Framework for Flexural Rigidity Estimation in Euler-Bernoulli Beams Using Deformation Influence Lines


Abstract
:
1. Introduction
- sensitivity to impairment,
- foundation in mechanical theory,
- consistency in the evaluation technique, and
- efficacy and efficiency of the technique in practice.
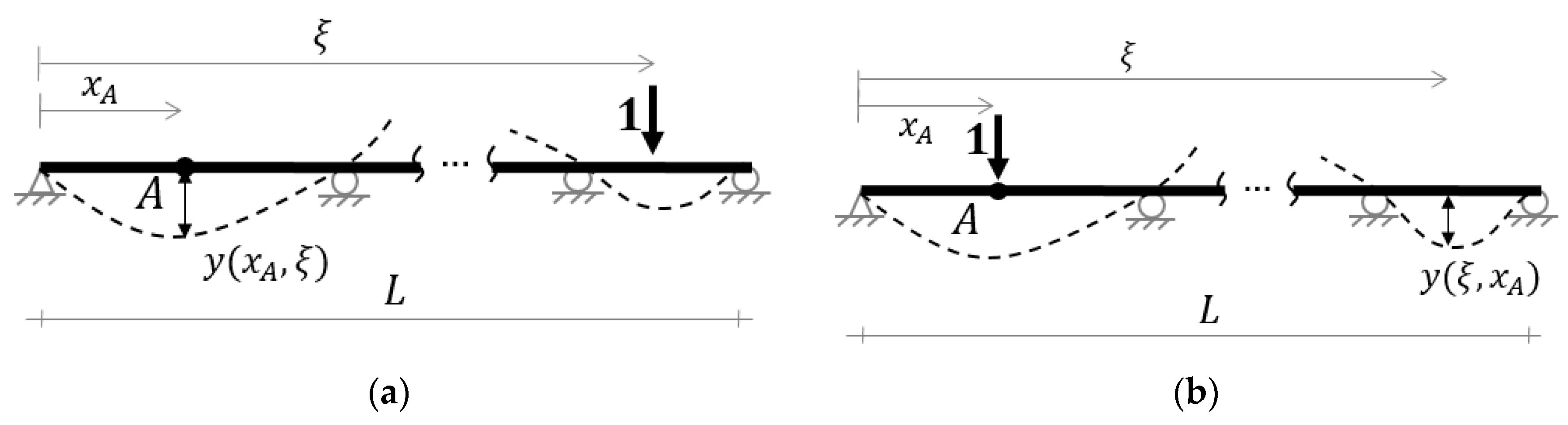
2. Influence Lines for Euler-Bernoulli Beam Evaluation
3. Flexural Rigidity Estimation (FRE)
3.1. Derivation for FRE
3.2. Alternate Derivation for FRE
4. Calculation of Moment
4.1. Statically Determinate Systems
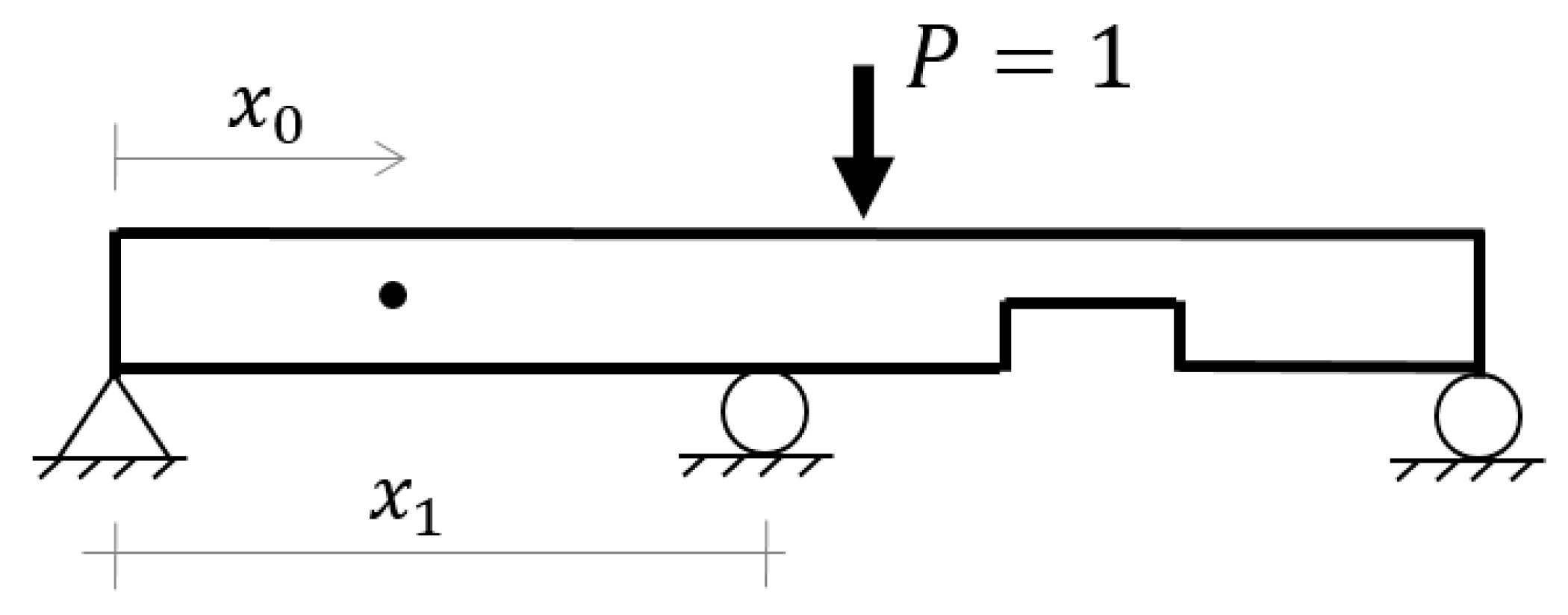
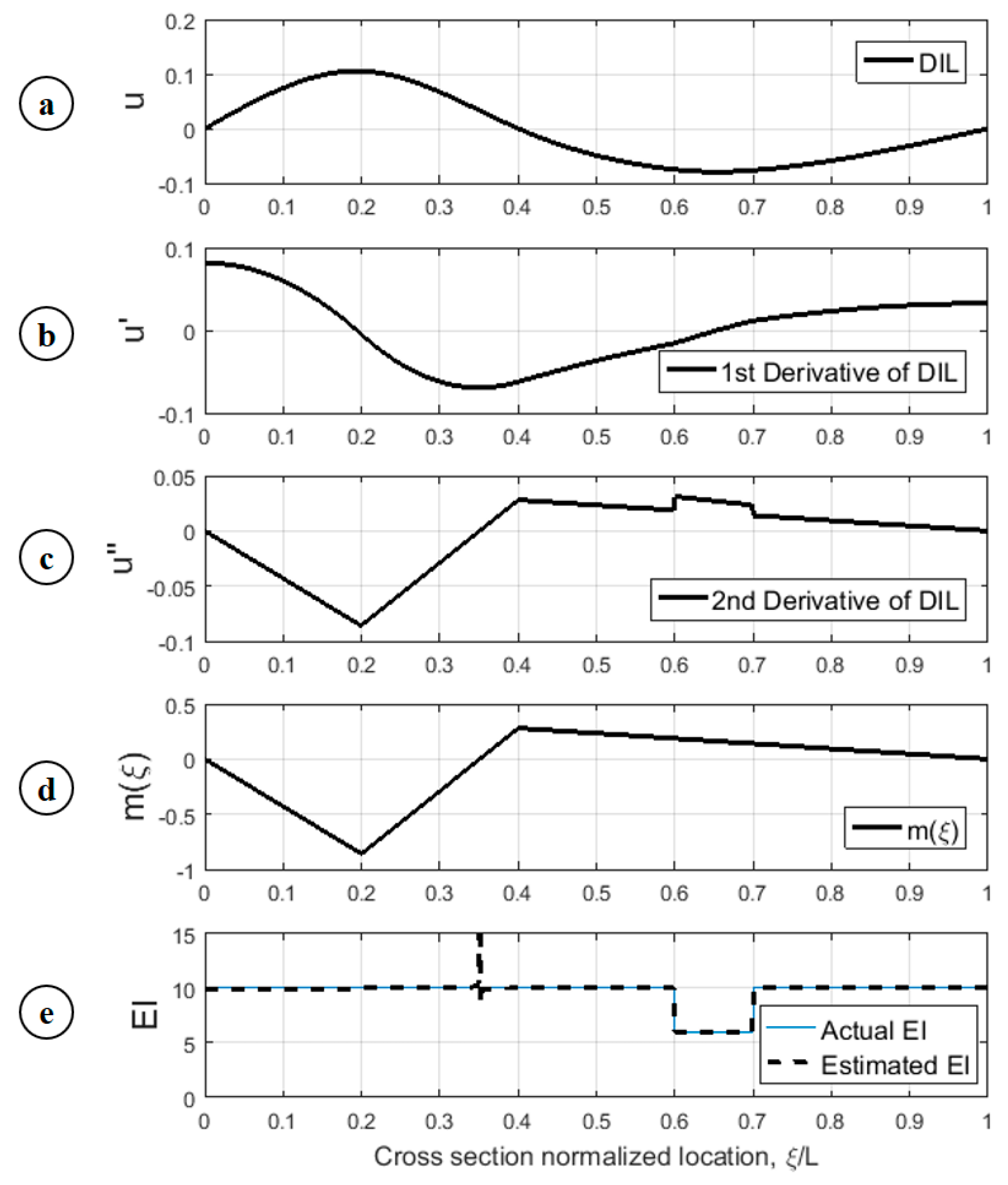
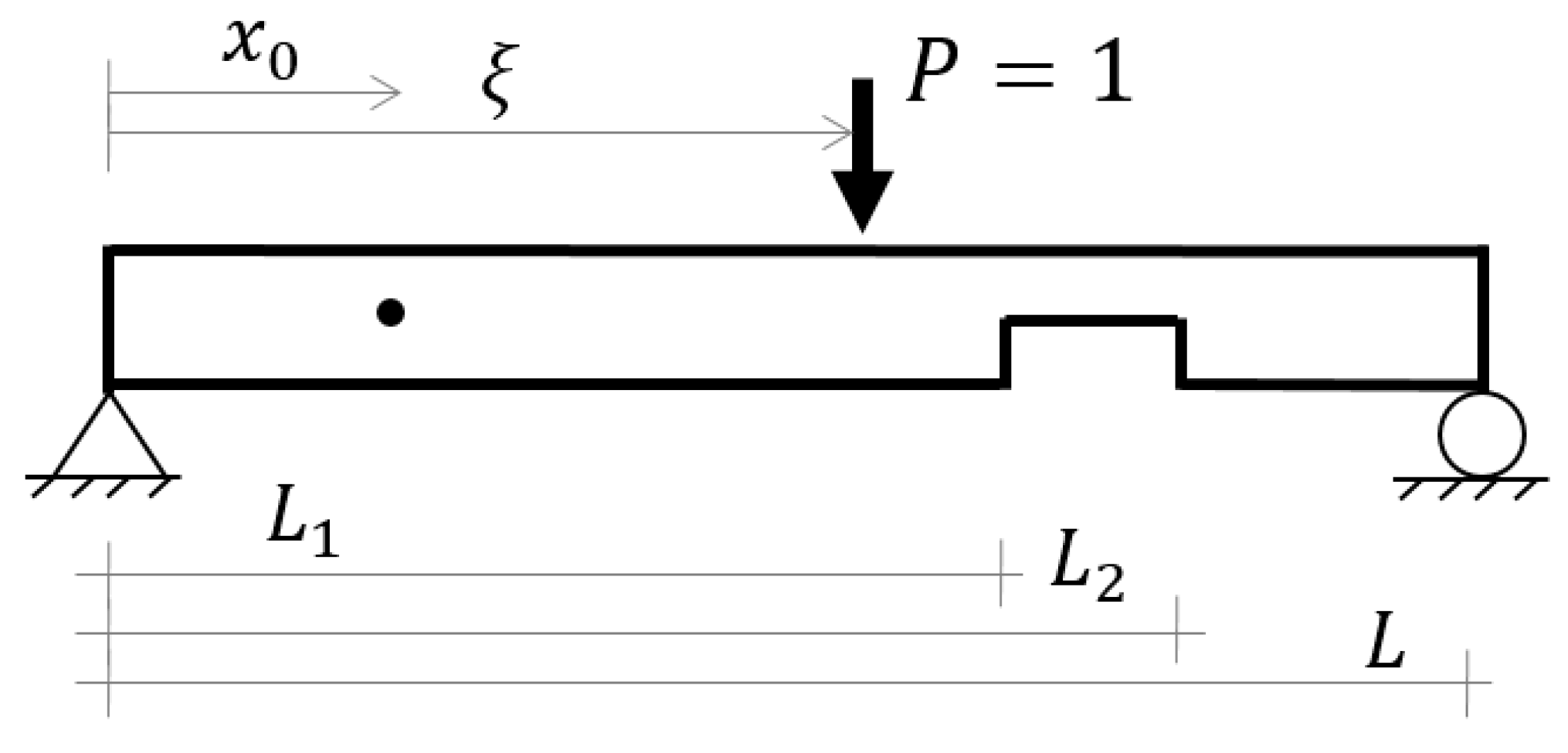
4.2. Statically Indeterminate Systems
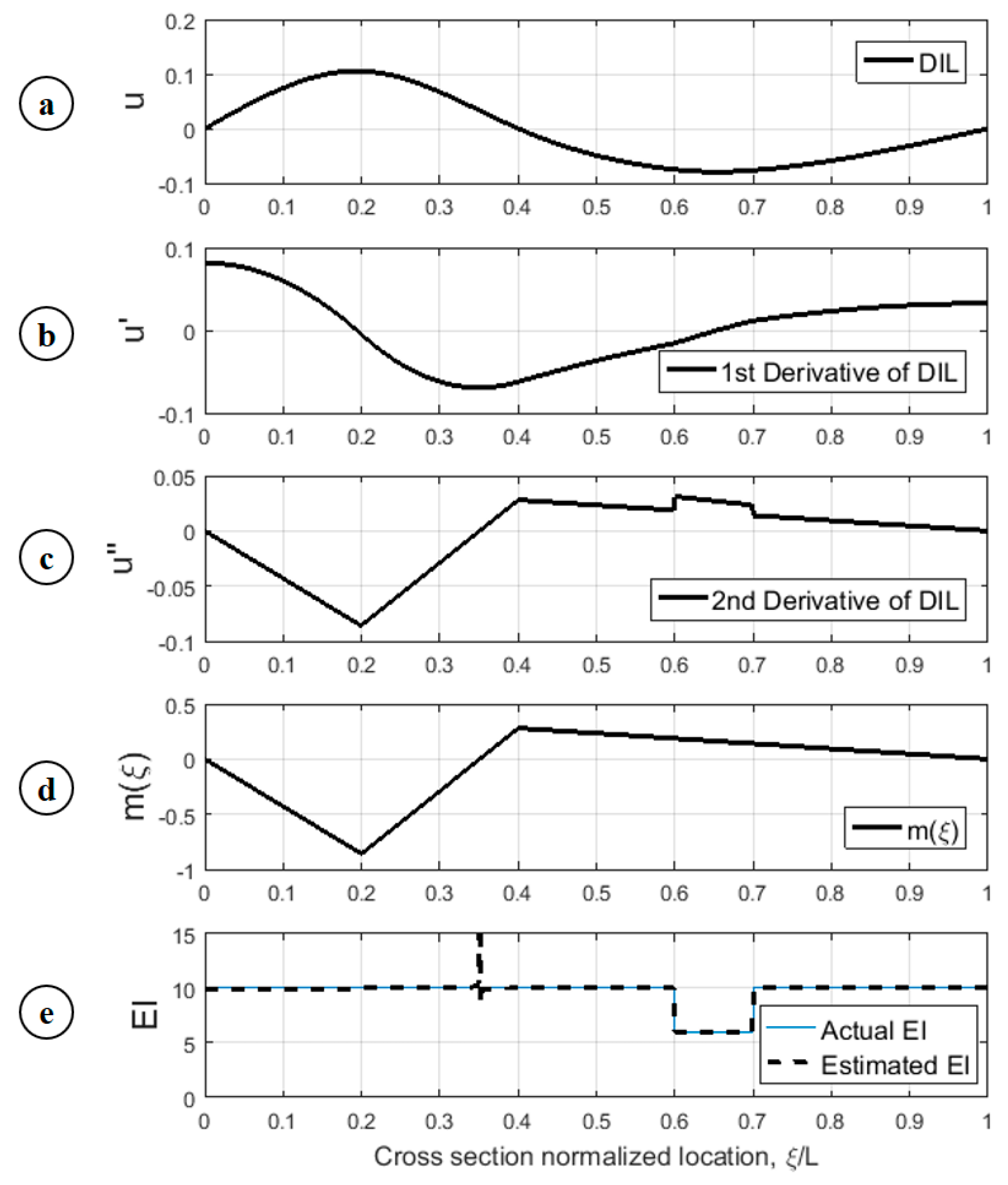
4.2.1. Deflection Influence Line (DIL)
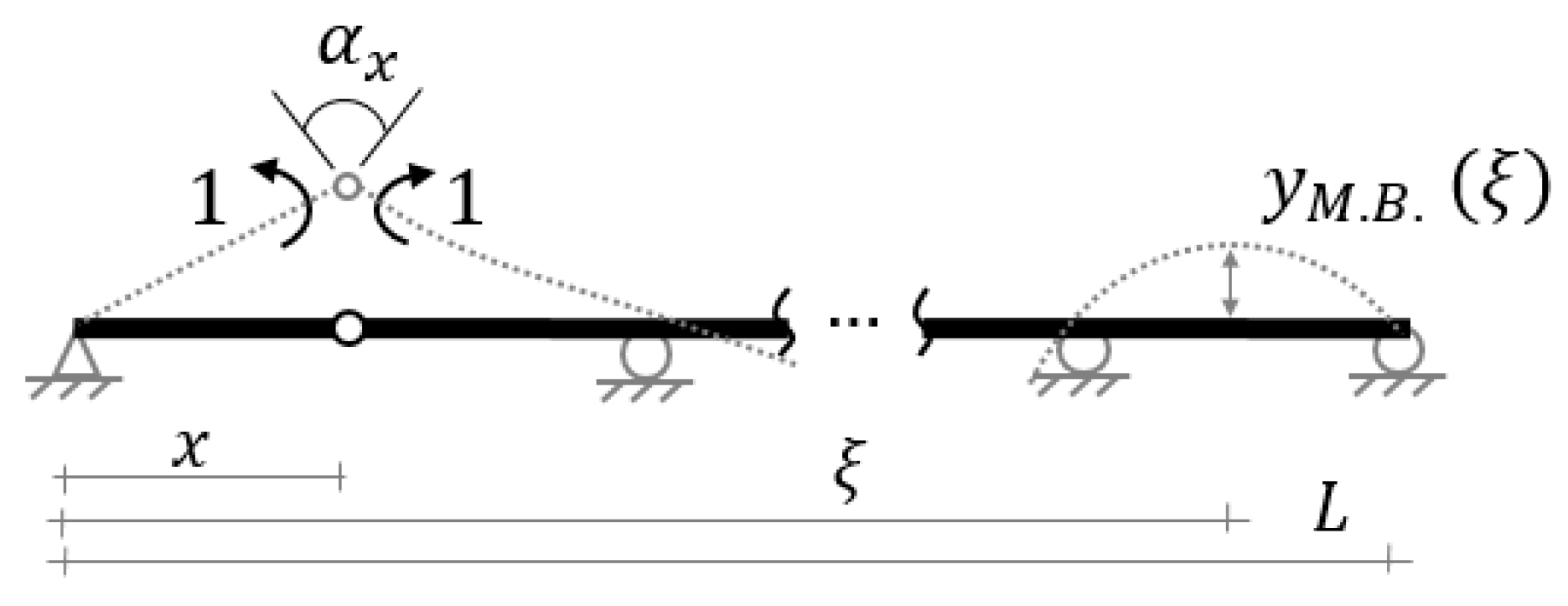
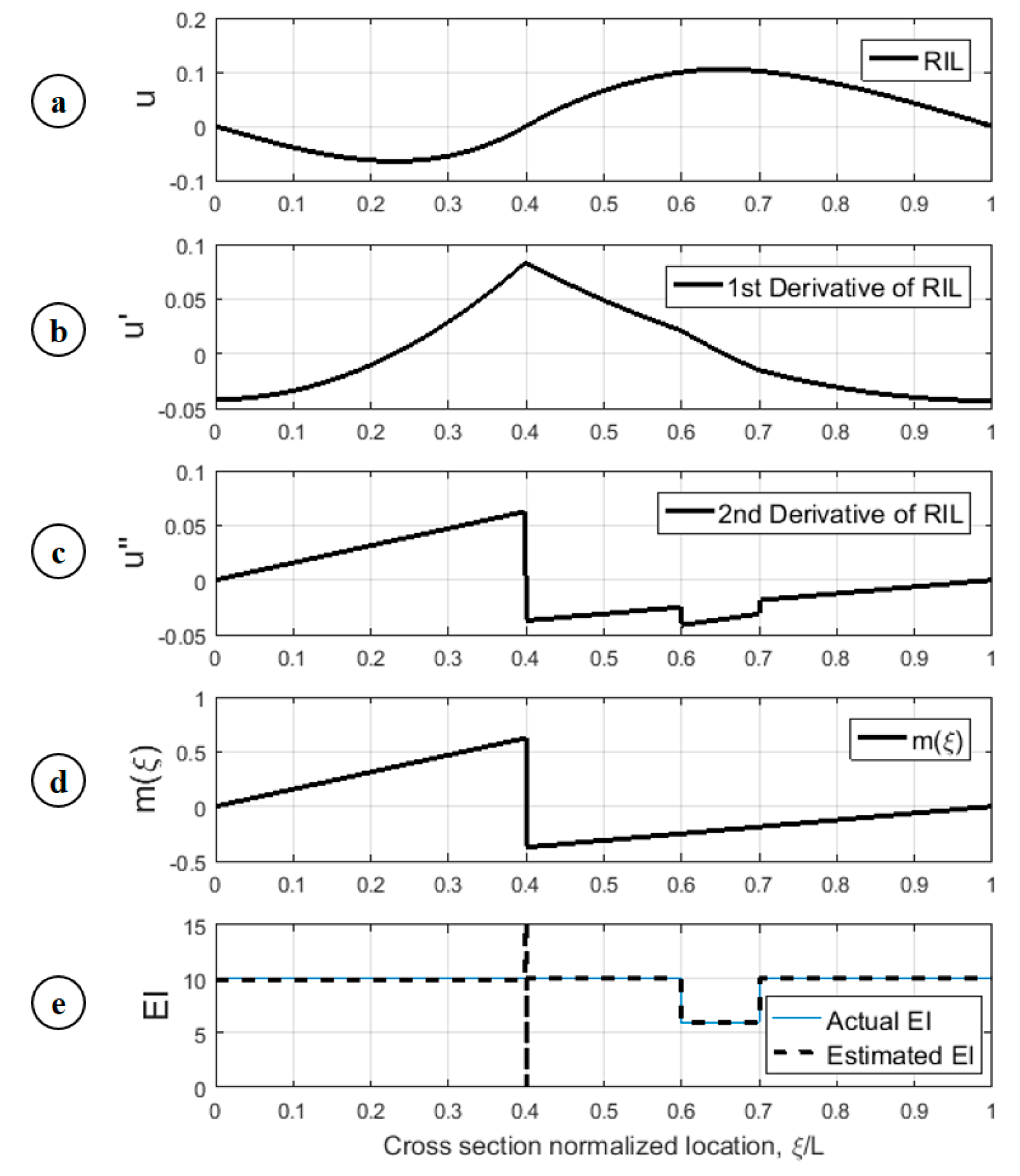
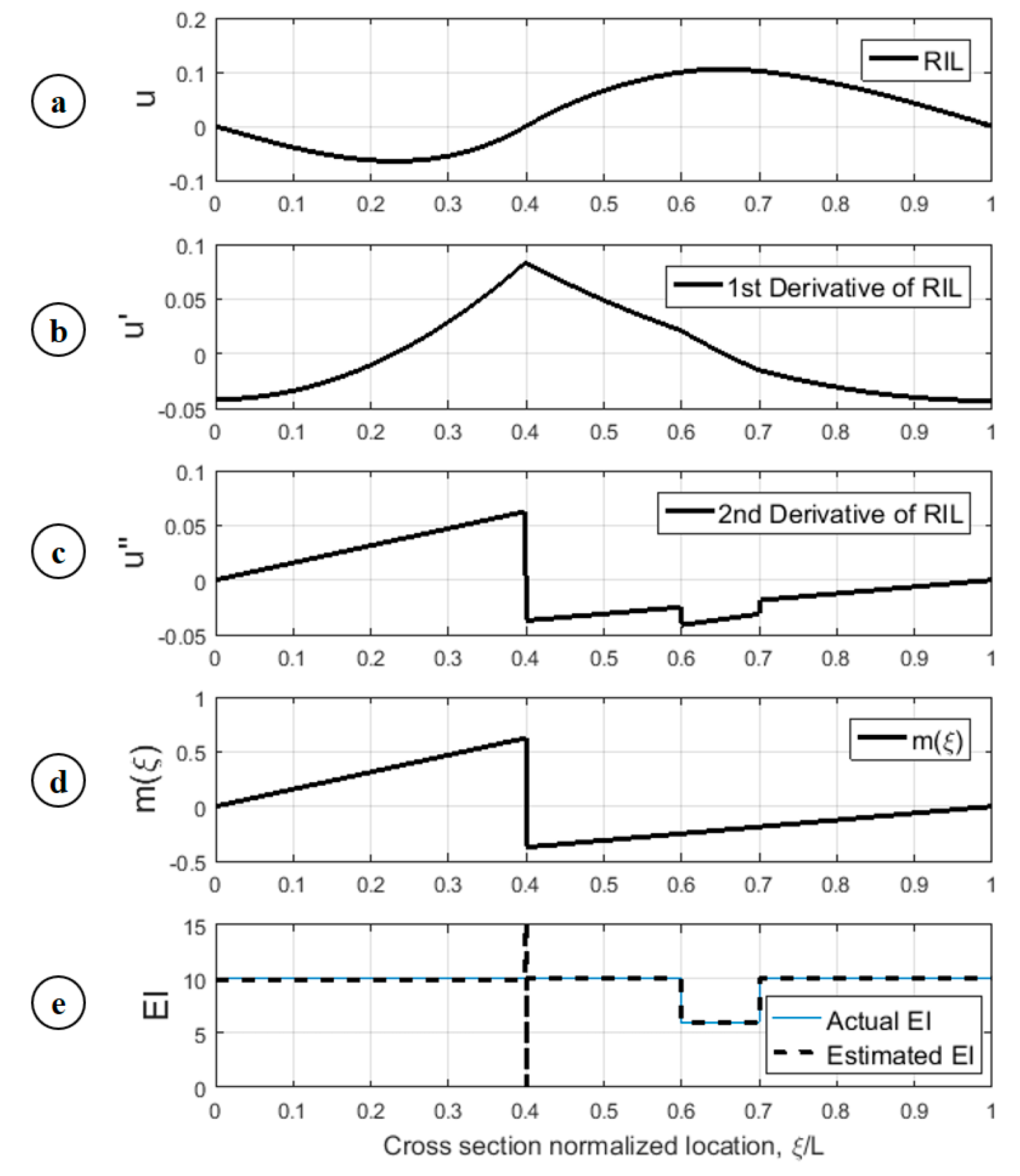
4.2.2. Rotation Influence Line (RIL)
5. Analytical Illustrations of the Method
5.1. Example I—Statically Determinate System
5.2. Example II—Statically Indeterminate Systems
5.2.1. Using Deflection Influence Line (DIL)
5.2.2. Using Rotation Influence Line (RIL)
6. Application
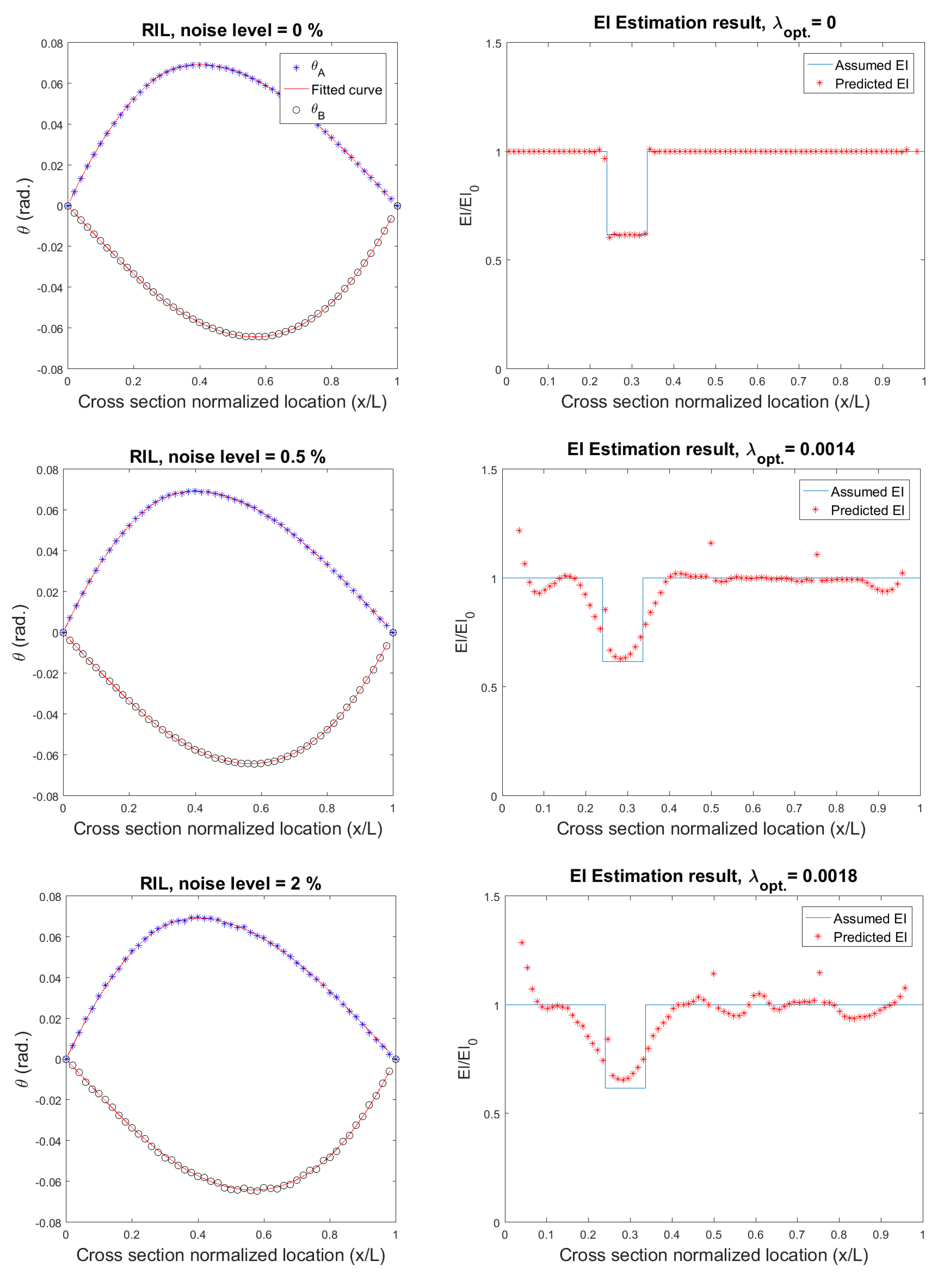
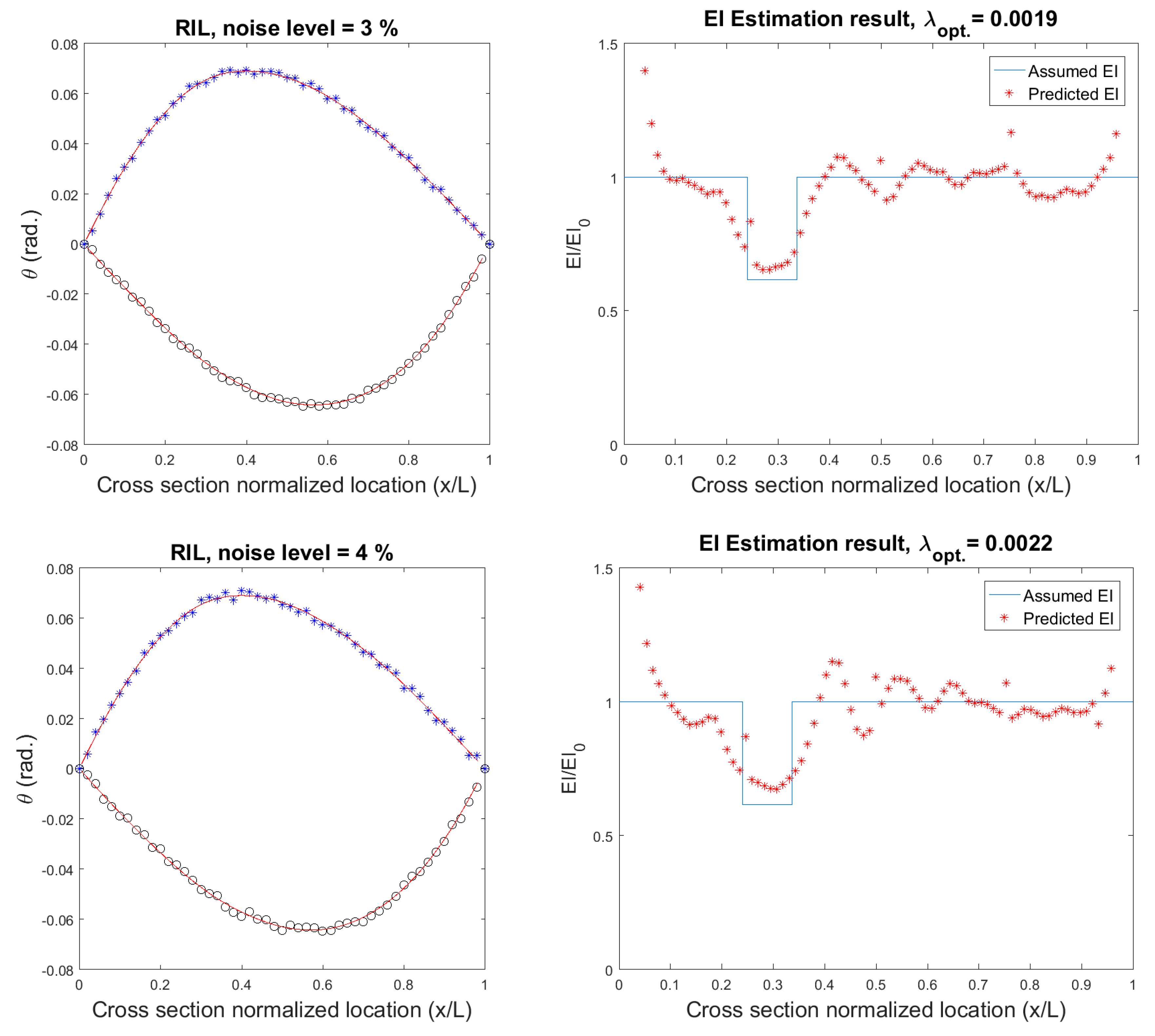
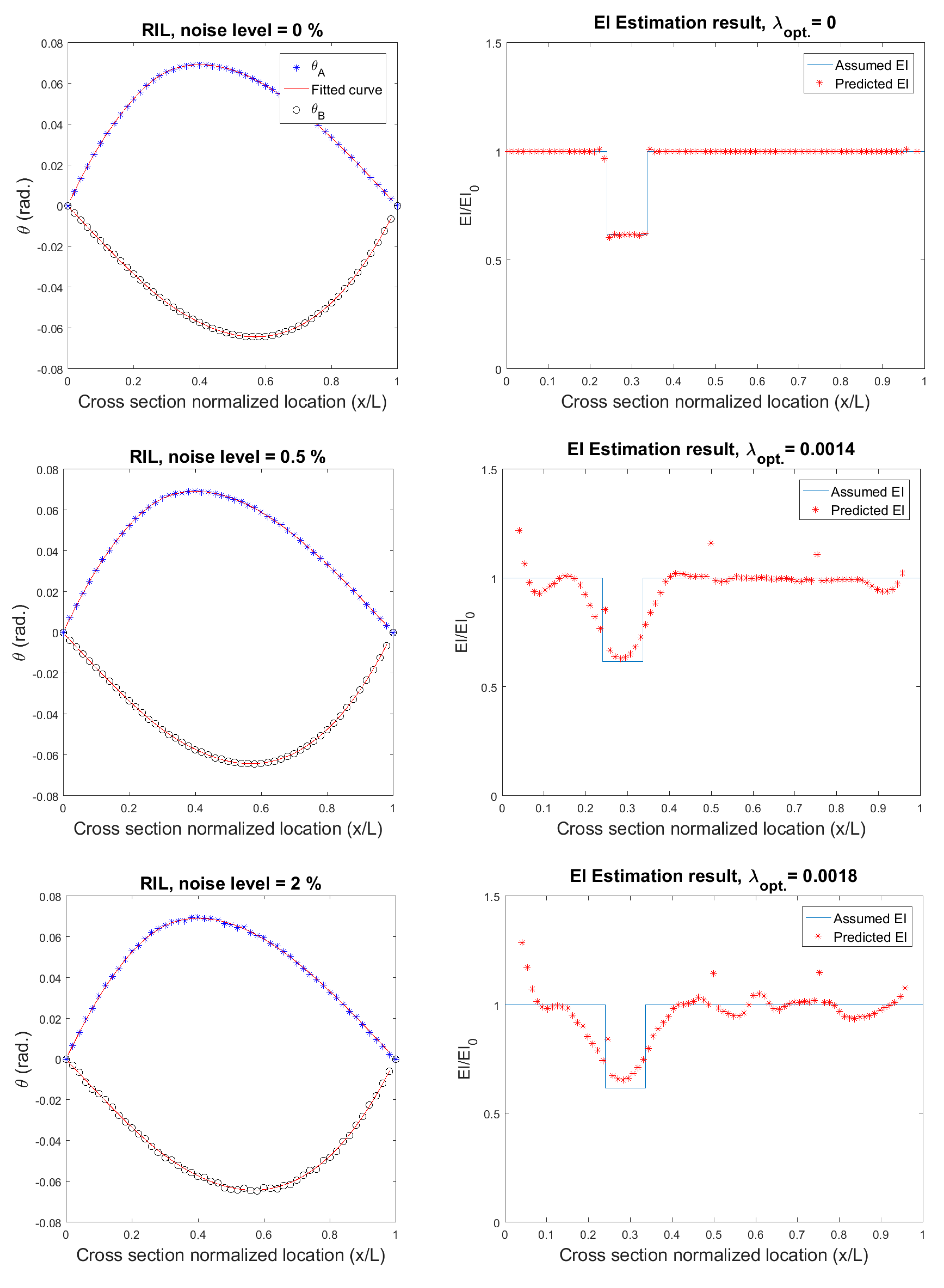
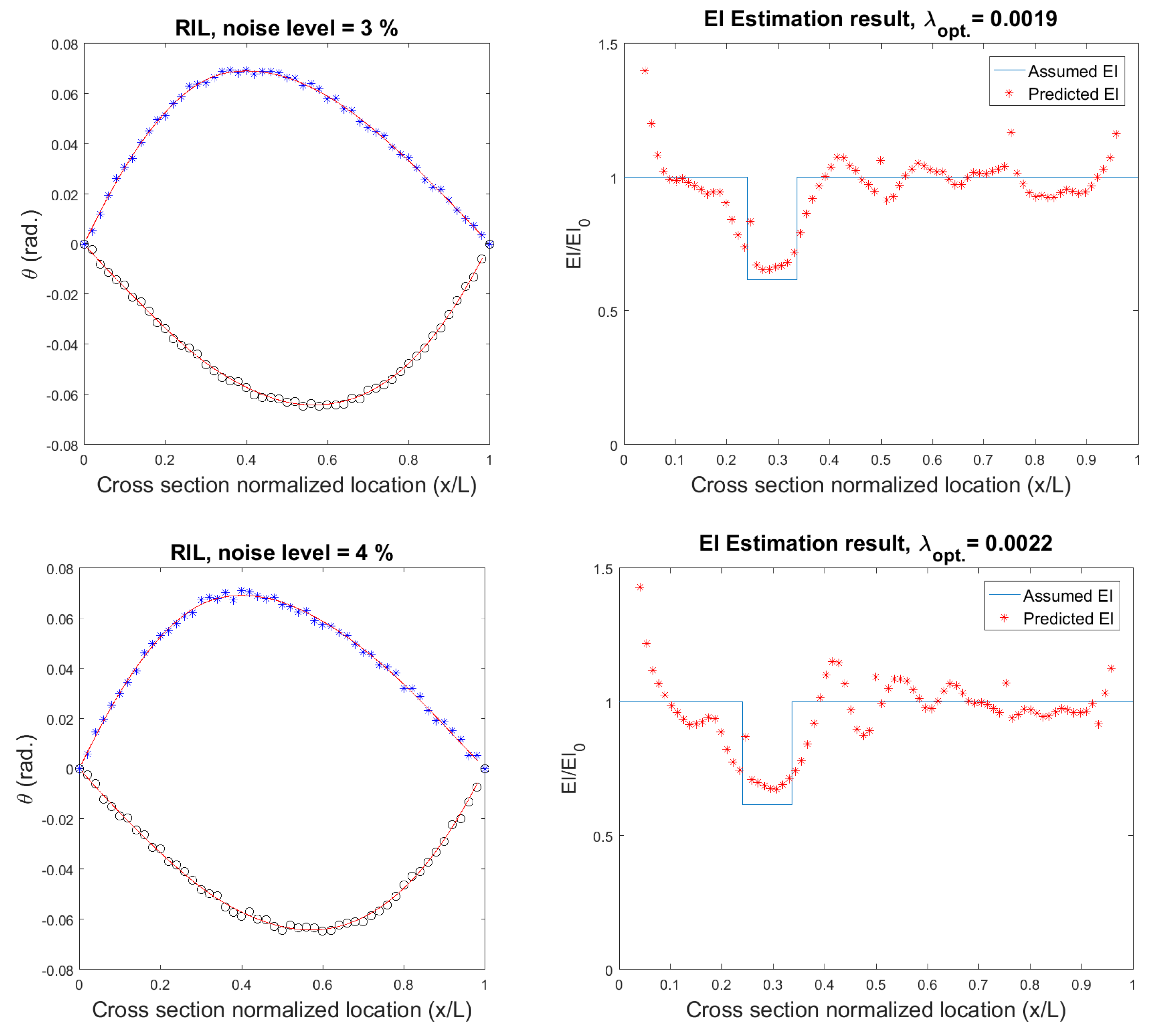
6.1. Algorithm for Addressing Noisy Measurements
- It will become zero at the location of each support.
- The value of the function and its first derivative would become equal at both the left- and right-hand boundaries of the considered pieces.
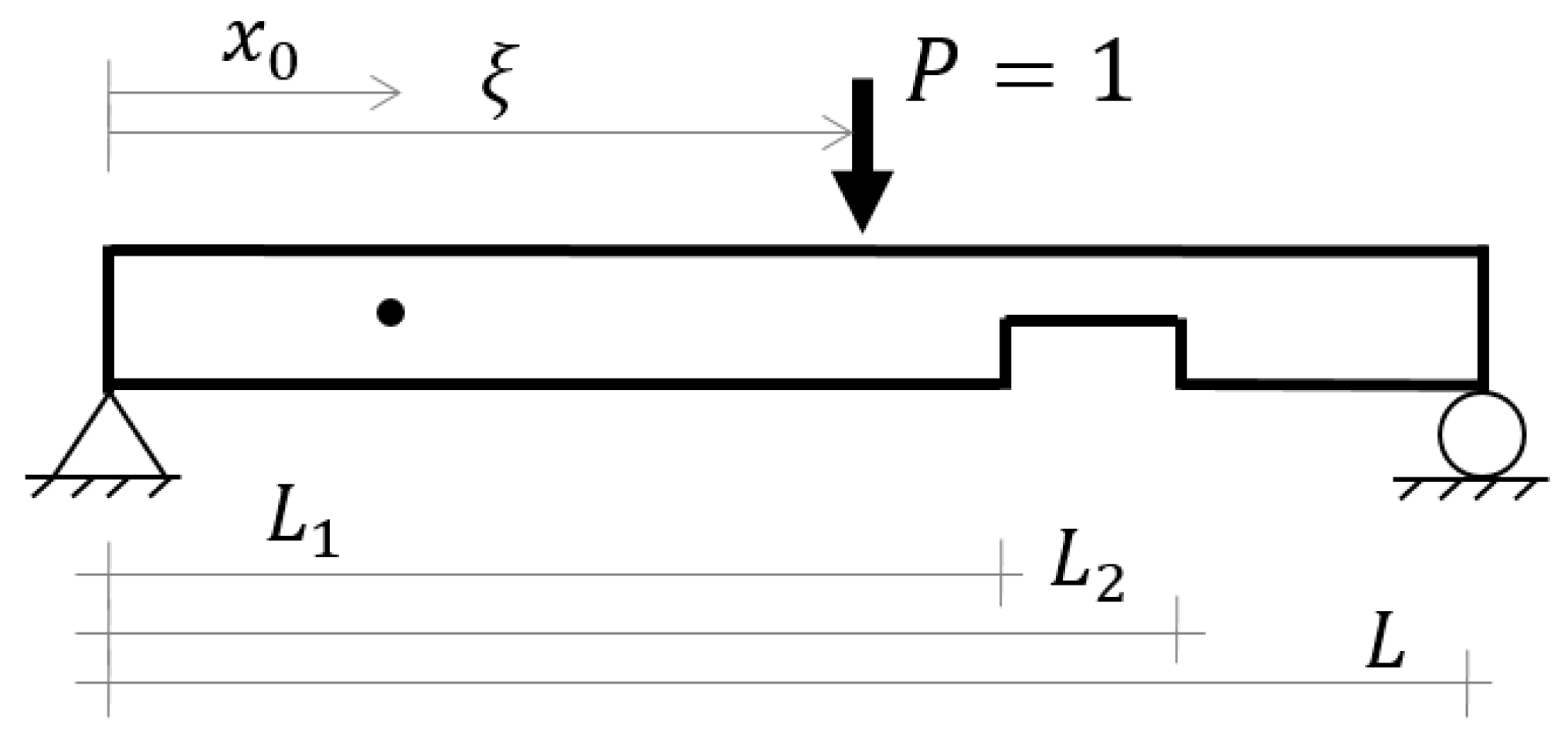
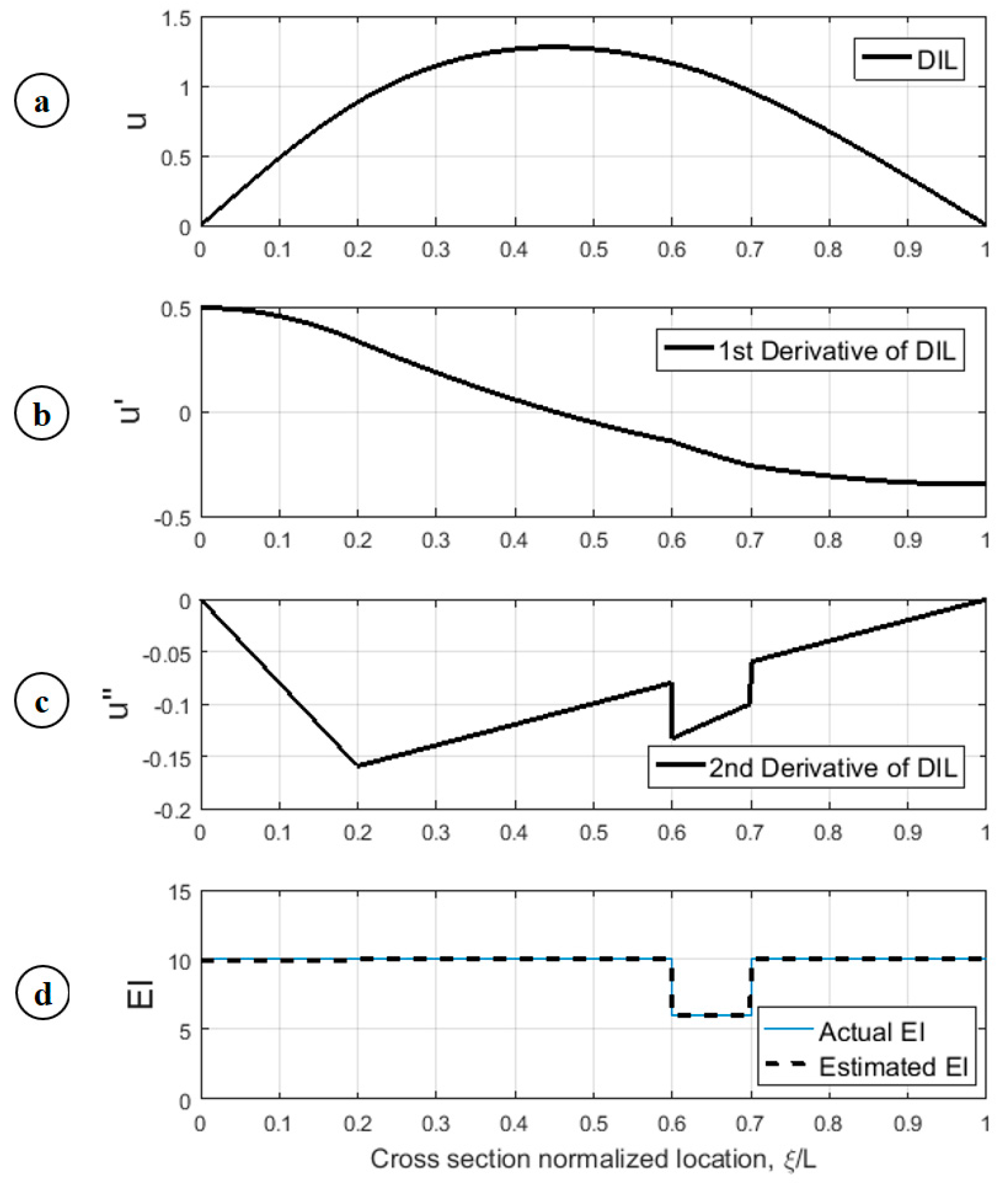
6.2. Application on a Numerical Model
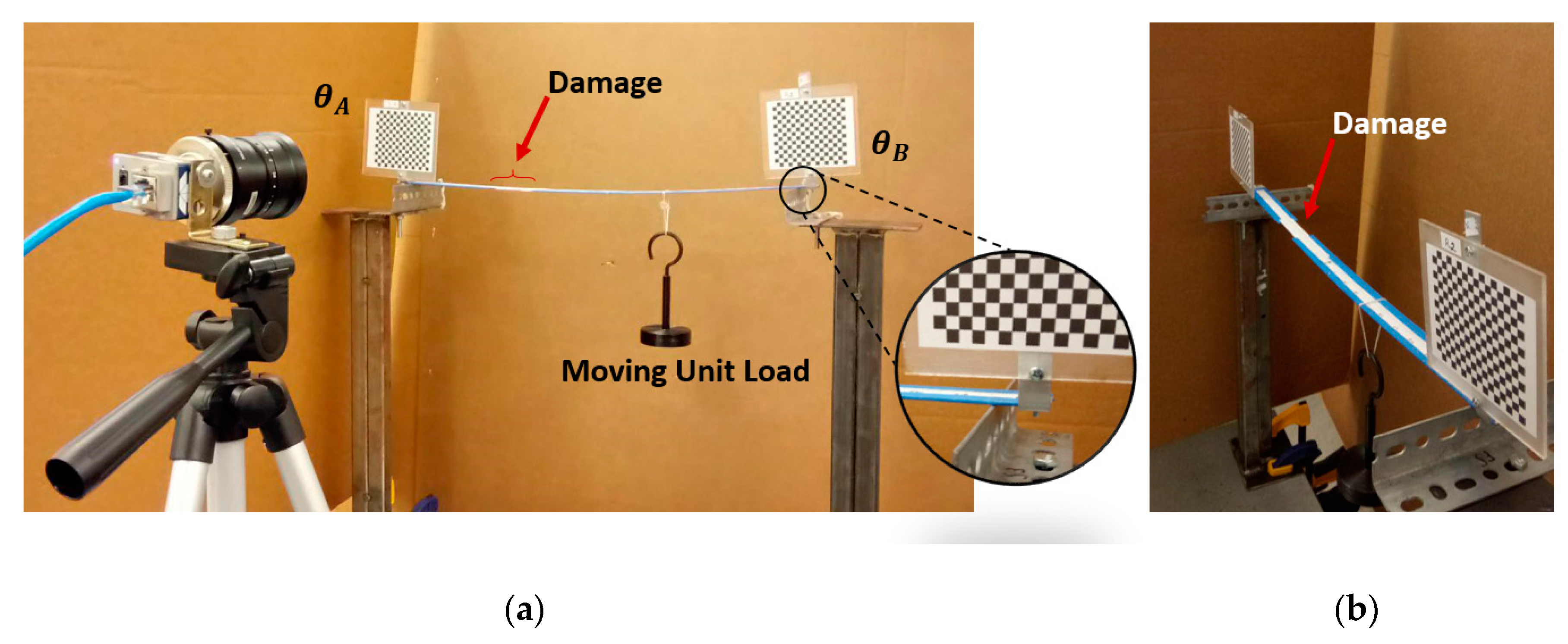
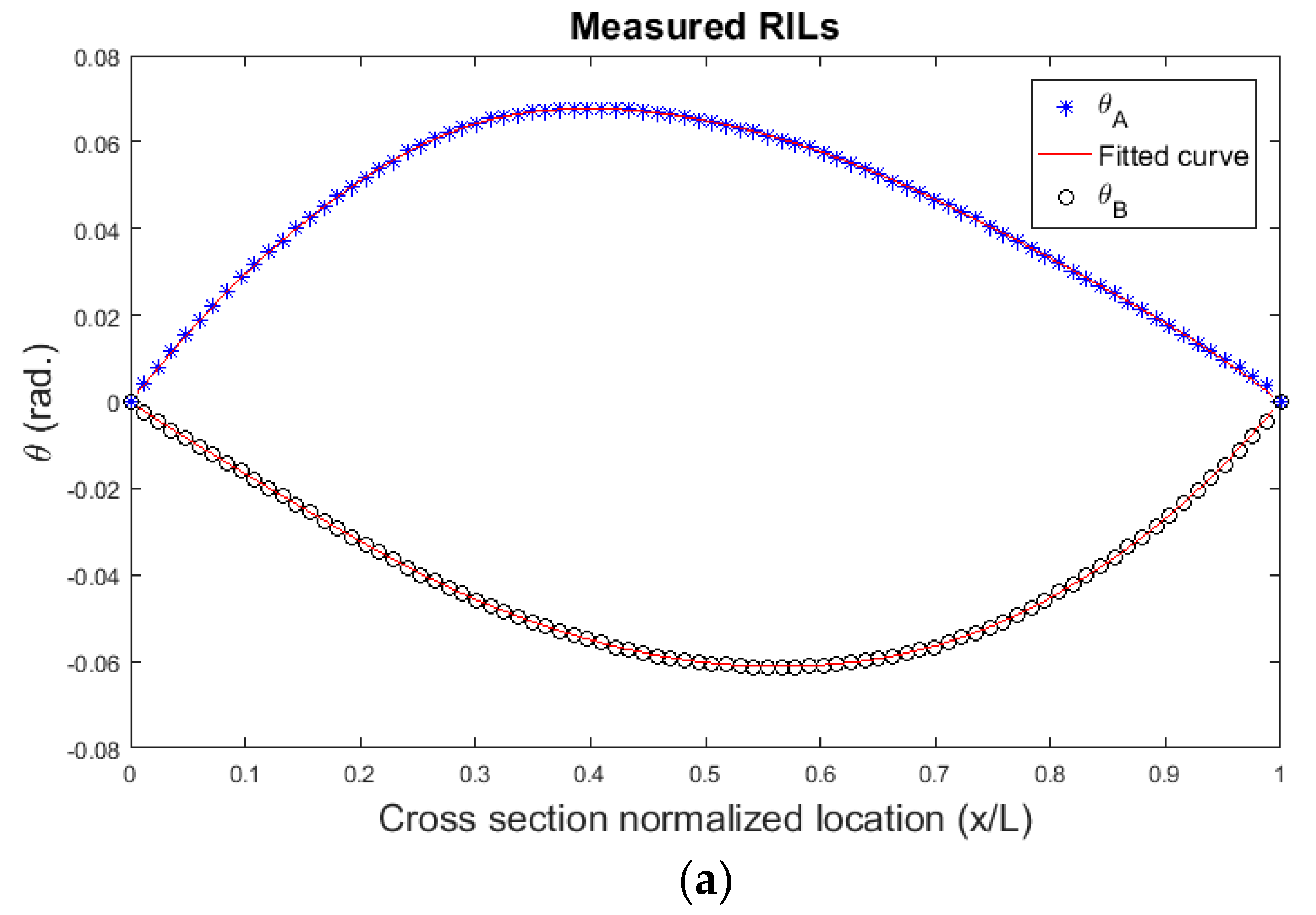
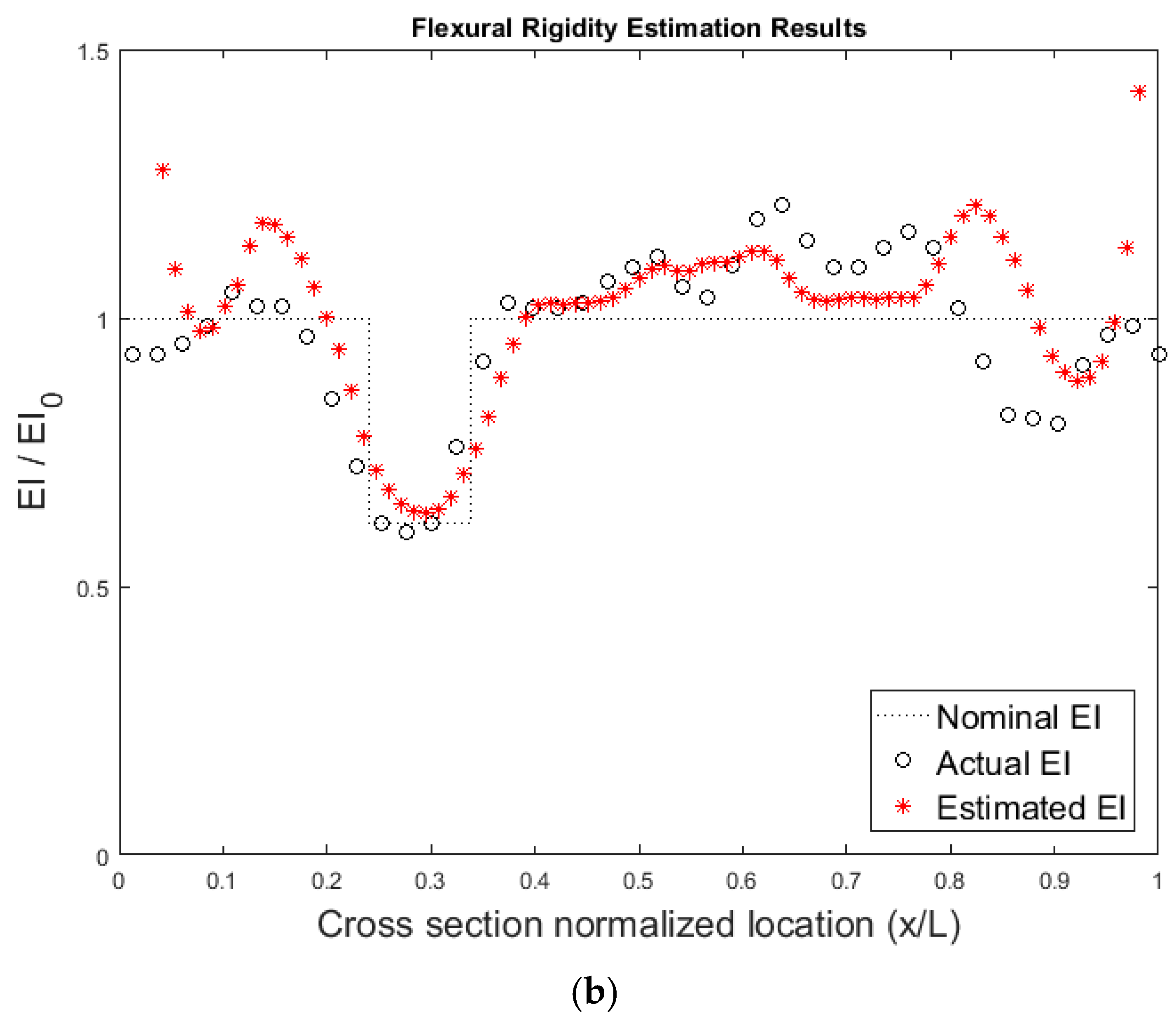
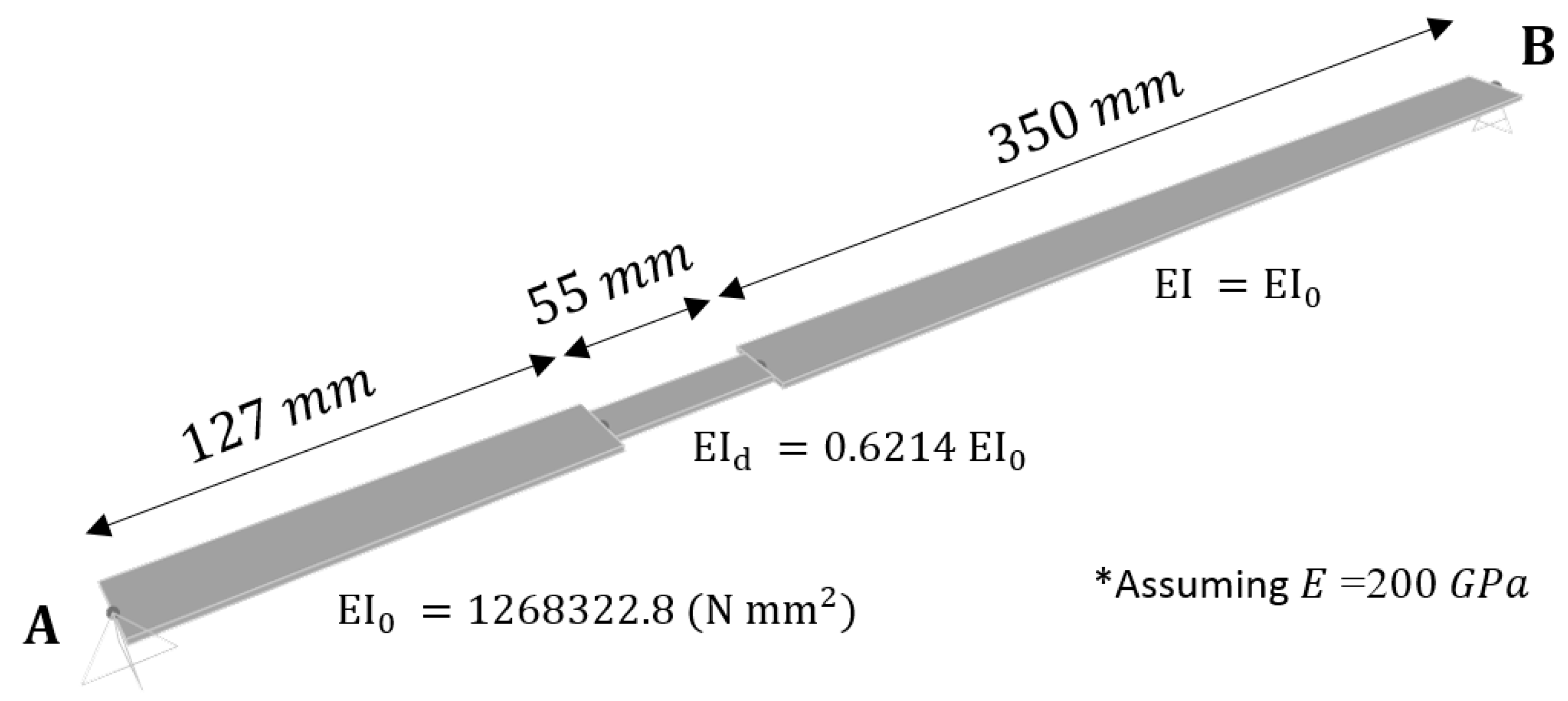
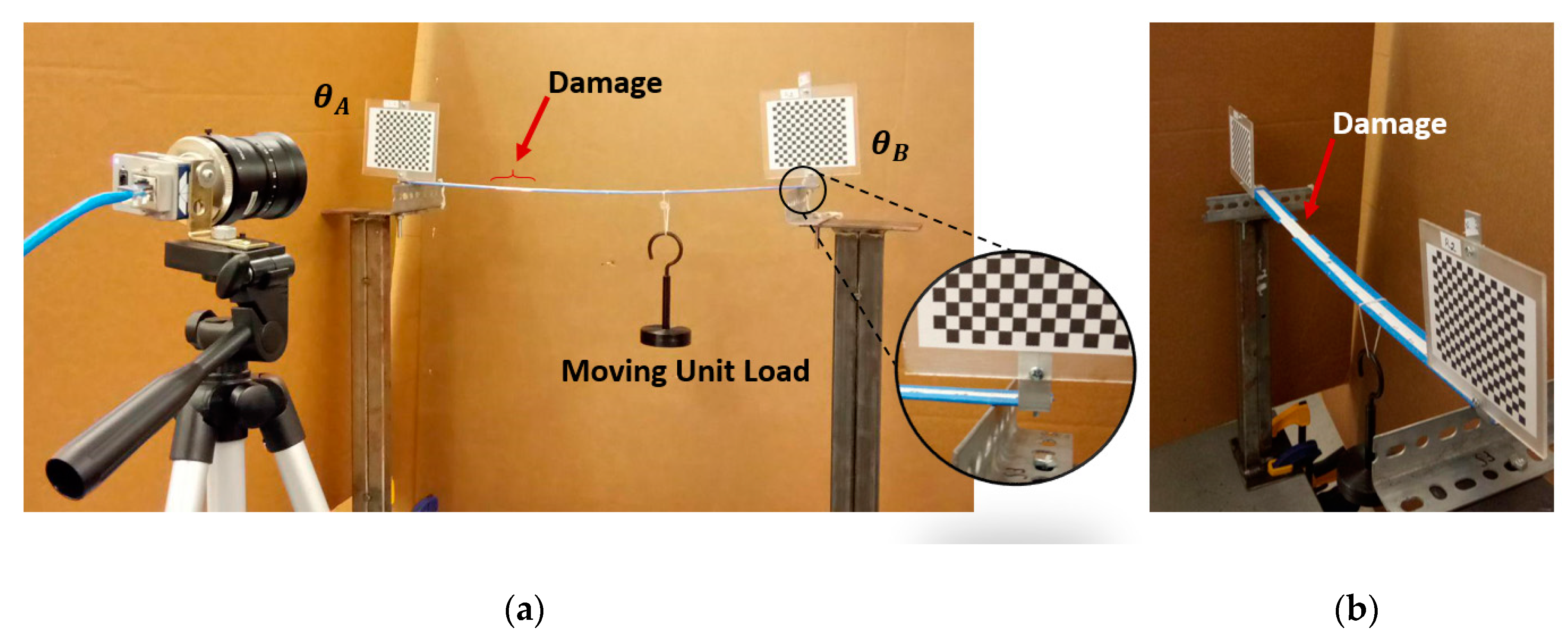
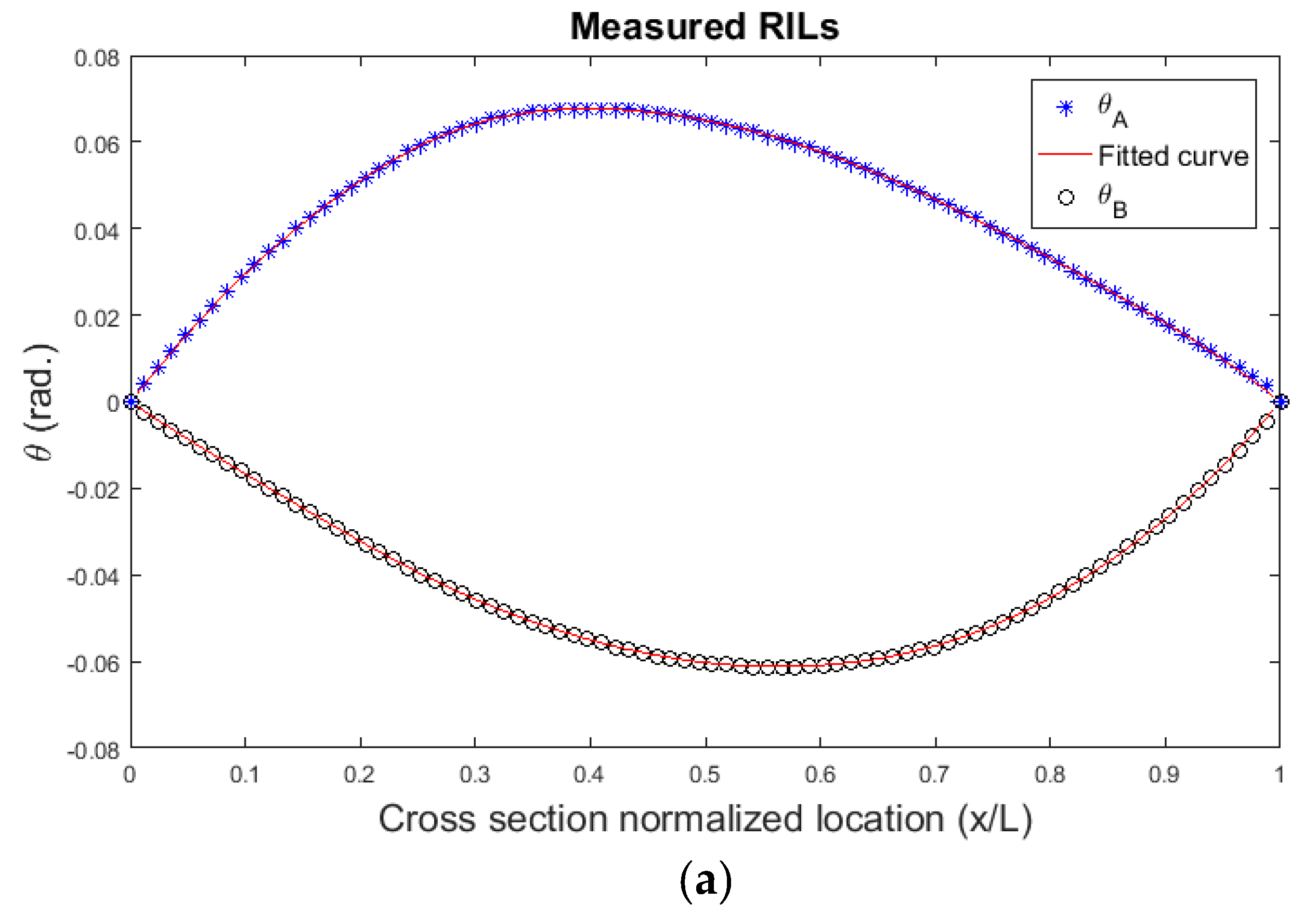
6.3. Application on a Real World System
7. Summary
Author Contributions
Conflicts of Interest
Appendix A
References
- American Society of Civil Engineers (ASCE). Report Card for America’s Infrastructure; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017; Available online: http://www.infrastructurereportcard.org (accessed on 1 February 2017).
- Rytter, A. Vibration Based Inspection of Civil Engineering Structures. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 1993. [Google Scholar]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A Summary Review of Vibration-Based Damage Identification Methods; Technical Report LA-UR-98-0375; Los Alamos National Laboratory: Los Alamos, NM, USA, 1997.
- Sohn, H.; Farrar, C.R.; Hemez, F.; Czarnecki, J. A Review of Structural Health Monitoring Literature: 1996–2001; Technical Report LA-13976-MS; Los Alamos National Laboratory: Los Alamos, NM, USA, 2001.
- Worden, K.; Dulieu-Barton, J.M. An overview of intelligent fault detection in systems and structures. Int. J. Struct. Health Monit. 2004, 3, 85–98. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage Identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–92. [Google Scholar] [CrossRef]
- Story, B. Structural Impairment Detection Using Arrays of Competitive Artificial Neural Networks. Ph.D. Thesis, University of Texas A&M, College Station, TX, USA, 2012. [Google Scholar]
- Seo, J.; Hu, J.; Lee, J. Summary review of structural health monitoring applications for highway bridges. J. Perform. Constr. Facil. 2015, 30. [Google Scholar] [CrossRef]
- Das, S.; Saha, P.; Patro, S.K. Vibration-based damage detection techniques used for health monitoring of structures: A review. J. Civ. Struct. Health Monit. 2016, 6, 477–507. [Google Scholar] [CrossRef]
- Turer, A. Conditional Evaluation and Load Rating of Steel Stringer Highway Bridges Using Field Calibrated 2D-Grid and 3D-FE Models. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, 2000. [Google Scholar]
- Zaurin, R.; Catbas, F.N. Integration of computer imaging and sensor data for structural health monitoring of bridges. Smart Mater. Struct. 2010, 19. [Google Scholar] [CrossRef]
- Zaurin, R.; Catbas, F.N. Structural health monitoring using video stream, influence lines, and statistical analysis. Struct. Health Monit. 2010, 10, 309–332. [Google Scholar] [CrossRef]
- Story, B.A.; Fry, G.T. Methodology for designing diagnostic data streams for use in a structural impairment detection system. J. Bridge Eng. 2013, 19. [Google Scholar] [CrossRef]
- Story, B.A.; Fry, G.T. A structural impairment detection system using competitive arrays of artificial neural networks. Comput. Aided Civ. Infrastruct. Eng. 2014, 29, 180–190. [Google Scholar] [CrossRef]
- Zeinali, Y.; Story, B.A. Structural impairment detection using deep counter propagation neural networks. J. Procedia Eng. 2016, 145, 868–875. [Google Scholar] [CrossRef]
- Sładek, J.; Ostrowska, K.; Kohut, P.; Holak, K.; Gaska, A.; Uhl, T. Development of a vision based deflection measurement system and its accuracy assessment. Measurement 2013, 46, 1237–1249. [Google Scholar] [CrossRef]
- Oh, B.K.; Hwang, J.W.; Kim, Y.; Cho, T.; Park, H.S. Vision-based system identification technique for building structures using a motion capture system. J. Sound Vib. 2015, 356, 72–85. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Experimental validation of cost-effective vision-based structural health monitoring. Mech. Syst. Signal Process. 2017, 88, 199–211. [Google Scholar] [CrossRef]
- Catbas, F.N.; Zaurin, R.; Susoy, M.; Gul, M. Integrative Information System Design for Florida Department of Transportation: A Framework for Structural Health Monitoring of Movable Bridges; Final Report BD548-11; Florida Department of Transportation: Tallahassee, FL, USA, 2007. [Google Scholar]
- Chen, Z.; Zhu, S.; Xu, Y.; Li, Q.; Cai, Q. Damage detection in long suspension bridges using stress influence lines. J. Bridge Eng. 2014, 20. [Google Scholar] [CrossRef]
- Turer, A.; Levi, A.; Aktan, A.E. Instrumentation Proof-Testing and Monitoring of Three Reinforced Concrete Deck-on-Steel Girder Bridges Prior to, During and after Superload; University of Cincinnati Infrastructure Institute: Cincinnati, OH, USA, 1998. [Google Scholar]
- Catbas, F.N.; Zaurin, R.; Gul, M.; Gokce, H. Sensor networks, computer imaging, and unit influence lines for structural health monitoring: Case study for bridge load rating. J. Bridge Eng. 2012, 17, 662–670. [Google Scholar] [CrossRef]
- Zaurin, R.; Khuc, T.; Catbas, F. Hybrid sensor-camera monitoring for damage detection: Case study of a real bridge. J. Bridge Eng. 2016, 21. [Google Scholar] [CrossRef]
- Bernal, D. Damage localization and quantification from the image of changes in flexibility. J. Eng. Mech. 2014, 140, 279–286. [Google Scholar] [CrossRef]
- Catbas, F.N.; Lenett, M.; Aktan, A.E.; Brown, D.L.; Helmicki, A.J.; Hunt, V. Damage Detection and Condition Assessment of Seymour Bridge; Proceedings of the SPIE Series; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 1998; pp. 1694–1702. [Google Scholar]
- Stimac, I. Influence of sampling interval on deflection-influence-line-based damage detection in beams. In Proceedings of the 5th International Conference on Civil Engineering-Science and Practice, Žabljak, Montenegro, 17–21 February 2014; pp. 355–361. [Google Scholar]
- Stimac, I.; Grandić, D.; Bjelanović, A. Comparison of techniques for damage identification based on influence line approach. Mach. Technol. Mater. 2011, 7, 9–13. [Google Scholar]
- Stimac, I.; Mihanović, A.; Kožar, I. Damage detection from analysis of displacement influence lines. In Proceedings of the International Conference on Bridges (Structural Engineering Conferences), Dubrovnik, Croatia, 21–24 May 2006; pp. 1001–1008. [Google Scholar]
- Wang, C.Y.; Huang, C.K.; Chen, C.S. Damage assessment of beam by a quasi-static moving vehicular load. Adv. Adapt. Data Anal. 2011, 3, 417–445. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X. Beam damage localization method considering random uncertainty using mid-span displacement data. In Proceedings of the Sustainable Development of Critical Infrastructure, Shanghai, China, 16–18 May 2014; pp. 438–446. [Google Scholar] [CrossRef]
- Li, X.Y.; Law, S.S. Adaptive Tikhonov regularization for damage detection based on nonlinear model updating. J. Mech. Syst. Signal Process. 2010, 24, 1646–1664. [Google Scholar] [CrossRef]
- Mathworks. Global Optimization Toolbox: User’s Guide (r2017b). 2017. Available online: http://www.mathworks.com/help/pdf_doc/gads/gads_tb.pdf (accessed on 30 November 2017).
- Zeinali, Y.; Li, Y.; Rajan, D.; Story, B.A. Accurate structural dynamic response monitoring of multiple structures using one CCD camera and a novel targets configuration. In Proceedings of the 11th International Workshop on Structural Health Monitoring, Palo Alto, CA, USA, 12–14 September 2017; pp. 3107–3114. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| - | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeinali, Y.; Story, B.A. Framework for Flexural Rigidity Estimation in Euler-Bernoulli Beams Using Deformation Influence Lines. Infrastructures 2017, 2, 23. https://doi.org/10.3390/infrastructures2040023
Zeinali Y, Story BA. Framework for Flexural Rigidity Estimation in Euler-Bernoulli Beams Using Deformation Influence Lines. Infrastructures. 2017; 2(4):23. https://doi.org/10.3390/infrastructures2040023
Chicago/Turabian StyleZeinali, Yasha, and Brett A. Story. 2017. "Framework for Flexural Rigidity Estimation in Euler-Bernoulli Beams Using Deformation Influence Lines" Infrastructures 2, no. 4: 23. https://doi.org/10.3390/infrastructures2040023
APA StyleZeinali, Y., & Story, B. A. (2017). Framework for Flexural Rigidity Estimation in Euler-Bernoulli Beams Using Deformation Influence Lines. Infrastructures, 2(4), 23. https://doi.org/10.3390/infrastructures2040023