Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications




Abstract
:1. Introduction
2. Survey of Different Indoor Localization Technologies and UWB
2.1. Indoor Localization Systems
2.2. Ultra WideBand Systems
3. Experimental Setup and Evaluation
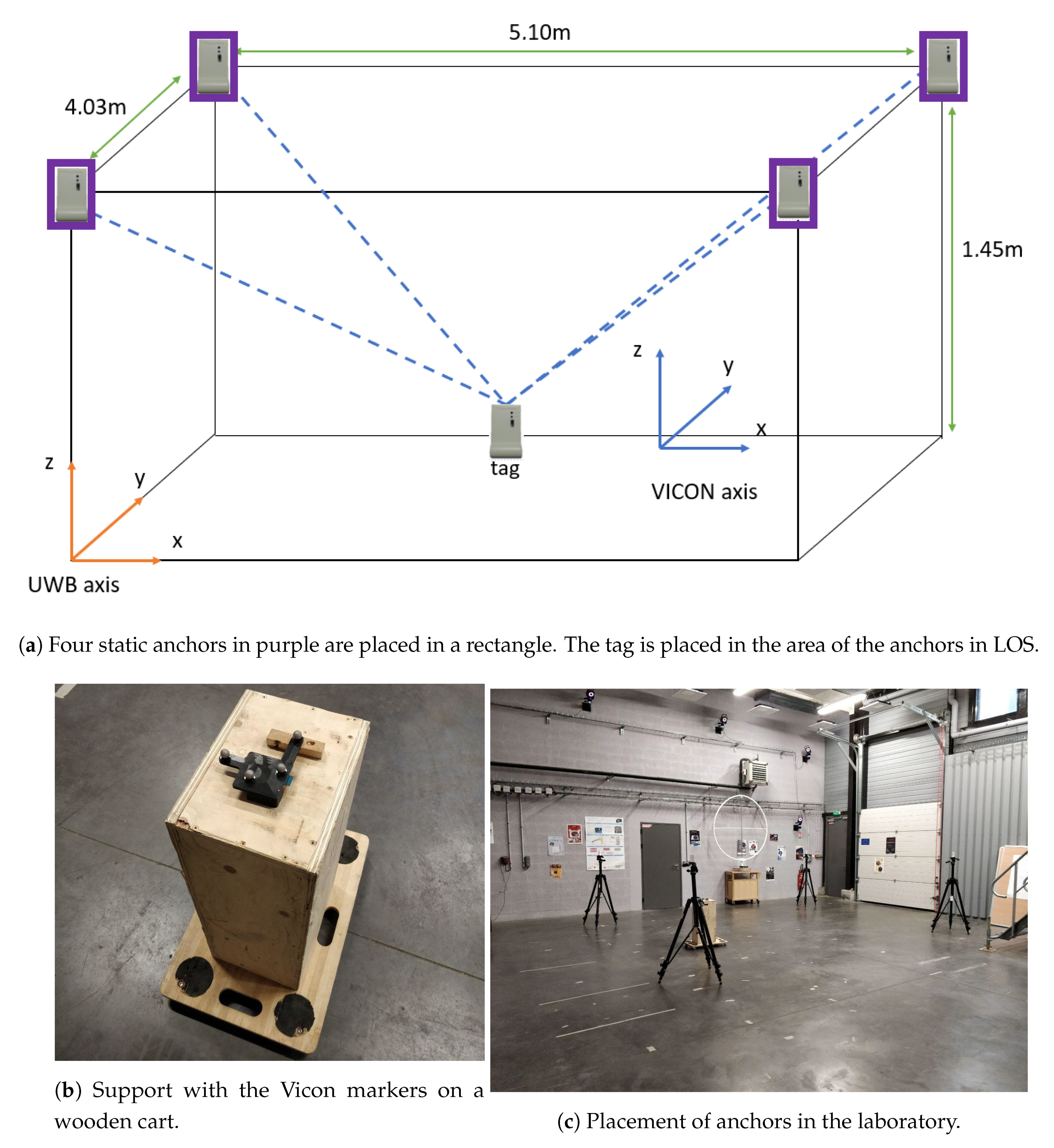
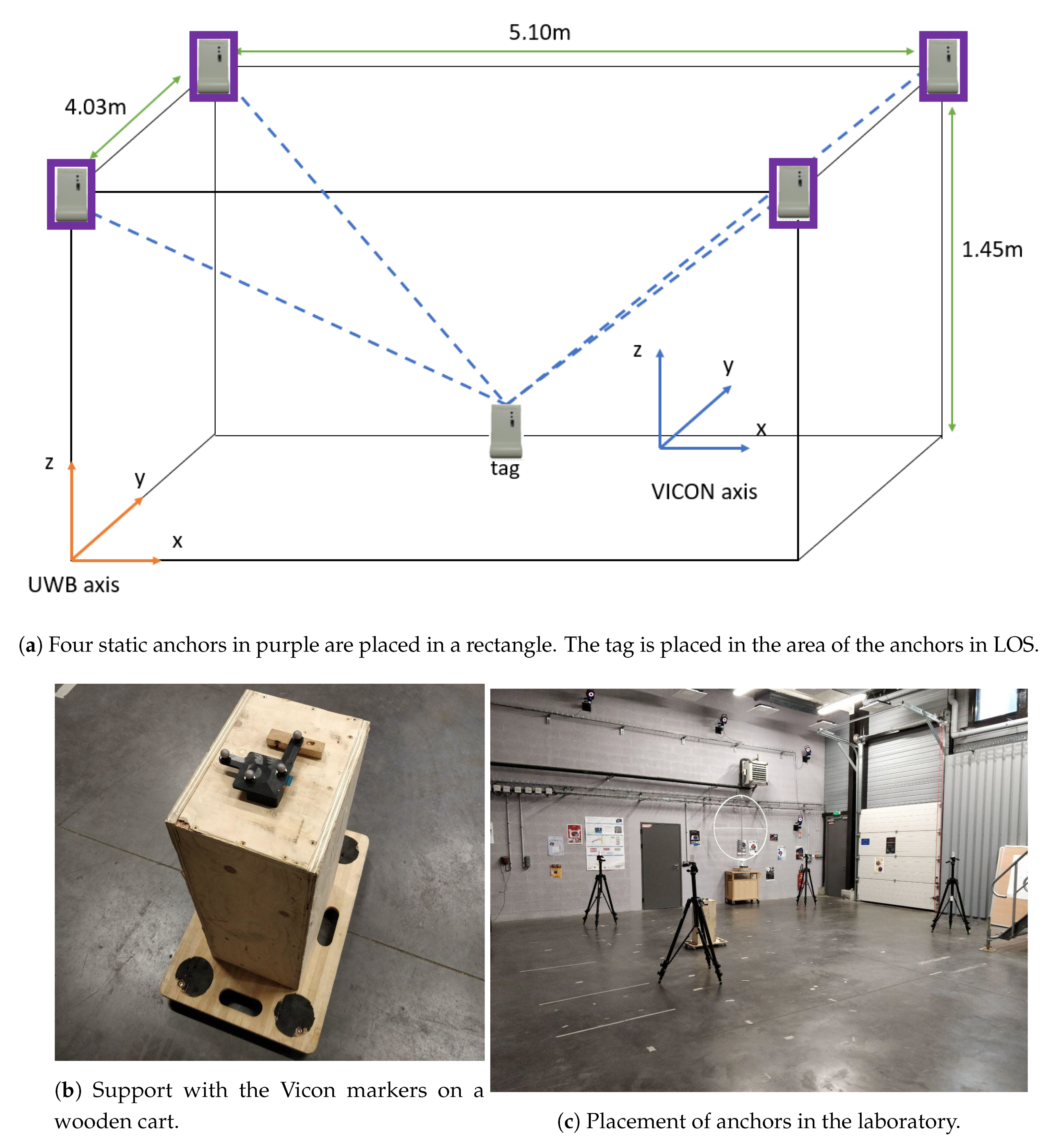
3.1. Experimental Setup
3.2. Method of Comparison
3.3. Calibration
3.4. Tests and Evaluation
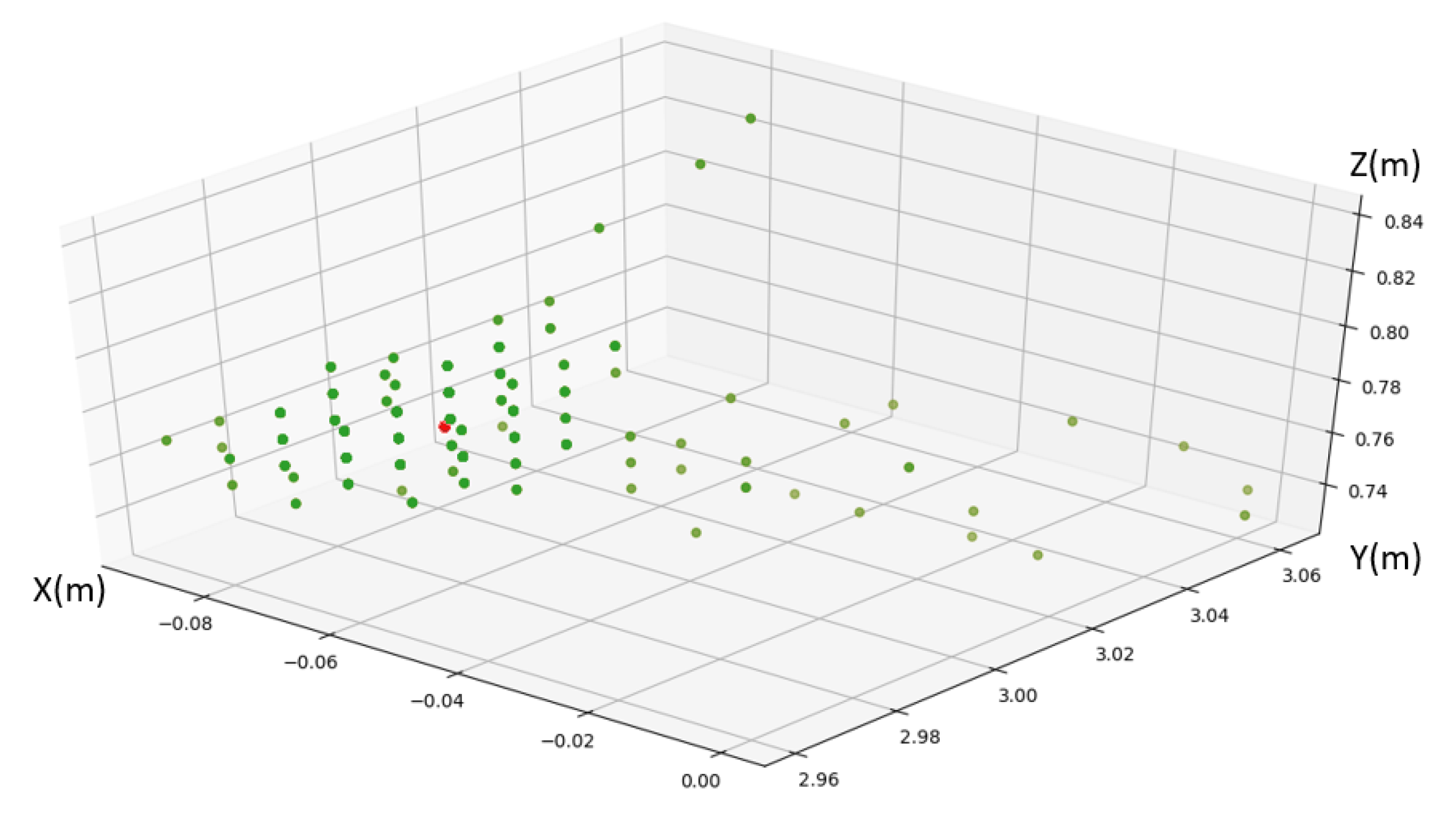
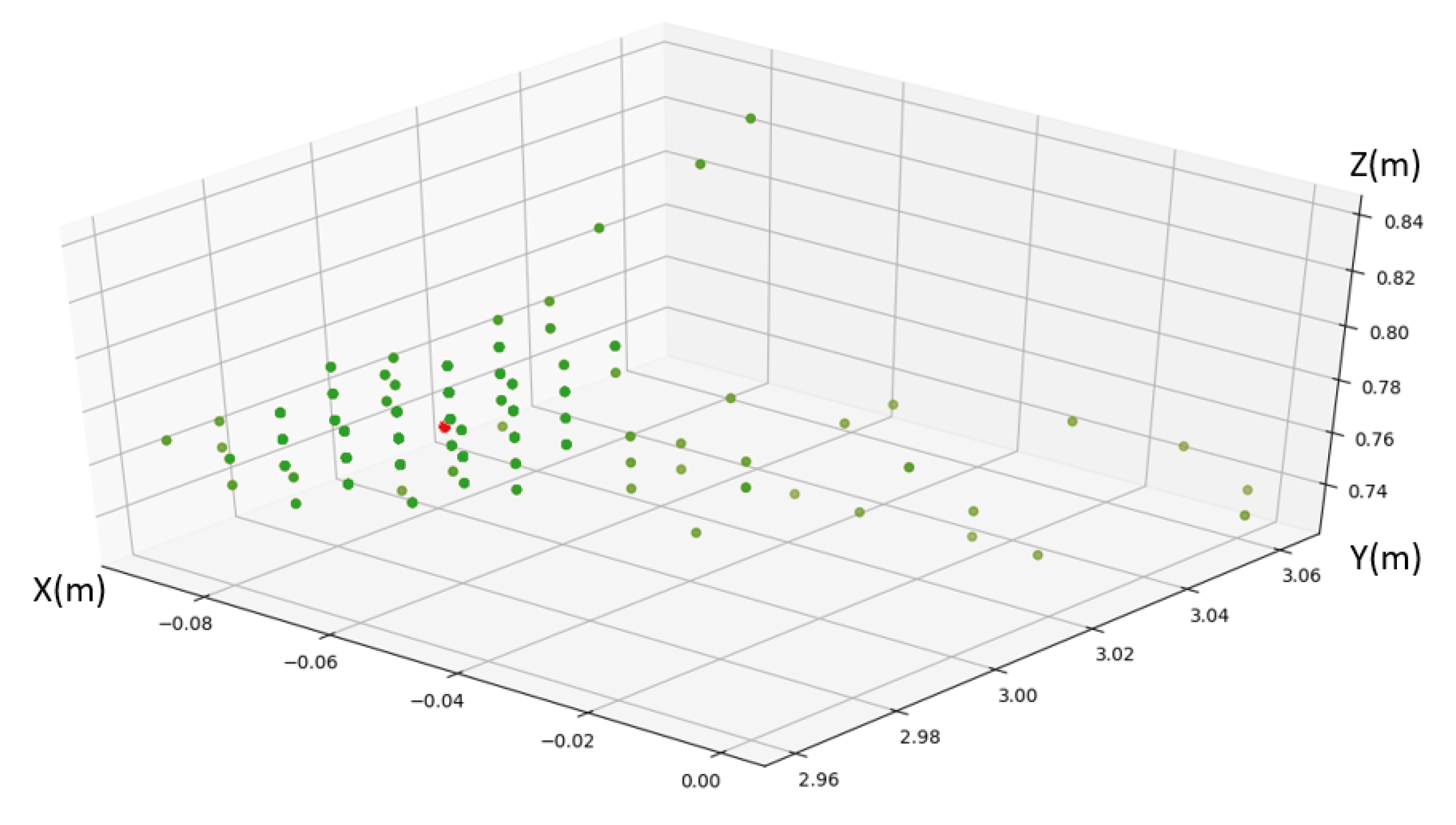
3.4.1. Static Measurement Precision
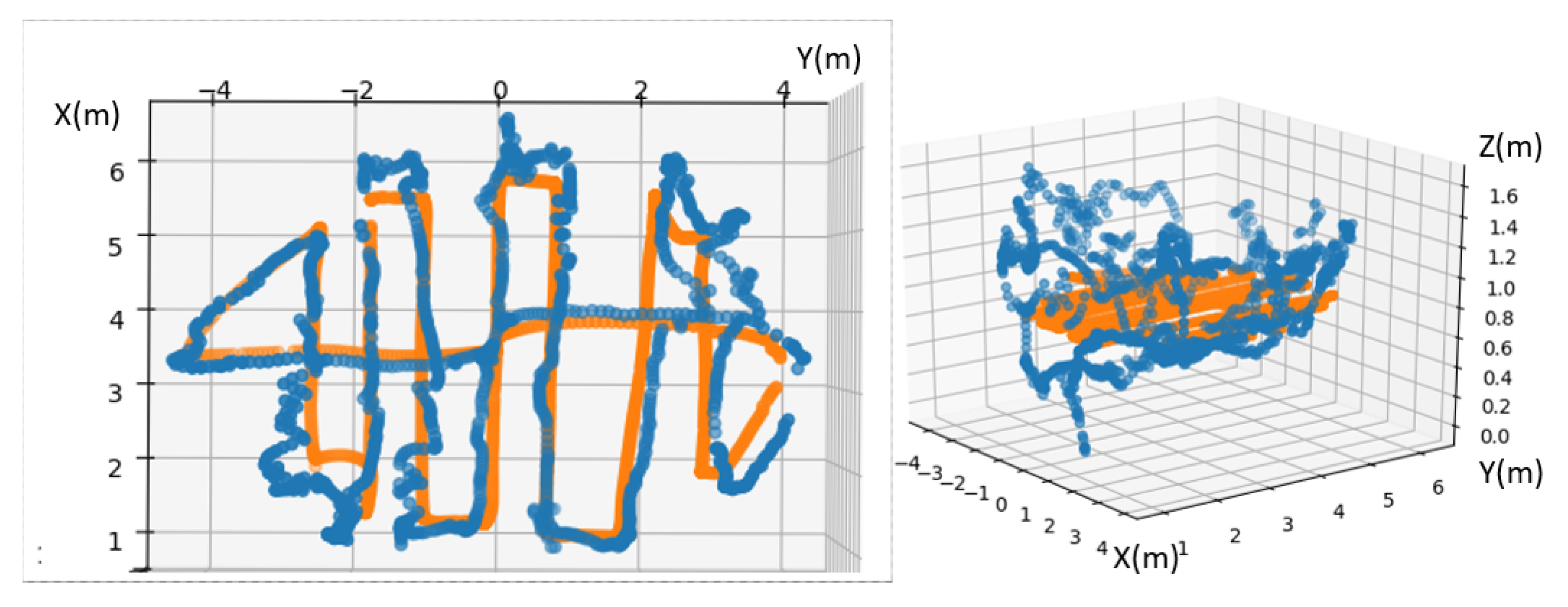
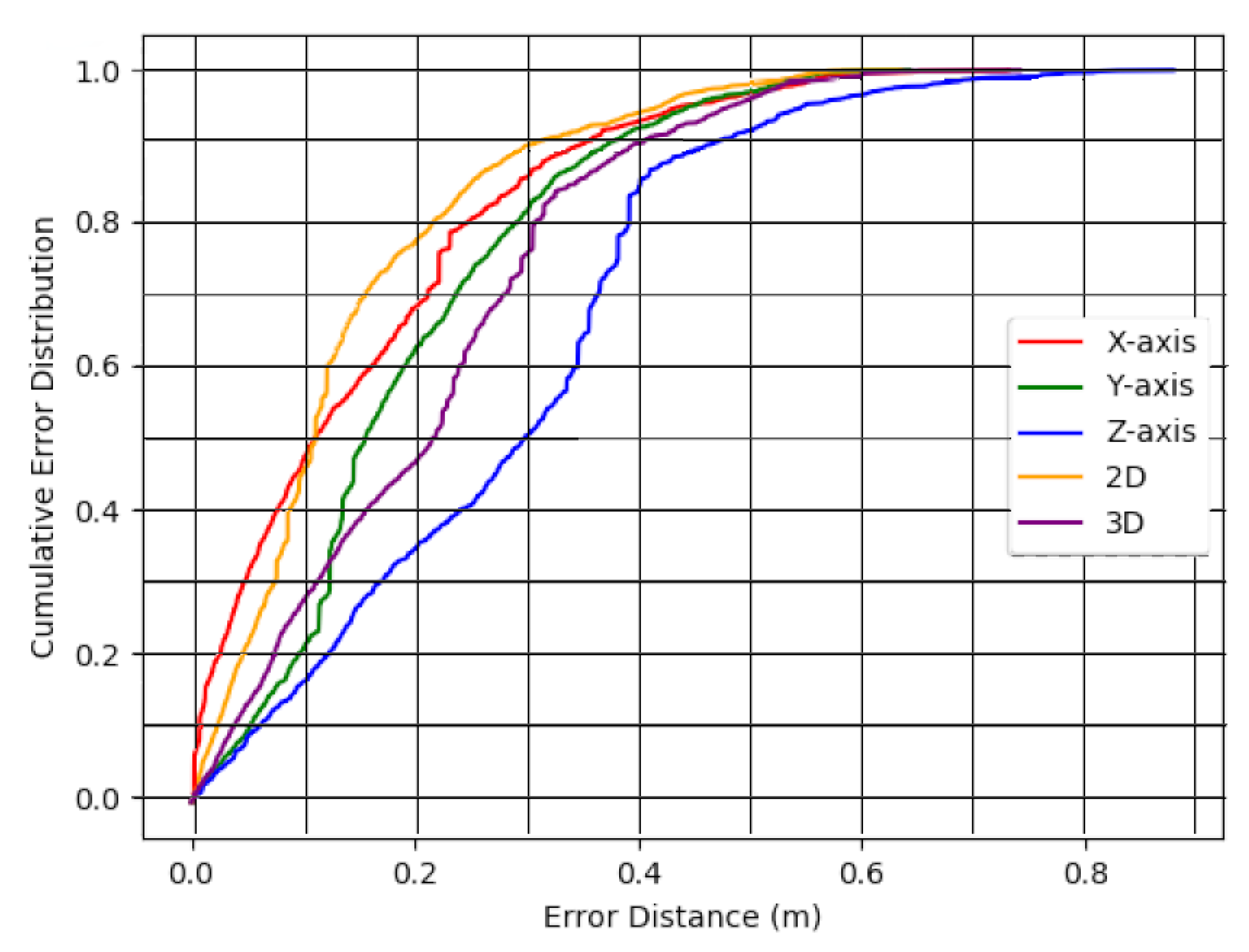
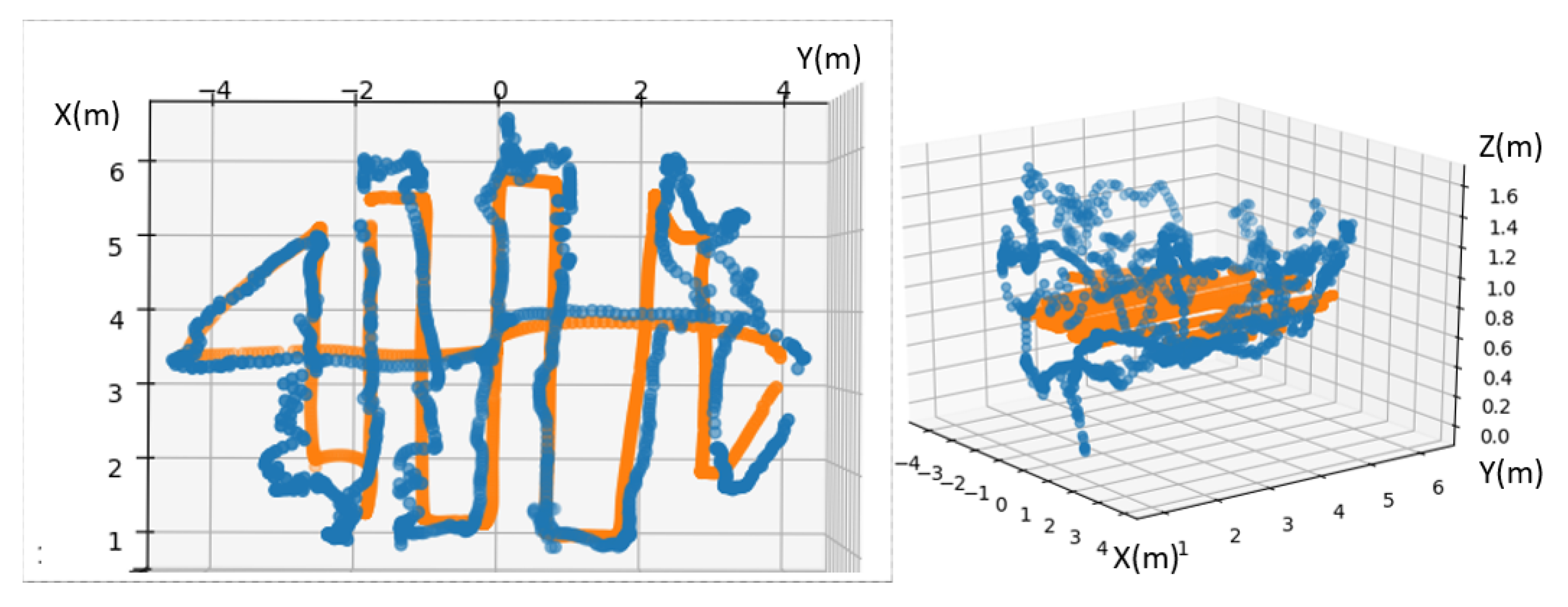
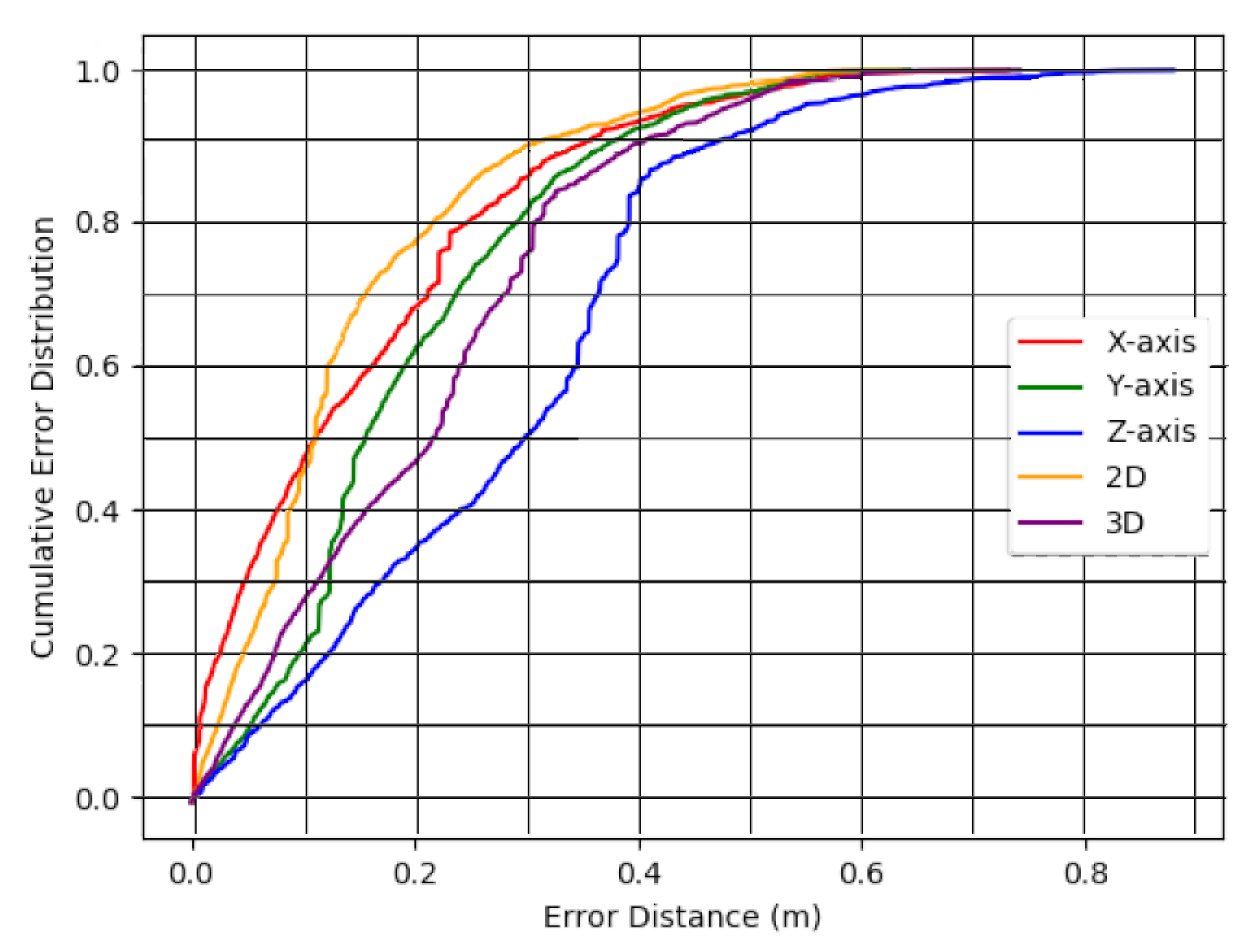
3.4.2. Dynamic Measurement Evaluation and Precision of a Trajectory
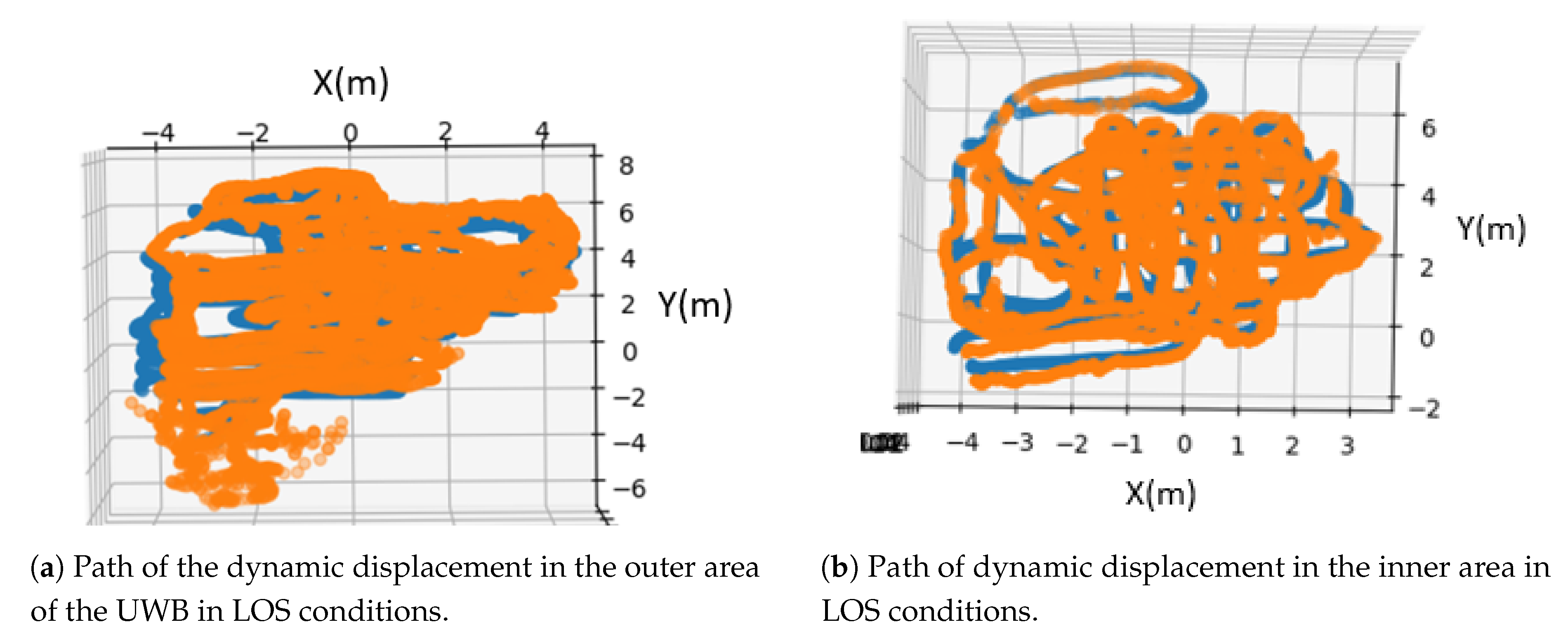
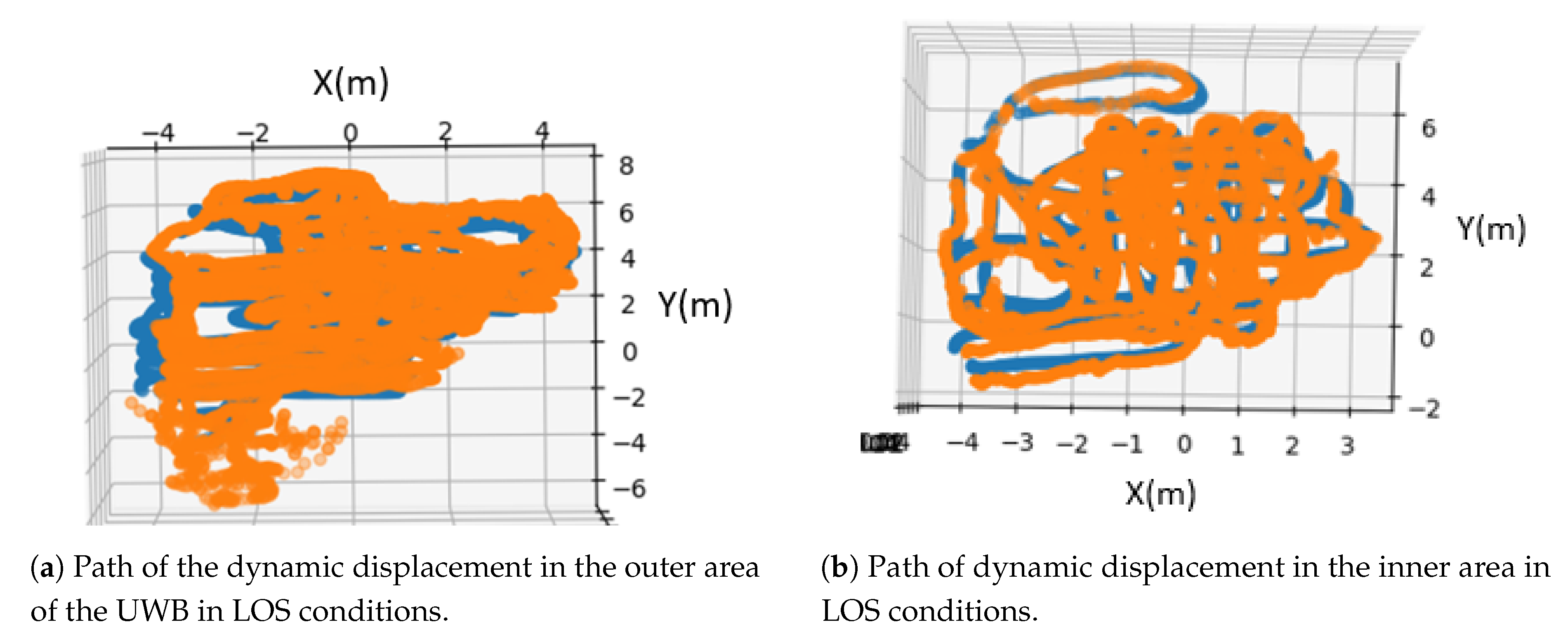
3.4.3. Dynamic Measurement Evaluation and Precision of Mapping
3.4.4. Test Z Anchor Change
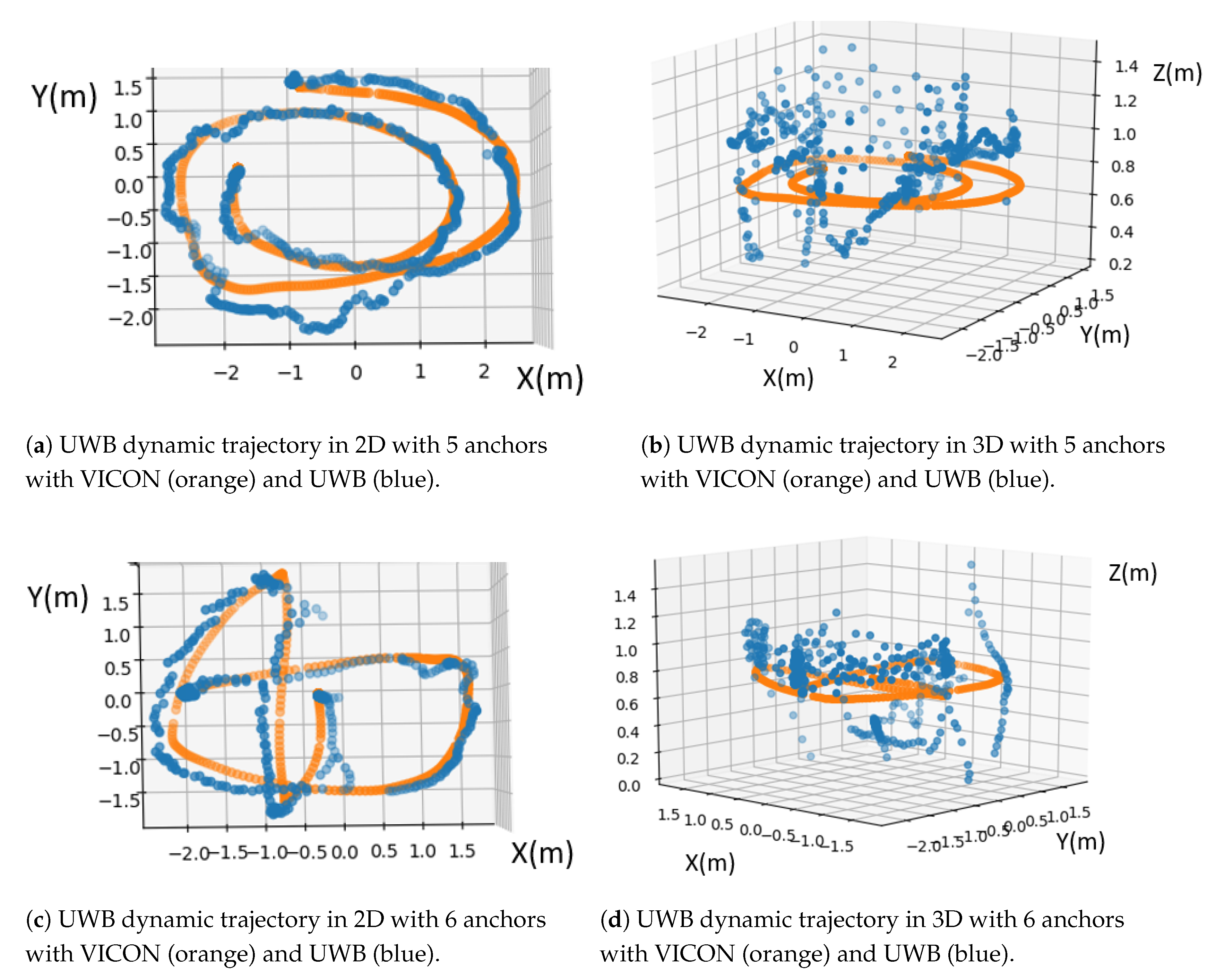
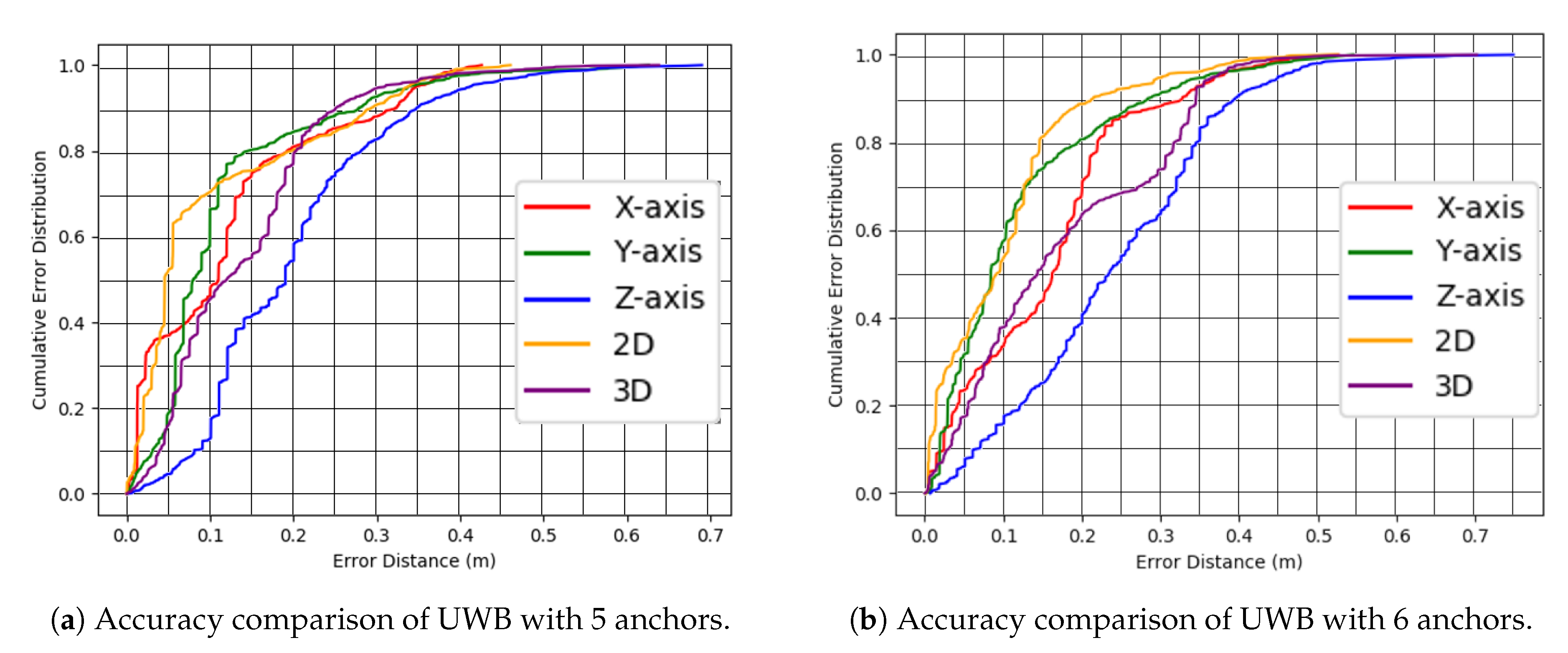
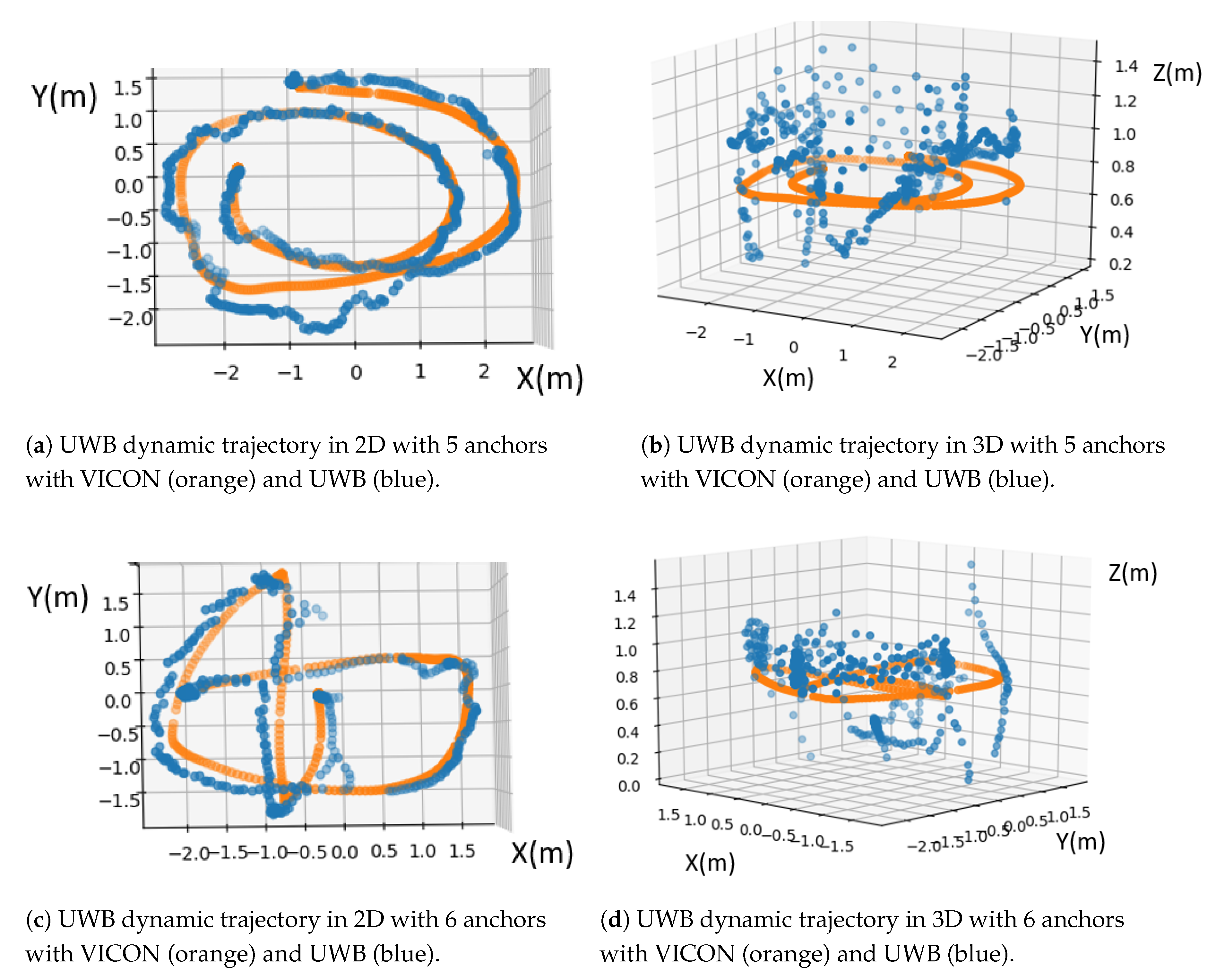
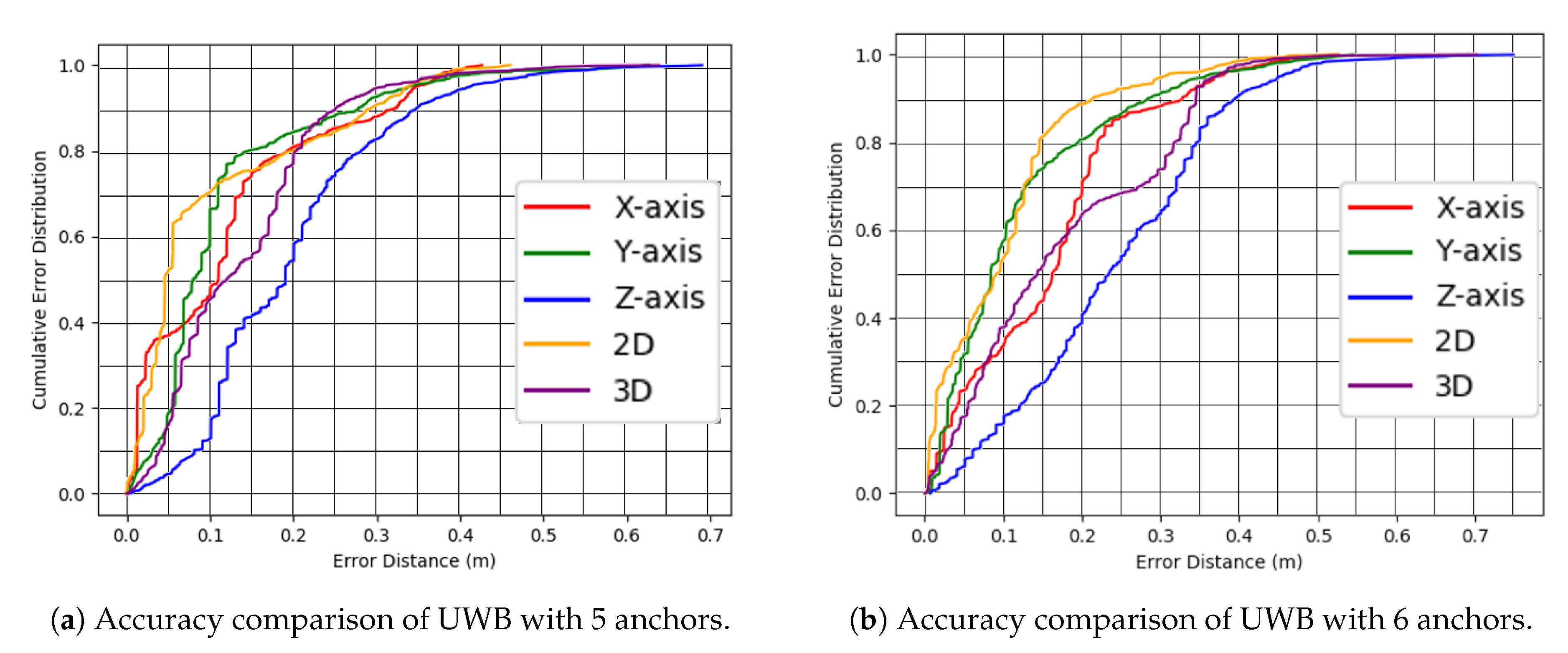
3.4.5. Study of the Influence of Anchors
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AoA | Angle of Arrival |
| CED | Cumulative Error Distribution |
| DOP | Dilution Of Precision |
| EKF | Extended Kalman Filter |
| GNSS | Global Navigation Satellite System |
| HMI | Human-Machine Interface |
| IMU | Inertial Measurement Unit |
| LOS | Line-Of-Sight |
| MEMS | Micro-Electro-Mechanical Systems |
| NLOS | Non-Line-Of-Sight |
| RFID | Radio Frequency Identification |
| RMSE | Root-Mean-Square Error |
| RSSI | Received Signal Strength Indicator |
| RTT | Round-Trip Time |
| TDoA | Time Difference Of Arrival |
| ToA | Time of Arrival |
| UWB | Ultra WideBand |
References
- Guna, J.; Jakus, G.; Pogačnik, M.; Tomažič, S.; Sodnik, J. An Analysis of the Precision and Reliability of the Leap Motion Sensor and Its Suitability for Static and Dynamic Tracking. Sensors 2014, 14, 3702–3720. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, M. Recognizing Hand Gestures with Microsoft’s Kinect; Department of Electrical Engineering of Stanford University: Palo Alto, CA, USA, 2011. [Google Scholar]
- Junker, H.; Amft, O.; Lukowicz, P.; Tröster, G. Gesture spotting with body-worn inertial sensors to detect user activities. Pattern Recognit. 2008, 41, 2010–2024. [Google Scholar] [CrossRef]
- Fong, D.T.P.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobkin, B.H. Wearable motion sensors to continuously measure real-world physical activities. Curr. Opin. Neurol. 2013, 26, 602–608. [Google Scholar] [CrossRef]
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays. Rep. x-io Univ. Bristol (UK) 2010, 25, 113–118. [Google Scholar]
- Hamel, T.; Mahony, R. Attitude estimation on SO [3] based on direct inertial measurements. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 2170–2175. [Google Scholar]
- Combettes, C.; Renaudin, V. Delay Kalman filter to estimate the attitude of a mobile object with indoor magnetic field gradients. Micromachines 2016, 7, 79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michel, T.; Genevès, P.; Fourati, H.; Layaïda, N. On attitude estimation with smartphones. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), Kona, HI, USA, 13–17 March 2017; pp. 267–275. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zurich, Zürich, Switzerland, 2012. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, C.; Kang, X.; Zhao, Q. Camera localization for augmented reality and indoor positioning: A vision-based 3D feature database approach. Int. J. Digit. Earth 2019, 1–15. [Google Scholar] [CrossRef]
- Kohoutek, T.K.; Mautz, R.; Donaubauer, A. Real-time indoor positioning using range imaging sensors. In Real-Time Image and Video Processing; International Society for Optics and Photonics: Bellingham, WA, USA, 2010. [Google Scholar]
- Niu, Q.; Li, M.; He, S.; Gao, C.; Gary Chan, S.H.; Luo, X. Resource-efficient and Automated Image-based Indoor Localization. ACM Trans. Sens. Networks (TOSN) 2019, 15, 19. [Google Scholar] [CrossRef]
- Ido, J.; Shimizu, Y.; Matsumoto, Y.; Ogasawara, T. Indoor Navigation for a Humanoid Robot Using a View Sequence. Int. J. Robot. Res. (IJRR) 2009, 28, 315–325. [Google Scholar] [CrossRef]
- Liao, X.; Chen, R.; Li, M.; Guo, B.; Niu, X.; Zhang, W. Design of a Smartphone Indoor Positioning Dynamic Ground Truth Reference System Using Robust Visual Encoded Targets. Sensors 2019, 19, 1261. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tilch, S.; Mautz, R. Current investigations at the ETH Zurich in optical indoor positioning. In Proceedings of the IEEE Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 174–178. [Google Scholar]
- Burki, B.; Guillaume, S.; Sorber, P.; Oesch, H.P. DAEDALUS: A versatile usable digital clip-on measuring system for Total Stations. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–10. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arai, T.; Yoshizawa, T.; Aoki, T.; Zempo, K.; Okada, Y. Evaluation of Indoor Positioning System based on Attachable Infrared Beacons in Metal Shelf Environment. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–4. [Google Scholar]
- Sato, T.; Nakamura, S.; Terabayashi, K.; Sugimoto, M.; Hashizume, H. Design and implementation of a robust and real-time ultrasonic motion-capture system. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–6. [Google Scholar]
- Wang, Y.T.; Li, J.; Zheng, R.; Zhao, D. ARABIS: An Asynchronous Acoustic Indoor Positioning System for Mobile Devices. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-level localization with a single WiFi access point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI 16), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Xiong, J.; Jamieson, K. Arraytrack: A fine-grained indoor location system. In Proceedings of the 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI 13), Lombard, IL, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Gansemer, S.; Grossmann, U.; Hakobyan, S. RSSI-based Euclidean Distance algorithm for indoor positioning adapted for the use in dynamically changing WLAN environments and multi-level buildings. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel WiFi/MEMS Integrated Indoor Navigation System Based on Two-Stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kiers, M.; Krajnc, E.; Dornhofer, M.; Bischof, W. Evaluation and Improvements of an RFID Based Indoor Navigation System for Visually Impaired and Blind People. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; p. 5. [Google Scholar]
- Shi, W.; Du, J.; Cao, X.; Yu, Y.; Cao, Y.; Yan, S.; Ni, C. IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario. Sensors 2019, 19, 968. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patiño-Studencka, L.; Batzer, U.; Thielecke, J. Phase smoothing in a virtually synchronized pseudolite system using stochastic clock modelling. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service, Kirkkonummi, Finland, 14–15 October 2010; pp. 1–5. [Google Scholar]
- Fujii, K.; Sakamoto, Y.; Wang, W.; Arie, H.; Schmitz, A.; Sugano, S. Hyperbolic Positioning with Antenna Arrays and Multi-Channel Pseudolite for Indoor Localization. Sensors 2015, 15, 25157–25175. [Google Scholar] [CrossRef] [Green Version]
- Renaudin, V.; Merminod, B.; Kasser, M. Optimal data fusion for pedestrian navigation based on UWB and MEMS. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 341–349. [Google Scholar]
- Susi, M.; Renaudin, V.; Lachapelle, G. Motion mode recognition and step detection algorithms for mobile phone users. Sensors 2013, 13, 1539–1562. [Google Scholar] [CrossRef]
- Blankenbach, J.; Norrdine, A. Position estimation using artificial generated magnetic fields. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar]
- Vandermeulen, D.; Vercauteren, C.; Weyn, M. Indoor localization Using a Magnetic Flux Density Map of a Building. In Proceedings of the International Conference on Ambient Computing, Applications, Services and Technologies, Porto, Portugal, 29 September–3 October 2013; pp. 42–49. [Google Scholar]
- Al-Hamad, A.; Ali, A.; Elhoushi, M.; Georgy, J. Indoor Navigation using Consumer Portable Devices in Cart/Stroller. In Proceedings of the International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 813–825. [Google Scholar]
- Dragomirescu, D.; Kraemer, M.; Jatlaoui, M.; Pons, P.; Aubert, H.; Thain, A.; Plana, R. 60GHz Wireless Nano-Sensors Network for Structure Health Monitoring as Enabler for Safer, Greener Aircrafts. In Advanced Topics in Optoelectronics, Microelectronics, and Nanotechnologies V; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7821. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Syberfeldt, A.; Ayani, M.; Holm, M.; Wang, L.; Lindgren-Brewster, R. Localizing operators in the smart factory: A review of existing techniques and systems. In Proceedings of the IEEE International Symposium on Flexible Automation (ISFA), Cleveland, OH, USA, 1–3 August 2016; pp. 179–185. [Google Scholar]
- Kulikov, R.S. Integrated UWB/IMU system for high rate indoor navigation with cm-level accuracy. In Proceedings of the Moscow Workshop on Electronic and Networking Technologies (MWENT), Moscow, Russia, 14–16 March 2018; pp. 1–4. [Google Scholar]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion. In Proceedings of the IEEE International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 100–105. [Google Scholar]
- Gharat, V.; Colin, E.; Baudoin, G.; Richard, D. Indoor performance analysis of LF-RFID based positioning system: Comparison with UHF-RFID and UWB. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Dotlic, I.; Connell, A.; Ma, H.; Clancy, J.; McLaughlin, M. Angle of arrival estimation using decawave DW1000 integrated circuits. In Proceedings of the Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Segura, M.; Hashemi, H.; Sisterna, C.; Mut, V. Experimental demonstration of self-localized ultra wideband indoor mobile robot navigation system. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–9. [Google Scholar]
- Aryan, A. Evaluation of Ultra-Wideband Sensing Technology for Position Location in Indoor Construction Environments. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2011. [Google Scholar]
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef]
- Eggert, D.; Lorusso, A.; Fisher, R. Estimating 3-D rigid body transformations: A comparison of four major algorithms. Mach. Vis. Appl. (MVA) 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–606. [Google Scholar]
- Ku, H.H. Precision Measurement and Calibration. Volume 1. Statistical Concepts and Procedures; Technical Report; National Bureau of Standards: Gaithersburg, MD, USA, 1969.
- Mok, E.; Lau, F.; Xia, L.; Retscher, G.; Tian, H. Influential factors for decimetre level positioning using ultra wide band technology. Surv. Rev. 2012, 44, 37–44. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Typical Accuracy | Typical Coverage | Typical Measuring Principle |
|---|---|---|---|
| Cameras | 0.1 mm-dm | 1–10 | Codedmarkers |
| Infrared | cm-m | 1–5 m | IR camera |
| Tactile & Polar Systems | um-mm | 3–2000 m | Distance & angular measurement |
| Sound | cm | 2–10 m | Multilateration |
| WLAN/WIFI | m | 20–50 m | Fingerprinting |
| RFID | dm-m | 1–50 m | Cell of Origin |
| Ultra WideBand | cm-m | 1–50 m | ToA, TDoA |
| High Sensitive GNSS | 10 m | ‘global’ | Assisted GNSS |
| Pseudolites | cm-dm | 10–1000 m | carrierphaseranges |
| Other Radio Frequencies | m | 10–1000 m | Fingerprinting, cell of Origin, RSSI, RTT |
| Inertial Navigation | 1% | 10–100 m | WLAN RSSI, GNSS |
| Magnetic Systems | mm-cm | 1–20 m | DCfield, coils , AC magnetic field |
| Infrastructure Systems | cm-m | building | Powerlines, floor tiles, fluorescent lamps |
| UWB Technologies | Decawave 1 | BlinkSight 2 | IIDRE 3 | BeSpoon 4 |
|---|---|---|---|---|
| Accuracy | X-Y 10 cm | 10 cm | 10–30 cm | 10 cm |
| Detecting Range | 290 m | 200+ m | 150 m | 600 m |
| Bandwith | 3.5–6.5 GHz | 7–8.5 GHz | 3.5–6.5 GHz | 3.5–4.5 GHz |
| Current Consumption | 30 mA | 30 mA | Max 30 mA | 30 mA |
| Interface | Spi control | wifi | Bluetooth USB RS232 | USB |
| Cost (euros) | 300 (kit) | N/A | 1140 | 650 |
| Static LOS Test | X-Axis | Y-Axis | Z-Axis | 2D | 3D |
|---|---|---|---|---|---|
| Mean error | 0.01 m | 0.01 m | 0.01 m | 0.01 m | 0.01 m |
| Range | 0.09 m | 0.10 m | 0.11 m | 0.09 m | 0.10 m |
| Standard deviation | 0.01 m | 0.01 m | 0.01 m | 0.01 m | 0.01 m |
| Dynamic Measure | X-Axis | Y-Axis | Z-Axis | 2D | 3D |
|---|---|---|---|---|---|
| Mean error | 0.20 m | 0.22 m | 0.32 m | 0.21 m | 0.24 m |
| Range | 0.73 m | 0.64 m | 0.87 m | 0.65 m | 0.75 m |
| Standard deviation | 0.13 m | 0.14 m | 0.29 m | 0.13 m | 0.18 m |
| UWB Mapping | X-Axis | Y-Axis | Z-Axis | 2D | 3D | |
|---|---|---|---|---|---|---|
| Inner | Mean error | 0.30 m | 0.17 m | 0.23 m | 0.23 m | 0.23 m |
| Range | 1.07 m | 0.60 m | 1.37 m | 0.56 m | 1.01 m | |
| Standard deviation | 0.18 m | 0.00 m | 0.20 m | 0.18 m | 0.12 m | |
| Outer | Mean error | 0.23 m | 0.27 m | 0.23 m | 0.25 m | 0.24 m |
| Range | 0.98 m | 1.05 m | 1.03 m | 1.01 m | 1.02 m | |
| Standard deviation | 0.03 m | 0.15 m | 0.19 m | 0.09 m | 0.12 m |
| Anchors Z Change | X-Axis | Y-Axis | Z-Axis | Measure 2D | Measure 3D |
|---|---|---|---|---|---|
| Mean error | 0.38 m | 1.37 m | 0.70 m | 0.87 m | 0.81 m |
| Range | 0.78 m | 0.64 m | 1.28 m | 0.71 m | 0.90 m |
| Standard deviation | 0.04 m | 0.05 m | 0.22 m | 0.04 m | 0.10 m |
| Influence of Anchors | X-Axis | Y-Axis | Z-Axis | 2D | 3D | |
|---|---|---|---|---|---|---|
| 4 anchors | Mean error | 0.20 m | 0.22 m | 0.32 m | 0.21 m | 0.24 m |
| Range | 0.73 m | 0.64 m | 0.87 m | 0.65 m | 0.75 m | |
| Standard deviation | 0.13 m | 0.14 m | 0.29 m | 0.13 m | 0.18 m | |
| 5 anchors | Mean error | 0.16 m | 0.16 m | 0.22 m | 0.16 m | 0.18 m |
| Range | 0.42 m | 0.60 m | 0.66 m | 0.51 m | 0.56 m | |
| Standard deviation | 0.02 m | 0.10 m | 0.22 m | 0.06 m | 0.11 m | |
| 6 anchors | Mean error | 0.19 m | 0.16 m | 0.27 m | 0.17 m | 0.20 m |
| Range | 0.52 m | 0.54 m | 0.74 m | 0.53 m | 0.6 m | |
| Standard deviation | 0.10 m | 0.01 m | 0.26 m | 0.05 m | 0.12 m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delamare, M.; Boutteau, R.; Savatier, X.; Iriart, N. Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications. Sci 2020, 2, 23. https://doi.org/10.3390/sci2020023
Delamare M, Boutteau R, Savatier X, Iriart N. Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications. Sci. 2020; 2(2):23. https://doi.org/10.3390/sci2020023
Chicago/Turabian StyleDelamare, Mickaël, Remi Boutteau, Xavier Savatier, and Nicolas Iriart. 2020. "Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications" Sci 2, no. 2: 23. https://doi.org/10.3390/sci2020023
APA StyleDelamare, M., Boutteau, R., Savatier, X., & Iriart, N. (2020). Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications. Sci, 2(2), 23. https://doi.org/10.3390/sci2020023