
Vehicle Driving Safety of Underground Interchanges Using a Driving Simulator and Data Mining Analysis



Abstract
1. Introduction
- (1)
- Theoretical derivation methods generally investigate the facilities of underground roads. Hsu et al. used the driver’s reaction time and visual recognition distance, combined with the running state of the vehicle, to derive the optimal placement position of signs and the distance between sign placements [9]. Zhang et al. used analytical methods to check and optimize the visibility of underground roads [10]. Although the theoretical derivation method has strong advantages, the practical problem is more abstract, and the theoretical derivation is more difficult to develop; therefore, this research method needs to be further studied and understood.
- (2)
- Subjective evaluation methods are generally used for safety evaluation. Combined with engineering standards and practical experience, the safety analysis of underground roads can be realized. Zotic et al. accounted for the characteristics of underground roads and the factors affecting traffic safety and combined the consultation and scoring of expert opinions to establish a safety evaluation suitable for the design stage of urban underground roads [11]. However, this method is highly subjective, requires sufficient engineering experience, and has certain limitations.
- (3)
- Vehicle-data-based methods are the most common [12]. Wan et al. used the coil detector on each lane of Shanghai express roads to obtain the flow rate, speed, occupancy rate, and number of vehicles of each vehicle type in each lane of a right on-ramp. Then, they used surveillance video image processing and obtained the corresponding data for a left on-ramp and compared the left on-ramp with the right on-ramp [13]. However, the coil data acquisition period in their study was 20 s, and only macro traffic flow research on underground roads could be carried out, so the relevant data regarding vehicle micro behavior cannot be obtained.
2. Methodology
2.1. Driving Simulator Tests
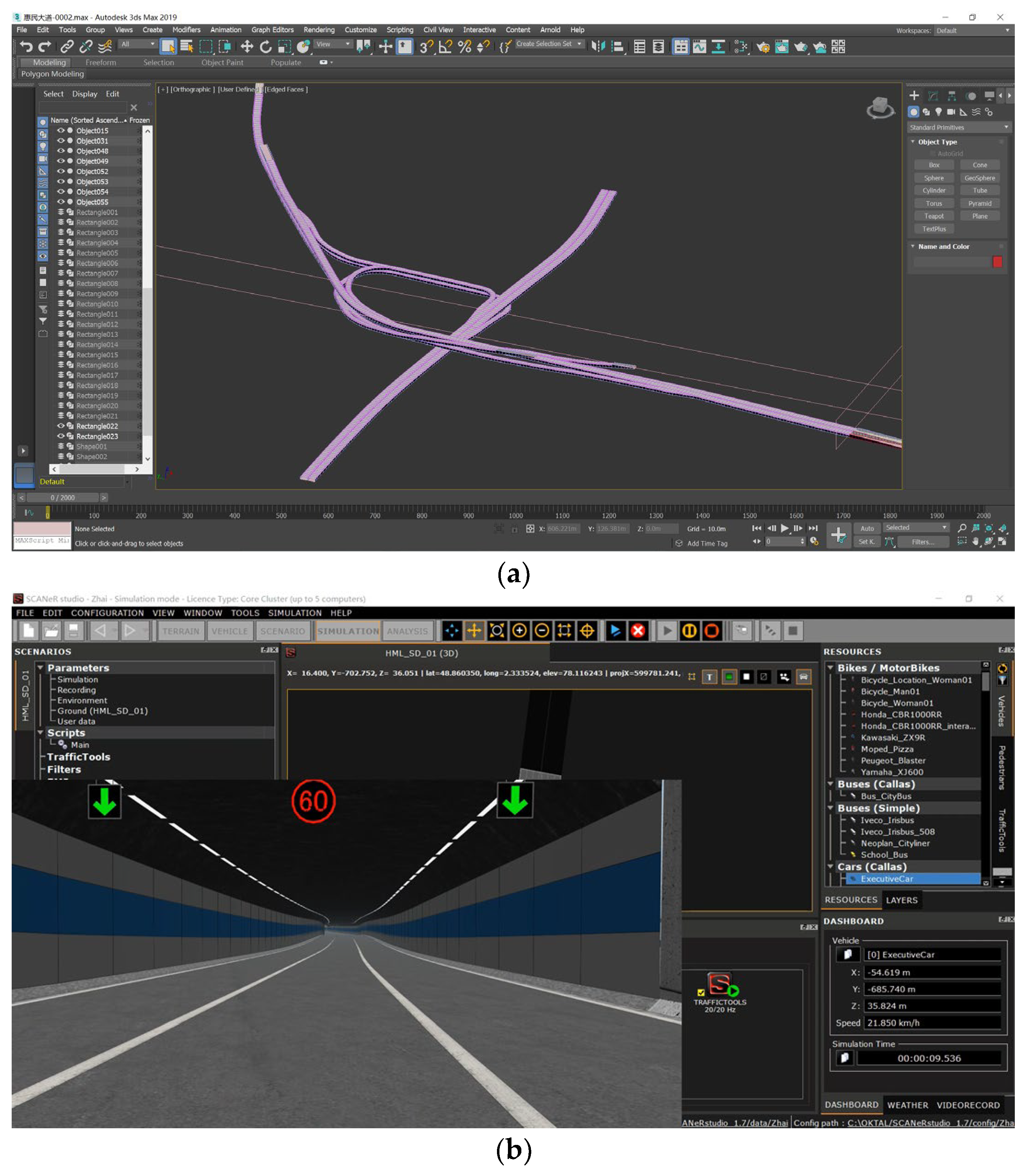
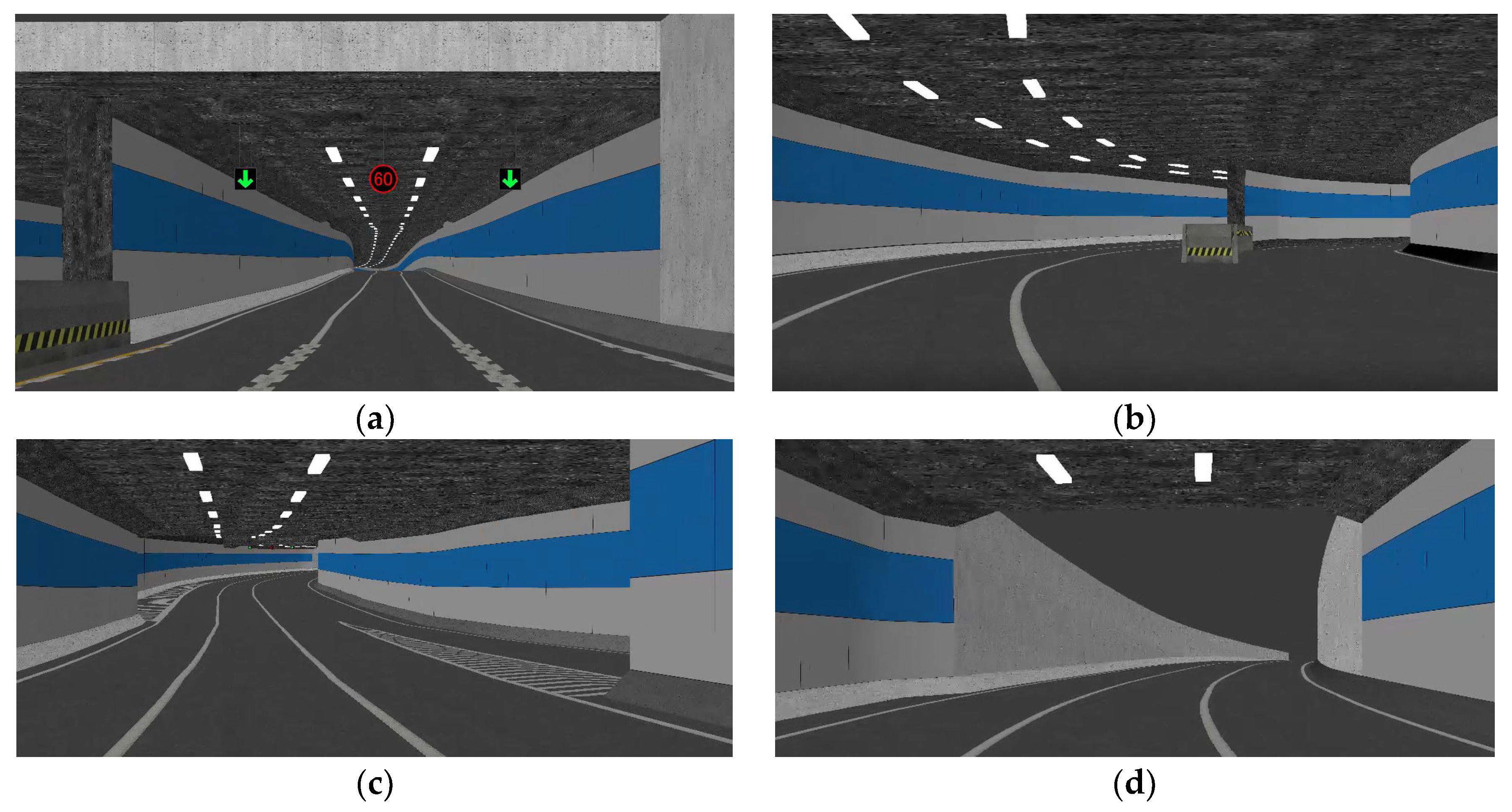
2.1.1. Modeling of Underground Interchanges
2.1.2. Scheme Design
2.1.3. Testing Procedure
- Fill in the personal information form, including gender, age, and driving experience;
- Carry out about five minutes of driving practice, and learn the precautions and instrument use points;
- Learn the destination and complete the driving simulation;
- Record the driving conditions and save the data.
2.1.4. Data Pre-Processing
2.2. Evaluation Index System
2.2.1. Safety Index
- (1)
- Speed V: The distance traveled by the vehicle per unit time. Traditional automobile dynamics take the car as a particle or a rigid body, and the running speed method is used to evaluate the safety [32].
- (2)
- Acceleration a: The change in the speed of the vehicle in the direction of travel per unit time. According to the specifications of JTG D20-2017 in China [33], acceleration rates less than 0.9 m/s2 are the best acceleration conditions, while acceleration rates greater than 1.2 m/s2 are the worst. When the absolute value of acceleration is less than 1.3 m/s2, it is better, and greater than 2.5 m/s2 is worse.
- (3)
- Gas pedal Gp: The product of the depth of the driver’s pedal and the length of the pedal. This value indicates the driver’s ability to control the vehicle; the smaller it is, the better the control.
2.2.2. Comfort Index
- (4)
- Lateral acceleration : The acceleration caused by the centrifugal force generated when the vehicle makes a turn. The value of lateral acceleration can indicate the driver’s comfort level.
- (5)
- Acceleration interference σ (m/s2): The standard deviation of the vehicle acceleration against the average acceleration. Acceleration interference represents the magnitude of velocity swing; the greater the acceleration interference, the lower the safety and comfort, and vice versa, as shown in Equation (1) [34].where T represents the total observation time, and a(t) represents the acceleration at time t.
- (6)
- Torque of the steering wheel m: An excessive m value will increase the difficulty of the driver’s control, affecting the comfort and safety of driving. The torque characteristic of the steering wheel (m) preferred by the driver is obtained by multiple linear regression, as calculated in Equation (2) [35].where m represents the desired torque, and V represents the speed.
- (7)
- Comfort loss of steering wheel l: When the actual steering wheel torque of the vehicle is different from the torque preferred by the driver, there is a loss of driver comfort. Under certain working conditions, this value reflects the comprehensive degree to which the actual steering wheel torque characteristics of the vehicle make the driver feel uncomfortable relative to the driver’s preferred steering wheel torque characteristics, as shown in Equation (3). The larger the l, the farther the actual steering wheel torque characteristics deviate from the expected characteristics, and the lower the comfort. On the contrary, the smaller the l, the better the steering comfort of the vehicle. When l = 0, the actual steering characteristics of the vehicle fully coincide with the expected characteristics; that is, the driver can fully meet the comfort requirements of the steering wheel torque characteristics of the vehicle.where y represents the actual torque characteristic of the steering wheel, k represents the comfort loss coefficient of the steering wheel torque characteristic, and rh denotes the radius of the steering wheel. i is used to distinguish between different working conditions. In this simulation, the average weight of the car was 1400 kg and the rh was 220 mm. According to the steering lightness test in QC/T 480-1999, the limit values of the average steering force of the steering disc are FS60 = 50 N and FS100 = 15 N. Thus, k = 0.0675 could be obtained.
2.2.3. Summary Variables
2.3. Data Mining Method
2.3.1. Multiple Linear Regression (MLR)
2.3.2. Analysis of Variance (ANOVA)
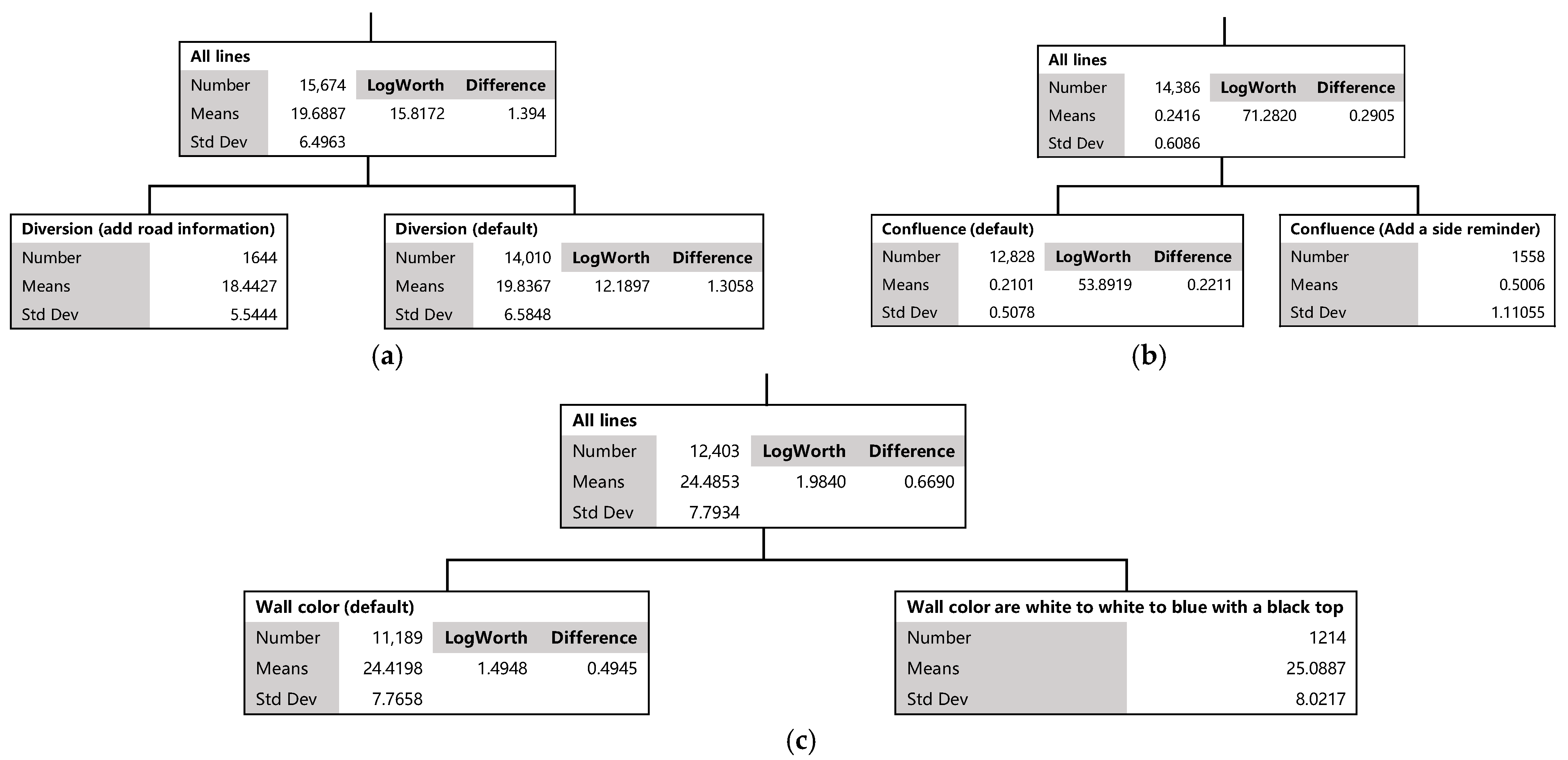
2.3.3. Decision Tree
2.3.4. Neural Network Models
3. Results and Discussions
3.1. Driving Safety Analysis
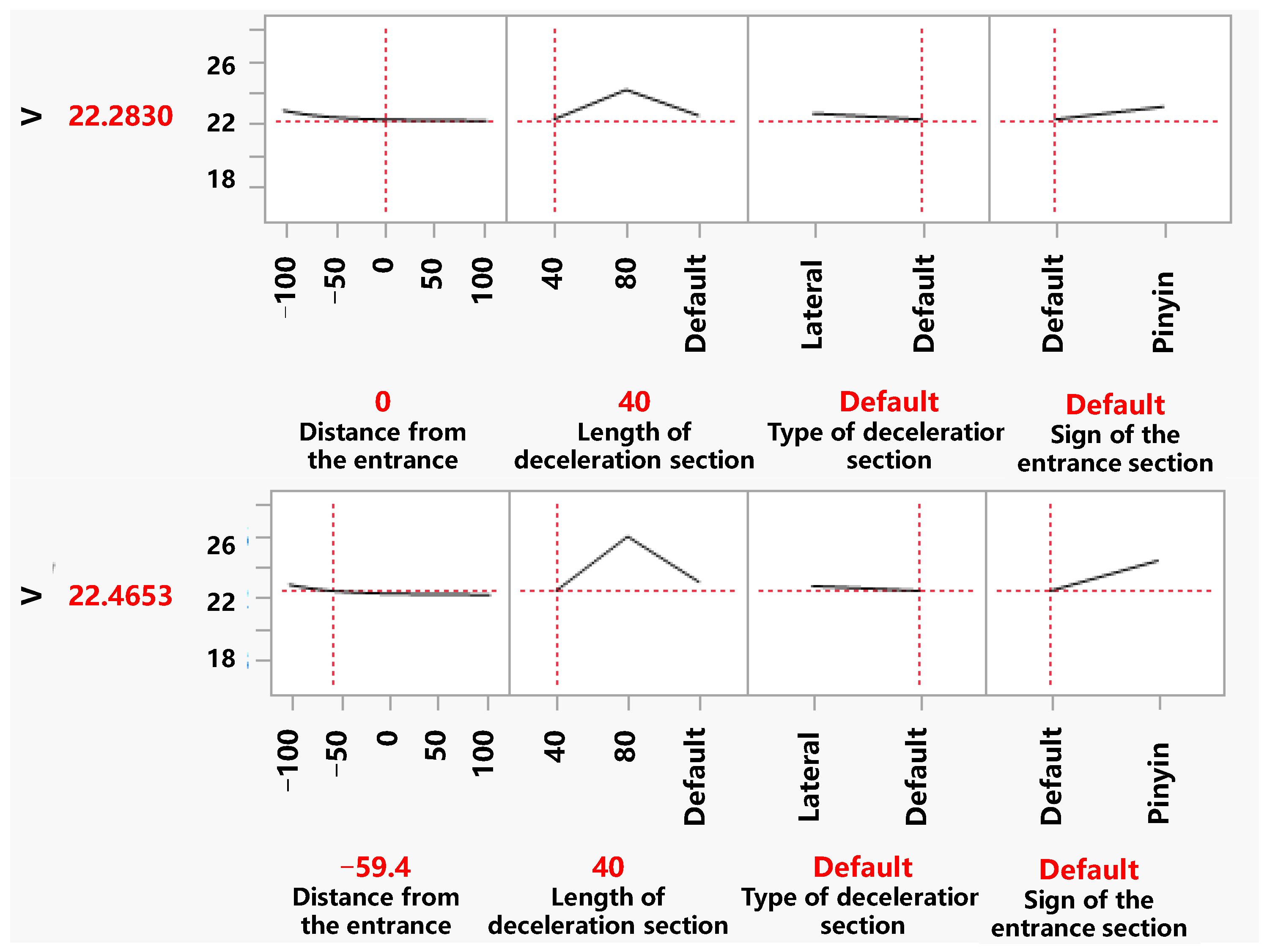
3.2. Driving Comfort Analysis
4. Conclusions
- (1)
- The length of the deceleration section should be adjusted from 60 m to 40 m, which can not only meet the deceleration effect of the entrance but can also make people feel more comfortable;
- (2)
- Setting up the road sign information at the DC section and the reminder for side-approaching cars at the DC section can improve the safety of driving;
- (3)
- The ceiling should be white, and the side walls should be white and blue, which can reduce the speed change in most sections of the underground interchange and increase the driving stability of the driver. For the basic section, a black ceiling instead of a bright color can reduce visual fatigue and glare caused by wall reflections, thus improving driving comfort.
- (4)
- When the driving comfort of a UI was studied from the perspective of comfort loss value, it was found that although the driver’s driving safety was high, the driving comfort was affected when too many traffic safety facilities were set up. Therefore, to explore the comprehensive evaluation of driving safety and comfort in underground interchanges, other methods must be used for evaluation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Z.; Gu, X.; Hong, R. Fire Protection and Evacuation Analysis in Underground Interchange Tunnels by Integrating BIM and Numerical Simulation. Fire 2023, 6, 139. [Google Scholar] [CrossRef]
- Ding, J. Analysis on the Safety of Expressway Interchange. J. World Archit. 2021, 5, 5–8. [Google Scholar] [CrossRef]
- Pan, F.; Yang, Y.; Zhang, L.; Yang, X.; Yang, J.; Liu, M. Analysis of EEG characteristics of drivers at the entrance and exit of an undersea tunnel and research on driving safety. Int. J. Saf. Secur. Eng. 2021, 11, 155–165. [Google Scholar] [CrossRef]
- Liu, Z.; Gu, X.; Ren, H.; Li, S.; Dong, Q. Permanent Deformation Monitoring and Remaining Life Prediction of Asphalt Pavement Combining Full-Scale Accelerated Pavement Testing and FEM. Struct. Control Health Monit. 2023, 2023, 6932621. [Google Scholar] [CrossRef]
- Luo, Y.; Wan, Y. Analysis on Safety Influencing Factors on Highway Interchange Design. J. Archit. Res. Dev. 2022, 6, 27–32. [Google Scholar] [CrossRef]
- Bassan, S. Sight distance and horizontal curve aspects in the design of road tunnels vs. highways. Tunn. Undergr. Sp. Technol. 2015, 45, 214–226. [Google Scholar] [CrossRef]
- Scott, P.; Charters, D.; Faller, G. Underground road interchanges: Assessing options and reducing risk. Tunn. Manag. Int. 2005, 8, 30–37. [Google Scholar]
- Lee, I.-B.; Kim, N. A Study on Safe Separation Distance between Tunnel and Interchange. KSCE J. Civ. Environ. Eng. Res. 2019, 39, 273–279. [Google Scholar]
- Hsu, C.-C.; Chuang, K.-H. Traffic and Environmental Cues and Slow-Down Behaviors in Virtual Driving. Percept. Mot. Ski. 2016, 122, 101–122. [Google Scholar] [CrossRef]
- Zhang, C. Net Distance between an Urban Road Grade Crossing and a Tunnel. J. Highw. Transp. Res. Dev. 2017, 11, 85–89. [Google Scholar] [CrossRef]
- Zotic, V.; Alexandru, D.-E.; Egresi, I.O. Road Safety in the Romanian Cities. A Study on Urban Traffic Crashes. J. Settl. Spat. Plan. 2021, 12, 131. [Google Scholar] [CrossRef]
- Liu, Z.; Dong, Q.; Gu, X. Permanent deformation evaluation and instability prediction of semi-rigid pavement structure using accelerated pavement testing and finite element method. J. Test. Eval. 2024, 52, JTE20230209. [Google Scholar] [CrossRef]
- Wan, X.; Shao, M.; Sun, L. A Study on the Features of Traffic Flow at Ieft-side Merging Areas of Urban Freeways. J. Transp. Inf. Saf. 2016, 34, 117–122. [Google Scholar]
- Wang, E.; Huang, B.; Liu, B. Traffic Flow Characteristics and Vehicle Road Coordination Improvement in Subterranean Interweaving. In International Conference on Artificial Intelligence and Logistics Engineering; Springer: Cham, Switzerland, 2023; pp. 14–24. [Google Scholar]
- Zhu, J.; Chen, F.; Wang, Z.; Hu, F. Research on Optimization Design of Underground Interchange Ramp Radius Based on Driving Simulation. CICTP 2019, 2019, 6274–6286. [Google Scholar]
- Yeung, J.S.; Wong, Y.D. Road traffic accidents in Singapore expressway tunnels. Tunn. Undergr. Sp. Tech. 2013, 38, 534–541. [Google Scholar] [CrossRef]
- Chen, Y.R.; Zheng, S.W. Mechanism analysis of vehicle operating characteristic affected by visual environment of underground road. J. Tongji Univ. 2013, 41, 1031–1039. [Google Scholar] [CrossRef]
- Papantoniou, P.; Papadimitriou, E.; Yannis, G. Review of driving performance parameters critical for distracted driving research. Transp. Res. Procedia 2017, 25, 1796–1805. [Google Scholar] [CrossRef]
- Bobermin, M.P.; Silva, M.M.; Ferreira, S. Driving simulators to evaluate road geometric design effects on driver behaviour: A systematic review. Accid. Anal. Prev. 2021, 150, 105923. [Google Scholar] [CrossRef]
- Hou, Y.; Zhao, Y.; Hulme, K.F.; Huang, S.; Yang, Y.; Sadek, A.W.; Qiao, C. An integrated traffic-driving simulation framework: Design, implementation, and validation. Transp. Res. Part C Emerg. Technol. 2014, 45, 138–153. [Google Scholar] [CrossRef]
- Siedlecka, J.; Bortkiewicz, A. Driving simulators in risk assessment of traffic accident among drivers with obstructive sleep apnea. Med. Pr. 2012, 63, 229–236. [Google Scholar]
- Meng, F.; Wong, S.; Yan, W.; Li, Y.; Yang, L. Temporal patterns of driving fatigue and driving performance among male taxi drivers in Hong Kong: A driving simulator approach. Accid. Anal. Prev. 2019, 125, 7–13. [Google Scholar] [CrossRef]
- Li, L.; Tian, S.; Zhou, W.; Wang, F. Application of driving simulators in the validation test for vehicle active safety system. Int. J. Crashworthiness 2023, 28, 159–169. [Google Scholar] [CrossRef]
- Ezzati Amini, R.; Al Haddad, C.; Batabyal, D.; Gkena, I.; de Vos, B.; Cuenen, A.; Brijs, T.; Antoniou, C. Driver distraction and in-vehicle interventions: A driving simulator study on visual attention and driving performance. Accid. Anal. Prev. 2023, 191, 107195. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, Y.; Wang, S.; Shi, J. Analysis and Modeling of Speed Perception Sensitivity of Drivers on Underground Expressways. J. Tongji Univ. Nat. Sci. 2023, 51, 83–90. [Google Scholar]
- Huang, Y.; Chen, F.; Song, M.; Pan, X.; You, K. Effect evaluation of traffic guidance in urban underground road diverging and merging areas: A simulator study. Accid. Anal. Prev. 2023, 186, 107036. [Google Scholar] [CrossRef] [PubMed]
- Ernst, S.; Patel, M.; Capers, H.A.; Dwyer, D.; Hawkins, C.; Jakovich, G.S.; Lupton, W.; Margro, T.; Ralls, M.L.; Rohena, J. Underground Transportation Systems in Europe: Safety, Operations, and Emergency Response; Federal Highway Administration, Office of International Programs: Alexandria, VA, USA, 2006. [Google Scholar]
- Wei, T.; Wei, W.; Li, H.; Liu, H.; Zhu, T.; Liu, F. An Analysis of Driving Behavior Model and Safety Assessment Under Risky Scenarios Based on an XGBoost Algorithm. J. Transp. Inf. Saf. 2022, 40, 53–60. [Google Scholar]
- Liu, Y. A study on merging and diverging area design for urban underground expressway. Procedia Eng. 2016, 165, 175–183. [Google Scholar] [CrossRef]
- Yuan, S.; Jing, X.; Shi, C. Traffic Capacity Calculation for Urban Underground Interchange. J. Tongji Univ. Nat. Sci. 2021, 49, 236–242. [Google Scholar]
- Liu, Z.; Gu, X. Performance evaluation of full-scale accelerated pavement using NDT and laboratory tests: A case study in Jiangsu, China. Case Stud. Constr. Mat. 2023, 18, e02083. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, J.; Gong, D.; Ji, Y. Study on multi-degree of freedom dynamic vibration absorber of the car body of high-speed trains. Mech. Sci. 2022, 13, 239–256. [Google Scholar] [CrossRef]
- Sun, L.; Gu, X.; Hu, D.; Zhou, Z.; Wang, G. Anti-aging mechanism and rheological properties of lignin, quercetin, and gallic acid as antioxidants in asphalt. Constr. Build. Mater. 2023, 369, 130560. [Google Scholar] [CrossRef]
- Liu, S.; Huang, H. The Control Standard for Settlement of Pavement Based on the Model of Acceleration Interference. Acad. J. Sci. Technol. 2022, 1, 47–52. [Google Scholar] [CrossRef]
- Uchino, D.; Hira, T.; Ogawa, K.; Ikeda, K.; Kato, T.; Endo, A.; Kato, H.; Narita, T. Effect of steering reaction torque of ultra-compact electric vehicle on steering burden for active steering wheel system. Int. J. Appl. Electromagn. Mech. 2023, 71, S363–S371. [Google Scholar] [CrossRef]
- Ma, S.; Hu, J.; Ma, E.; Li, W.; Wang, R. Cluster Analysis of Freeway Tunnel Length Based on Naturalistic Driving Safety and Comfort. Sustainability 2023, 15, 11914. [Google Scholar] [CrossRef]
- Jiangbi, H.; Meijie, Z. The Length Definition of the Expressway Tunnel Based on Driving Safety and Comfort. In Proceedings of the 2010 International Conference on Optoelectronics and Image Processing, Haikou, China, 11–12 November 2010; pp. 557–560. [Google Scholar]
- Liu, Z.; Chen, Y.H.; Gu, X.Y.; Yeoh, J.K.W.; Zhang, Q.P. Visibility classification and influencing-factors analysis of airport: A deep learning approach. Atmos. Environ. 2022, 278, 119085. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, Z.; Gu, X.; Sun, L.; Wang, C. Laboratory evaluation of the performance of reclaimed asphalt mixed with composite crumb rubber-modified asphalt: Reconciling relatively high content of RAP and virgin asphalt. Int. J. Pavement Eng. 2023, 24, 2217320. [Google Scholar] [CrossRef]
- Analysis of Variance (ANOVA). Rank-Based Methods for Shrinkage and Selection; John Wiley & Sons: Hoboken, NJ, USA, 2022; pp. 149–190. [Google Scholar] [CrossRef]
- Liu, Z.; Gu, X.; Chen, J.; Wang, D.; Chen, Y.; Wang, L. Automatic recognition of pavement cracks from combined GPR B-scan and C-scan images using multiscale feature fusion deep neural networks. Autom. Constr. 2023, 146, 104698. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, Q.; Gu, X. Assessment of Pavement Structural Conditions and Remaining Life Combining Accelerated Pavement Testing and Ground-Penetrating Radar. Remote Sens. 2023, 15, 4620. [Google Scholar] [CrossRef]
- Wang, R.; Bian, J.; Nie, F.; Li, X. Nonlinear Feature Selection Neural Network via Structured Sparse Regularization. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 9493–9505. [Google Scholar] [CrossRef]
- Satoh, S.; Yamagishi, K.; Takahashi, T. Comparing feedforward neural networks using independent component analysis on hidden units. PLoS ONE 2023, 18, e0290435. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | Values |
|---|---|
| Types of underground interchange | Six lanes, two ways, two entrances |
| Speed of vehicle (km/h) | 60 to 80 |
| Length (km) | 2.5 |
| Net height (m) | 5 |
| Single-lane width (m) | 3.75 |
| Road alignment | The whole process is mainly linear, including part of the curve section, a diversion port, and a confluence port |
| Facility Types | Design Schemes |
|---|---|
| Color | Walls change from white to blue to white, with a black ceiling |
| Deceleration section at entrance | Longitudinal deceleration mark, length of 60 m, gradient section of 30 m |
| Sign at entrance section | Blue on white; top half: speed limit and reminder to use headlights; bottom half: road name |
| Sign at exit section | Confirmation signs are set up at the diversion point, and exit warning signs are set up at 500 m, 1000 m, and 2000 m before the diversion point |
| Sign for diversion and confluence: Section 1 (DC1) | Two of them on the right side of the road, 10 m and 50 m before DC1 |
| Sign for diversion and confluence: Section 2 (DC2) | Two of them on the right side of the road, 10 m and 50 m before DC2 |
| Number | Sign at Entrance Section | Sign at Exit Section | Diversion 1 | Confluence 2 | Wall Color | Types of Deceleration Section | Length of Deceleration Section |
|---|---|---|---|---|---|---|---|
| 1 | Chinese character | Default | Default | Default | Default | Default | Default |
| 2 | Chinese character | Default | Default | Default | Walls change from white to blue to white, with a white ceiling | Default | Default |
| 3 | Chinese character | Default | Default | Default | Walls change from white to white to blue, with a black ceiling | Default | Default |
| 4 | Chinese character | Default | Default | Default | Default | Transverse | Default |
| 5 | Chinese character | Default | Default | Default | Default | Default | 80 |
| 6 | Chinese character | Default | Default | Default | Default | Default | 40 |
| 7 | Chinese pinyin | Default | Default | Default | Default | Default | Default |
| 8 | Chinese character | Add a sign 250 m from the exit | Default | Default | Default | Default | Default |
| 9 | Chinese character | Default | Add road information | Default | Default | Default | Default |
| 10 | Chinese character | Default | Default | Add a side-approach reminder | Default | Default | Default |
| Section | Key Point Position | Section Range |
|---|---|---|
| Entrance | (−9, −265) | 100 m in front of entrance and 50 m behind entrance: (−15, −365) to (−6, −215) |
| DC1 | (48, 167) | 50 m before and after the DC1: (23, 124) to (83, 203) |
| DC2 | (163, 270) | 50 m before and after the DC2: (124, 237) to (202, 302) |
| Exit | (458, 490) | 50 m before and after the exit: (416, 462) to (503, 514) |
| Type | Mean Values | Standard Deviation | Standard Error of the Mean | Upper 95% Confidence Limit | Lower 95% Confidence Limit |
|---|---|---|---|---|---|
| V | 21.78 | 21.78 | 7.684 | 0.01662 | 21.82 |
| a | −0.1036 | −0.1036 | 1.438 | 0.003111 | −0.09748 |
| Gp | 0.1849 | 0.1849 | 0.2412 | 0.0005219 | 0.1859 |
| : | −0.2993 | −0.2993 | 1.047 | 0.002062 | −0.2952 |
| m | 0.2862 | 0.2862 | 1.242 | 0.002687 | 0.2914 |
| σ | 0.9703 | 0.9703 | 0.4786 | 0.06769 | 1.106 |
| l | 0.1873 | 0.1873 | 0.08282 | 0.01171 | 0.2109 |
| Nominal Variables | Design Schemes |
|---|---|
| Types of deceleration section | Longitudinal, lateral |
| Length of deceleration section | 40 m, 60 m, 80 m |
| Sign at entrance section | Default, add information |
| Sign at exit section | Default, add density |
| DC1 | Default, add a side approach reminder |
| DC2 | Default, add road section information |
| Wall color | Default, the walls are white, blue, and white with a white ceiling; the walls are white, white, and blue with a black ceiling |
| Variables | V of Entrance Section | V of DC 1 Section | a of Entrance Section | V of Exit Section |
|---|---|---|---|---|
| Sign at entrance section | <0.0001 | <0.0001 | 0.0067 | <0.0001 |
| Length of deceleration section | <0.0001 | <0.0001 | <0.0001 | <0.0001 |
| Type of deceleration section | <0.0001 | 0.7628 | <0.0001 | <0.0001 |
| Wall color | <0.0001 | 0.0254 | <0.0001 | <0.0001 |
| DC1 | <0.0001 | 0.353 | <0.0001 | |
| DC2 | <0.0001 | 0.0005 | ||
| Sign at exit section | <0.0001 |
| Variables | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| σ (m/s2) | 1.57 | 1.39 | 1.81 | 1.76 | 1.92 | 1.93 | 1.69 | 1.73 | 1.67 | 1.58 |
| Variables | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| l | 0.187 | 0.192 | 0.169 | 0.173 | 0.168 | 0.168 | 0.201 | 0.230 | 0.205 | 0.182 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Yang, Q.; Wang, A.; Gu, X. Vehicle Driving Safety of Underground Interchanges Using a Driving Simulator and Data Mining Analysis. Infrastructures 2024, 9, 28. https://doi.org/10.3390/infrastructures9020028
Liu Z, Yang Q, Wang A, Gu X. Vehicle Driving Safety of Underground Interchanges Using a Driving Simulator and Data Mining Analysis. Infrastructures. 2024; 9(2):28. https://doi.org/10.3390/infrastructures9020028
Chicago/Turabian StyleLiu, Zhen, Qifeng Yang, Anlue Wang, and Xingyu Gu. 2024. "Vehicle Driving Safety of Underground Interchanges Using a Driving Simulator and Data Mining Analysis" Infrastructures 9, no. 2: 28. https://doi.org/10.3390/infrastructures9020028
APA StyleLiu, Z., Yang, Q., Wang, A., & Gu, X. (2024). Vehicle Driving Safety of Underground Interchanges Using a Driving Simulator and Data Mining Analysis. Infrastructures, 9(2), 28. https://doi.org/10.3390/infrastructures9020028