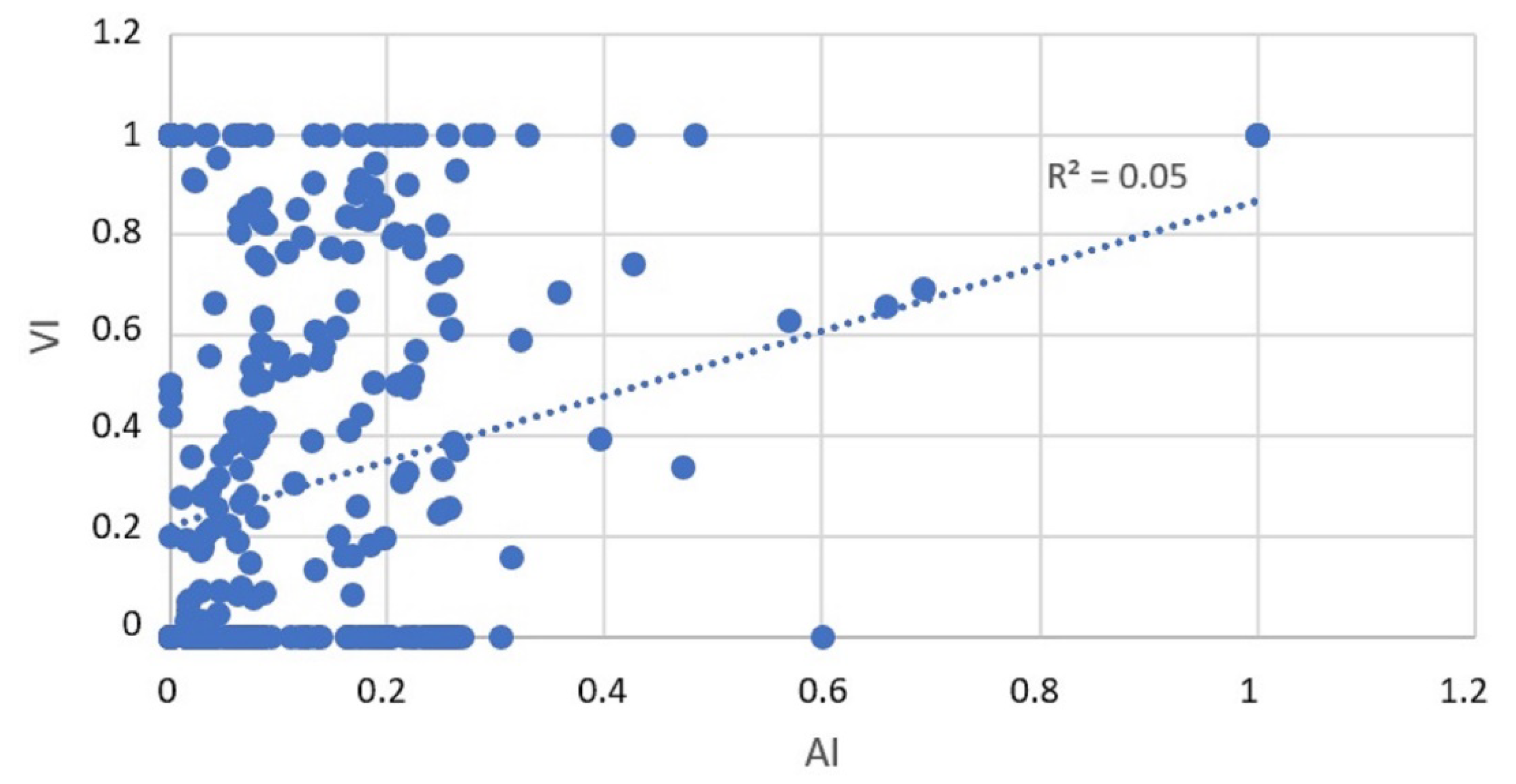
Equation (3) can demonstrate the potential urban diversity, as it registers the Visibility Index for all non-private uses. Equation (5) can express Jacob’s “eyes on the street” [
2], as it registers the Visibility Index for all private and (semi-)public uses. Therefore, it includes spaces whose uses can contribute to the natural surveillance of the streets (assuming that visibility also occurs from the plot interior to its exterior).
The accessibility sub-indexes to (semi-)public space (AIpu) and to both private and (semi-)public space (AIpri pu) are important for describing accessibility to spaces whose uses are conducive to social interactions between streets and plots.
The open access index (AIop) records the proportion of spaces with no barriers between the street and the plot, that is, the convergence spaces that contribute to the interactions between streets and plots.
All indexes were calculated in Microsoft Office Excel tables.
2.2. Measures of Density and Plot Sizes
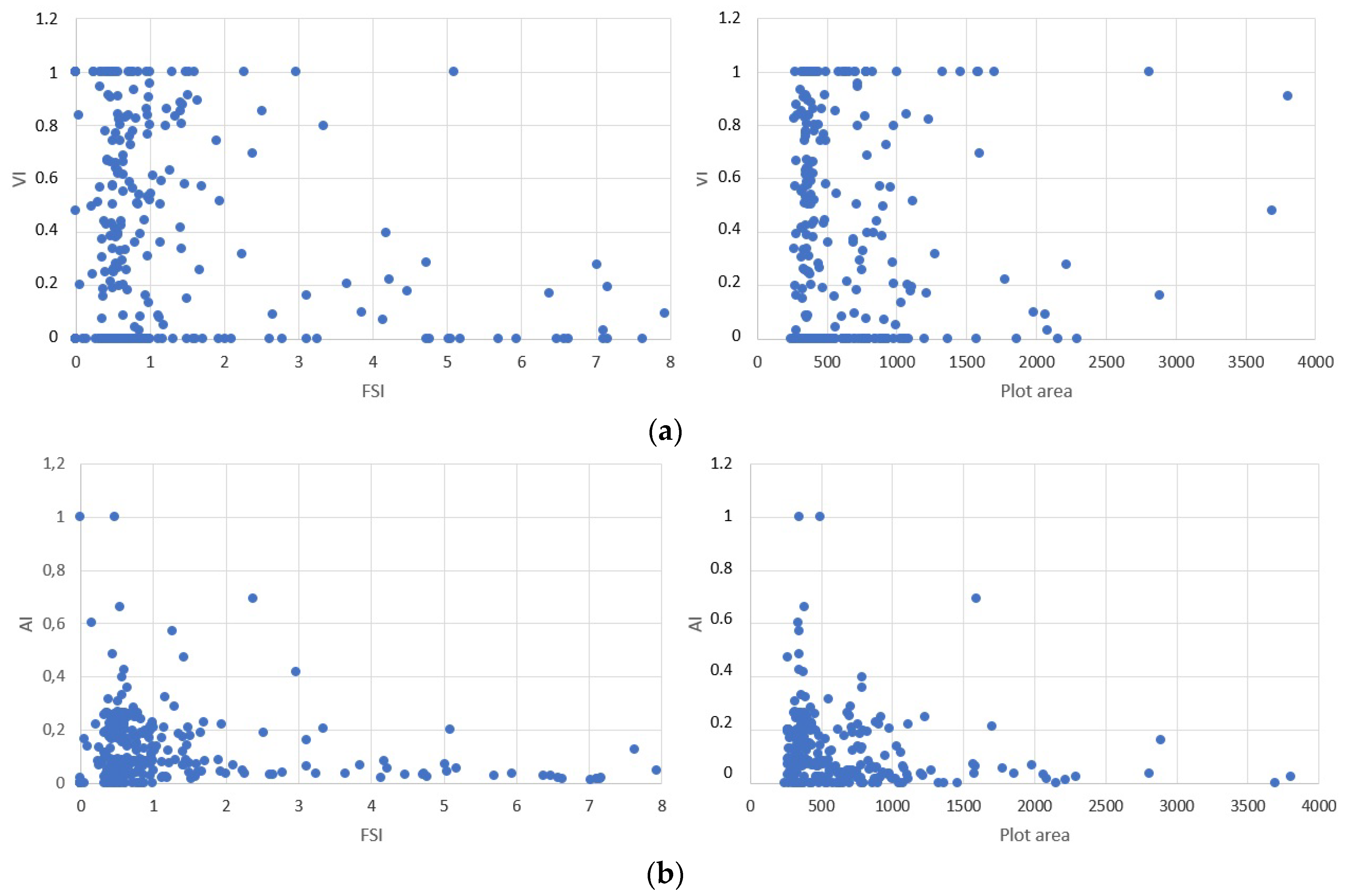
In order to test the hypothesis, the permeability indexes were correlated to the local density, plot size, and land use.
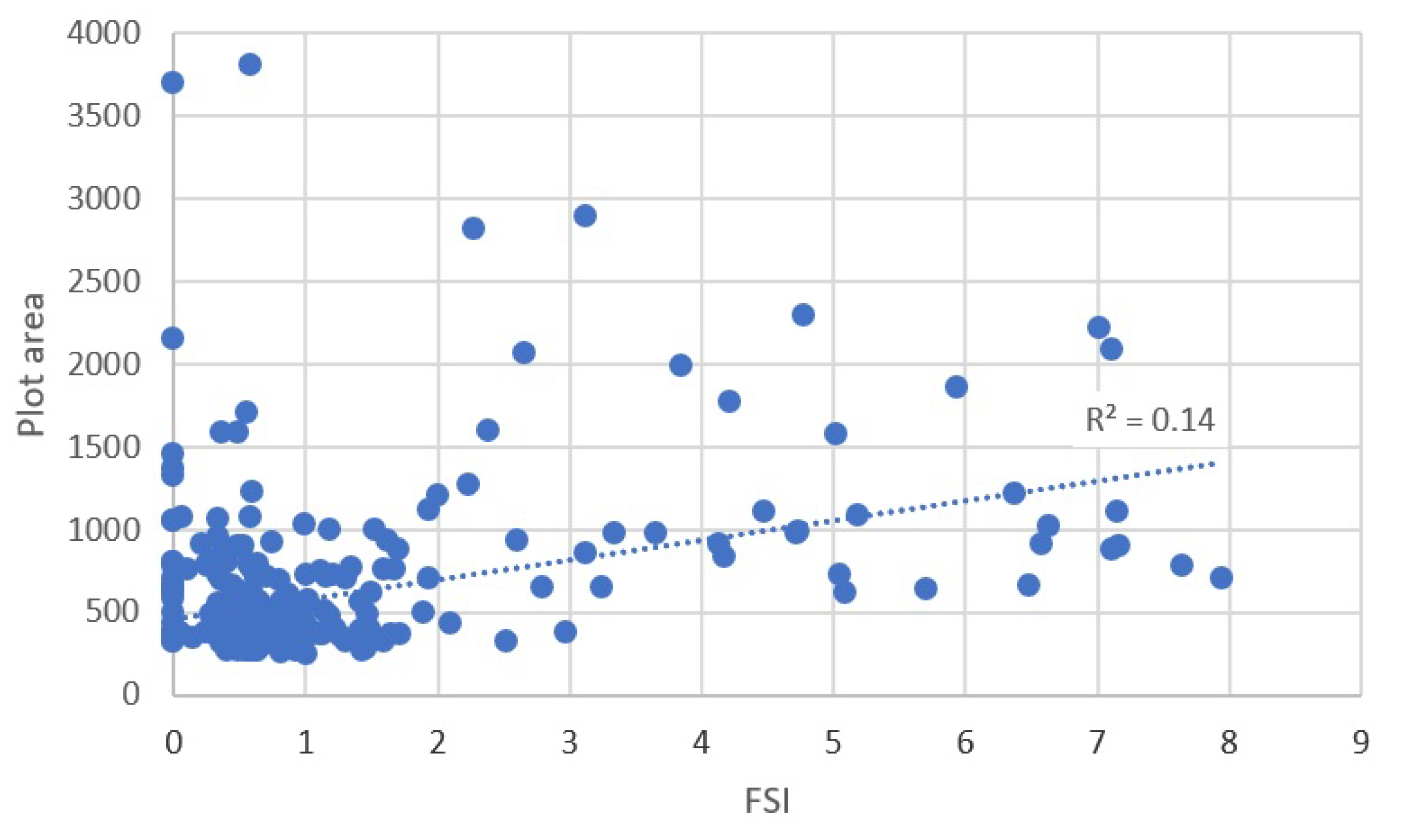
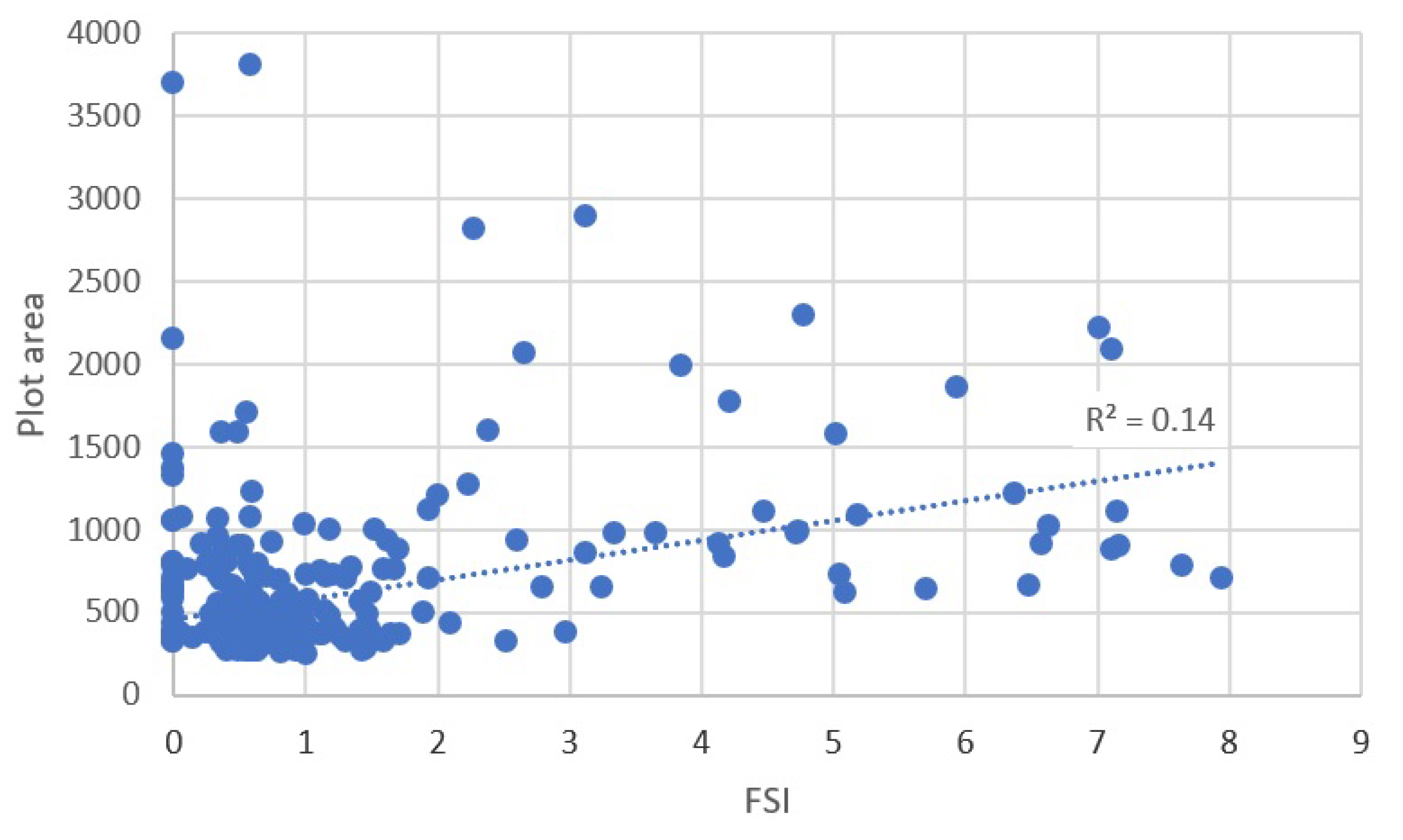
For density measures, the Spacematrix method was used [
14]. It calculates the built density using multiple density indexes including Floor Space Index (FSI), also referred to as Floor Area Ratio (FAR) - which is calculated as the ratio between gross floor area and the base land area - and Ground Space Index (GSI), also referred to as Coverage, which is calculated as the ratio between the building footprint and the base land area. Together, these multiple density indexes have shown to effectively describe building types. The results are represented in diagrams that synthesize various density characteristics of the analyzed areas and classify the building types found.
The data on gross floor area and plot area were obtained from the registry of the municipal government of João Pessoa. These data presented inconsistencies and errors, and were outdated in some aspects. To overcome these inconsistencies, a three-step analytical procedure was developed. Firstly, a sampling of typical blocks and plots of the case study areas was statistically calculated. Secondly, the gross floor area values of the referred set were manually recalculated and compared with those obtained from the registry. As a result of this procedure, we could detect the most frequent error patterns and choose the plot types whose floor area should be recalculated manually. Thirdly, the plot area values were recalculated automatically on ArcGIS 10.2 software, based on each plot’s cartographic geometry. Once the gross floor area and the plot area were checked and calibrated, we were able to obtain a more reliable FSI.
The measures related to the plot size were based on Bobkova et al. [
15], who develops morphological measures of plot systems, capturing size; openness and compactness; and configurational measures, such as accessible number of plots and accessible diversity of plots, using the Place Syntax Tool (PST). PST is a plug-in tool for QGIS that uses Space Syntax analysis for measuring the accessibility through the street to different contents of urban space (e.g., density or plot area), rather than the accessibility of the streets themselves. The PST measures can be said to be closer to the cognitive experience of a person walking through the urban space, and his or her perception of variations in densities, plot sizes, types of buildings, and so on. [
16,
17].
The local measurements in the test areas were combined with configurational measures at various scales, using Space Syntax [
18] network centrality measures integration and choice (also referred to as closeness centrality and betweeness centrality, respectively) on a segment map. With the segment map, it is applied the angular analysis [
19], which differs from the axial one because it can use not only topological measures, but also angular (geometric) and metric measures, within a stipulated radius. The angular analysis improves the axial representation assumption that people walk in a straight line, by assuming that people walk in a straight line, making the path with the least angular deviation. Thus, it considers the angle between the streets to weight the topological distance. The measures were performed at a range of scales: radii 500 m, 800 m, 1 km, 2 km, 3 km, 5 km, and global (capturing the whole city); and in the topo-geometric radii r3, r7, and r12. With this range of scales, it was possible to verify the effects of the network from different scalar perspectives. On the local scale, the network analysis informs us which streets are more integrated on that level as the global analysis gives us the understanding of how streets perform on city scale. One street can be well integrated locally, but not globally or vice versa. Various studies have shown that the most vital urban areas tend to be where streets have high centrality values with both high and low radii. [
20,
21]
Furthermore, accessible density and accessible number of plots were measured at various scales (500 m, 800 m, 1 km, 2 km, 3 km, 5 km, walking distance) using PST [
16,
17].
2.3. Pilot Study
The initial tests were performed in four selected areas of Manaíra district, in João Pessoa, Brasil. João Pessoa, the capital of Paraíba province in Brasil, has a population of 811,598 inhabitants in 211.5 km
2, and a population density of 3837 inhab/km
2. It is part of a 1.26 million inhabitants” metropolitan area (data from 2016–2017) [
22]. Manaíra integrates the high-income coastal subcenter of João Pessoa, which is one of its new centralities that resulted from an urban development process started in the 1970s [
23]. Subcenters result from urban expansion, concentrating retails and services in housing areas, in order to reduce users displacements in search of urban facilities. Unlike traditional centers, subcenters usually serve only parts of the city [
24].
Manaíra has 26,369 inhabitants in 2.42 km
2, with a high population density of 10,896 inhab/km
2. It is the city’s fourth most populated district (in absolute numbers) and the seventh most densely populated. It is also among the districts that present the highest built density levels [
25]. Integration and choice values indicate that Manaíra presents medium to high centrality and accessibility in local and global radii. The accessible density measure also shows high values in all radii. Therefore, Manaíra district presents economic-functional centrality (it is a subcenter with housing, retail, and services), demographic centrality (high population density), and morphological centrality (high FSIs, and, in configurational terms, high centrality, accessibility, and accessible density). Based on the Natural Movement theory [
1], we would expect high levels of pedestrian movement and activities, which, however, does not seem to be the case.
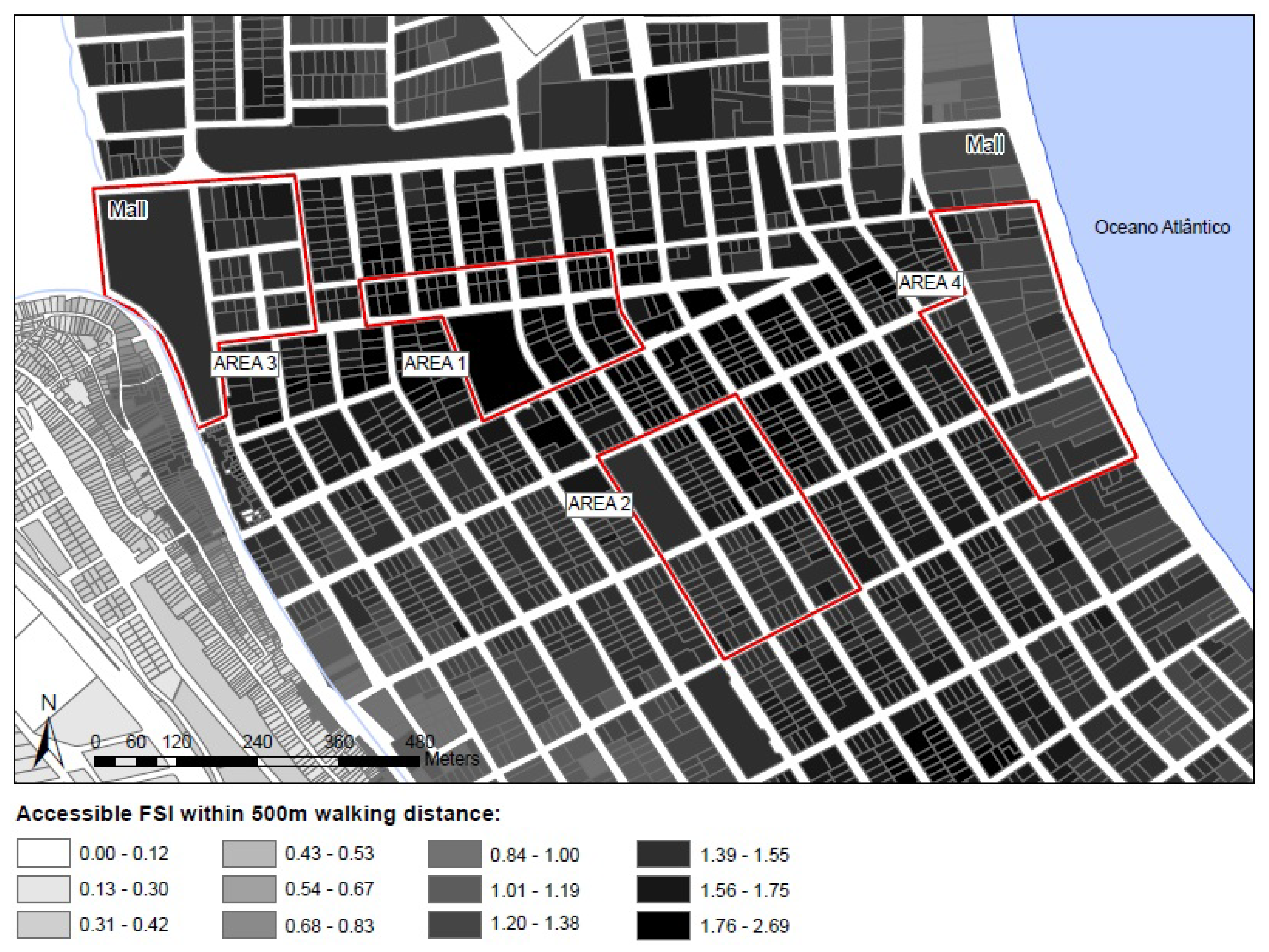
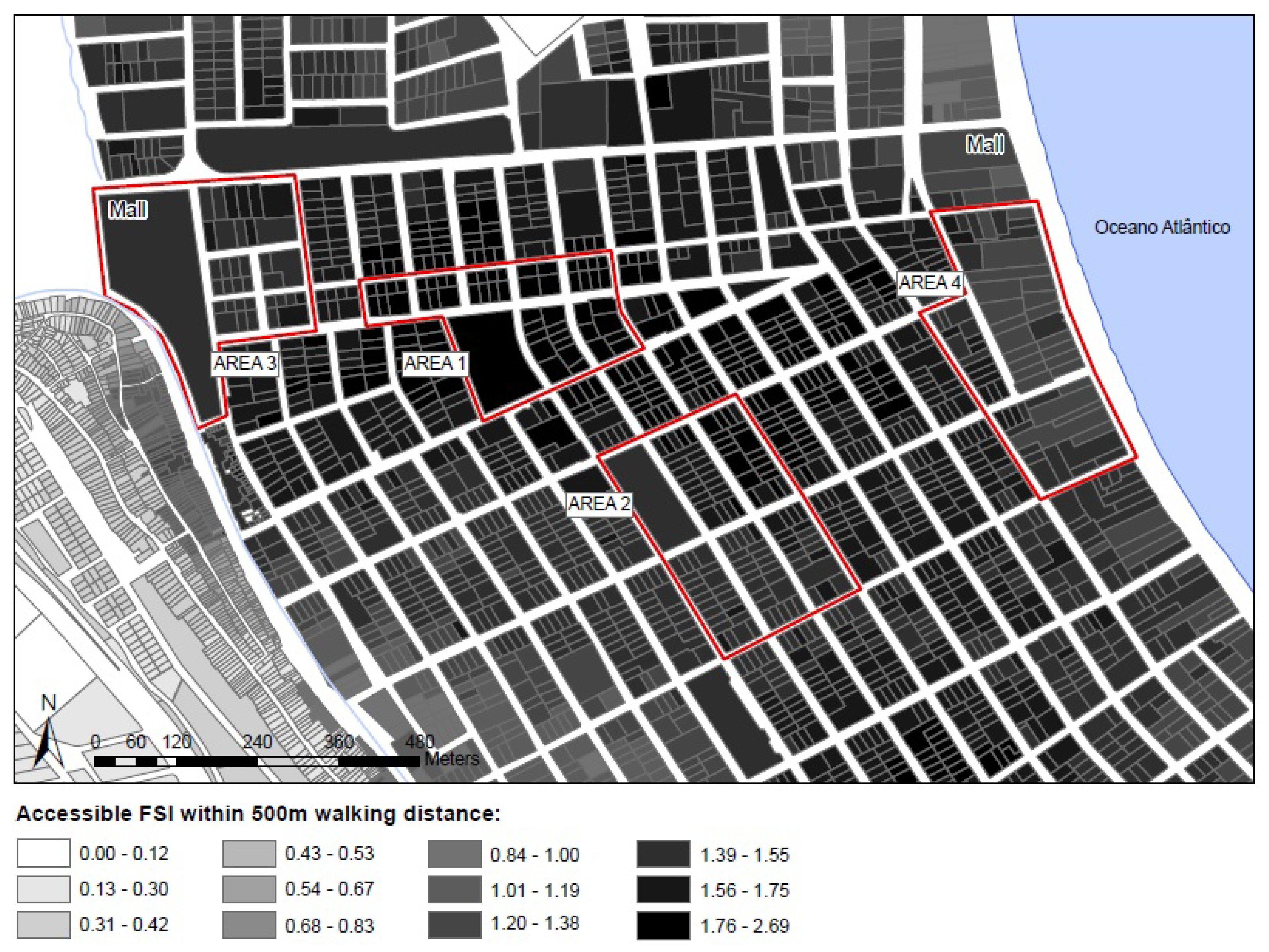
Four areas were selected for initial testing in Manaíra (see
Figure 1). Areas 1 and 2 present the highest values of accessible density in local radii (500 m and 800 m), within the district range. Areas 3 and 4 present medium to high accessible density values in the same radii, within the district range, and they are located next to malls that act as attractors.
As the testing areas have high centrality and accessible density, it would be expected to present urban vitality. The other variables (plot size and frontage permeability) that were measured may, according to our hypothesis, affect this relation between density, centrality, and urban life.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}