
Multi-Parametric Delineation Approach for Homogeneous Sectioning of Asphalt Pavements †



Abstract
:1. Introduction
2. Multi-Parametric Delineation Approach Framework
- Metric formulation: a procedure was formulated to identify the parameters for homogeneous sectioning, pre-processing of data, formulation of a multi-parametric delineation index (MPDI) as a function of the identified parameters for sectioning, and calculation of the control limits for MPDI, which included mean, standard deviation, and the upper control limit (UCL) and the lower control limit (LCL) from the entire dataset.
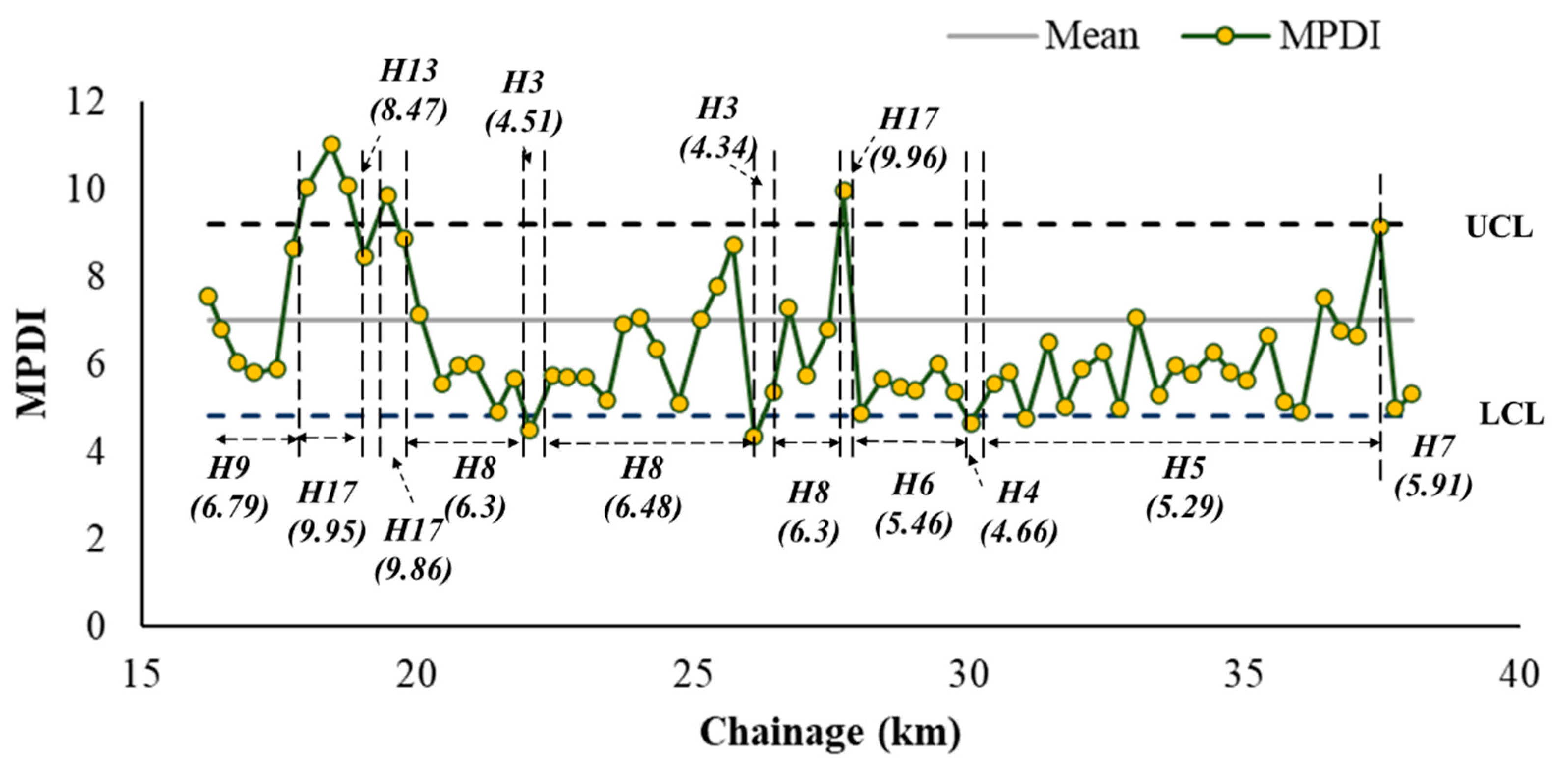
- C-charts-based MPDA: a process that was adopted to construct C-charts for MPDI for each road section in the dataset, which could identify the outlier data and help segment the sections between the outliers as homogeneous sections.
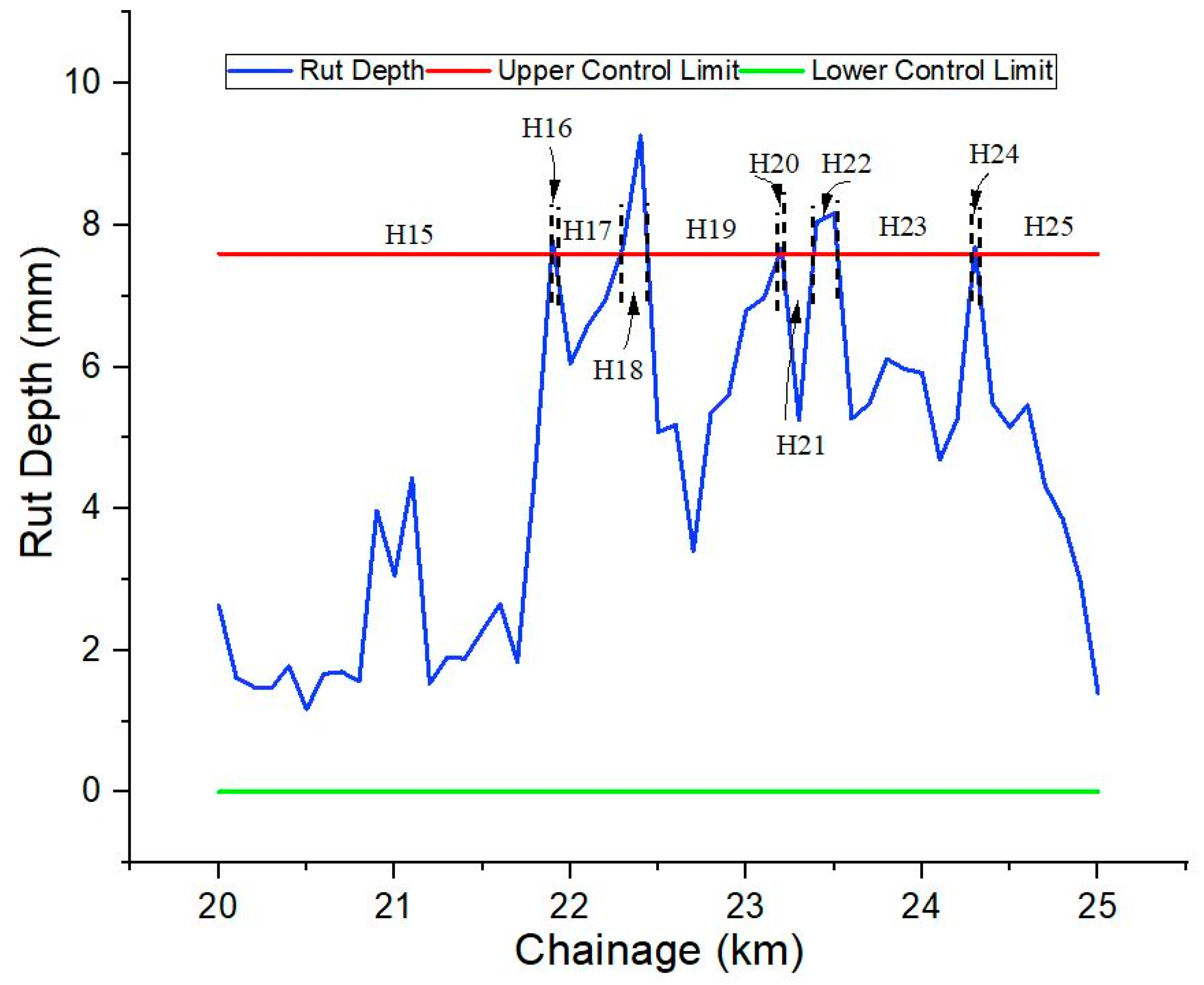
- Validation: a method was followed that used the CDA segmentation with roughness and rutting, while also earmarking the homogeneous sections with roughness and rutting using the C-charts method, and finally the results of these methods were compared (CDA and C-charts) against the MPDA results.
3. Multi-Parametric Delineation Index
- Pavement condition reported in terms of UPHI;
- Pavement peak deflection;
- BLI, MLI, and LLI;
- Traffic reported as annual average daily traffic (AADT);
- Modulus of elasticity of the surface layer (E).
3.1. Dataset and Pre-Processing
- Computation of UPHI for each segment of the road sections from the extent of the current distress and severity levels, as detailed by the authors in [25];
- Calculation of mean deflections, BLI, MLI, and LLI from deflection data;
- Assessment of E from deflection readings.
3.2. MPDI Formulation
4. C-Charts Method-Based MPDA
5. Comparison of MPDI with CDA and C-Charts Methods
6. Automation of MPDA Method for Sectioning
- Estimations of normalized values of D0, BLI, MLI, and LLI from deflection readings (D0, D1, …, D8), and seating load;
- Measurements of E from the normalized deflection readings;
- Calculations of UPHI based on pavement condition;
- Development of MPDI for each segment;
- Segmentation of pavement sections based on mean MPDI using C-charts.
6.1. Computation of Normalized Deflection Bowl Parameters
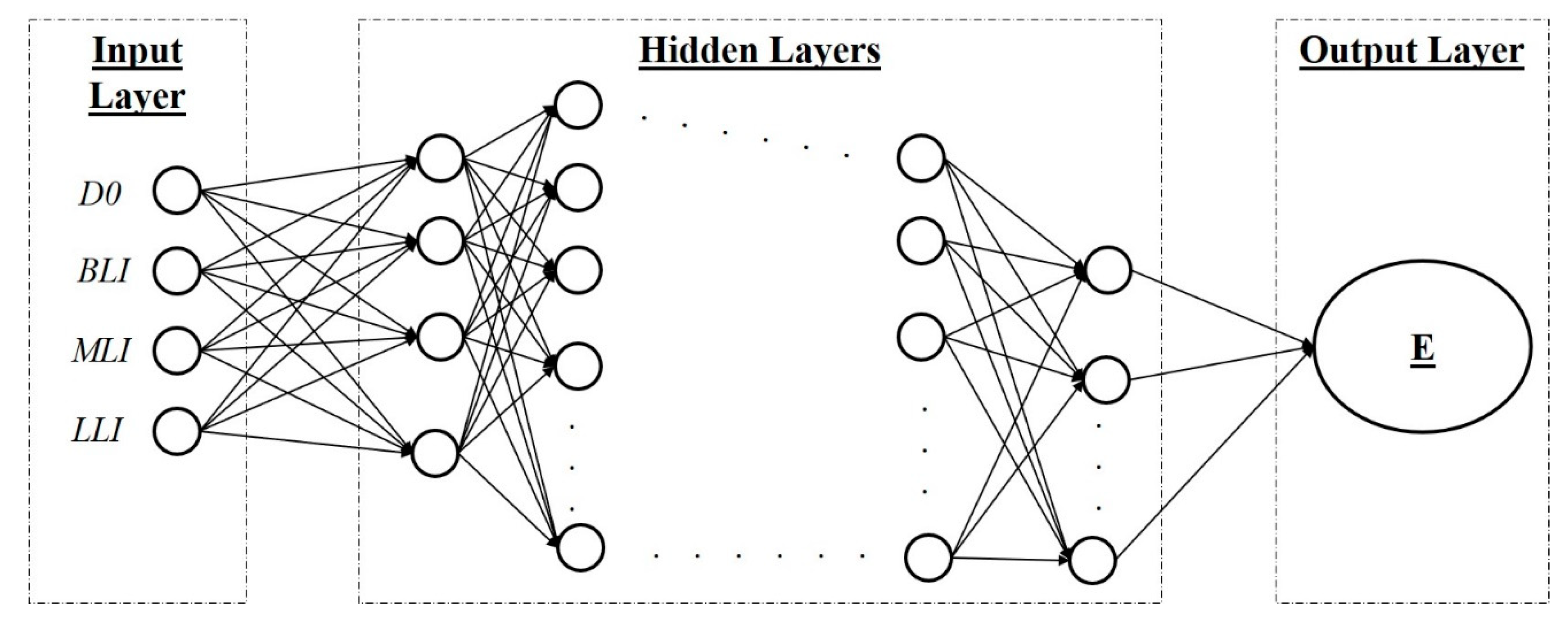
6.2. DNN Architecture for Estimating Surface Layer Modulus
- Learning rate: 0.01, 0.001, 0.0001, 0.00001, 0.005, 0.0005;
- Activation function for hidden layers: ReLU, linear, Leaky ReLU;
- Maximum number of hidden layers: 100;
- Minimum number of hidden layers: 1;
- Maximum number of neurons in each hidden layer: 20;
- Minimum number of neurons in each hidden layer: 2;
- Loss function: Mean squared error (MSE);
- Performance estimator: coefficient of determination (R2).
- Learning rate: 0.001;
- Activation function for hidden layers: ReLU;
- Number of hidden layers: 4;
- Number of neurons in each hidden layer: 4, 14, 9, 5.
6.3. Evaluation of UPHI from Surface Distresses
6.4. Homogeneous Sectioning Using MPDA
6.5. Research Significance
- Seven diverse parameters were considered for segmenting the pavements that have significant similar characteristics: peak deflection, BLI, MLI, LLI, UPHI, AADT, and E;
- Segmentation interval was dependent on the sample test length of the FWD studies;
- The developed Python code automatically segmented the sections from the input data;
- The developed sectioning approach is anticipated to help researchers and roadway management systems personnel in delineating the pavements based on most similar characteristics with a roadway network. The MPDI-based categorization will assist the decision makers in selecting the most feasible maintenance interventions for the project-level roadway systems. However, the minimum test length required for FWD measurements was 50 m, and hence, the system was not capable of predicting the homogeneous sections less than 50 m road length, which is one of the limitations of the study. However, the study could be extended by including the moduli of base and subgrade layers for segmentation purposes in future.
7. Conclusions and Recommendations
- Multiple parameters for segmentation: the parameters were found to be significantly interlinked with pavement deterioration and the corresponding structural and functional characteristics. Thus, a dimensionless parameter called MPDI was formulated with the normalized values of all these parameters for segmentation, which could be used to predict the deterioration pattern of the pavement sections.
- MPDI-based categorization for maintenance treatment selection: MPDI-based pavement maintenance selection scale was defined, which will provide insights to the roadway practitioners to select appropriate maintenance interventions for the designated homogeneous sections.
- Automation of the delineation process: the DNN developed in this study would serve as a one-stop solution for pavement segmentation, which will potentially help the practitioners for project-level maintenance applications.
- Recommendations and future scope: The multi-parametric delineation approach developed in this research study considered seven parameters in order to obtain the homogeneous roadway segments using the C-charts-based approach. However, other pavement characteristics must also be incorporated in future for better segmentation and validated using the proposed method.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Meaning |
| AADT | Annual average daily traffic |
| AASHTO | American Association of State Highway and Transportation Officials |
| ADA | Absolute difference approach |
| AI | Artificial intelligence |
| APRDC | Andhra Pradesh Road Development Corporation |
| BLI | Base layer index |
| CART | Classification and regression trees |
| CDA | Cumulative difference approach |
| DNN | Deep neural network |
| E | Modulus of elasticity of surface layer |
| FWD | Falling weight deflectometer |
| IRI | International roughness index |
| LCL | Lower control limit |
| LLI | Lower layer index |
| MLI | Middle layer index |
| MPDA | Multi-parametric delineation approach |
| MPDI | Multi-parametric delineation index |
| MSE | Mean squared error |
| R2 | Coefficient of determination |
| UCL | Upper control limit |
| UPHI | Unified pavement health index |
References
- ASCE. USA Report Card, 2017 ASCE Infrastructure Report Card—Roads; ASCE: Reston, VA, USA, 2023. [Google Scholar]
- International Transport Forum. Transport Infrastructure Investment and Maintenance Spending. 2023. Available online: https://stats.oecd.org/Index.aspx?datasetcode=ITF_INV-MTN_DATA (accessed on 1 February 2021).
- Invest India, Roadways in India—Road Industry, Network, Projects & FDI, Invest India—National Investment Promotion and Facilitation Agency. <Roadways in India—Road Industry, Network, Projects & FDI (investindia.gov.in)> (February 2023).
- Misra, R.; Das, A. Identification of homogeneous sections from road data. Int. J. Pavement Eng. 2013, 4, 229–233. [Google Scholar] [CrossRef]
- Thomas, F. Generating Homogeneous Road Sections Based on Surface Measurements: Available Methods. In Proceedings of the 2nd European Pavement and Asset Management Conference, Berlin, Germany, 21–23 March 2004; 48. [Google Scholar]
- Eddula, S.V.; Peraka, N.S.P.; Biligiri, K.P. A Smart Bi-Parametric Approach for Homogeneous Delineation of Rural Roads. In Proceedings of the COSVARD 2020 International Conference, Guwahati, India, 7–8 December 2020. [Google Scholar]
- Peraka, N.S.P.; Biligiri, K.P. Pavement asset management systems and technologies: A review. Autom. Constr. 2020, 119, 103336. [Google Scholar] [CrossRef]
- Thomas, F. Statistical Approach to Road Segmentation. J. Transp. Eng. 2003, 129, 300–308. [Google Scholar] [CrossRef]
- Tejeda, S.V.; Echaveguren, T. Proposal of a Segmentation Procedure for Skid Resistance Data. Arab. J. Sci. Eng. 2008, 33, 89–104. [Google Scholar]
- El-Gendy, A.; Shalaby, A. Using Quality Control Charts to Segment Road Surface Condition Data. In Proceedings of the 7th International Conference on Managing Pavement Assets, Calgary, AB, Canada, 23–28 June 2008. [Google Scholar]
- Cafiso, S.; Di Graziano, A. Definition of Homogenous Sections in Road Pavement Measurements. Procedia-Soc. Behav. Sci. 2012, 53, 1069–1079. [Google Scholar] [CrossRef]
- AASHTO. AASHTO Guide for Design of Pavement Structures; American Association of State Highway and Transportation Official: Washington, DC, USA, 1993. [Google Scholar]
- IRC. IRC Guidelines for Structural Evaluation and Strengthening of Flexible Road Pavements Using Falling Weight Deflectometer (FWD) Technique, IRC 115:2015. In Proceedings of the Indian Roads Congress, New Delhi, India, 19 January 2015. [Google Scholar]
- Ping, W.V.; Yang, Z.; Gan, L.; Dietrich, B. Development of Procedure for Automated Segmentation of Pavement Rut Data. Transp. Res. Rec. 1999, 1655, 65–73. [Google Scholar] [CrossRef]
- Zhao, H.; Lea, J.; Harvey, J.; Lea, J. Pavement Structure Segmentation Method based on Results derived from Ground-Penetrating Radar Data. Int. J. Pavement Eng. 2012, 14, 333–342. [Google Scholar] [CrossRef]
- Ahmed, A.; David, J. An Enhanced Framework for Dynamic Segmentation of Pavement Sections. Leadership in Sus. Infrastruct. Canada. 2017. Available online: https://www.csce.ca/elf/apps/CONFERENCEVIEWER/conferences/2017/pdfs/CONSPEC/FinalPaper_86.pdf (accessed on 1 February 2021).
- Biswas, S.; Kuna, K. Optimal Change-Point Analysis of Pavement Condition Data for Identification of Homogeneous Sections. J. Transp. Eng. Part B. Pavements 2023, 149, 04022078. [Google Scholar] [CrossRef]
- Haider, S.W.; Varma, S. Another Look at Delineation of Uniform Pavement Sections based on Falling Weight Deflectometer Deflections Data. Can. J. Civ. Eng. 2016, 43, 40–50. [Google Scholar] [CrossRef]
- Donev, V.; Hoffmann, M. Optimisation of Pavement Maintenance and Rehabilitation Activities, Timing, and Work Zones for Short Survey Sections and Multiple Distress Types. Int. J. Pavement Eng. 2018, 21, 583–607. [Google Scholar] [CrossRef]
- Donev, V.; Hoffmann, M.; Blab, R. Aggregation of Condition Survey Data in Pavement Management: Shortcomings of a Homogeneous Sections Approach and How to Avoid Them. Struct. Infrastruct. Eng. 2021, 17, 49–61. [Google Scholar] [CrossRef]
- The Global Economy. Business and Economic Data for 200 Countries—Roads Quality—Country Rankings 2019. Available online: https://www.theglobaleconomy.com/rankings/roads_quality/European-union/ (accessed on 1 September 2023).
- Abdelaty, A.; Attia, O.G.; Jeong, H.D.; Gelder, B.K. Dynamic Pavement Delineation and Visualization Approach Using Data Mining. J. Comput. Civ. Eng. 2018, 32, 04018019. [Google Scholar] [CrossRef]
- Mukhtarli, K.; Nik-Bakht, M.; Amador-Jimenez, L. Data-driven Homogeneous Pavement Groups—Soft Versus Hard Clustering. Int. J. Pavement Res. Technol. 2023, 16, 1135–1157. [Google Scholar] [CrossRef]
- Horak, E.; Emery, S. Falling Weigh Deflectometer Bowl Parameters as Analysis Tool for Pavement Structural Evaluations. In Proceedings of the 22nd ARRB Conference: Research into Practice, Canberra, ACT, Australia, 29 October–2 November 2006. [Google Scholar]
- Peraka, N.S.P.; Biligiri, K.P.; Kalidindi, N.S. Unified Pavement Health Index: Comprehensive and Robust Approach to Measure Functional Condition of Asphalt Pavement Systems. J. Transp. Eng. Part B. Pavements 2023, 149, 04023022. [Google Scholar] [CrossRef]
- Anagun, A.S. Special Control Charts. In Industrial Engineering Applications and Practices: Users Encyclopedia; Eskisehir Osmangazi University: Eskisehir, Turkey, 1999; ISBN 09654599-0-X. [Google Scholar]
- Montgomery, D.C. Introduction to Statistical Quality Control, 6th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Shewhart, W.A. Statistical Method from the Viewpoint of Quality Control; Dover Publications: Mineola, NY, USA, 2012. [Google Scholar]
- Amin, S.G. Control Charts 101: A Guide to Healthcare Applications. Qual. Manag. Health Care 2001, 9, 1–27. [Google Scholar] [CrossRef] [PubMed]
- Khan, N.; Aslam, M.; Jun, C.H. Design of Control Chart Using a Modified EWMA Statistic. Qual. Reliab. Eng. Int. 2016, 33, 1095–1104. [Google Scholar] [CrossRef]
- Jannat, G.E.; Henning, T.F.; Zhang, C.; Tighe, S.L.; Ningyuan, L. Road section length variability on pavement management decision making for Ontario, Canada, highway systems. Transp. Res. Rec. 2016, 2589, 87–96. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean (μ) | Standard Deviation (s) | UCL (μ + 2 s) | LCL (μ − 2 s) |
|---|---|---|---|
| 7 | 2.1992 | 14.3683 | 2.6016 |
| Mean MPDI | Homogeneous Section Classification | Mean MPDI | Homogeneous Section Classification | Mean MPDI | Homogeneous Section Classification |
|---|---|---|---|---|---|
| 3.0–3.4 | H0 | 8.2–8.6 | H13 | 13.0–13.4 | H25 |
| 3.4–3.8 | H1 | 8.6–9.0 | H14 | 13.4–13.8 | H26 |
| 3.8–4.2 | H2 | 9.0–9.4 | H15 | 13.8–14.2 | H27 |
| 4.2–4.6 | H3 | 9.4–9.8 | H16 | 14.2–14.6 | H28 |
| 4.6–5.0 | H4 | 9.8–10.2 | H17 | 14.6–15.0 | H29 |
| 5.0–5.4 | H5 | 10.2–10.6 | H18 | 15.0–15.4 | H30 |
| 5.4–5.8 | H6 | 10.6–11.0 | H19 | 15.4–15.8 | H31 |
| 5.8–6.2 | H7 | 11.0–11.4 | H20 | 15.8–16.2 | H32 |
| 6.2–6.6 | H8 | 11.4–11.8 | H21 | 16.2–16.8 | H33 |
| 6.6–7.0 | H9 | 11.8–12.2 | H22 | 16.8–17.0 | H34 |
| 7.0–7.4 | H10 | 12.2–12.6 | H23 | 17.0–17.4 | H35 |
| 7.4–7.8 | H11 | 12.6–13.0 | H24 | 17.4–17.8 | H36 |
| 7.8–8.2 | H12 |
| Mean MPDI | Maintenance Intervention | Indication |
|---|---|---|
| <4 | Preventive maintenance | P_M_I |
| 4 to 7 | Corrective maintenance | C_M_I |
| 7 to 10 | Minor rehabilitation | Mi_R_M_I |
| 10 to 14 | Major rehabilitation | Ma_R_M_I |
| >14 | Reconstruction | R_M_I |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peraka, N.S.P.; Biligiri, K.P.; Kalidindi, S.N. Multi-Parametric Delineation Approach for Homogeneous Sectioning of Asphalt Pavements. Infrastructures 2023, 8, 153. https://doi.org/10.3390/infrastructures8100153
Peraka NSP, Biligiri KP, Kalidindi SN. Multi-Parametric Delineation Approach for Homogeneous Sectioning of Asphalt Pavements. Infrastructures. 2023; 8(10):153. https://doi.org/10.3390/infrastructures8100153
Chicago/Turabian StylePeraka, Naga Siva Pavani, Krishna Prapoorna Biligiri, and Satyanarayana N. Kalidindi. 2023. "Multi-Parametric Delineation Approach for Homogeneous Sectioning of Asphalt Pavements" Infrastructures 8, no. 10: 153. https://doi.org/10.3390/infrastructures8100153
APA StylePeraka, N. S. P., Biligiri, K. P., & Kalidindi, S. N. (2023). Multi-Parametric Delineation Approach for Homogeneous Sectioning of Asphalt Pavements. Infrastructures, 8(10), 153. https://doi.org/10.3390/infrastructures8100153