Bridges are critical transport infrastructure assets whose failure has severe consequences in terms of losses and casualties. Scour and earthquakes pose significant threats to bridge safety [
1,
2,
3,
4]. Many bridges with underwater foundations are located in earthquake-prone countries, and scour not only directly affects the stability of these bridges but also makes them more susceptible to damage from earthquakes [
5,
6,
7]. Bridge scour refers to the erosion of soil surrounding the supports of a bridge, such as its abutments and piers, caused by the movement of water [
8,
9]. This phenomenon has a detrimental impact on the bridge’s structural integrity by diminishing its foundation bearing capacity and by decreasing the overall stiffness of the soil–foundation–structure (SFS) system. The stiffness reduction results in a different response of the structure to other dynamic loads, such as earthquakes. Current codes lack comprehensive guidance for assessing and designing bridges to withstand the combined effects of earthquake and scour hazards. However, many researchers have investigated the issue. For example, Wang et al. [
10] investigated the dynamic behaviour and seismic performance of different types of reinforced concrete girder bridges, such as multi-span, simply supported, multi-span continuous, and single-frame bridges, under various scour conditions. They observed that scour can have a significantly different impact on the period elongation, and on the seismic response for different types of bridges, while enlarged shaft foundations can be effective in protecting bridges in earthquake and flood-prone areas. Prasad and Banerjee [
11] evaluated the seismic performance of reinforced concrete bridges pre-exposed to various flood intensities and scour scenarios by means of nonlinear time history analyses. They concluded that the damageability of the bridge piers increases nonlinearly for increasing scour depth, and that even a low-intensity flood causes a significant degradation of the seismic performance. Yilmaz et al. [
12] numerically assessed the performance of two real California bridges under the multi-hazard condition of flood-induced scour and earthquake by means of fragility analysis. The results showed that flood events can increase the seismic vulnerability and risk of bridges, yet larger-diameter foundations tend to reduce the impact of scour hazard on bridge seismic performance. Guo et al. [
13] performed time-dependent fragility analyses to box girder concrete bridge systems to investigate their seismic performance under combined seismic and scour hazards over their whole service life. Song et al. [
14] developed an analytical approach to assess the potential of earthquake damage for bridges with scoured foundations, showing that relatively low scour depths may cause foundation damage during an earthquake, even for bridges designed to provide satisfactory seismic performance. Fialko and Alipour [
15] investigated the significance of non-uniform scour on the seismic performance of bridges. They concluded that for increasing scour depth scenarios, the amount of seismic energy experienced by the structure decreases, while the increasing flexibility of the foundation support results in an increasing displacement demand to other components of the structure. Han et al. [
16] investigated the seismic response of a single-pylon cable-stayed bridge founded on a pile group under various scour scenarios, and they concluded that for increasing scour depths, the bending moment on the piles increases, whereas the bending moment demand on the pier decreases, and that the failure mode of the bridge moves from the pier to the piles and the abutments. Zaky et al. [
17] assessed the influence of scour on the seismic performance of the piled-foundation Boğaçay Bridge in Turkey. They concluded that increasing scour width leads to a significant increase in pier displacement demands, especially in the transverse direction of the bridge. Moreover, they observed that the internal forces of the pier decrease significantly because of the migration and spreading of plastic hinging from piers to piles due to scouring. Foti et al. [
18] provided an overview of conventional approaches to assess the performance of scoured bridges against seismic actions, including an application to an SFS system with caisson foundations. They concluded that advanced modelling of the impact of scour is essential, because of the drawback of the simplified conventional approaches’ applicability to capture the decreasing foundation capacity for increasing scour geometries. A significant number of experimental studies have also investigated the problem by performing tests on real systems or scaled models (see, e.g., [
19,
20,
21]).
Other studies considering shallow foundations have only investigated the dynamic behaviour of bridges affected by scour and not the seismic response. Malekjafarian et al. [
23] provided an experimental demonstration of a mode-shape-based scour-monitoring method by analysing the scaled model of a multi-span bridge prototype with shallow foundations. Antonopoulos et al. [
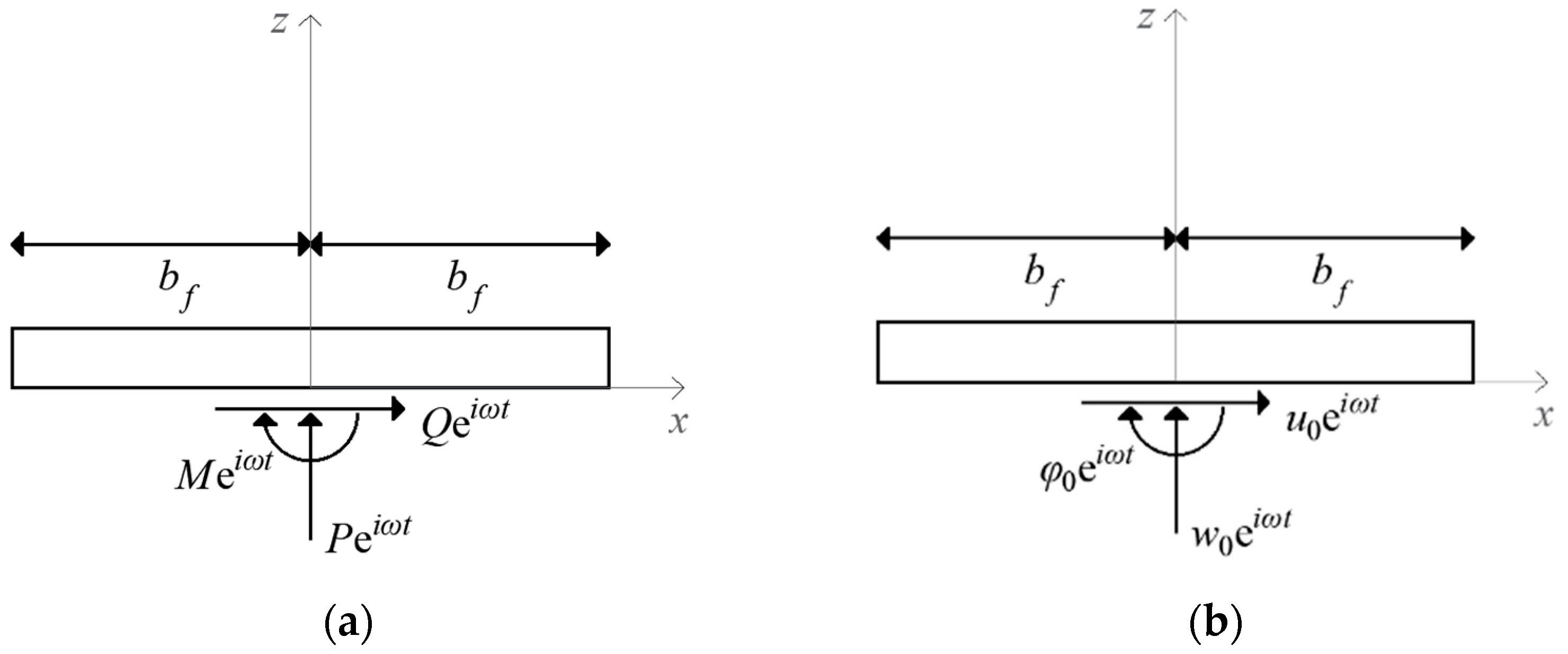
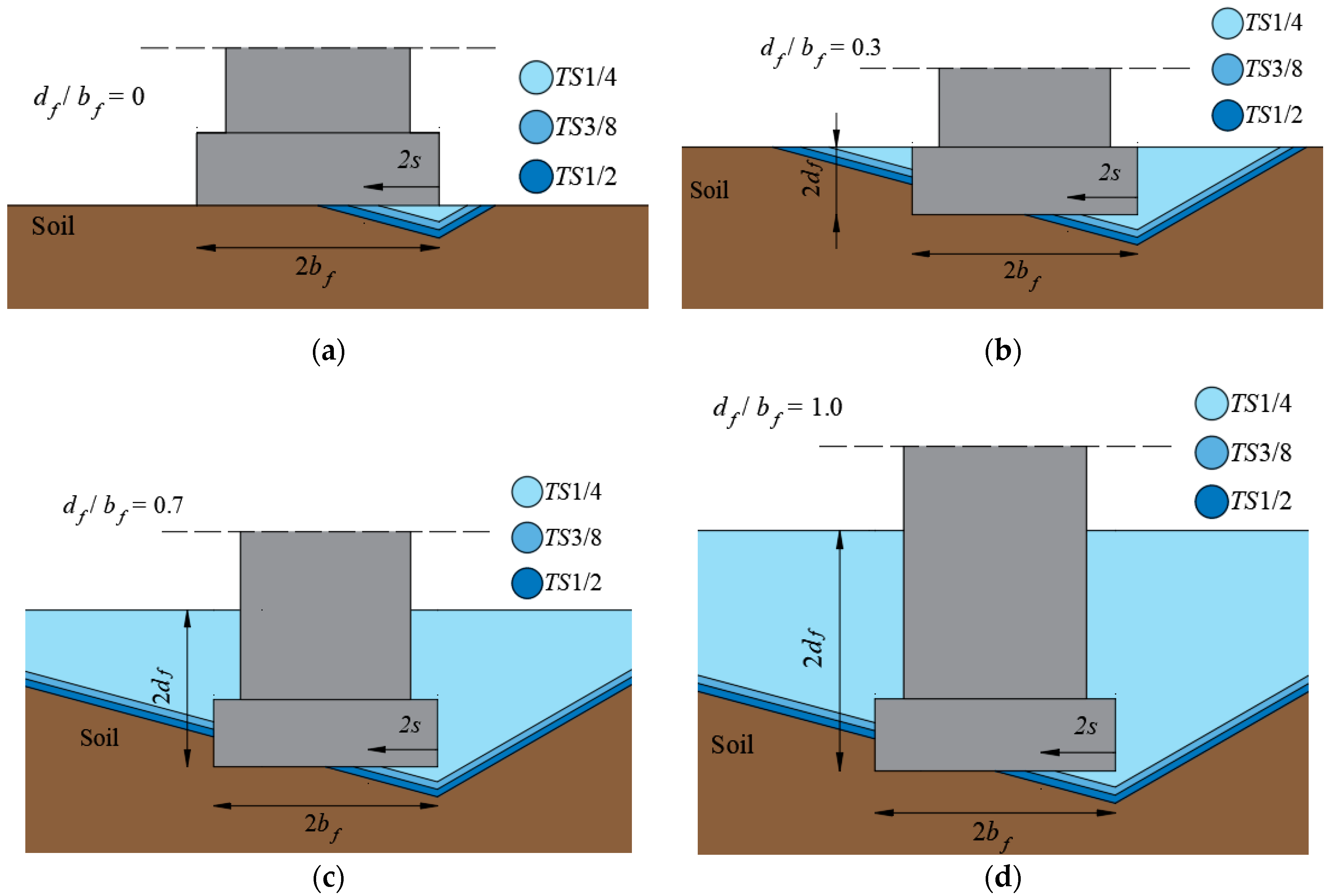
24] proposed a numerical strategy for evaluating the non-dimensional impedance functions for shallow foundations simply resting on the ground surface under various levels of local scour. These impedance functions were employed in an extensive parametric study to evaluate the impact of scour on the fundamental vibration frequency of SFS systems. Tubaldi et al. [
25] illustrated the outcomes of a free-field full-scale experimental campaign, where operational modal analysis was performed to evaluate the effects of scour in terms of changes in the dynamic properties of EuroProteas, a prototype structure with a shallow foundation simply resting on the ground surface. Various modelling approaches were also presented to estimate the effect of scour on the dynamic behaviour of EuroProteas, by also considering the influence of the embedded depth of the foundation.
From the analysis of the literature, it is evident that further research is needed to investigate the influence of scour on the dynamic behaviour and seismic response of bridges with shallow foundations. Building on the previous work carried out by the same authors of this study [
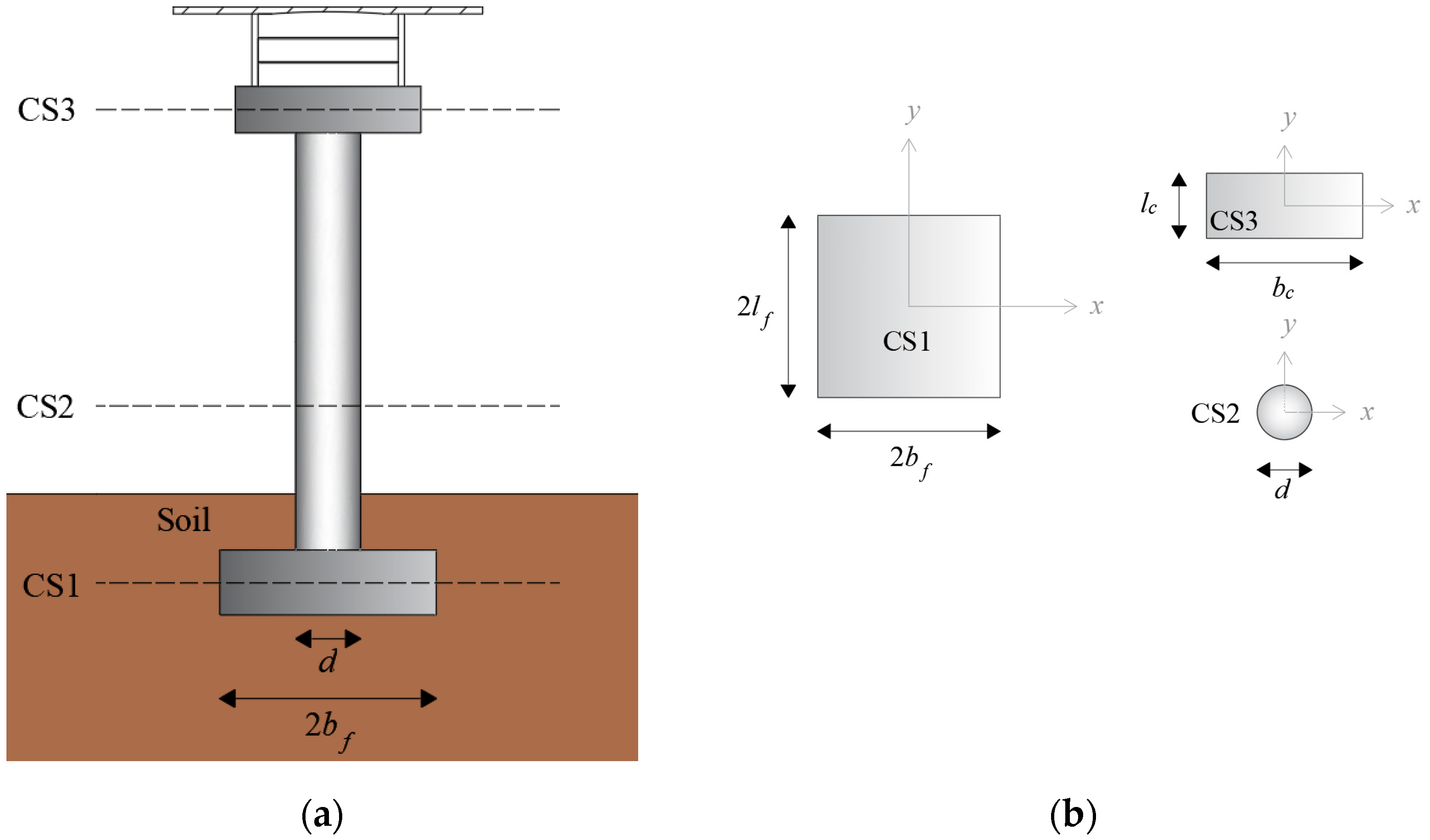
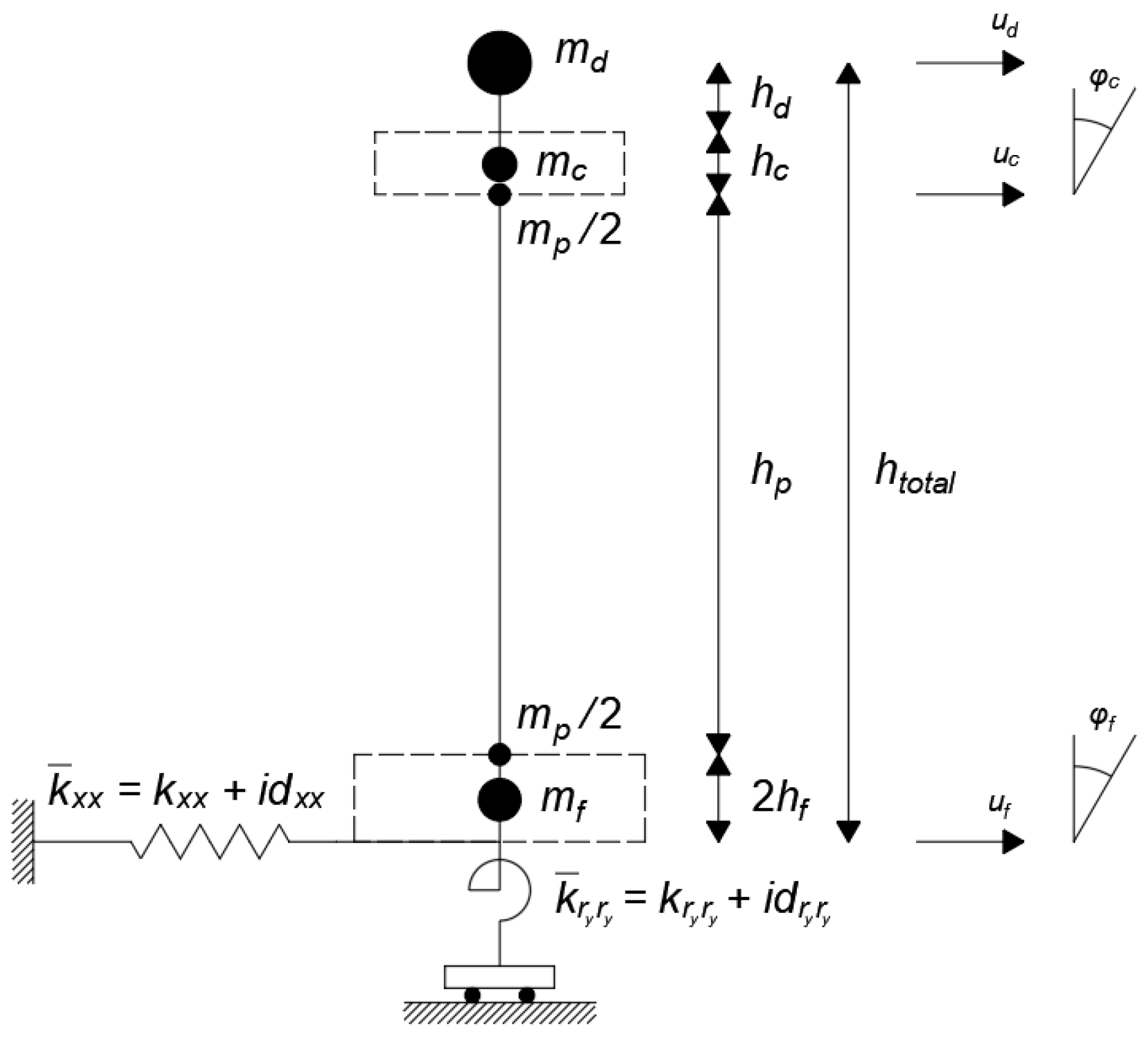
24], this paper aims to fill this knowledge gap. In particular, the main novel aspects of this study are as follows: (1) a more complex and realistic superstructure model was considered, by including more degrees of freedom for the superstructure compared to the model of [
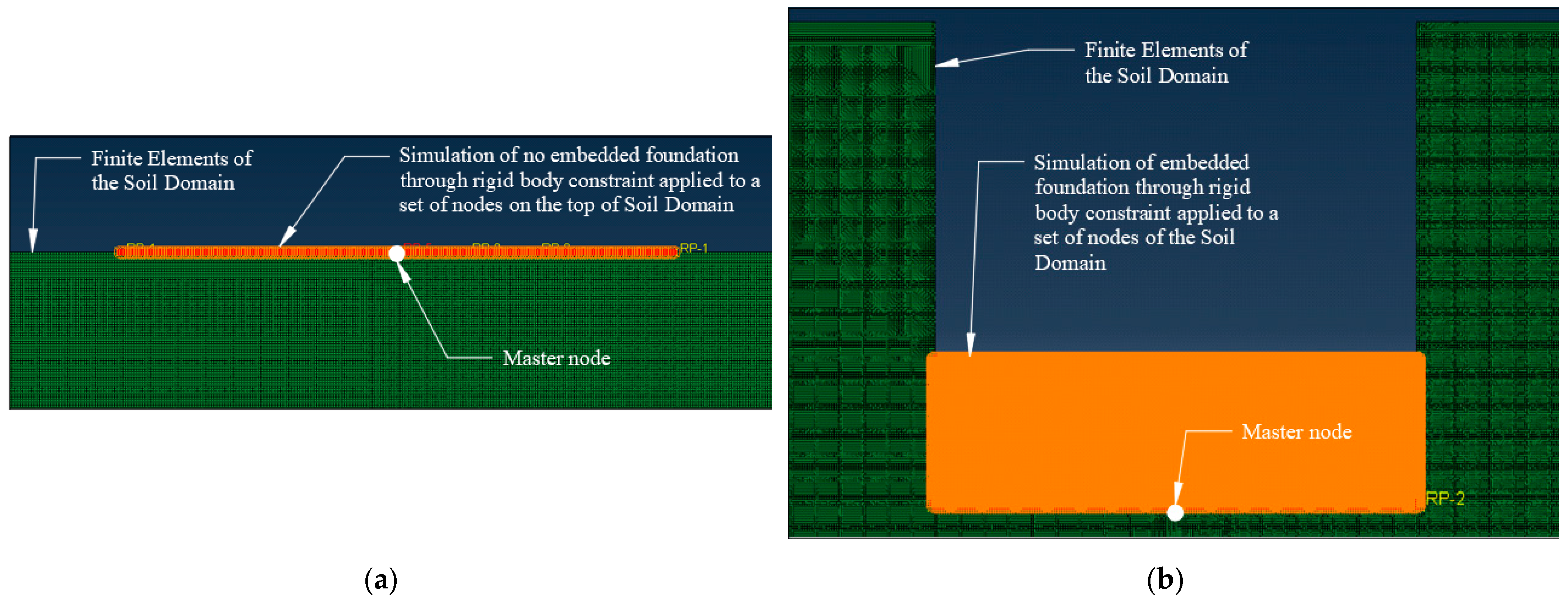
24], where the superstructure is treated as an sdof system; (2) impedance functions were derived by considering different values of the embedded depth of the foundation, as opposed to zero embedment in [
24]; and (3) analysis of the seismic response of bridge prototypes was carried out, whereas [
24] only investigated the variation in fundamental frequency.
Section 2 illustrates the investigated SFS system, and the modelling approach for the estimation of the foundation impedance functions, the dynamic behaviour, and the seismic response of the SFS system for different scour scenarios.
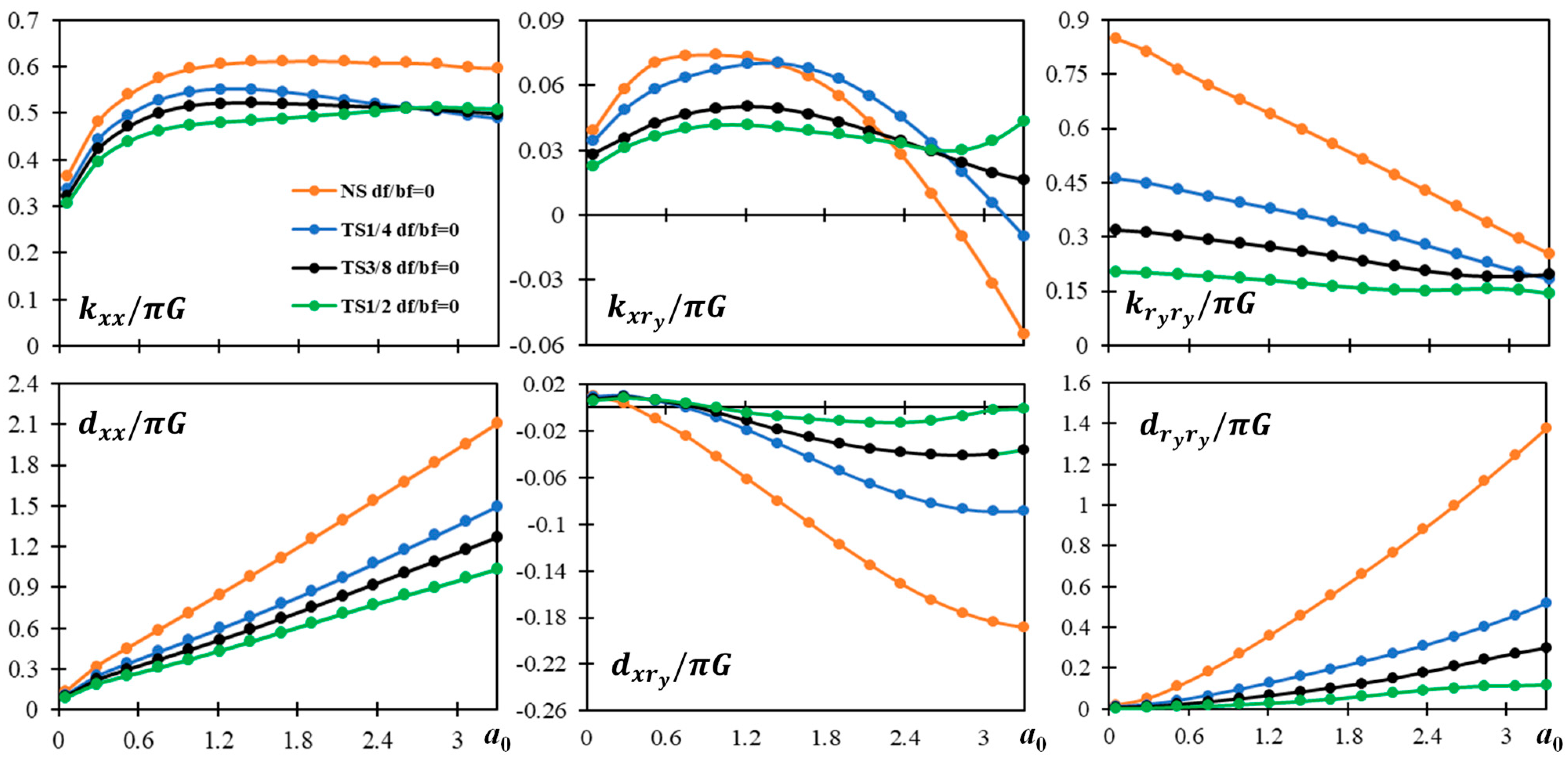
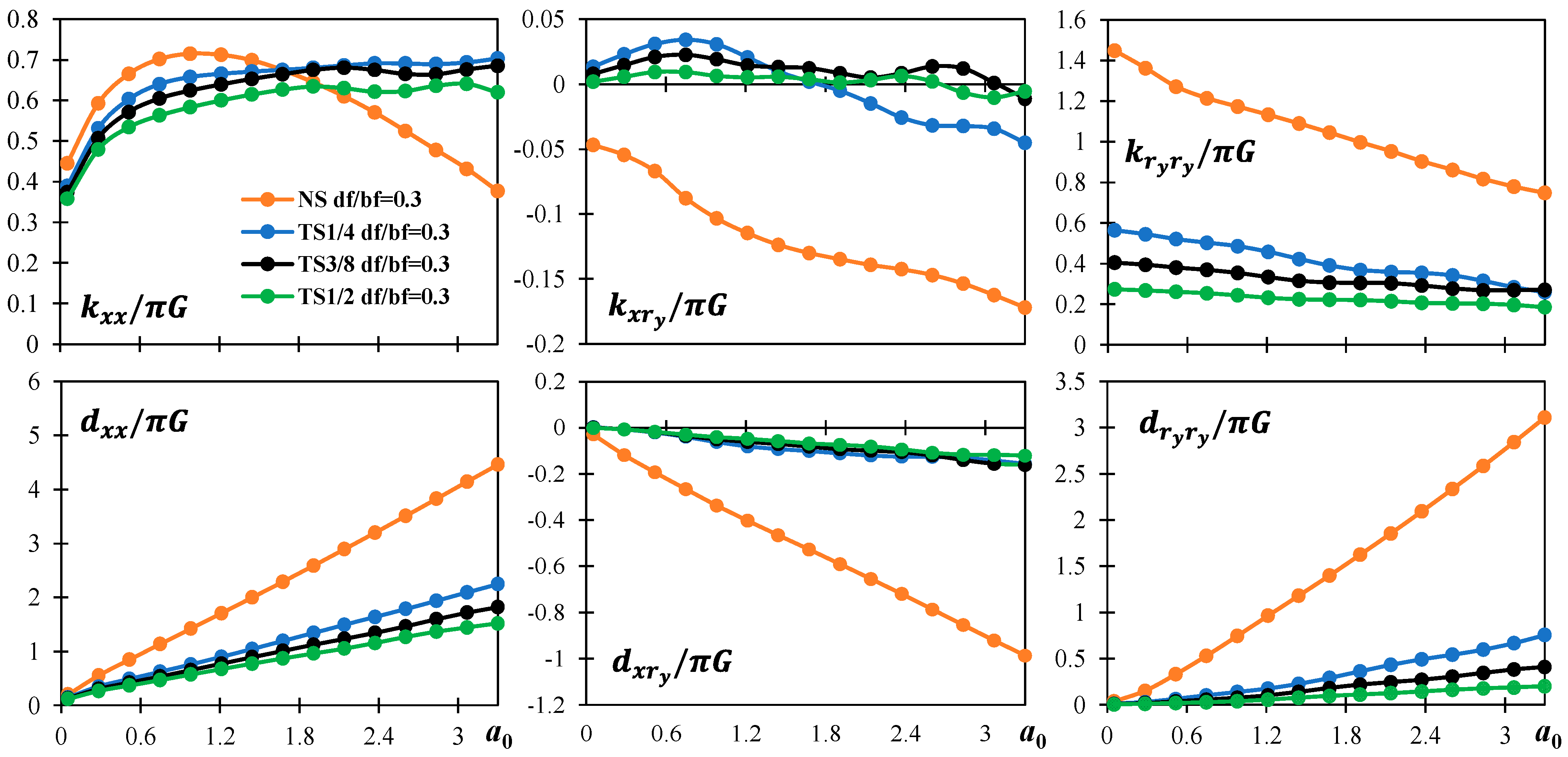
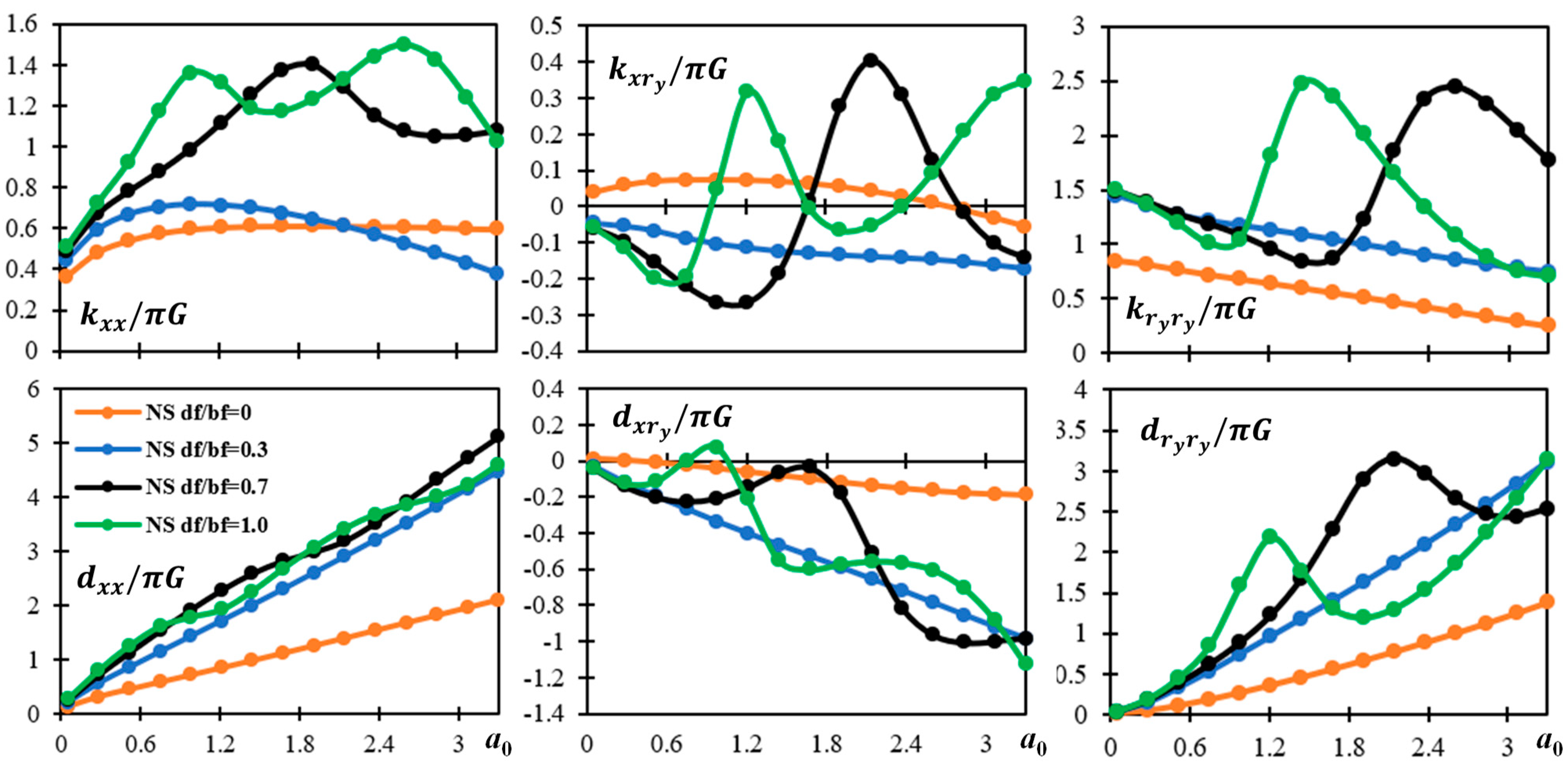
Section 3 presents the impedance functions for the various scour and embedded depth cases considered.
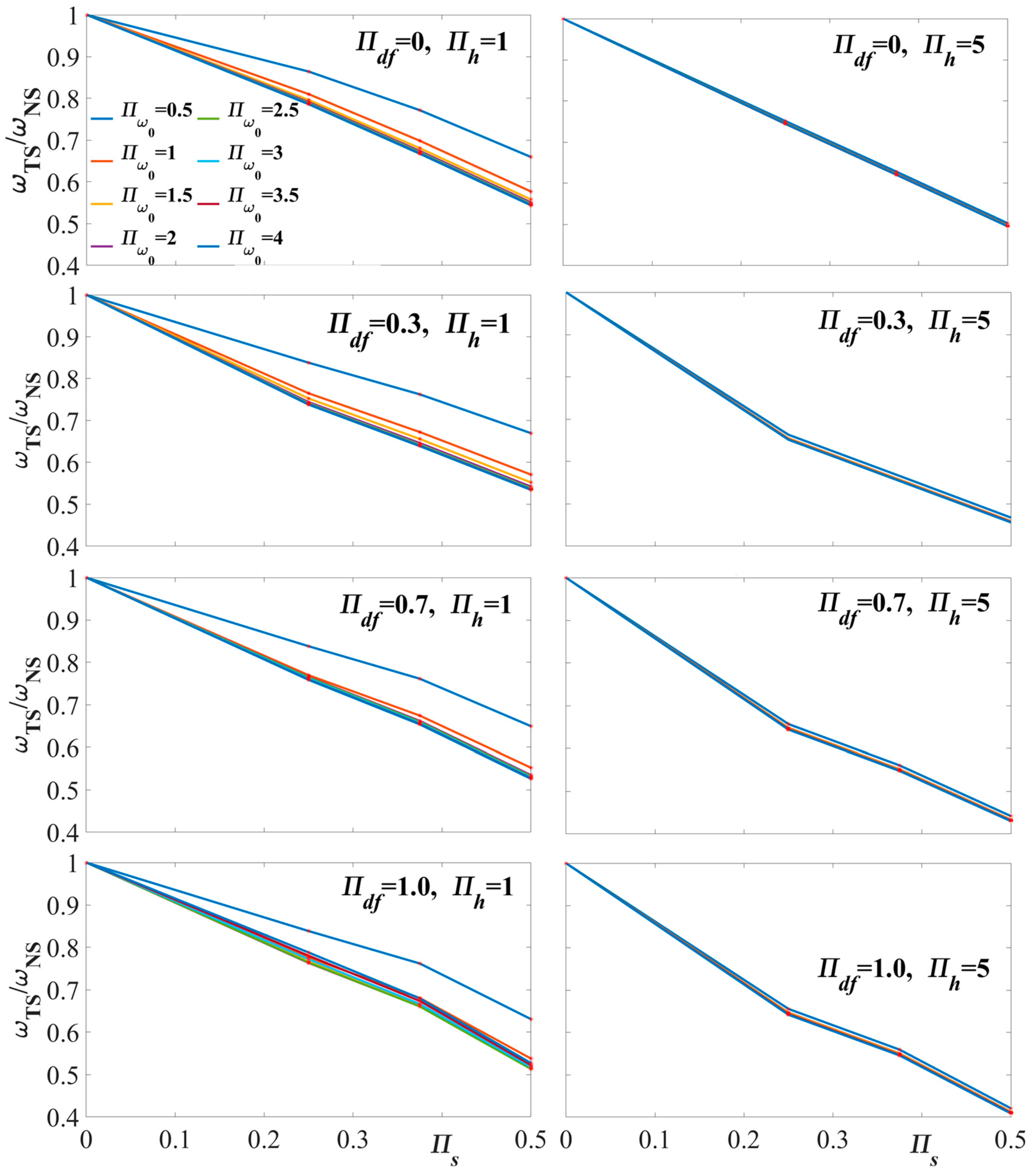
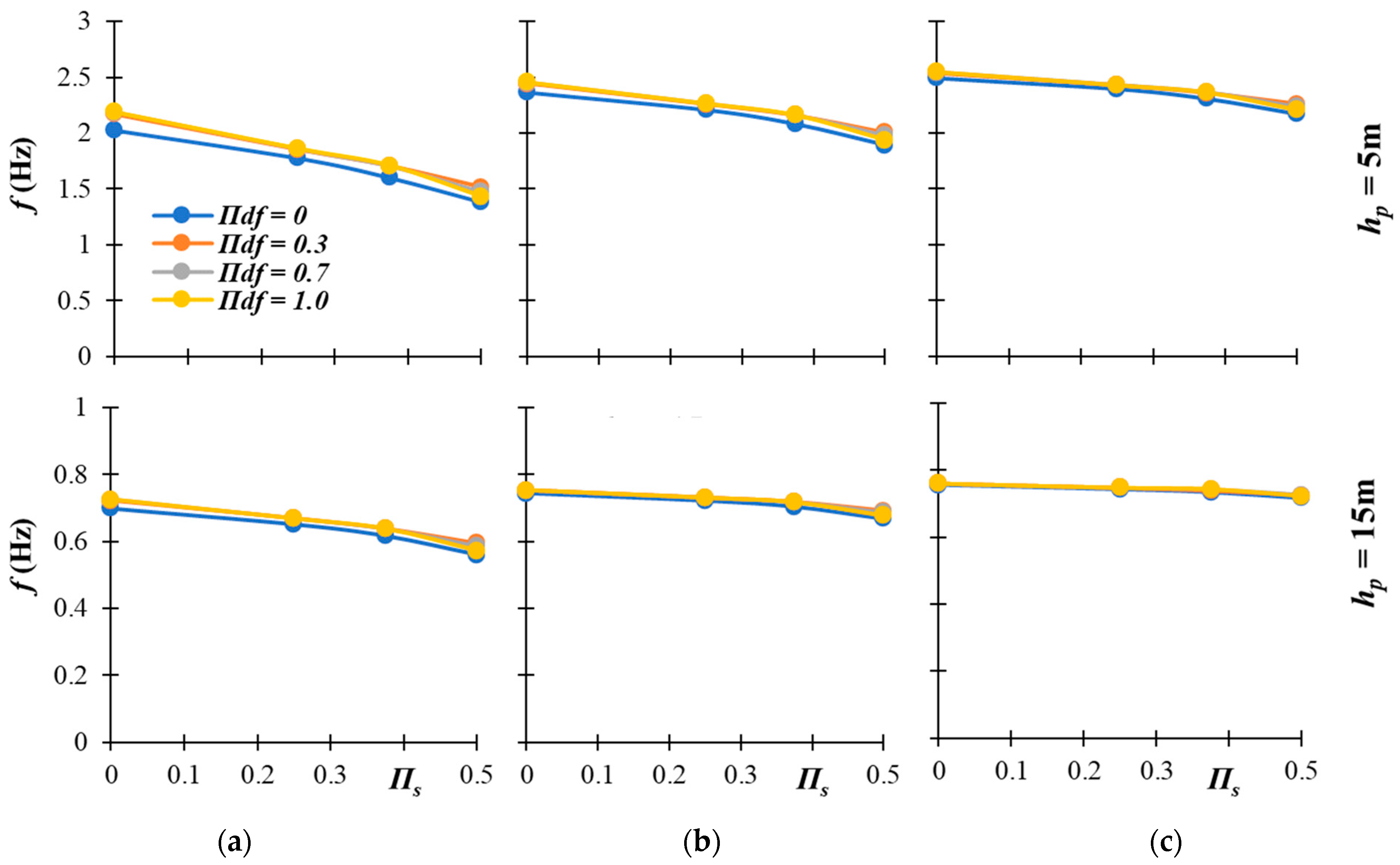
Section 4 presents the result of an extensive parametric study investigating the effect of scour on the SFS system, for a wide range of superstructure mechanical and geometrical properties and soil conditions.
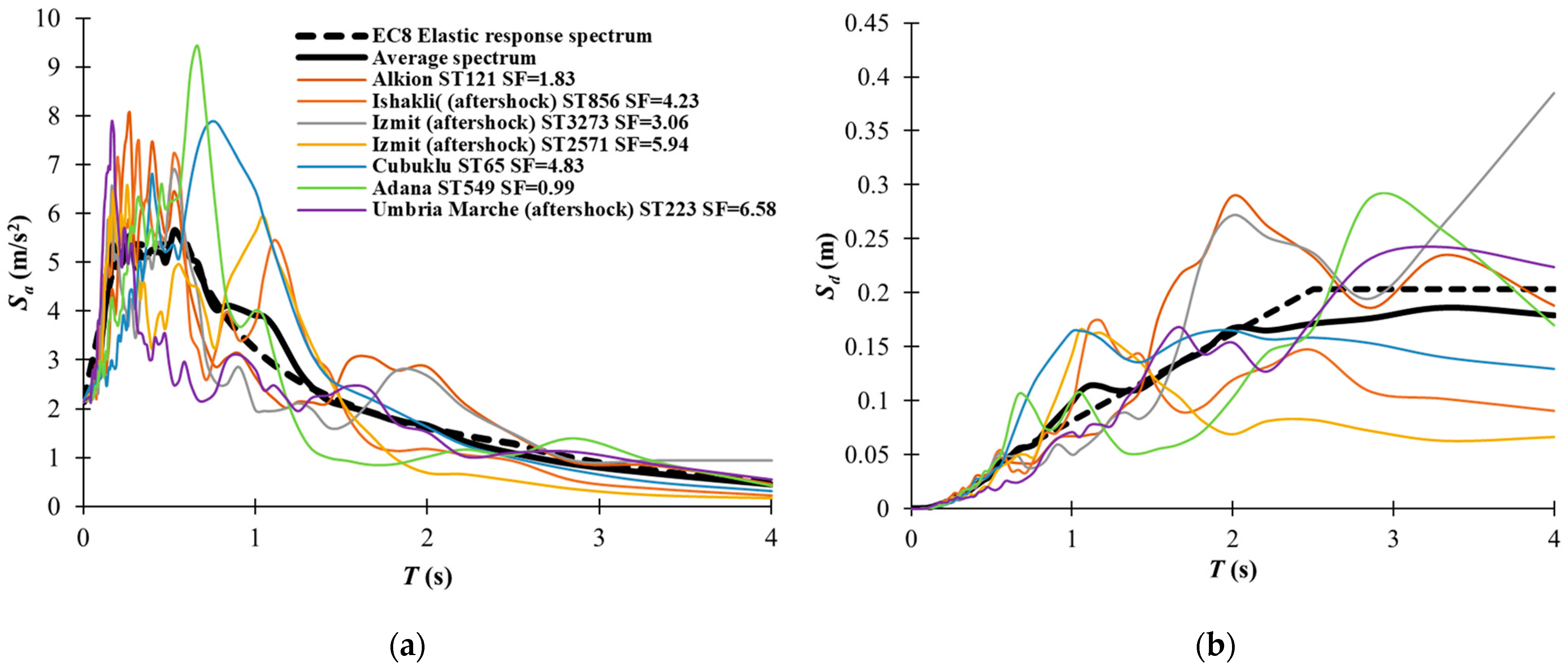
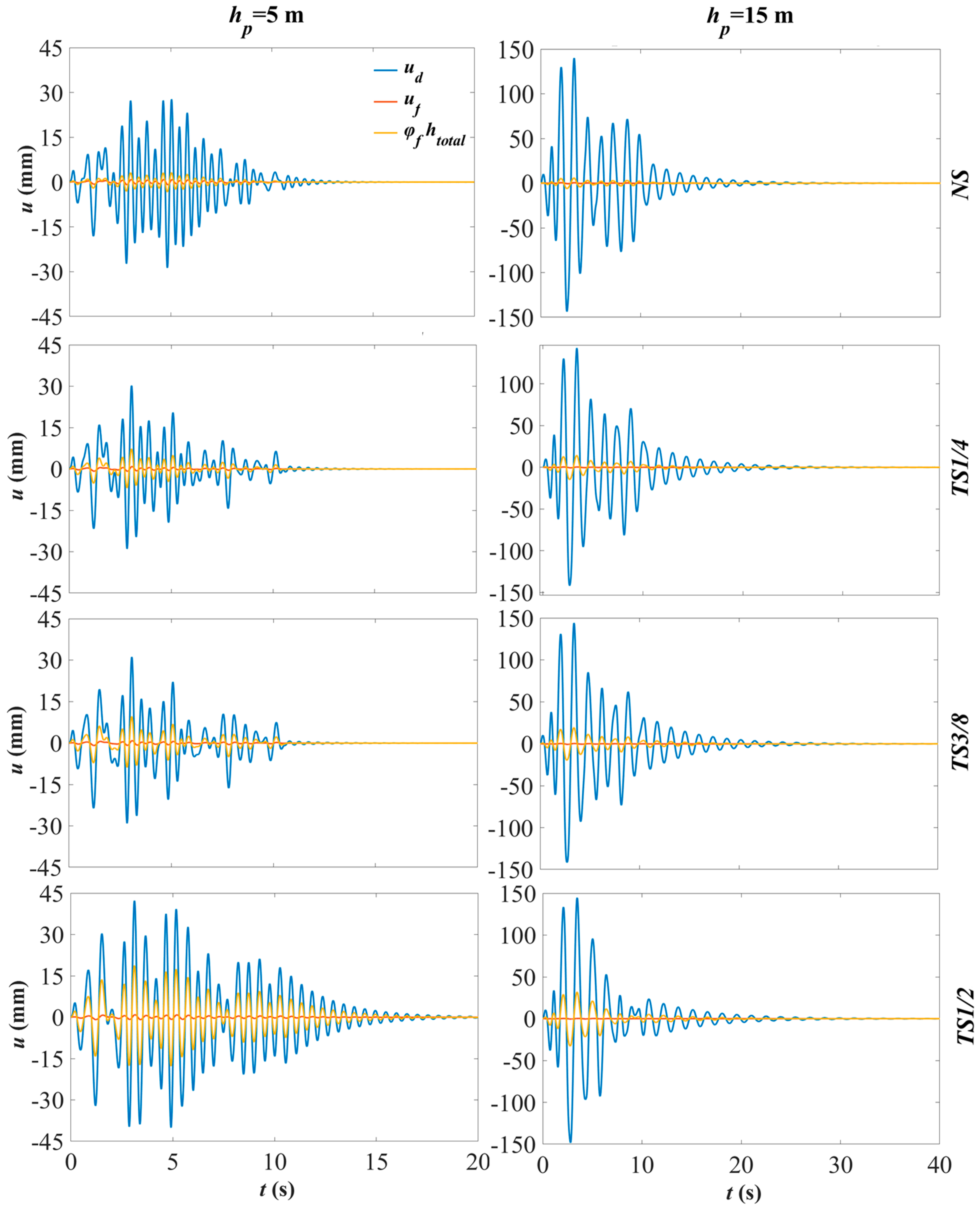
Section 5 investigates the seismic response of some representative bridge prototypes by means of time history analyses.
Section 6 ummarises the main findings of the study and future works needed.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}